Пристрій для вимірювання відстані до струмопровідної поверхні
Номер патенту: 95884
Опубліковано: 12.09.2011
Автори: Чугрєєв Анатолій Іванович, Депарма Олександр Вадимович, Мєтєльов Леонід Дмитрович, Цибулько Вадим Йосипович, Шульженко Микола Григорович, Єфремов Юрій Геннадійович
Формула / Реферат
Пристрій для виміру відстані до струмопровідної поверхні, що містить корпус-екран з розміщеними в ньому пружноінерційним і пружнов'язким елементами, двома котушками індуктивності, включеними відповідно в коло опорного і вимірювального автогенераторів, виходи яких підключені до входів перетворювача частоти, а вихід перетворювача частоти через послідовно з'єднані фільтр, частотний детектор і підсилювач підключений до входу вимірювального блока, джерело опорної напруги і струмопровідний елемент установлений з можливістю переміщення перед котушкою опорного генератора, а також суматор до першого входу якого підключений пристрій усереднення сигналу, другий вхід з'єднаний із джерелом опорної напруги, а вихід суматора, через керувальний елемент, підключений на другий вхід підсилювача й утворює зворотний зв'язок, який відрізняється тим, що встановлена перевірна котушка індуктивності й блок формування перевірних сигналів, вихід якого через керувальний елемент підключений до входу перевірної котушки індуктивності, причому перевірна котушка індуктивності нерухомо закріплена між опорною котушкою індуктивності і струмопровідним елементом, а другий вихід вимірювального блока підключений до входу блока формування перевірних сигналів і замикає коло зворотного зв'язку.
Текст
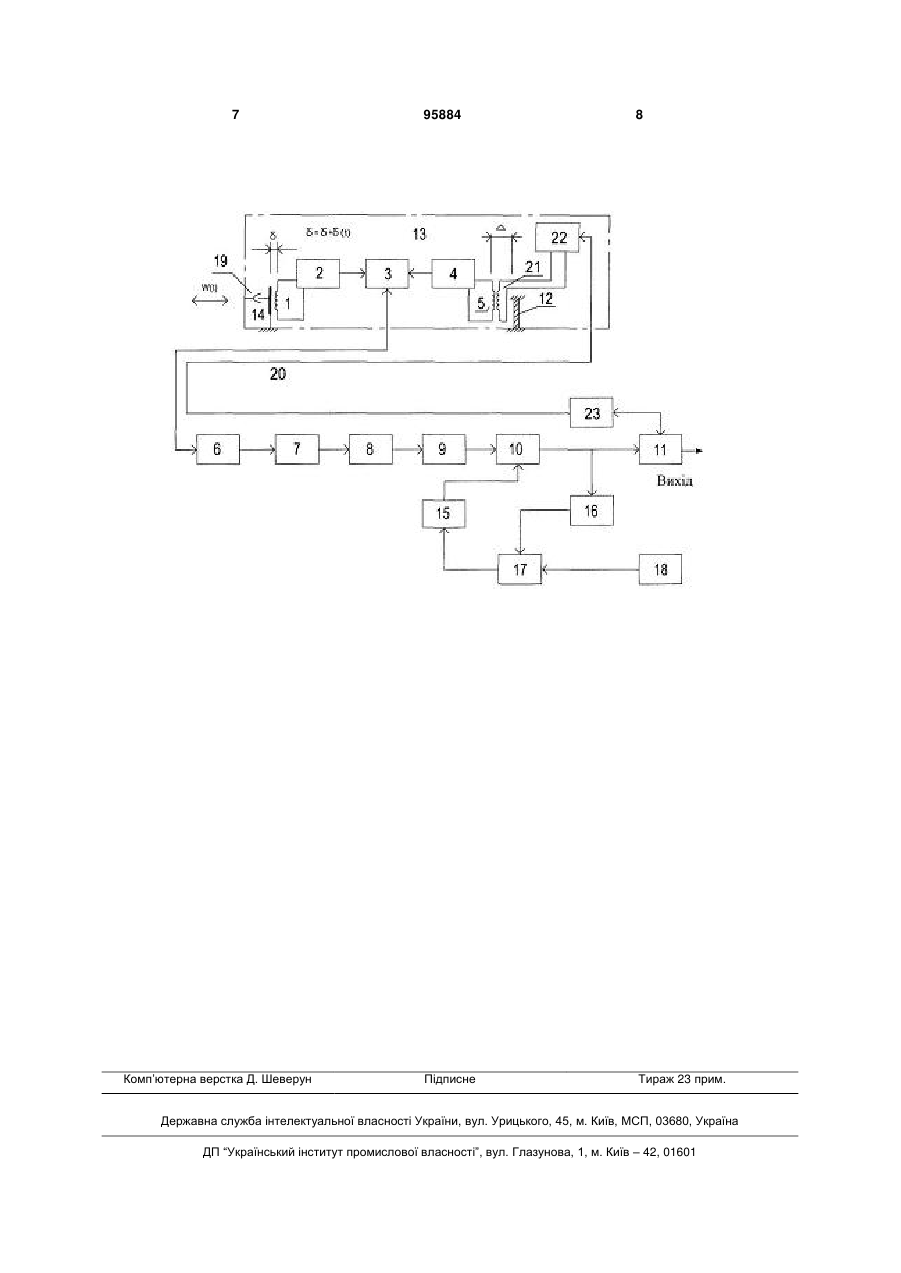
Пристрій для виміру відстані до струмопровідної поверхні, що містить корпус-екран з розміщеними в ньому пружноінерційним і пружнов'язким елементами, двома котушками індуктивності, включеними відповідно в коло опорного і вимірю C2 2 (19) 1 3 ньому двома котушками індуктивності, пружноінерційним і пружнов'язким елементами, опорним і вимірювальним автогенераторами. Котушки індуктивності включені відповідно в кола опорного й вимірювального автогенераторів, виходи яких підключені до входів перетворювача частоти, а вихід перетворювача частоти через послідовно з'єднані фільтр, частотний детектор і підсилювач, підключений до входу вимірювального блока. Крім цього, пристрій містить суматор, джерело опорної напруги і струмопровідний елемент установлений з можливістю переміщення перед котушкою опорного генератора, у корпусі-екрані встановлені пружноінерційний і пружнов'язкий елементи. До першого входу суматора підключений пристрій усереднення сигналу, другий вхід з'єднаний із джерелом опорної напруги, а вихід суматора, через керувальний елемент, підключений на другий вхід підсилювача й утворює зворотний зв'язок. Недоліками цього пристрою є те, що він не забезпечує одночасно вимір і контроль точності виміру працюючого вимірювального пристрою разом з вихорострумовим перетворювачем, установленим на об'єкті контролю, й тим самим не дозволяє підвищити точність