Супутникова радіонавігаційна система
Формула / Реферат
Супутникова радіонавігаційна система, що містить орбітальне угруповання навігаційних космічних апаратів (1), контрольно-коригувальну станцію (3), до складу якої входить наземна навігаційна апаратура, з'єднана (4) з опорним приймальним пристроєм (5), який містить формувач диференціальних виправлень (9), з'єднаний з еталонним приймачем навігаційних сигналів (8), та гравіметр (10), які з'єднані з обчислювальним пристроєм (11), α також апаратуру споживача (2), яка включає приймач радіонавігаційних сигналів (16), з’єднаний з частотним детектором (19) та блоком обробки навігаційних сигналів (17), який через блок обробки змін частоти сигналу з'єднаний з еталоном частоти (21), синхронізованим з бортовим джерелом радіовипромінювання яка відрізняється тим, що опорний приймальний пристрій (5) контрольно-коригувальної станції (3) містить додатково частотний детектор (24), вхід якого з'єднаний з виходом додаткового еталона частоти (25), синхронізованого з бортовим джерелом радіовипромінювання, α вихід - з обчислювальним пристроєм (11), який виконаний з можливістю визначення змін частоти прийнятого сигналу щодо еталонного та значень прискорення сили ваги, уточнені дані через формувач диференціальних виправлень (9), блок шифрування диференціальних виправлень (12) та наземну навігаційну апаратуру (4) надходять до апаратури споживача.
Текст
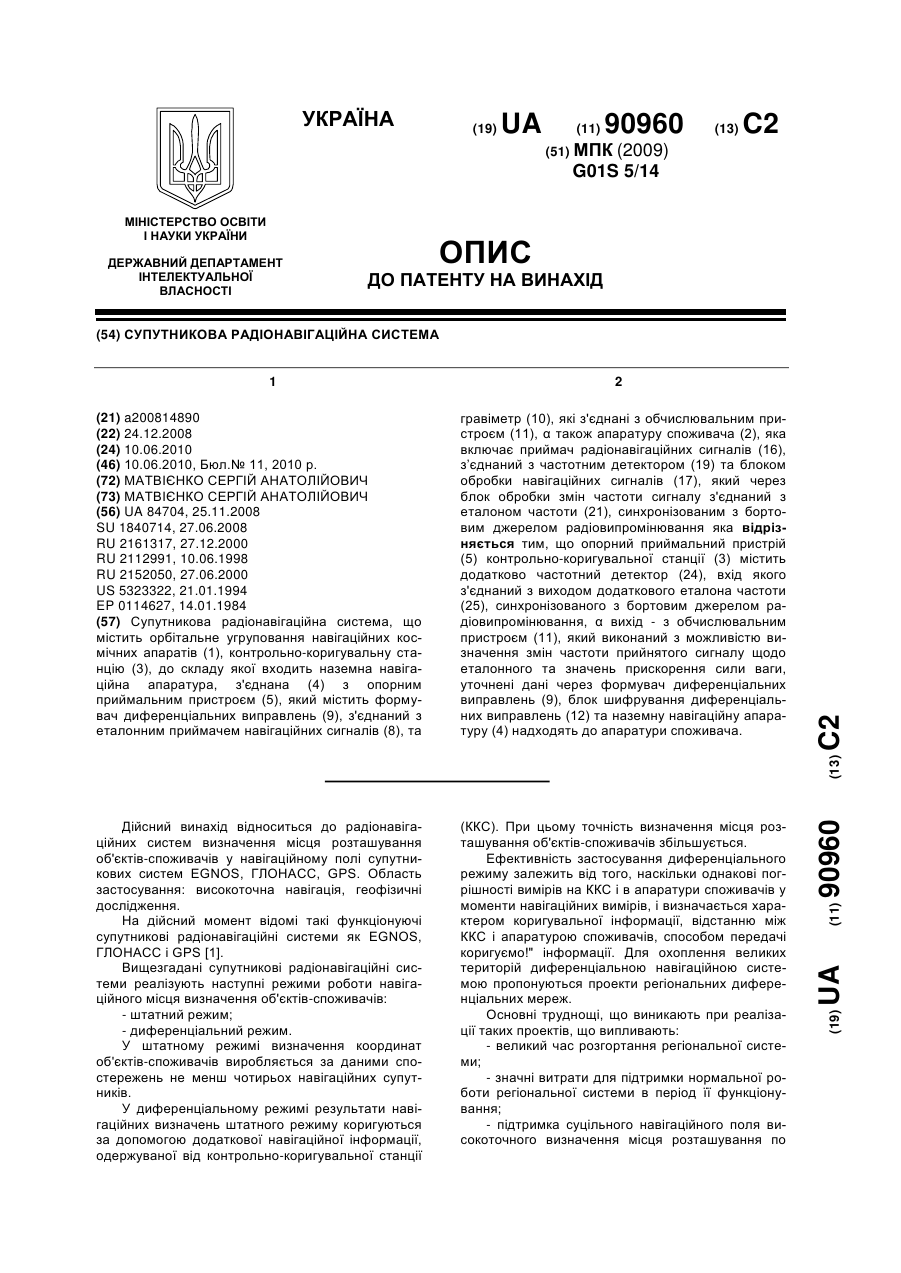
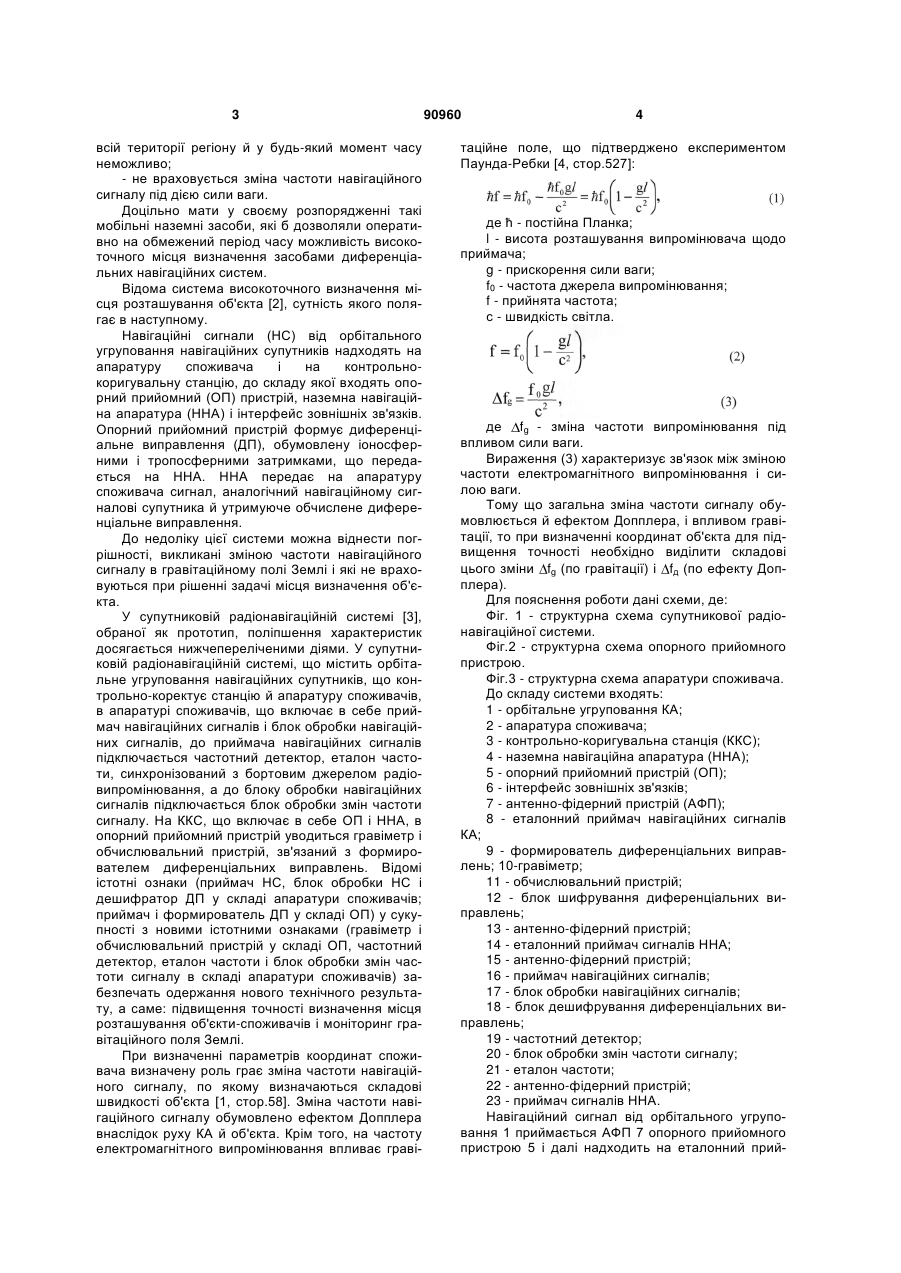
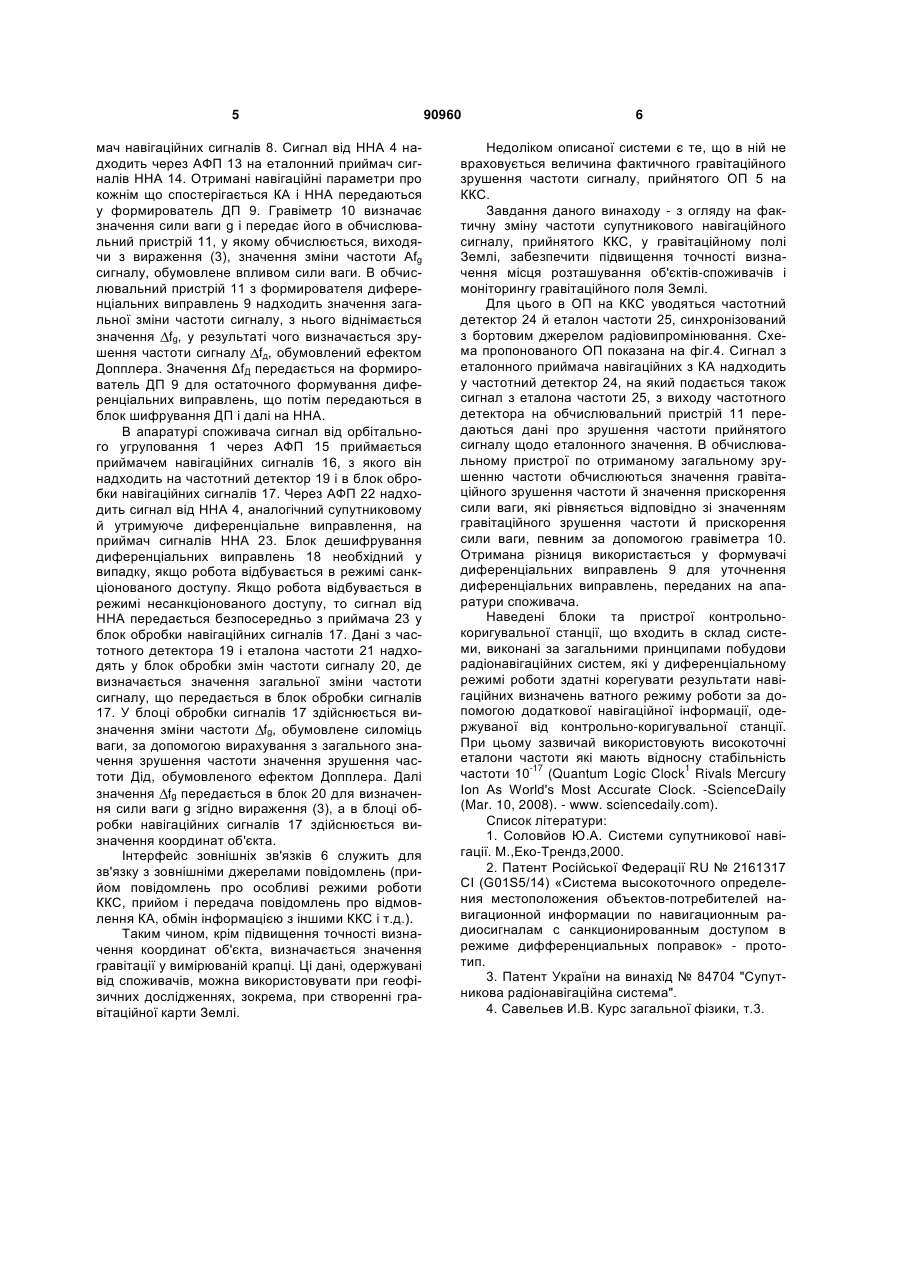
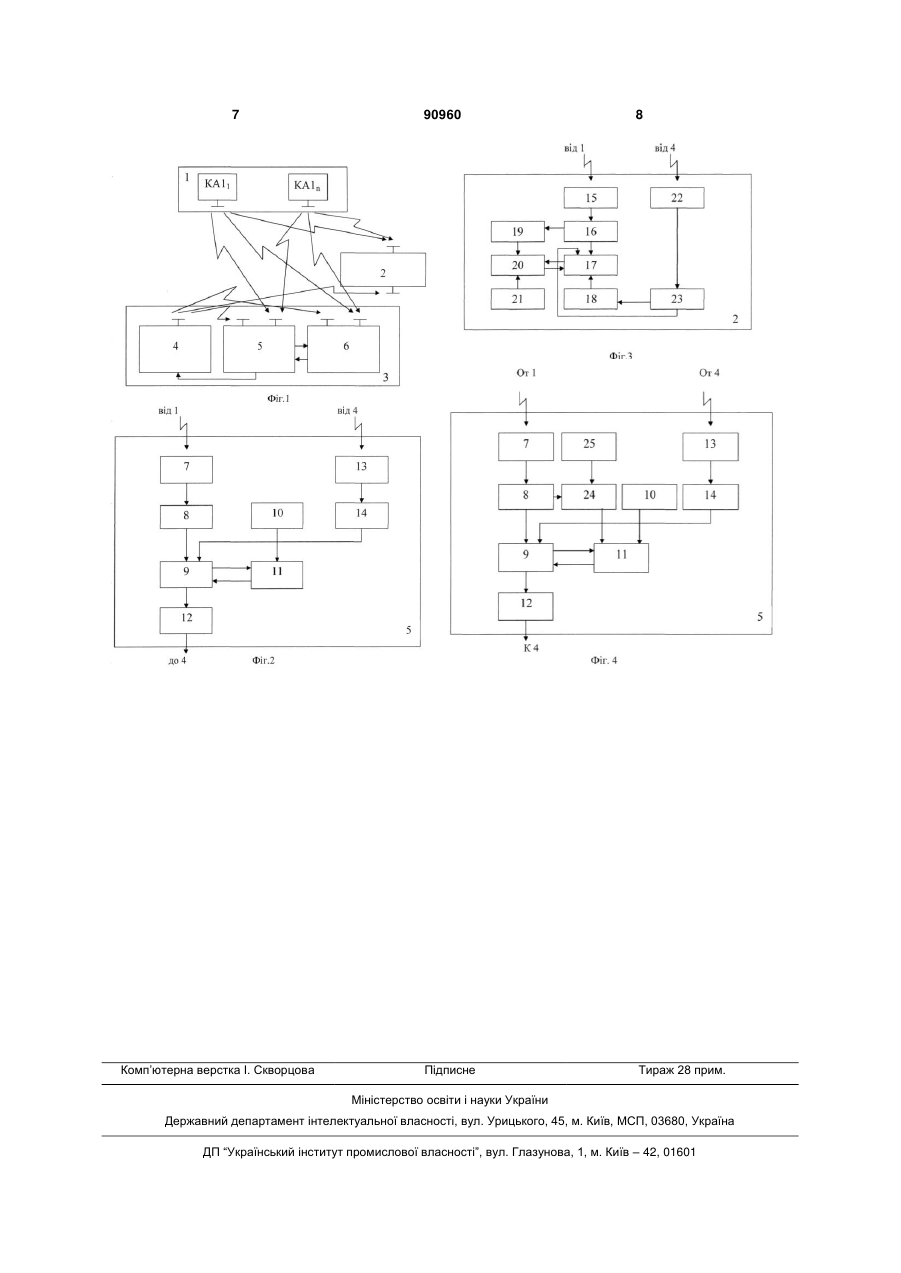
