Маніпулятор для закриття (відкриття) кришок первинних контейнерів з радіоактивними відходами
Номер патенту: 9562
Опубліковано: 17.10.2005
Автори: Бланар Олег Володимирович, Рафалович Михайло Григорович, Кондратенко Віктор Васильович



Формула / Реферат
1. Маніпулятор для закриття (відкриття) кришок первинних контейнерів з радіоактивними відходами, що містить механізм піднімання і опускання, захват кришки первинного контейнера, гайковерт для фіксації кришки на первинному контейнері, який відрізняється тим, що пальці жорстко з'єднані з планшайбою посаджені в отвори .рухомої плити з зазором.
2. Маніпулятор за п. 1, який відрізняється тим, що планшайба з патроном установлені в обичайці з зазором на пружинах.
Текст
1. Маніпулятор для закриття (відкриття) кришок первинних контейнерів з радіоактивними відходами, що містить механізм піднімання і опускання, захват кришки первинного контейнера, гайковерт для фіксації кришки на первинному контейнері, який відрізняється тим, що пальці жорстко з'єднані з планшайбою посаджені в отвори рухомої плити з зазором. 2. Маніпулятор за п. 1, який відрізняється тим, що планшайба з патроном установлені в обичайці з зазором на пружинах. Корисна модель відноситься до ядерної техніки, а саме, до устаткування для автоматичного закриття (відкриття) кришок первинних контейнерів з радіоактивними відходами. Найбільш близьким рішенням по технічній суті є пристрій фірми FRAMATOME ANP (Франція), який містить механізм піднімання і опускання, захват кришки первинного контейнера, гайковерт для фіксації кришки на первинному контейнері. Недоліком відомого маніпулятора є жорстка система утримання кришки і високі вимоги до позиціонування маніпулятора відносно касети з кришками при захваті кришки. Вказаний недолік виключає можливість використовування пристрою фірми FRAMATOME ANP для роботи з високоактивними відходами (ВАВ) і радіоактивними відходами (РАВ). Завданням заявленої корисної моделі є створення маніпулятора, яким комплектуються робототехнічні комплекси дистанційного управління для закриття (відкриття) кришок первинних контейнерів с ВАВ або РАВ, що виключає дію високоактивних і радіоактивних речовин на обслуговуючий персонал. Технічний результат полягає в тому, що конструкція пристрою забезпечує можливість закриття кришкою первинного контейнера, який містить ВАВ або РАВ, дистанційно без участі людини. Створення маніпулятора забезпечує безпечні умови праці в зоні підвищеної радіації. Маніпулятор для закриття (відкриття) кришок первинних контейнерів з радіоактивними відходами містить нерухому плиту 1; рухому плиту 2; механізм піднімання і опускання рухомої плити, який складається з ходових гвинтів 3, гайок 4, що мають пази 18 за допомогою яких обертання гайок передається від корпусів гайок 5 штифтами 16; привід обертання гайок, що розміщений на нерухомій плиті 1; патрон з само центруванням, який нерухомо з'єднаний з планшайбою 8 за допомогою пальців 32, які посаджені з зазором в рухомій плиті 2; обичайки 9, в якій розміщена планшайба 8 з зазором з допомогою пружин 33; захвати 10, на яких змонтовані призми 21, що захватують кришку 17 первинного контейнера; привод патрона з само центруванням 11; гайковерт для фіксації кришки на первинному контейнері 12; привід відводу гайковерта 13 який рухається по направляючим колонкам 14; пружини 15 подачі гайковерта, флажок 19, вимикачі 20, установлені на нерухомій плиті 1; кінцевий вимикач 22; флажок 23, установлений на рухомій плиті 2; вимикачі 24, установлені на нерухомій плиті 1; флажок 25, установлений на одному з захватів кришки; вимикачі 26 установлені на рухомій плиті 2; важіль 27 привода 13 відводу гайковерта 12; вимикачі 28 та 29, які обмежують крайні положення гайковерта. Корисна модель пояснюється кресленнями: Фіг.1 - загальний вигляд маніпулятора для закривання (відкривання) кришок первинних контейнерів з радіоактивними відходами, Фіг.2 - загальний вигляд (вид А), CM (О ю О) о> 9562 Фіг.