Пристрій визначення складу групової цілі
Номер патенту: 9503
Опубліковано: 17.10.2005
Автори: Тимчук Володимир Юрійович, Бондаренко Борис Федорович
Формула / Реферат
1. Пристрій визначення складу групової цілі, що включає цифрову лінійну антенну решітку (ЦЛАР) для прийому енергії відбитих від об'єктів сигналів і їх перетворення з виходів приймальних каналів у цифрову форму, блок здійснення операцій над радіолокаційним сигналом (блок перемноження вихідних сигналів ЦЛАР на оціночний вектор), блок обчислення квадратичної форми результату перемноження, блок порівняння квадратичної форми з заданим порогом для прийняття рішення про кількість цілей, який відрізняється тим, що блок здійснення операцій над радіолокаційним сигналом містить матричні фільтри-проектори, передаточні функції яких перенастроюються, ці матричні фільтри-проектори за своєю вимірністю узгоджуються з можливою кількістю об'єктів групової цілі, тобто кількість стовпчиків відповідає передбачуваному складові групової цілі, причому кожен з цих стовпчиків настроюється на кутову координату "свого" об'єкта зі складу групової цілі.
2. Пристрій за п. 1, який відрізняється тим, що містить блок порівняння значень квадратичних форм з двох каналів матричних фільтрів-проекторів і визначення матричного фільтра-проектора, який дає більше значення квадратичної форми, а також блок встановлення складу групової цілі на основі визначеної вимірності цього проектора.
3. Пристрій за пп. 1, 2, який відрізняється тим, що містить цифрову лінію затримки, а також тим, що кожен зі стовпчиків матричних фільтрів-проекторів настроюється на частоту Доплера "свого" об'єкта зі складу групової цілі.
Текст
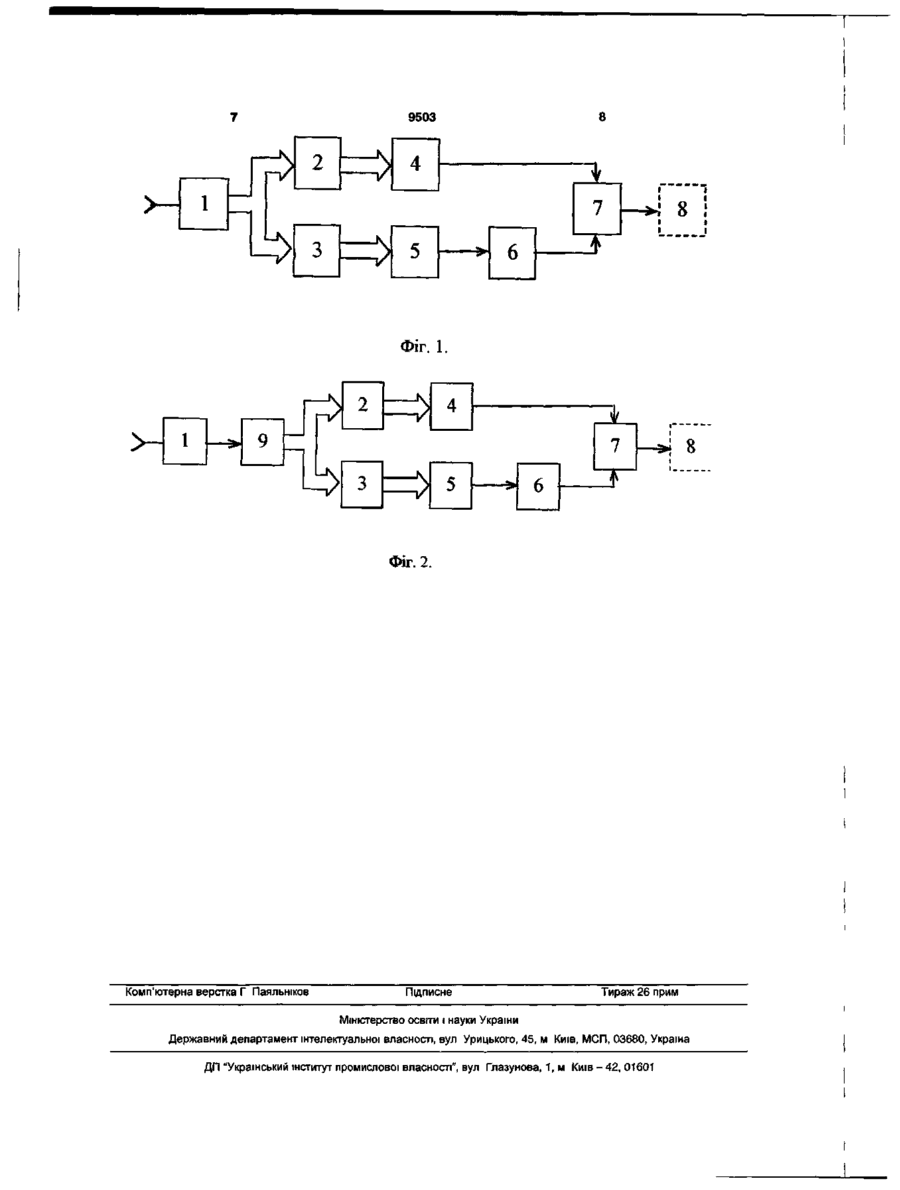
1 Пристрій визначення складу групової ЦІЛІ, що включає цифрову лінійну антенну решітку (ЦЛАР) для прийому енергії відбитих від об'єктів сигналів і їх перетворення з виходів приймальних каналів у цифрову форму, блок здійснення операцій над радіолокаційним сигналом (блок перемноження вихідних сигналів ЦЛАР на оціночний вектор), блок обчислення квадратичної форми результату перемноження, блок порівняння квадратичної форми з заданим порогом для прийняття рішення про КІЛЬКІСТЬ цілей, який відрізняється тим, що блок здійснення операцій над радіолокаційним сигналом містить матричні фільтри проектори, передаточні функції яких перенастроюються, ці матричні фільтри-проектори за своєю вимірністю узгоджуються з можливою КІЛЬКІСТЮ об'єктів групової ЦІЛІ, тобто КІЛЬКІСТЬ стовпчиків відповідає передбачуваному складові групової ЦІЛІ, причому кожен з цих стовпчиків настроюється на кутову координату "свого" об'єкта зі складу групової ЦІЛІ 2 Пристрій за п 1, який відрізняється тим, що містить блок порівняння значень квадратичних форм з двох каналів матричних фільтрівпроекторів і визначення матричного фільтрапроектора, який дає більше значення квадратичної форми, а також блок встановлення складу групової ЦІЛІ на основі визначеної вимірності цього проектора 3 Пристрій за пп 1, 2, який відрізняється тим, що містить цифрову ЛІНІЮ затримки, а також тим, що кожен зі стовпчиків матричних фільтрів-проекторів настроюється на частоту Доплера "свого" обєкта зі складу групової ЦІЛІ Корисна модель належить до області радіолокації, зокрема до радіотехнічних пристроїв (РТП) обробки сигналів, які використовуються в РЛС з активним запитом і пасивною ВІДПОВІДДЮ Пристрій забезпечує можливість визначення складу групової ЦІЛІ в імпульсному об'ємі РЛС, коли сигнали від двох і більше цілей є корельованими Є відомим спосіб визначення КІЛЬКОСТІ цілей у групі [RU 2002118429/09, 10 07 2002], який може бути реалізованим у відповідному РТП і полягає в тому, що виконують