Супутникова радіонавігаційна система, що містить орбітальне угруповання навігаційних космічних апаратів (1), контрольно-коригувальну станцію (3), до складу якої входить наземна навігаційна апаратура, з'єднана (4) з опорним приймальним пристроєм (5), який містить формувач диференціальних виправлень (9), з'єднаний з еталонним приймачем навігаційних сигналів (8), та C2 1 3 всій території регіону й у будь-який момент часу неможливо; - не враховується зміна частоти навігаційного сигналу під дією сили ваги. Доцільно мати у своєму розпорядженні такі мобільні наземні засоби, які б дозволяли оперативно на обмежений період часу можливість високоточного місця визначення засобами диференціальних навігаційних систем. Відома система високоточного визначення місця розташування об'єкта [2], сутність якого полягає в наступному. Навігаційні сигнали (НС) від орбітального угруповання навігаційних супутників надходять на апаратуру споживача і на контрольнокоригувальну станцію, до складу якої входять опорний прийомний (ОП) пристрій, наземна навігаційна апаратура (ННА) і інтерфейс зовнішніх зв'язків. Опорний прийомний пристрій формує диференціальне виправлення (ДП), обумовлену іоносферними і тропосферними затримками, що передається на ННА. ННА передає на апаратуру споживача сигнал, аналогічний навігаційному сигналові супутника й утримуюче обчислене диференціальне виправлення. До недоліку цієї системи можна віднести погрішності, викликані зміною частоти навігаційного сигналу в гравітаційному полі Землі і які не враховуються при рішенні задачі місця визначення об'єкта. У супутниковій радіонавігаційній системі [3], обраної як прототип, поліпшення характеристик досягається нижчепереліченими діями. У супутниковій радіонавігаційній системі, що містить орбітальне угруповання навігаційних супутників, що контрольно-коректує станцію й апаратуру споживачів, в апаратурі споживачів, що включає в себе приймач навігаційних сигналів і блок обробки навігаційних сигналів, до приймача навігаційних сигналів підключається частотний детектор, еталон частоти, синхронізований з бортовим