З - загальний вигляд (вид Б), Фіг.4 - загальний вигляд (вид В), Фіг.5 - загальний вигляд ( переріз Г-Г) Фіг.6 - загальний вигляд (вид Д), Фіг.7 - загальний вигляд (вид Е). Робота маніпулятора здійснюється таким чином. Ввімкненням приводу 6 приводяться в обертання корпуси гайок 5, які через штифти 16 обертають гайки 4, при цьому ходові гвинти 3 разом з рухомою плитою 2 опускаються до доторкання захватами 10 до кришки 17, яка перешкоджає подальшому опусканню плити 2, гайки 5, продовжуючи обертатись, піднімаються вверх по пазах 18 відносно штифтів 16. Піднімаючись вверх одна з гайок 4 діє на важіль 19, який перекриває шляхові вимикачі 20 привід вимикається. Після цього вмикається привід 11 патрона з само центруванням 7 захвати 10 зводяться, затискаючи кришку 17, затискання кришки здійснюється до дії призм 21 на кінцевий вимикач 22, який вимикає привід 11. Далі здійснюється піднімання рухомої плити 2 разом з планшайбою 8, патроном 7 і кришкою 17 до замикання флажком 23 датчиків (шляхових вимикачів) 24 привід 6 вимикається. Після переміщення маніпулятора на позицію закривання первинного контейнера виконується накладання кришки на первинний контейнер, при дотику кришки до первинного контейнера, подальше опускання рухомої плити 2 стає неможливим, а гайки 4 продовжують обертатись і піднімаються вверх по ходових гвинтах 3, діють на важіль 19, який перекриває датчики 20 привід 6 вимикається. Потім вмикається привід 11 - відбувається затискання кришки 17 3 5 4 3 1 г 6 на первинному контейнері. Затискання здійснюється до перекривання флажком 25 датчиків (шляхових вимикачів) 26 привід 11 вимикається. Після цього включається привід 13, що відводить важіль до перекриття ним датчика 28, що відключає привід 13, при цьому кронштейн із гайковертом 12 під впливом пружин 15 по направляючих колонках 14 переміщається до зіткнення з гвинтом фіксації кришки на первинному контейнері. Після досягнення необхідного обертального моменту затягування гвинта, гайковерт відключається і привід 13 важелем 27 відводить кронштейн із гайковертом у вихідне положення, тобто до перекриття важелем 27 датчиків 29 - привід 13 відключається. Потім відбувається відвід захватів 10 від кришки до перекриття флажком 25 датчиків ЗО привід 11 відключається, призми 21 під дією пружин 31 повертаються у вихідне положення, розімкнувши кінцеві вимикачі 22. Відкривання кришки здійснюється в зворотному закриванню порядку. Для компенсації неточності позиціонування первинного контейнера і маніпулятора з кришкою, планшайба 8 з патроном 7, що само центрується, встановлені на пальцях 32 з зазором на рухомій плиті 2 і пружинах 33 в обичайці 9, а також з зазором S між плитою 2 і планшайбою 8 і зазором S1 між обичайкою 9 і планшайбою 8. Управління маніпулятором здійснюється по жорсткій програмі. Джерело інформації: Каталог фірми FRAMATOME ANP вип. 05.2001р. (прототип) 13 Фіг. 2 8562 32 8 г 7 "Ьг 8 7 ±1 Х/1////Х//Л//У////ЛУ7Л Комп'ютерна верстка М. Мацело Підписне Тираж 26 прим. Міністерство освіти і науки України ний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул Глазунова, 1, м. Київ - 4 2 , 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюManipulator for opening and closing the covers of containers with radioactive waste
Автори англійськоюBlanar Oleh Volodymyrovych
Назва патенту російськоюМанипулятор для открывания и закрывания крышек контейнеров с радиоактивными отходами
Автори російськоюБланар Олег Владимирович
МПК / Мітки
МПК: G21F 5/00
Мітки: відкриття, кришок, радіоактивними, відходами, первинних, закриття, маніпулятор, контейнерів
Код посилання
<a href="https://ua.patents.su/4-9562-manipulyator-dlya-zakrittya-vidkrittya-krishok-pervinnikh-kontejjneriv-z-radioaktivnimi-vidkhodami.html" target="_blank" rel="follow" title="База патентів України">Маніпулятор для закриття (відкриття) кришок первинних контейнерів з радіоактивними відходами</a>
Автоматизований робототехнічний комплекс дистанційного керування для закриття (відкриття) кришок первинних контейнерів з радіоактивними відходами
Номер патенту: 7711
Опубліковано: 15.07.2005
Автори: Кондратенко Віктор Васильович, Рафалович Михайло Григорович, Бланар Олег Володимирович, Зубко Микола Олексійович
МПК: G21F 5/005
Мітки: робототехнічний, кришок, комплекс, контейнерів, керування, закриття, відходами, відкриття, дистанційного, первинних, автоматизований, радіоактивними
Формула / Реферат:
1. Автоматичний робототехнічний комплекс дистанційного керування для закриття (відкриття) кришок первинних контейнерів з радіоактивними відходами, що містить транспортну магістраль, транспортний візок, піддон з первинними контейнерами, кроковий підйомник, касету з кришками, маніпулятор, що містить, в тому числі, гайки в корпусах, механізм переміщення маніпулятора, який відрізняється тим, що гайки, які подають рухому частину маніпулятора з...
