Гравіметрична система з високоточним виставленням осі чутливості гравіметра
Номер патенту: 90627
Опубліковано: 11.05.2010
Автори: Безвесільна Олена Миколаївна, Подчашинський Юрій Олександрович, Ткаченко Світлана Сергіївна, Киричук Юрій Володимирович, Остапчук Анна Анатоліївна
Формула / Реферат
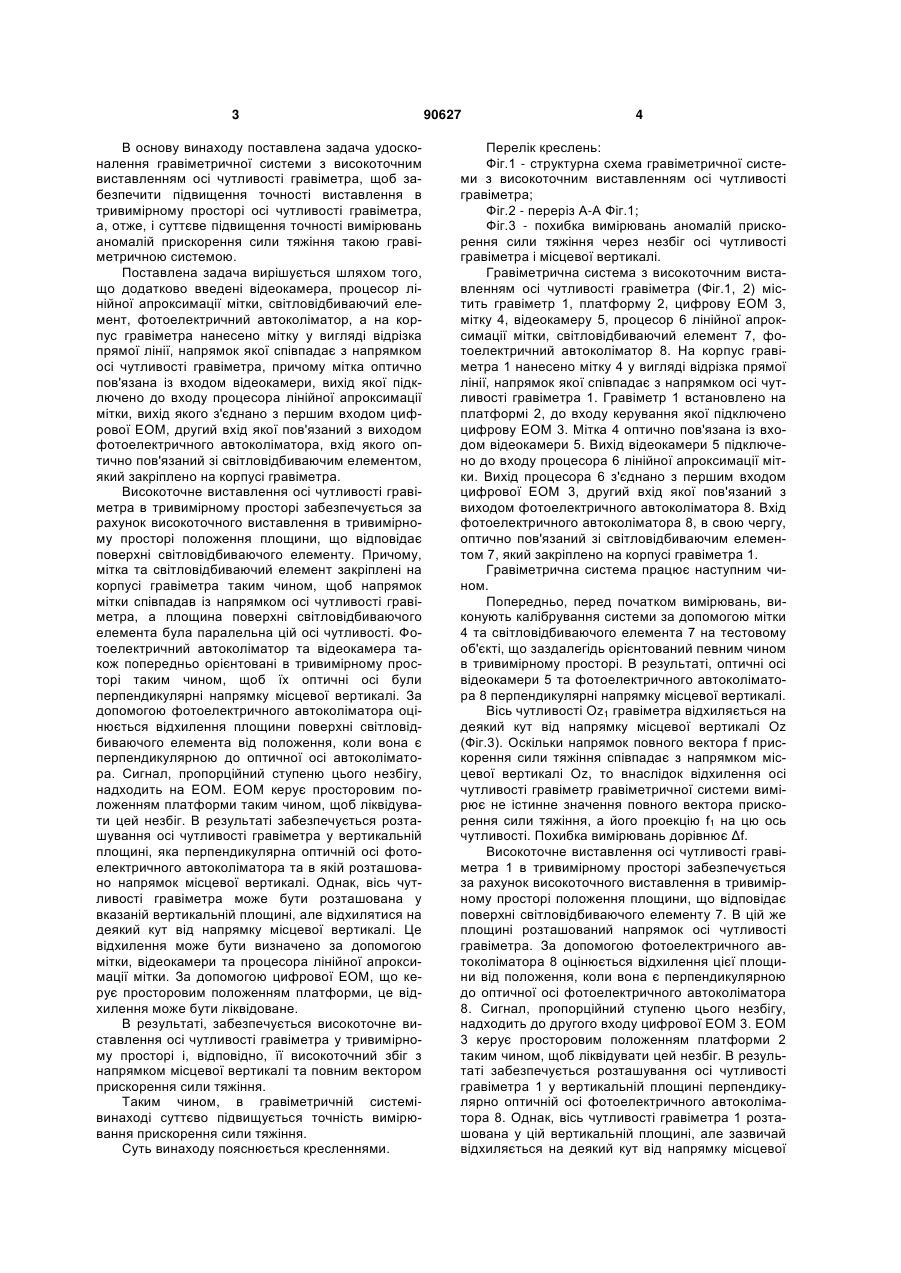
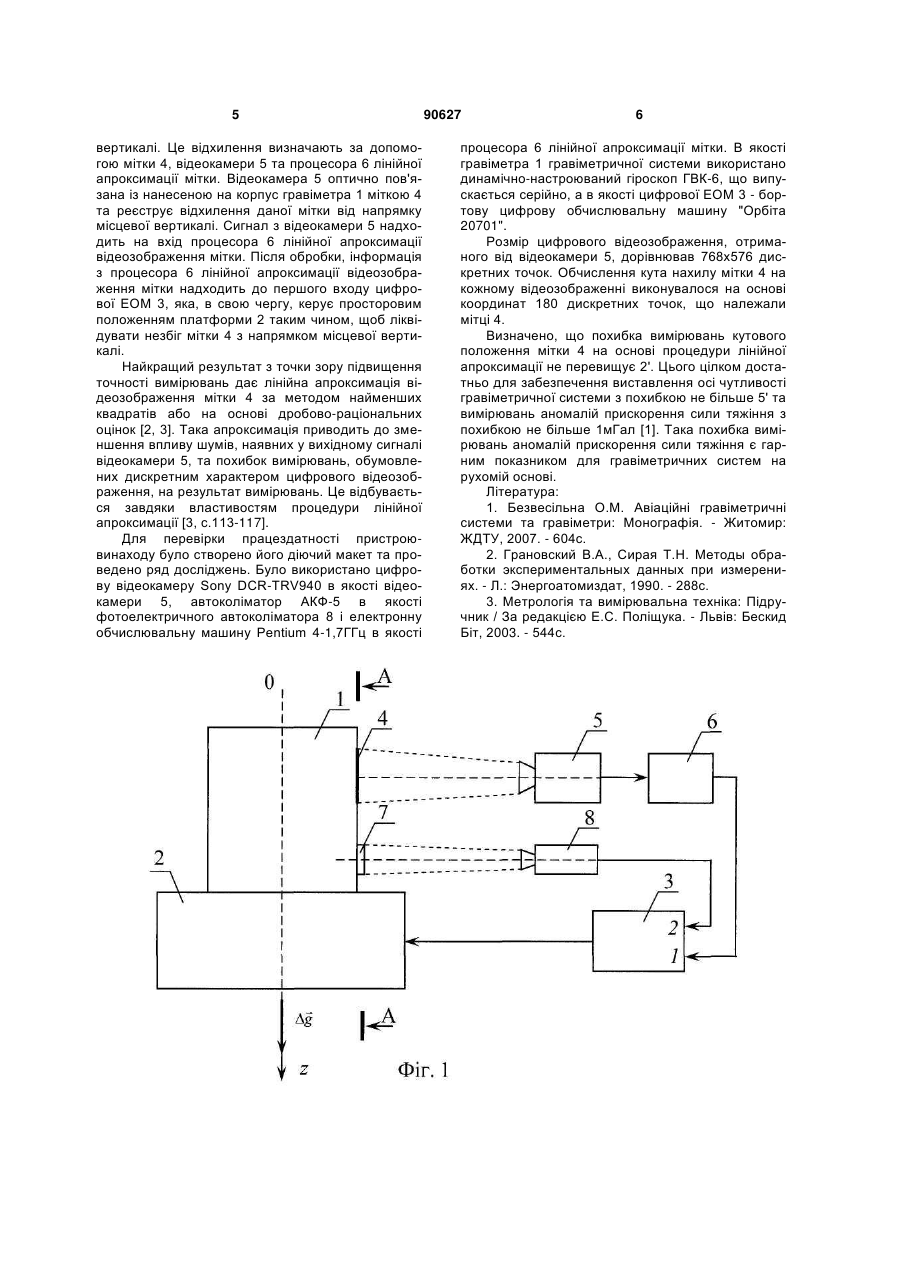
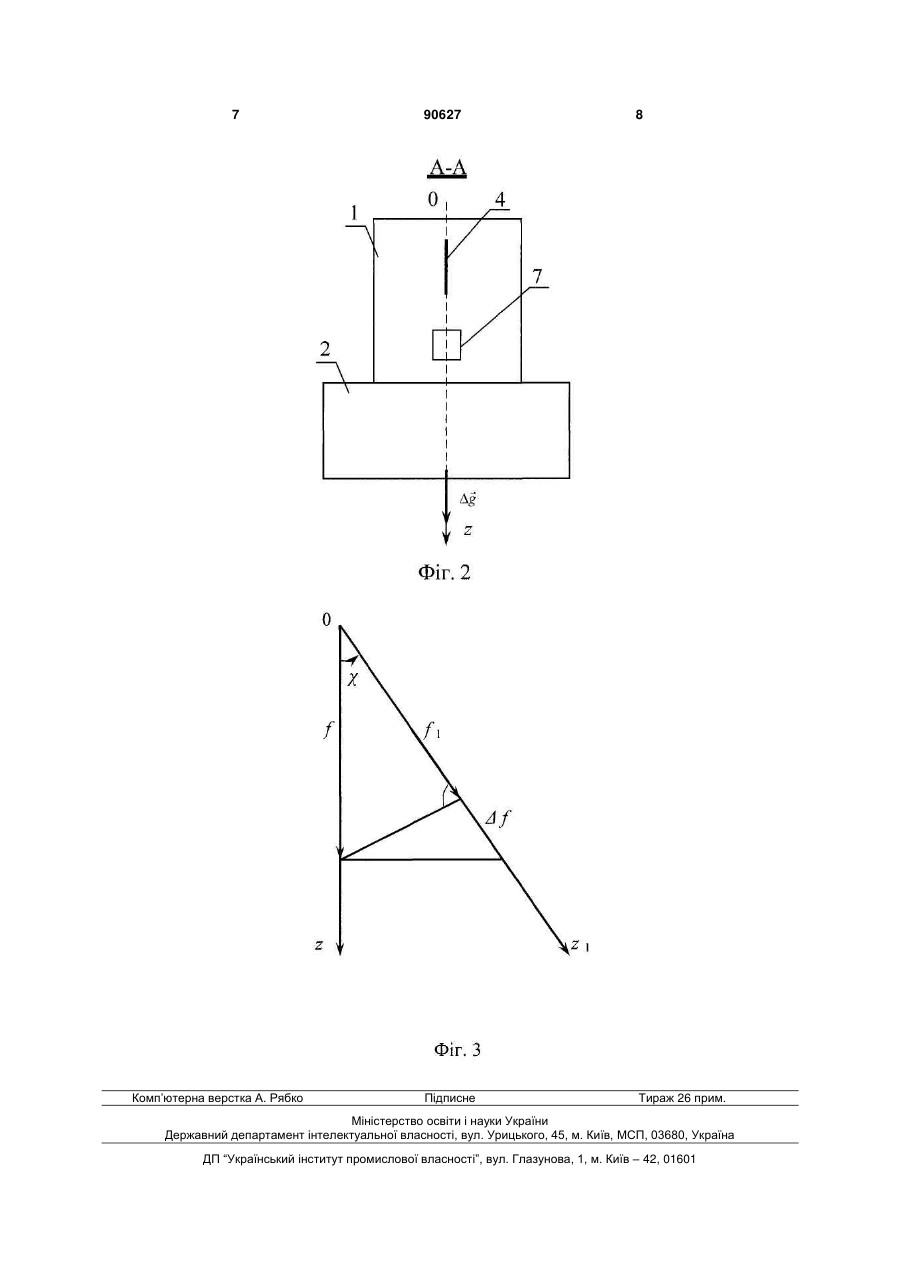
Гравіметрична система з високоточним виставленням осі чутливості гравіметра, що містить гравіметр (1), встановлений на платформі (2), до входу керування якої підключена цифрова електронна обчислювальна машина (ЕОМ) (3), яка відрізняється тим, що додатково містить відеокамеру (5), процесор (6) лінійної апроксимації мітки, світловідбиваючий елемент (7), фотоелектричний автоколіматор (8), а на корпус гравіметра (1) нанесена мітка (4) у вигляді відрізка прямої лінії, напрямок якої співпадає з напрямком осі чутливості гравіметра (1), причому мітка (4) оптично пов'язана із входом відеокамери (5), вихід якої підключений до входу процесора (6) лінійної апроксимації мітки, вихід якого з'єднаний з першим входом цифрової ЕОМ (3), другий вхід якої з'єднаний з виходом фотоелектричного автоколіматора (8), вхід якого оптично пов'язаний зі світловідбиваючим елементом (7), який закріплений на корпусі гравіметра (1).