джерелом радіовипромінювання, а до блоку обробки навігаційних сигналів підключається блок обробки змін частоти сигналу. На ККС, що включає в себе ОП і ННА, в опорний прийомний пристрій уводиться гравіметр і обчислювальний пристрій, зв'язаний з формирователем диференціальних виправлень. Відомі істотні ознаки (приймач НС, блок обробки НС і дешифратор ДП у складі апаратури споживачів; приймач і формирователь ДП у складі ОП) у сукупності з новими істотними ознаками (гравіметр і обчислювальний пристрій у складі ОП, частотний детектор, еталон частоти і блок обробки змін частоти сигналу в складі апаратури споживачів) забезпечать одержання нового технічного результату, а саме: підвищення точності визначення місця розташування об'єкти-споживачів і моніторинг гравітаційного поля Землі. При визначенні параметрів координат споживача визначену роль грає зміна частоти навігаційного сигналу, по якому визначаються складові швидкості об'єкта [1, стор.58]. Зміна частоти навігаційного сигналу обумовлено ефектом Допплера внаслідок руху КА й об'єкта. Крім того, на частоту електромагнітного випромінювання впливає граві 90960 4 таційне поле, що підтверджено експериментом Паунда-Ребки [4, стор.527]: де ħ - постійна Планка; l - висота розташування випромінювача щодо приймача; g - прискорення сили ваги; f0 - частота джерела випромінювання; f - прийнята частота; с - швидкість світла. де fg - зміна частоти випромінювання під впливом сили ваги. Вираження (3) характеризує зв'язок між зміною частоти електромагнітного випромінювання і силою ваги. Тому що загальна зміна частоти сигналу обумовлюється й ефектом Допплера, і впливом гравітації, то при визначенні координат об'єкта для підвищення точності необхідно виділити складові цього зміни fg (по гравітації) і fд (по ефекту Допплера). Для пояснення роботи дані схеми, де: Фіг. 1 - структурна схема супутникової радіонавігаційної системи. Фіг.2 - структурна схема опорного прийомного пристрою. Фіг.3 - структурна схема апаратури споживача. До складу системи входять: 1 - орбітальне угруповання КА; 2 - апаратура споживача; 3 - контрольно-коригувальна станція (ККС); 4 - наземна навігаційна апаратура (ННА); 5 - опорний прийомний пристрій (ОП); 6 - інтерфейс зовнішніх зв'язків; 7 - антенно-фідерний пристрій (АФП); 8 - еталонний приймач навігаційних сигналів КА; 9 - формирователь диференціальних виправлень; 10-гравіметр; 11 - обчислювальний пристрій; 12 - блок шифрування диференціальних виправлень; 13 - антенно-фідерний пристрій; 14 - еталонний приймач сигналів ННА; 15 - антенно-фідерний пристрій; 16 - приймач навігаційних сигналів; 17 - блок обробки навігаційних сигналів; 18 - блок дешифрування диференціальних виправлень; 19 - частотний детектор; 20 - блок обробки змін частоти сигналу; 21 - еталон частоти; 22 - антенно-фідерний пристрій; 23 - приймач сигналів ННА. Навігаційний сигнал від орбітального угруповання 1 приймається АФП 7 опорного прийомного пристрою 5 і далі надходить на еталонний прий 5 мач навігаційних сигналів 8. Сигнал від ННА 4 надходить через АФП 13 на еталонний приймач сигналів ННА 14. Отримані навігаційні параметри про кожнім що спостерігається КА і ННА передаються у формирователь ДП 9. Гравіметр 10 визначає значення сили ваги g і передає його в обчислювальний пристрій 11, у якому обчислюється, виходячи з вираження (3), значення зміни частоти Afg сигналу, обумовлене впливом сили ваги. В обчислювальний пристрій 11 з формирователя диференціальних виправлень 9 надходить значення загальної зміни частоти сигналу, з нього віднімається значення fg, у результаті чого визначається зрушення частоти сигналу fд, обумовлений ефектом Допплера. Значення ΔfД