Сховище для контейнерів з радіоактивними відходами
Номер патенту: 43500
Опубліковано: 17.12.2001
Автори: Ніконов Альберт Васильович, Власов Анатолій Петрович, Животенко Олексій Миколайович, Тягунов Ігор Михайлович, Коваленко Михайло Васильович
МПК: G21F 9/34
Мітки: сховище, відходами, контейнерів, радіоактивними
Формула / Реферат:
1. Сховище для контейнерів з радіоактивними відходами, яке виконане у вигляді споруди, яка має камеру для зберігання контейнерів, відсік для їх обслуговування та транспортну систему, яке відрізняється тим, що транспортна система виконана у вигляді вагонеток, з'єднаних послідовно в єдиний ланцюг і встановлених на рейковій колії, при цьому кожна з вагонеток обладнана стелажем з кількома вертикальними секціями для контейнерів, а рейкова колія...
Спосіб визначення активності тритію в контейнері з радіоактивними відходами
Номер патенту: 57136
Опубліковано: 16.06.2003
Автори: Бюжон Філіп, Девілар Дідьє, Баше Бернар
МПК: G21F 9/02, G01T 1/167
Мітки: спосіб, радіоактивними, активності, відходами, тритію, контейнері, визначення
Формула / Реферат:
1. Спосіб визначення активності тритію в контейнері (1) з радіоактивними відходами, який містить деяку кількість радіоактивних відходів (2) і має вільний об’єм, який відрізняється тим, що він включає визначення кількості 3He, який утворюється в результаті розпаду тритію, що міститься в радіоактивних відходах (2), протягом певного періоду часу і обчислення на основі цих даних активності тритію, який міститься в радіоактивних відходах...
Маніпулятор

Номер патенту: 50260
Опубліковано: 15.10.2002
Автори: Вігдергауз Леонід Павлович, Москаленко Олександр Володимирович
МПК: E21B 1/00
Мітки: маніпулятор
Формула / Реферат:
Маніпулятор, що складається із стріли, шарнірно приєднаної до нерухомої напрямної телескопічного подавача бурильної машини, спареного гідроциліндра переміщення подавача нагору і вниз, гідроциліндра переміщення стріли маніпулятора у вертикальній площині, гідроциліндра повороту стріли маніпулятора за допомогою рейкової зубчатої передачі і кронштейна, до якого приєднана стріла, і гідроциліндра переміщення стріли у вертикальній площині, який...