Текст
Гравіметрична система з високоточним виставленням осі чутливості гравіметра, що містить 3 В основу винаходу поставлена задача удосконалення гравіметричної системи з високоточним виставленням осі чутливості гравіметра, щоб забезпечити підвищення точності виставлення в тривимірному просторі осі чутливості гравіметра, а, отже, і суттєве підвищення точності вимірювань аномалій прискорення сили тяжіння такою гравіметричною системою. Поставлена задача вирішується шляхом того, що додатково введені відеокамера, процесор лінійної апроксимації мітки, світловідбиваючий елемент, фотоелектричний автоколіматор, а на корпус гравіметра нанесено мітку у вигляді відрізка прямої лінії, напрямок якої співпадає з напрямком осі чутливості гравіметра, причому мітка оптично пов'язана із входом відеокамери, вихід якої підключено до входу процесора лінійної апроксимації мітки, вихід якого з'єднано з першим входом цифрової ЕОМ, другий вхід якої пов'язаний з виходом фотоелектричного автоколіматора, вхід якого оптично пов'язаний зі світловідбиваючим елементом, який закріплено на корпусі гравіметра. Високоточне виставлення осі чутливості гравіметра в тривимірному просторі забезпечується за рахунок високоточного виставлення в тривимірному просторі положення площини, що відповідає поверхні світловідбиваючого елементу. Причому, мітка та світловідбиваючий елемент закріплені на корпусі гравіметра таким чином, щоб напрямок мітки співпадав із напрямком осі чутливості гравіметра, а площина поверхні світловідбиваючого елемента була паралельна цій осі чутливості. Фотоелектричний автоколіматор та відеокамера також попередньо орієнтовані в тривимірному просторі таким чином, щоб їх оптичні осі були перпендикулярні напрямку місцевої вертикалі. За допомогою фотоелектричного автоколіматора оцінюється відхилення площини поверхні світловідбиваючого елемента від положення, коли вона є перпендикулярною до оптичної осі автоколіматора. Сигнал, пропорційний ступеню цього незбігу, надходить на ЕОМ. ЕОМ керує просторовим положенням платформи таким чином, щоб ліквідувати цей незбіг. В результаті забезпечується розташування осі чутливості гравіметра у вертикальній площині, яка перпендикулярна оптичній осі фотоелектричного автоколіматора та в якій розташовано напрямок місцевої вертикалі. Однак, вісь чутливості гравіметра може бути розташована у вказаній вертикальній площині, але відхилятися на деякий кут від напрямку місцевої вертикалі. Це відхилення може бути визначено за допомогою мітки, відеокамери та процесора лінійної апроксимації мітки. За допомогою цифрової ЕОМ, що керує просторовим положенням платформи, це відхилення може бути ліквідоване. В результаті, забезпечується високоточне виставлення осі чутливості гравіметра у тривимірному просторі і, відповідно, її високоточний збіг з напрямком місцевої вертикалі та повним вектором прискорення сили тяжіння. Таким чином, в гравіметричній системівинаході суттєво підвищується точність вимірювання прискорення сили тяжіння. Суть винаходу пояснюється кресленнями. 90627 4 Перелік креслень: Фіг.1 - структурна схема гравіметричної системи з високоточним виставленням осі чутливості гравіметра; Фіг.2 - переріз А-А Фіг.1; Фіг.3 - похибка вимірювань аномалій прискорення сили тяжіння через незбіг осі чутливості гравіметра і місцевої вертикалі. Гравіметрична система з високоточним виставленням осі чутливості гравіметра (Фіг.1, 2) містить гравіметр 1, платформу 2, цифрову ЕОМ 3, мітку 4, відеокамеру 5, процесор 6 лінійної апроксимації мітки, світловідбиваючий елемент 7, фотоелектричний автоколіматор 8. На корпус гравіметра 1 нанесено мітку 4 у вигляді відрізка прямої лінії, напрямок якої співпадає з напрямком осі чутливості гравіметра 1. Гравіметр 1 встановлено на платформі 