передається на формирователь ДП 9 для остаточного формування диференціальних виправлень, що потім передаються в блок шифрування ДП і далі на ННА. В апаратурі споживача сигнал від орбітального угруповання 1 через АФП 15 приймається приймачем навігаційних сигналів 16, з якого він надходить на частотний детектор 19 і в блок обробки навігаційних сигналів 17. Через АФП 22 надходить сигнал від ННА 4, аналогічний супутниковому й утримуюче диференціальне виправлення, на приймач сигналів ННА 23. Блок дешифрування диференціальних виправлень 18 необхідний у випадку, якщо робота відбувається в режимі санкціонованого доступу. Якщо робота відбувається в режимі несанкціонованого доступу, то сигнал від ННА передається безпосередньо з приймача 23 у блок обробки навігаційних сигналів 17. Дані з частотного детектора 19 і еталона частоти 21 надходять у блок обробки змін частоти сигналу 20, де визначається значення загальної зміни частоти сигналу, що передається в блок обробки сигналів 17. У блоці обробки сигналів 17 здійснюється визначення зміни частоти fg, обумовлене силоміць ваги, за допомогою вирахування з загального значення зрушення частоти значення зрушення частоти Дід, обумовленого ефектом Допплера. Далі значення fg передається в блок 20 для визначення сили ваги g згідно вираження (3), а в блоці обробки навігаційних сигналів 17 здійснюється визначення координат об'єкта. Інтерфейс зовнішніх зв'язків 6 служить для зв'язку з зовнішніми джерелами повідомлень (прийом повідомлень про особливі режими роботи ККС, прийом і передача повідомлень про відмовлення КА, обмін інформацією з іншими ККС і т.д.). Таким чином, крім підвищення точності визначення координат об'єкта, визначається значення гравітації у вимірюваній крапці. Ці дані, одержувані від споживачів, можна використовувати при геофізичних дослідженнях, зокрема, при створенні гравітаційної карти Землі. 