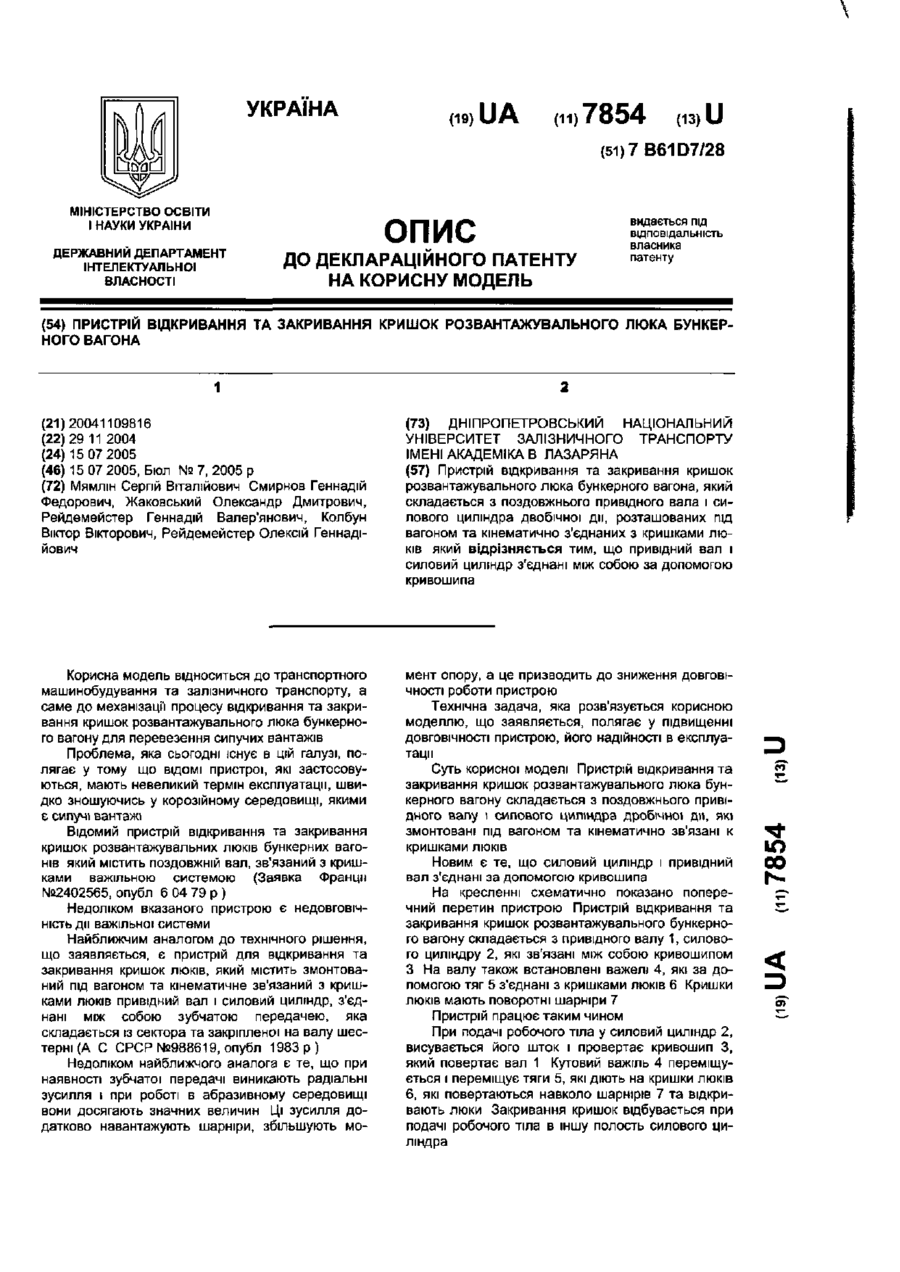
Пристрій відкривання та закривання кришок розвантажувального люка бункерного вагона
Номер патенту: 7854
Опубліковано: 15.07.2005
Автори: Колбун Віктор Вікторович, Мямлін Сергій Віталійович, Жаковський Олександр Дмитрович, Рейдемейстер Олексій Геннадійович, Смирнов Геннадій Федорович, Рейдемейстер Геннадій Валер'янович
МПК: B61D 7/28
Мітки: розвантажувального, закривання, відкривання, пристрій, вагона, бункерного, кришок, люка
Формула / Реферат:
Пристрій відкривання та закривання кришок розвантажувального люка бункерного вагона, який складається з поздовжнього привідного вала і силового циліндра двобічної дії, розташованих під вагоном та кінематично з'єднаних з кришками люків, який відрізняється тим, що привідний вал і силовий циліндр з'єднані між собою за допомогою кривошипа.
Попередній патент: Компресорна установка для стиснення водню
Наступний патент: Стенд для випробування шестеренних насосів
Випадковий патент: Спосіб гармонізуючого відновлення та корекції психологічного стану людей