2, до входу керування якої підключено цифрову ЕОМ 3. Мітка 4 оптично пов'язана із входом відеокамери 5. Вихід відеокамери 5 підключено до входу процесора 6 лінійної апроксимації мітки. Вихід процесора 6 з'єднано з першим входом цифрової ЕОМ 3, другий вхід якої пов'язаний з виходом фотоелектричного автоколіматора 8. Вхід фотоелектричного автоколіматора 8, в свою чергу, оптично пов'язаний зі світловідбиваючим елементом 7, який закріплено на корпусі гравіметра 1. Гравіметрична система працює наступним чином. Попередньо, перед початком вимірювань, виконують калібрування системи за допомогою мітки 4 та світловідбиваючого елемента 7 на тестовому об'єкті, що заздалегідь орієнтований певним чином в тривимірному просторі. В результаті, оптичні осі відеокамери 5 та фотоелектричного автоколіматора 8 перпендикулярні напрямку місцевої вертикалі. Вісь чутливості Oz1 гравіметра відхиляється на деякий кут від напрямку місцевої вертикалі Oz (Фіг.3). Оскільки напрямок повного вектора f прискорення сили тяжіння співпадає з напрямком місцевої вертикалі Oz, то внаслідок відхилення осі чутливості гравіметр гравіметричної системи вимірює не істинне значення повного вектора прискорення сили тяжіння, а його проекцію f1 на цю ось чутливості. Похибка вимірювань дорівнює Δf. Високоточне виставлення осі чутливості гравіметра 1 в тривимірному просторі забезпечується за рахунок високоточного виставлення в тривимірному просторі положення площини, що відповідає поверхні світловідбиваючого елементу 7. В цій же площині розташований напрямок осі чутливості гравіметра. За допомогою фотоелектричного автоколіматора 8 оцінюється відхилення цієї площини від положення, коли вона є перпендикулярною до оптичної осі фотоелектричного автоколіматора 8. Сигнал, пропорційний ступеню цього незбігу, надходить до другого входу цифрової ЕОМ 3. ЕОМ 3 керує просторовим положенням платформи 2 таким чином, щоб ліквідувати цей незбіг. В результаті забезпечується розташування осі чутливості гравіметра 1 у вертикальній площині перпендикулярно оптичній осі фотоелектричного автоколіматора 8. Однак, вісь чутливості гравіметра 1 розташована у цій вертикальній площині, але зазвичай відхиляється на деякий кут від напрямку місцевої 5 вертикалі. Це відхилення визначають за допомогою мітки 4, відеокамери 5 та процесора 6 лінійної апроксимації мітки. Відеокамера 5 оптично пов'язана із нанесеною на корпус гравіметра 1 міткою 4 та реєструє відхилення даної мітки від напрямку місцевої вертикалі. Сигнал з відеокамери 5 надходить на вхід процесора 6 лінійної апроксимації відеозображення мітки. Після обробки, інформація з процесора 6 лінійної апроксимації відеозображення мітки надходить до першого входу цифрової ЕОМ 3, яка, в свою чергу, керує просторовим положенням платформи 2 таким чином, щоб ліквідувати незбіг мітки 4 з напрямком місцевої вертикалі. Найкращий результат з точки зору підвищення точності вимірювань дає лінійна апроксимація відеозображення мітки 4 за методом найменших квадратів або на основі дробово-раціональних оцінок [2, 3]. Така апроксимація приводить до зменшення впливу шумів, наявних у вихідному сигналі відеокамери 5, та похибок вимірювань, обумовлених дискретним характером цифрового відеозображення, на результат вимірювань. Це відбувається завдяки властивостям процедури лінійної апроксимації [3, с.113-117]. Для перевірки працездатності пристроювинаходу було створено його діючий макет та проведено ряд досліджень. Було використано цифрову відеокамеру Sony DCR-TRV940 в якості відеокамери 5, автоколіматор АКФ-5 в якості фотоелектричного автоколіматора 8 і електронну обчислювальну машину Pentium 4-1,7ГГц в якості 90627 6 процесора 6 лінійної апроксимації мітки. В якості гравіметра 1 гравіметричної системи використано