90960 6 Недоліком описаної системи є те, що в ній не враховується величина фактичного гравітаційного зрушення частоти сигналу, прийнятого ОП 5 на ККС. Завдання даного винаходу - з огляду на фактичну зміну частоти супутникового навігаційного сигналу, прийнятого ККС, у гравітаційному полі Землі, забезпечити підвищення точності визначення місця розташування об'єктів-споживачів і моніторингу гравітаційного поля Землі. Для цього в ОП на ККС уводяться частотний детектор 24 й еталон частоти 25, синхронізований з бортовим джерелом радіовипромінювання. Схема пропонованого ОП показана на фіг.4. Сигнал з еталонного приймача навігаційних з КА надходить у частотний детектор 24, на який подається також сигнал з еталона частоти 25, з виходу частотного детектора на обчислювальний пристрій 11 передаються дані про зрушення частоти прийнятого сигналу щодо еталонного значення. В обчислювальному пристрої по отриманому загальному зрушенню частоти обчислюються значення гравітаційного зрушення частоти й значення прискорення сили ваги, які рівняється відповідно зі значенням гравітаційного зрушення частоти й прискорення сили ваги, певним за допомогою гравіметра 10. Отримана різниця використається у формувачі диференціальних виправлень 9 для уточнення диференціальних виправлень, переданих на апаратури споживача. Наведені блоки та пристрої контрольнокоригувальної станції, що входить в склад системи, виконаніза загальними принципами побудови радіонавігаційних систем, які у диференціальному режимі роботи здатні корегувати результати навігаційних визначень ватного режиму роботи за допомогою додаткової навігаційної інформації, одержуваної від контрольно-коригувальної станції. При цьому зазвичай використовують високоточні еталони частоти які мають відносну стабільність -17 1 частоти 10 (Quantum Logic Clock Rivals Mercury Ion Аs World's Most Accurate Clock. -ScienceDaily (Mar. 10, 2008). - www. sciencedaily.com). Список літератури: 1. Соловйов Ю.