виміру. В основу винаходу поставлена задача розробки пристрою для виміру відстані до струмопровідної поверхні, у якому за рахунок спільного використання додаткових структурних елементів здійснюється перевірка та автоматична корекція вимірювального каналу, що розширює область застосування, функціональні можливості і поліпшує точність виміру пристрою. Задача вирішується за рахунок того, що в пристрої для виміру відстані до струмопровідної поверхні, який містить корпус-екран з розміщеними у ньому пружноінерційним і пружнов'язким елементами, двома котушками індуктивності, включеними відповідно в кола опорного і вимірювального автогенераторів, виходи яких підключені до входів перетворювача частоти, а вихід перетворювача частоти через послідовно з'єднані фільтр, частотний детектор і підсилювач підключений до входу вимірювального блока, джерело опорної напруги і струмопровідний елемент, установлений з можливістю переміщення перед котушкою опорного генератора, а також суматор, до першого входу якого підключений пристрій усереднення сигналу, другий вхід з'єднаний із джерелом опорної напруги, а вихід суматора, через керувальний елемент, підключений на другий вхід підсилювача й утворює зворотний зв'язок, відповідно до винаходу, у пристрої встановлена перевірна котушка індуктивності і блок формування перевірних сигналів, вихід якого через керувальний елемент підключений до входу перевірної котушки індуктивності, причому перевірна котушка індуктивності нерухомо закріплена між опорною котушкою індуктивності і твердим струмопровідним елементом, а другий вихід вимірювального блока підключений до входу блока формування перевірних сигналів і замикає коло зворотного зв'язку. Використання перевірної котушки індуктивності, керувального елемента і блока формування перевірних сигналів для наскрізної перевірки вимі 95884 4 рювального каналу розширює область застосування, функціональні можливості та підвищує точність виміру пристрою. Розміщення перевірної котушки індуктивності поблизу опорної котушки індуктивності дозволяє не порушувати роботу котушки індуктивності вимірювального автогенератора, розширює функціональні можливості та підвищує точність виміру пристрою. Введення в пристрій блока формування перевірних сигналів, зв'язаного входом з вимірювальним блоком і виходом з керувальним елементом, дозволяє порівнювати перевірний сигнал з отриманим в вимірювальному блоці, чим розширює функціональні можливості й поліпшує точність виміру пристрою. Використання керувального елемента для формування перевірних сигналів з функціональною зміною електричних параметрів, внесених у котушку індуктивності опорного автогенератора із замкнутим колом перевірного зворотного зв'язку, розширює функціональні можливості, область застосування та підвищує точність виміру пристроїв з вихорострумовими перетворювачами як при роботі пристроїв самостійно, так і при роботі в складі систем вібродіагностики. На кресленні зображена блок-схема запропонованого пристрою. Пристрій