аналого-цифрове перетворення сигналу, відбитого від цілей, обчислюють комплексні кореляційні суми вибірки прийнятого сигналу і опорних квадратурних сигналів для заданих значень параметра розділення опорних сигналів, визначають максимальні за шириною інтервали значень параметра розділення, всередині яких усі модулі кореляційних сум (локальні максимуми яких визначені) перевищують поріг виявлен понад один, обчислюють ширину інтервалу, всередині якого є один локальний максимум, приймають рішення про ВІДПОВІДНІСТЬ одного локального максимуму двом цілям у випадку, коли ширина інтервалу більше порогової ширини, а у випадку коли ширина інтервалу менше порогової ширини, обчислюють мінімальну квадратичну нев'язку між відліками комплексних кореляційних сум і відліками еталонних кореляційних сум сигналу однієї ЦІЛІ, приймають рішення про ВІДПОВІДНІСТЬ локального максимуму всередині інтервалу параметра розділення одній ЦІЛІ у випадку, коли мінімальна квадратична нев'язка менше за вибраний з урахуванням імовірності прийняття одиночної ЦІЛІ за групову поріг нев'язки, приймають рішення про ВІДПОВІДНІСТЬ локального максимуму двом цілям у випадку, коли мінімальна квадратична нев'язка перевищує поріг нев'язки Основним недоліком способу є втрата його ефективності в умовах корельованих сигналів У якості прототипу винаходу вибрано пристрій, що реалізує класичний алгоритм обробки ня, приймають рішення про ВІДПОВІДНІСТЬ КОЖНОГО локального максимуму одній ЦІЛІ В ТИХ інтервалах, всередині яких КІЛЬКІСТЬ локальних максимумів 00 о ю О) О) 9503 радіолокаційної інформації на вході порогового пристрою виявляча [Ширман Я.Д Теоретические основы радиолокации. - М.: Сов. Радио, 1970. 560 с ] вигляду де цифрою 1 показано, що алгоритм обробки "працює" з однією ціллю; Y - N-вимірний вектор-стовпчик вихідних сигналів приймальних каналів цифрової лінійної антенної решітки (ЦЛАР), коли мова йде про розділення за кутовою координатою, або відведень цифрової лінії затримки (ЦЛЗ), коли мова йде про розділення за швидкістю; N - кількість приймальних елементів ЦЛАР (відведень ЦЛЗ); v0 - N-вимірний вектор-стовпчик очікуваного амплітудно-фазового розподілу (або, іншими словами, на який настроюється антенна решітка), що створюється ціллю на розкритті ЦЛАР (на відведеннях ЦЛЗ); н - символ ермітового транспонування. Пристрій-прототип включає: 1. ЦЛАР для прийому радіолокаційних сигналів, відбитих від цілей; 2. блок формування оціночного вектора; 3. блок здійснення операцій над радіолокаційним сигналом (блок перемноження вихідних сигналів ЦЛАР на оціночний вектор); 4. обчислювач квадратичної форми (ОКФ) отриманого добутку; 5. блок порівнювання квадратичної форми (КФ) з заданим порогом для прийняття рішення про кількість цілей. Основним недоліком прототипу є те, що його застосування для визначення складу групової цілі є неефективним, оскільки обмежуються можливостями РЛС щодо роздільної здатності за будьякою з координат. При цьому застосування у блоці перемноження вихідних сигналів ЦЛАР на оціночний вектор відомих методів високого розділення [Кей СМ., Марплмл С.Л. Современные методы спектрального анализа: обзор // ТИИЭР, 1981. - Т. 69. - №11. - С. 5-51] розширює можливості щодо визначення складу групової цілі, проте у випадку наявності на вході РТП когерентних радіолокаційних сигналів, коли зазначені методи втрачають властивості високого розділення [Бондаренко Б.Ф., Платонов С.Ю., Тимчук В.