динамічно-настроюваний гіроскоп ГВК-6, що випускається серійно, а в якості цифрової ЕОМ 3 - бортову цифрову обчислювальну машину "Орбіта 20701". Розмір цифрового відеозображення, отриманого від відеокамери 5, дорівнював 768x576 дискретних точок. Обчислення кута нахилу мітки 4 на кожному відеозображенні виконувалося на основі координат 180 дискретних точок, що належали мітці 4. Визначено, що похибка вимірювань кутового положення мітки 4 на основі процедури лінійної апроксимації не перевищує 2'. Цього цілком достатньо для забезпечення виставлення осі чутливості гравіметричної системи з похибкою не більше 5' та вимірювань аномалій прискорення сили тяжіння з похибкою не більше 1мГал [1]. Така похибка вимірювань аномалій прискорення сили тяжіння є гарним показником для гравіметричних систем на рухомій основі. Література: 1. Безвесільна О.М. Авіаційні гравіметричні системи та гравіметри: Монографія. - Житомир: ЖДТУ, 2007. - 604с. 2. Грановский В.А., Сирая Т.Н. Методы обработки экспериментальных данных при измерениях. - Л.: Энергоатомиздат, 1990. - 288с. 3. Метрологія та вимірювальна техніка: Підручник / За редакцією Ε.С. Поліщука. - Львів: Бескид Біт, 2003. - 544с. 7 Комп’ютерна верстка А. Рябко 90627 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюGravimetric system with high-accuracy setting gravimeter sensitivity axis
Автори англійськоюBezvesilna Olena Mykolaivna, Podchashynskyi Yurii Oleksandrovych, Ostapchuk Anna Anatoliivna, Kyrychuk Yurii Volodymyrovych, Tkachenko Svitlana Serhiivna
Назва патенту російськоюГравиметрическая система с высокоточным выставлением оси чувствительности гравиметра
Автори російськоюБезвесильна Елена Николаевна, Подчашинский Юрий Александрович, Остапчук Анна Анатолиевна, Киричук Юрий Владимирович, Ткаченко Светлана Сергеевна
МПК / Мітки
МПК: G01V 7/00
Мітки: виставленням, система, гравіметра, чутливості, гравіметрична, високоточним, осі
Код посилання
<a href="https://ua.patents.su/4-90627-gravimetrichna-sistema-z-visokotochnim-vistavlennyam-osi-chutlivosti-gravimetra.html" target="_blank" rel="follow" title="База патентів України">Гравіметрична система з високоточним виставленням осі чутливості гравіметра</a>
Пристрій для виставлення осі чутливості гравіметричної системи
Номер патенту: 90621
Опубліковано: 11.05.2010
Автори: Подчашинський Юрій Олександрович, Киричук Юрій Володимирович, Безвесільна Олена Миколаївна, Гнатейко Нонна Валентинівна
МПК: G01V 7/00
Мітки: осі, пристрій, системі, гравіметричної, чутливості, виставлення
Формула / Реферат:
Пристрій для виставлення осі чутливості гравіметричної системи, що містить гіростабілізовану платформу (1), на якій закріплений чутливий елемент (2) гравіметричної системи, та бортову цифрову обчислювальнумашину (3) (БЦОМ), вхід якої підключений до виходу чутливого елемента (2) гравіметричної системи, а вихід - до входу керування гіростабілізованої платформи (1), який відрізняється тим, що на корпус чутливого елемента (2) гравіметричної...
Авіаційна гравіметрична система для вимірювань аномалій прискорення сили тяжіння
Номер патенту: 79874
Опубліковано: 25.07.2007
Автори: Безвесільна Олена Миколаївна, Подчашинський Юрій Олександрович
МПК: G01V 7/00
Мітки: тяжіння, гравіметрична, аномалій, система, прискорення, вимірювань, сили, авіаційна
Формула / Реферат:
Авіаційна гравіметрична система для вимірювань аномалій прискорення сили тяжіння, що містить гіроскопічний гравіметр (1), систему визначення навігаційних параметрів (2) та вимірювач висоти (3), які підключені до бортової цифрової обчислювальної машини (БЦОМ) (4), яка відрізняється тим, що гіроскопічний гравіметр (1) містить два триступеневі гіроскопи (8, 9), ротори яких виконані такими, що обертаються в протилежні боки, а їх центри мас...