містить вимірювальну котушку 1 індуктивності, вимірювальний автогенератор 2, перетворювач 3 частоти, опорний автогенератор 4, опорну котушку 5 індуктивності, фільтр різницевої частоти 6, підсилювач - обмежник 7, формувач 8 послідовності імпульсів, частотний детектор 9, підсилювач 10, вимірювальний блок 11, твердий струмопровідний елемент 12, корпус-екран вихорострумового перетворювача 13, пружноінерційний елемент 14 з електропровідною поверхнею, керувальний елемент 15, пристрій усереднення 16, суматор 17, джерело 18 опорної напруги, пружнов'язкий елемент 19, лінію зв'язку 20, перевірну котушку 21 індуктивності, керувальний елемент 22 і блок формування перевірних сигналів 23. Пристрій працює в такий спосіб. При зміні зазору δ між струмопровідною поверхнею пружноінерційного елемента 14 і вимірювальною котушкою 1 індуктивності на δ(t) відносного початкового δ0 пропорційно δ = δ0+ δ(t) генерується сигнал вимірювальним автогенератором 2 із частотою F(δ)=F(δ0)+F[δ(t)]. На виході перетворювача 3 частоти формується частотно-модульований сигнал різницевої частоти у вигляді ΔF(δ) = [F(δ0) - F(Δ)] + F(δ(t)), де: F(Δ) - частота опорного автогенератора 4; F(δ0) - частота вимірювального автогенератора 2 при початковому зазорі δ0 і відсутності девіації; F(δ(t)) -девіація різницевої частоти при впливі вібрації W(t) на корпус-екран у напрямку осі чутливості вихорострумового перетворювача переміщень 13 за рахунок переміщення пружноінерційного елемента 14 на δ(t); F(δ0)-F(Δ) = F0-початкова несуча різницева частота. Вона через неідентичність зміни параметрів елементів вимірювального й опорного автогенераторів 2 і 4 у часі та при впливі температури може змінюватися на ±ΔF0, що є причиною похибки вимірів. Тоді з урахуванням відзна 5 чених факторів сигнал на виході перетворювача 3 буде містити різницеву частоту у вигляді ΔF(δ) = (F0 ±ΔF0) + F(δ(t)). Після виділення сигналу різницевої частоти фільтром 6 і усунення амплітудної перешкоди підсилювачем-обмежником 7 формується формувачем 8 імпульсна частотно-модульована послідовність, що відповідає зміні різницевої частоти і, що частотним детектором 9 перетворює в пропорційний сигнал, який має вигляд U = (U0+ΔU0) + (U(t) + ΔU(t), де: U0 - постійна складова сигналу, пропорційна початковому зазору δ0 при нерухомому пружноінерційному елементі 14 і відповідає частоті F0; U(t) - змінна складова сигналу при переміщенні пружноінерційного елемента 14 на δ(t); ΔU0 - складова сигналу, що враховує вплив можливих температурних і часових змін на зміну несучої різницевої частоти F0 на ΔF0, при цьому знак плюс або мінус сигналу ΔU0 відповідає збільшенню або зменшенню несучої різницевої частоти F0; Двоскладова змінного сигналу, що виникає через зміну коефіцієнта перетворення при відхиленні різницевої несучої частоти від початкового значення F0 на Δ F0. Сигнал з виходу частотного детектора подається на перший вхід підсилювача 10, а з його виходу на вимірювальний блок 11 і на пристрій усереднення 16, у якому з посиленого