А. Системи супутникової навігації. М.,Еко-Трендз,2000. 2. Патент Російської Федерації RU № 2161317 СІ (G01S5/14) «Система высокоточного определения местоположения объектов-потребителей навигационной информации по навигационным радиосигналам с санкционированным доступом в режиме дифференциальных поправок» - прототип. 3. Патент України на винахід № 84704 "Супутникова радіонавігаційна система". 4. Савельев И.В. Курс загальної фізики, т.3. 7 Комп’ютерна верстка І. Скворцова 90960 8 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSatellite radio-navigation system
Автори англійськоюMatvienko Serhii Anatoliiovych
Назва патенту російськоюСпутниковая радионавигационная система
Автори російськоюМатвиенко Сергей Анатольевич
МПК / Мітки
МПК: G01S 5/14
Мітки: радіонавігаційна, система, супутникова
Код посилання
<a href="https://ua.patents.su/4-90960-suputnikova-radionavigacijjna-sistema.html" target="_blank" rel="follow" title="База патентів України">Супутникова радіонавігаційна система</a>
Супутникова радіонавігаційна система

Номер патенту: 84704
Опубліковано: 25.11.2008
Автор: Матвієнко Сергій Анатолійович
МПК: G01S 5/14
Мітки: система, супутникова, радіонавігаційна
Формула / Реферат:
Супутникова радіонавігаційна система, що містить орбітальне угруповання навігаційних космічних апаратів, контрольно-коригувальну станцію, що містить наземну навігаційну апаратуру й опорний приймальний пристрій, що містить формувач диференціальних виправлень, і апаратуру споживача, що включає приймач радіонавігаційних сигналів і блок обробки навігаційних сигналів, яка відрізняється тим, що до приймача навігаційних сигналів підключений...