Ю. Алгоритмы обработки, обеспечивающие высокое разрешение коррелированных сигналов // Радиоэлектроника, 2003. Т. 46, №4. - С. 61-66], ефективність застосування пристрою для визначення складу групової цілі теж є низькою. Технічною задачею корисної моделі є удосконалення прототипу з метою ефективного розділення корельованих радіолокаційних сигналів і наступного визначення складу групової цілі. Технічним результатом корисної моделі є визначення складу групової цілі в імпульсному об'ємі РЛС, що досягається розв'язуваною задачею щодо удосконалення прототипу. Також технічним результатом винаходу є розділення сигналів від об'єктів, які не входять до складу групової цілі, але є корельованими через те, що є порівнянними за розмірами, перебувають на приблизно однаковій дальності від РЛС і рухаються з однаковими радіальними швидкостями. Корисна модель пояснюється: Фіг. 1 , 2 - спрощені структурні схеми варіантів пристрою визначення складу групової цілі в імпульсному об'ємі РЛС. Розв'язання технічної задачі досягається тим, що застосовується пристрій визначення складу групової цілі, що включає такі елементи: 1. Антенну систему 1 РЛС у вигляді багатоканальної ЦЛАР, призначену для прийому і перетворення енергії матеріального об'єкту "електромагнітне поле", відбитого від виявлених цілей, у цифрову форму енергії електричних сигналів (відбитих сигналів) на виходах приймальних каналів решітки. 2. Блоки 2 і 3 здійснення операцій над радіолокаційним сигналом - два перенастроювані матричні фільтри-проектори 2 і 3, які призначені для формування підпросторів очікуваних фазових розподілів [UA 71724A, 16.10.2003 p.] від сигналів групової цілі, що знаходяться в імпульсному об'ємі РЛС, в приймальних елементах ЦЛАР (або на відведеннях ЦЛЗ); матричні фільтри-проектори (МФП) являють собою процесори, що забезпечують можливість формування матриці (проектора), причому МФП 2 у процесі операцій над сигналом відрізняється від МФП 3 лише вимірністю (на одиницю); вимірності проекторів у свою чергу говорять про ймовірну кількість цілей у складі групової цілі. 3. Обчислювачі 4 і 5 квадратичної форми (квадрата норми) для сигналів на виходах МФП з подальшим знаходженням максимуму КФ, які являють собою спеціалізовані процесори, що забезпечують можливості обчислення добутку матриці на вектор і обчислення квадрату норми вектора і розв'язання задачі пошуку безумовного екстремуму. 4. Блок 6, що здійснює перемноження значення КФ одного з МФП на ваговий коефіцієнт к о Y H РГ М _Ї Y Значення вагового коефіцієнту ко
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for determining the composition of a multiple target
Назва патенту російськоюУстройство для определения состава групповой цели
МПК / Мітки
МПК: G01S 13/52
Мітки: цілі, складу, визначення, групової, пристрій
Код посилання
<a href="https://ua.patents.su/4-9503-pristrijj-viznachennya-skladu-grupovo-cili.html" target="_blank" rel="follow" title="База патентів України">Пристрій визначення складу групової цілі</a>
Пристрій для визначення радіальної швидкості цілі
Номер патенту: 37869
Опубліковано: 15.09.2003
Автори: Немчин Олександр Федорович, КУКОЛЬНИЦЬКИЙ АНАТОЛІЙ ПИЛИПОВИЧ, Падалко Віктор Григорович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Каспирович Олександр Геннадійович, Мокеєв Юрій Геннадійович, Мирошниченко Михайло Іванович, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ
МПК: G01S 13/00, G01S 13/524, G01S 7/00
Мітки: визначення, радіальної, швидкості, пристрій, цілі
Формула / Реферат:
Пристрій для визначення радіальної швидкості цілі, який містить гребінку з q доплерівських фільтрів, схему АБО, який відрізняється тим, що містить q порогових схем, блок вибору номера фільтра з інформаційним виходом та допоміжним виходом максимальної амплітуди, основний та допоміжний комутатори, суматор, віднімач, m блоків множення на постійний коефіцієнт, m основних схем порівняння, m допоміжних схем порівняння, дешифратор коду фазового...