сигналу U виділяється сигнал U0± ΔU0, що подається на перший вхід суматора 17, на другий вхід якого від джерела 18 опорної напруги подається із протилежним знаком сигнал, що дорівнює U0, і виділяється складова сигналу ± ΔU0. Виділений сигнал ΔU0 з виходу суматора 17 по колу зворотного зв'язку через керувальний елемент 15 подається на другий вхід підсилювача 10, по якому керувальним елементом 15 змінюється коефіцієнт підсилення підсилювача 10 відповідно до величини й знаку сигналу на ΔU0. Зміна коефіцієнта підсилення підсилювача 10 приводить до зменшення результуючого змінного сигналу на величину ΔU(t) й тим самим опосередкованим шляхом автоматично усувається (зводиться до мінімуму) похибка, що проявляється за рахунок зміни різницевої несучої частоти F0. У результаті чого зменшується і температурна і часова похибка вихорострумового перетворення вібрації, що підвищує точність вимірів. Взаємодія вимірювальної котушки вихорострумового перетворювача зі струмопровідною поверхнею об'єкта аналогічні явищам в індуктивно зв'язаних контурах. При цьому установка котушки вихорострумового перетворювача над струмопровідною поверхнею, що переміщується, приводить до зміни її електричних параметрів за рахунок внесених, а саме зміни її активного й індуктивного опору аналогічно зміні величини внесеного опору в первинній обмотці трансформатора при зміні навантаження у вторинній обмотці. Отже, надається можливість імітувати переміщення струмопровідної поверхні щодо вимірювальної котушки індуктивності шляхом зміни параметрів у колі перевірною котушкою індуктивності, індуктивно зв'язаної з опорною котушкою індуктивності опорного автогенератора вихорострумового перетворювача, і роз 95884 6 глядати їхню взаємодію на основі теорії зв'язаних контурів. Відповідно до цієї теорії величини внесеного активного RВH й реактивного ХВН опору в опорну котушку 5 вихорострумового перетворювача за рахунок перевірної котушки 21, замкнутої на опір керувального елемента 22 можуть бути подані у вигляді: RÂÍ XÂÍ 2Ì 2 1 (R0 RH ) (L0 XH)2 2Ì 2 (R0 RH )1 (L0 XH)2 (R0 RH ) ,(1) (L0 XH) де: M K LU L 0 - коефіцієнт взаємоіндукції RH,XH - активний і реактивний опори навантаження в колі перевірної котушки індуктивності LU - індуктивність опорної котушки індуктивності L0 - індуктивність перевірної котушки індуктивності R0 - власний опір перевірної котушки індуктивності К - коефіцієнт зв'язку між котушками індуктивності. З виразу (1) видно, що при незмінних параметрах опорної і перевірної котушок і незмінному їхньому взаємному положенні величини внесеного активного RBH і реактивного ХВН опору перевірної котушки індуктивності 21 в опорну котушку індуктивності 5 залежать від величини RBH і ХВН складових навантаження в колі перевірної котушки 21. Отже розміщення опорної котушки 5 автогенератора 4 на фіксованій відстані й нерухомо щодо перевірної котушки 21, замкнутої на опір навантаження, дозволяє шляхом зміни величини цього опору змінювати величину виносного опору в опорну котушку 4 