Тест-система імуноферментна підвищеної чутливості для кількісного визначення антигену р24 вірусу імунодефіциту людини (dia-нiv-р24-sensitive)
Номер патенту: 17184
Опубліковано: 15.09.2006
Автори: Горлов Юрій Іванович, Іванська Наіля Валєєвна, Мельник Анатолій Іванович, Семиноженко Володимир Петрович, Пилипенко Віталій Григорович, Терещенко Михайло Іванович, Трохимчук Тетяна Юріївна, Шевчук Олександр Анатолійович, Грабченко Наталія Іванівна, Троянський Василь Васильович, Ганова Лариса Олександрівна, Мойса Лариса Миколаївна, Михайленко Людмила Петрівна
МПК: A61K 39/12
Мітки: імуноферментна, кількісного, імунодефіциту, визначення, вірусу, dia-нiv-р24-sensitive, чутливості, підвищеної, антигену, тест-система, людини
Формула / Реферат:
Тест-система імуноферментна підвищеної чутливості для кількісного визначення антигену р24 вірусу імунодефіциту людини (DIA-HIV-р24-sensitive), в якій на полістироловий планшет сорбовані антитіла проти ВІЛ-1, а як кон'югат використовують біотинільовані антитіла проти р24 ВІЛ-1 та стрептавідин, зв'язаний з пероксидазою; яка відрізняється тим, що додатково для ампліфікації сигналу в систему додаються біотинтирамін і стрептавідин, мічений...
Спосіб вимірювання аномалій прискорень сили тяжіння
Номер патенту: 45567
Опубліковано: 10.11.2009
Автори: Безвесільна Олена Миколаївна, Гнатенко Нона Валентинівна, Ткаченко Світлана Сергіївна, Киричук Юрій Володимирович
МПК: G01V 7/00
Мітки: прискорень, аномалій, вимірювання, сили, спосіб, тяжіння
Формула / Реферат:
Спосіб вимірювання аномалій прискорень сили тяжіння, що включає вимірювання навігаційних параметрів, значення висоти та питомої сили тяжіння за допомогою гіроскопічного гравіметра, який встановлено на гіростабілізованій платформі, яка під час обертання в просторі приймає таке положення, що напрямок її вертикальної осі збігається з напрямком місцевої вертикалі на основі показань акселерометрів, які входять до її складу, і на основі вхідних...
Тест-система імуноферментна підвищеної чутливості для кількісного визначення поверхневого антигену (hbsag) вірусу гепатиту b (dia-hbsag-sensitive)
Номер патенту: 21168
Опубліковано: 15.03.2007
Автори: Пилипенко Віталій Григорович, Троянський Василь Васильович, Шевчук Олександр Анатолійович, Філененко Ніна Анатоліївна, Горлов Юрій Іванович, Мойса Лариса Миколаївна, Грабченко Наталія Іванівна, Гураль Анатолій Леонтійович, Донська Євгенія Сергіївна, Мельник Анатолій Іванович, Ганова Лариса Олександрівна, Терещенко Михайло Іванович, Іванська Наіля Валєєвна, Семиноженко Володимир Петрович
МПК: A61K 39/21
Мітки: імуноферментна, hbsag, dia-hbsag-sensitive, вірусу, поверхневого, підвищеної, кількісного, антигену, гепатиту, чутливості, визначення, тест-система
Формула / Реферат:
Тест-система імуноферментна підвищеної чутливості для кількісного визначення поверхневого антигену (HBsAg) вірусу гепатиту В (DIA-HBsAg-sensitive), в якій імуносорбент включає моноклональні антитіла проти поверхневого антигену вірусу гепатиту В, а як позитивний контроль застосовують рекомбінантний HBsAg з відомою концентрацією, яка відрізняється тим що, як кон'югат використовують біотинільовані антитіла проти HBsAg та стрептавідин, зв'язаний...
Попередній патент: Спосіб охолодження чушкового чавуну
Наступний патент: Комплексний повітроочисний пристрій газотурбінного двигуна
Випадковий патент: Яблука мочені