Радіонавігаційна система
Номер патенту: 28443
Опубліковано: 10.12.2007
Автори: Блаженний Валерій Іванович, Слєпов Лев Іванович, Якобінчук Олександр Вікторович, Куровська Тетяна Юріївна
МПК: G01S 3/00
Мітки: система, радіонавігаційна
Формула / Реферат:
Радіонавігаційна система, що містить приводну радіостанцію, встановлену на аеродромі, приймач радіонавігаційних сигналів, при цьому приймач радіонавігаційних сигналів встановлено на рухомий об'єкт, яка відрізняється тим, що додатково містить три або більше базових станцій стільникового зв'язку, приймач радіосигналів від базових станцій стільникового зв'язку, при цьому приймач радіосигналів від базових станцій стільникового зв'язку встановлено...
Локальна радіонавігаційна система

Номер патенту: 68960
Опубліковано: 16.08.2004
Автори: Савченко Віталій Анатолійович, Машков Олег Альбертович, Мосов Сергій Петрович, Кравченко Юрій Васильович
МПК: G01S 5/02
Мітки: система, локальна, радіонавігаційна
Формула / Реферат:
Локальна радіонавігаційна система, що містить сукупність приймачів радіонавігаційних сигналів від глобальної навігаційної супутникової системи, встановлених на рухомих об'єктах, мережу випромінювачів радіонавігаційних сигналів, встановлених на навігаційних космічних апаратах та один або декілька стаціонарних наземних випромінювачів, яка відрізняється тим, що система додатково містить мережу випромінювачів радіонавігаційних сигналів,...
Система для визначення координат та швидкості рухомого об’єкта
Номер патенту: 69200
Опубліковано: 16.08.2004
Автори: Машков Олег Альбертович, Мосов Сергій Петрович, Кравченко Юрій Васильович, Савченко Віталій Анатолійович
МПК: G01S 5/02
Мітки: швидкості, рухомого, визначення, об'єкта, система, координат
Формула / Реферат:
Система для визначення координат та швидкості рухомого об'єкта, що містить приймач радіонавігаційних сигналів, встановлений на рухомому об'єкті, та мережу випромінювачів радіонавігаційних сигналів, встановлених на навігаційних космічних апаратах, яка відрізняється тим, що система додатково містить радіонавігаційну станцію, встановлену на літальному апараті, яка включає приймач, блок обробки та випромінювач радіонавігаційних сигналів.
Спосіб роботи з супутниковою системою зв’язку та супутникова система зв’язку.
Номер патенту: 44777
Опубліковано: 15.03.2002
Автори: Відман Роберт А., Сайтс Майкл Дж., Монті Пол А.
МПК: H04Q 7/38
Мітки: зв'язку, супутникова, роботи, супутниковою, системою, система, спосіб
Формула / Реферат:
1. Спосіб роботи з супутниковою системою зв'язку, в якому встановлюють безпровідний зв'язок з абонентом від міжмережного інтерфейсу, сполученого з абонентом, через щонайменше один супутник каналами прямого і зворотного зв'язків, який відрізняється тим, що періодично визначають у міжмережному інтерфейсі протягом сеансу зв'язку кількість ресурсів супутникової системи, що використовуються для підтримання безпровідного зв'язку з абонентом; і...
Попередній патент: Очисник головок коренеплодів
Наступний патент: Радіофізичний гравіметр
Випадковий патент: Логічний модуль