автогенератора й тим самим змінювати його частоту. У результаті чого відповідно до зміни активного опору в колі перевірної котушки буде змінюватися на виході перетворювача 3 частоти різницева частота на ΔF(RH). А це еквівалентно впливу струмопровідної поверхні на вимірювальну котушку індуктивності 1, тобто забезпечується імітування переміщення струмопровідної поверхні шляхом зміни величини активного опору в колі перевірної котушки. Перевірка вимірювального каналу здійснюється зміною активного опору в колі перевірної котушки 21 індуктивності, для чого із блока формування перевірних сигналів 23 подається на вхід керувального елемента 22 керувальний сигнал ΔU(RH). У результаті чого на виході перетворювача 3 частоти формується сигнал із частотою ΔF(δ) ± ΔF(RH), що елементами пристрою (6, 7, 8, 9, 10) перетворюється в сигнал U(t) + ΔU(RH) і подається у вимірювальний блок 11, де зрівняється із заданим, а при відмінності AU(RH) від заданого перевірного сигналу, сигнал U(t) коректується. Таким чином здійснюється перевірка і автоматична корекція вимірювального каналу, чим вирішується задача, розширюються область застосування, функціональні можливості і поліпшується точність виміру пристрою. 7 Комп’ютерна верстка Д. Шеверун 95884 8 Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for measurement of distance to current-conductive surface
Автори англійськоюTsybulko Vadym Yosypovych, Meteliov Leonid Dmytrovych, Shulzhenko Mykola Hryhorovych, Deparma Oleksandr Vadymovych, Yefremov Yurii Hennadiiovych, Chuhreiev Anatolii Ivanovych
Назва патенту російськоюУстройство для измерения расстояния до токопроводящей поверхности
Автори російськоюЦибулько Вадим Иосифович, Метелев Леонид Дмитриевич, Шульженко Николай Григорьевич, Депарма Александр Вадимович, Ефремов Юрий Геннадиевич, Чугреев Анатолий Иванович
МПК / Мітки
МПК: G01B 7/14
Мітки: струмопровідної, вимірювання, відстані, пристрій, поверхні
Код посилання
<a href="https://ua.patents.su/4-95884-pristrijj-dlya-vimiryuvannya-vidstani-do-strumoprovidno-poverkhni.html" target="_blank" rel="follow" title="База патентів України">Пристрій для вимірювання відстані до струмопровідної поверхні</a>
Пристрій для вимірювання відстані до струмопровідної поверхні
Номер патенту: 61142
Опубліковано: 11.07.2011
Автори: Шульженко Микола Григорович, Чугрєєв Анатолій Іванович, Депарма Олександр Вадимович, Єфремов Юрій Геннадійович, Цибулько Вадим Йосипович, Мєтєльов Леонід Дмитрович
МПК: G01B 7/14
Мітки: пристрій, вимірювання, відстані, струмопровідної, поверхні
Формула / Реферат:
Пристрій для виміру відстані до струмопровідної поверхні, що містить корпус-екран з розміщеними в ньому пружноінерційним і пружнов'язким елементами, двома котушками індуктивності, включеними відповідно в коло опорного і вимірювального автогенераторів, виходи яких підключені до входів перетворювача частоти, а вихід перетворювача частоти через послідовно з'єднані фільтр, частотний детектор і підсилювач підключений до входу вимірювального...