Радіолокаційний пристрій для визначення дальності та швидкості цілі
Номер патенту: 3925
Опубліковано: 27.12.1994
Автори: Шермаревич Владлен Георгієвич, Кравцов Володимир Геннадєвич, Гегечкорі Сергій Олексійович, Невгасимий Олександр Федорович, Гладиш Фелікс Леонідович
МПК: G01S 13/00
Мітки: швидкості, цілі, пристрій, дальності, радіолокаційний, визначення
Формула / Реферат:
Радиолокационное устройство для определения дальности и скорости цели, содержащее смеситель, первый выход которого является сигнальным входом устройства, вычислитель дальности и скорости цели, выход которого является выходом устройства, отличающееся тем, что введены К гетеродинов, где К= 2, 3,....коммутатор. К сигнальных входов которого соединены с выходами К гетеродинов соответственно, а выход коммутатора подключен к второму входу смесителя,...
Пристрій для поодинокої та групової подачі виробів
Номер патенту: 52108
Опубліковано: 16.12.2002
Автори: Борисовер Марк Борисович, Бірюк Сергій Борисович, Гінзбург Аркадій Львович, Горощук Олександр Васильович, Бейліс Валентин Павлович
МПК: B65B 43/42
Мітки: пристрій, групової, подачі, виробів, поодинокої
Формула / Реферат:
1. Пристрій для поодинокої та групової подачі виробів, який містить основу, подавальний механізм, що містить каретку з штовхачем і привід, який відрізняється тим, що основу виконано у вигляді столу з бортиками вздовж двох боків, каретку виконано у вигляді втулки, насадженої на привід, який виконано у вигляді з'єднаного з двигуном гвинта, довжиною не меншою за довжину основи, гвинт розміщено вздовж довгого боку основи, з двох боків гвинта...
Пристрій для поодинокої та групової подачі виробів
Номер патенту: 49239
Опубліковано: 16.09.2002
Автори: Гінзбург Аркадій Львович, Бейліс Валентин Павлович, Борисовер Марк Борисович, Горощук Олександр Васильович, Бірюк Сергій Борисович
МПК: B07C 1/00
Мітки: поодинокої, виробів, пристрій, групової, подачі
Формула / Реферат:
1. Пристрій для поодинокої та групової подачі виробів, який містить в собі гвинтовий конвеєр, виконаний у вигляді шнеків з однаковою відстанню гвинтової лінії на їх поверхні, та привід, який відрізняється тим, що шнеків виконано два і обидва вони розміщені всередині коробчастої касети, причому касета виконана за формою внутрішньої порожнини у будь-якому поперечному перерізі подібною до виробу, за поперечними розмірами більшою за нього, а за...
Спосіб виміру кута місця цілі

Номер патенту: 32191
Опубліковано: 15.12.2000
Автори: Пророшин Сергій Михайлович, Бахвалов Валентин Борисович, Кудрик Андрій Миколайович
МПК: G01S 17/00
Мітки: кута, місця, спосіб, цілі, виміру
Текст:
...або шляхом електричного сканування діаграми спрямування антени в робочому кутомісцевому секторі радіолокатора. Спосіб-прототип полягає у виконанні таких операцій: періодичне хитання антени (або діаграми спрямування антени) у вертикальній площині розташування цілі в заданому кутомісцевому секторі; випромшення періодичних зондуючих радіоімпульсів на несучій частоті мікрохвильового діапазону; періодичне переключення антени з передачі...
Попередній патент: Композиція для виробництва емульгованого м’ясного продукту
Наступний патент: Спосіб вироблення електроенергії за рахунок конвекції (варіанти)
Випадковий патент: Пересувний генератор інертних газів