Пристрій для вимірювання відстані до струмопровідної поверхні
Номер патенту: 87398
Опубліковано: 10.07.2009
Автори: Мєтєльов Леонід Дмитрович, Гуров Юрій Никифорович, Чугрєєв Анатолій Іванович, Депарма Олександр Вадимович, Єфремов Юрій Геннадійович, Шульженко Микола Григорович, Цибулько Вадим Йосипович
МПК: G01B 7/00
Мітки: вимірювання, струмопровідної, пристрій, поверхні, відстані
Формула / Реферат:
Пристрій для вимірювання відстані до струмопровідної поверхні, що містить корпус-екран із розташованими в ньому двома котушками індуктивності, включеними відповідно в коло опорного і вимірювального автогенераторів, виходи яких підключені до входів перетворювача частоти, а вихід перетворювача частоти через послідовно з'єднані фільтр, частотний детектор і підсилювач підключений до входу вимірювального блока, а також суматор, джерело опорної...
Пристрій для вимірювання відстані до струмопровідної поверхні
Номер патенту: 31940
Опубліковано: 25.04.2008
Автори: Чугрєєв Анатолій Іванович, Депарма Олександр Вадимович, Гуров Юрій Никифорович, Цибулько Вадим Йосипович, Єфремов Юрій Геннадійович, Мєтєльов Леонід Дмитрович, Шульженко Микола Григорович
МПК: G01B 7/14
Мітки: поверхні, вимірювання, відстані, струмопровідної, пристрій
Формула / Реферат:
Пристрій для вимірювання відстані до струмопровідної поверхні, що містить корпус-екран із розташованими в ньому двома котушками індуктивності, включеними відповідно в коло опорного і вимірювального автогенераторів, виходи яких підключені до входів перетворювача частоти, а вихід перетворювача частоти через послідовно з'єднані фільтр, частотний детектор і підсилювач підключений до входу вимірювального блока, а також суматор, джерело опорної...
Спосіб ультразвукового локаційного вимірювання відстані і пристрій для його реалізації
Номер патенту: 39336
Опубліковано: 15.06.2001
Автори: Гнітецька Тетяна Віталіївна, Гнітецький Віталій Анатолійович
МПК: G01F 23/296, G01F 23/28
Мітки: ультразвукового, локаційного, вимірювання, спосіб, реалізації, відстані, пристрій
Формула / Реферат:
1. Спосіб ультразвукового локаційного вимірювання відстані, що включає випромінення і прийом ультразвукових зондуючих імпульсів, підсилення прийнятих імпульсів, формування вимірюваного інтервалу, формування підрахункових імпульсів, цифрове перетворення вимірюваного інтервалу за допомогою підрахункових імпульсів, усереднення і цифрову індикацію віддалі від акустичного датчика до вимірюваного рівня, який відрізняється тим, що формування...
Автономний пристрій вимірювання відстані до імпульсного джерела випромінювання – “світло-звук”
Номер патенту: 41344
Опубліковано: 12.05.2009
Автори: Олійник Остап Олегович, Циганок Борис Архипович
МПК: G01C 3/00
Мітки: вимірювання, джерела, автономний, імпульсного, світло-звук, пристрій, відстані, випромінювання
Формула / Реферат:
1. Пристрій для вимірювання відстані до імпульсного джерела випромінювання, що містить фотоприймач імпульсного світлового випромінювання, вихід якого підключений до входу блока обчислення, вихід якого підключений до індикаторної панелі, а також блок живлення, який відрізняється тим, що в нього введений приймач імпульсного звукового сигналу від джерела випромінювання "світло-звук", причому вихід фотоприймача імпульсного світлового...
Попередній патент: Спосіб виготовлення панелей і виготовлена відповідно до способу панель
Наступний патент: Полірувальний склад
Випадковий патент: Процес стимуляції моторної активності кишечнику