Пристрiй управлiння самохiдною сiльськогосподарською машиною
Номер патенту: 974
Опубліковано: 15.12.1993
Автори: Кузьмінов Вадим Георгійович, Вчорашній Іван Григорович, Умеренко Аркадій Аркадійович, Збарський Борис Абрамович, Русанов Іван Іванович, Завгородній Віталій Євгенович
Формула / Реферат
Формула изобретения
Устройство управления самоходной сельскохозяйственной машиной, содержащее следящую систему с копирующими щупами, гидрораспределителем и гидроцилиндром поворота управляемых колес, гидроцилиндр обратной связи, узел дистанционного управления и клапан для слива потока рабочей жидкости при ручном управлении, отличающееся тем, что, с целью повышения точности управления и упрощения конструкции, гидроцилиндр обратной связи жестко соединен с гидрораспределителем, причем гидроцилиндр подключения к гидроцилиндру поворота управляемых колес параллельно в режиме ручного управления и последовательно в режиме автоматического управления посредством подсоединения одной из его полостей к выходному каналу гидрозамка, а другой — к одному из каналов подачи рабочей жидкости к гидроцилиндру поворота управляемых колес.
Текст
Изобретение относится к сельскохозяйственному машиностроению. Цель изобретения — повышение точности управления и упрощение конструкции устройства. Устройство содержит следящую систему, состоящую из колирующих щупов 1, кинематически связанных с золотником гидрораспределителя 2. Золотник гидрораспределителя соединен со штоком гндроцнлиндра 3. Гидроцилиндр 4 поворота управляемых колес магистрали 7 и 9 подсоединен к одному из каналов узла 6 дистанционного управления, питающегося из бака 10. Слив рабочей жидкости из системы в режиме ручного управления осуществляется через клапан 17 по магистрали 14 через фильтр 15 в бак 10 рабочей жидкости. Гидравлическая схема соединения гидроцилиндра обратной связи и поворота управляемых колес обеспечивает неподвижность штока гидроцилиндра обратной связи в режиме ручного управления. 1 ил. 00 "-si GO w 1 1287763 Изобретение относится к устройствам для автоматического управления движением самоходных сельскохозяйственных машин. Целью изобретения является повышение точности управления и упрощение конструкции устройства. На чертеже представлена схема устройства управления самоходной сельскохозяйственной машиной. Устройство состоит из датчиков, выполненных в виде копирующих щупов 1, кине- 10 матически связанных с золотником гидрораспределителя 2, корпус которого жестко соединен со штоком гидроцилиндра 3 обратной связи, гильза которого опирается непосредственно на раму машины. Беештоковые полости гидроцилиндра 3 обратной связи и гидроцилиндра 4 управляемых; колес 5 соединены параллельно и подключены к одному из каналов узла 6 дистанционного управления посредством магистрали 7, а штоковые их полости подсоединены каждая к выходному каналу гидрозамка 8 и магист- 20 ралью 9 ко второму каналу узла б дистанционного управления. Питание рабочей жидкостью схемы осуществляется из бака 10 насосом И по трубопроводу-магистрали 12 через узел б дистанционного управления и далее по магистрали 13 к гидрораспределителю 2, слив которого магистралью 14 через фильтр 15 соединен с баком 10. В устройство также входят предохранительный клапан 16 и клапан 17, обеспечивающие слив рабочей жидкости из узла 6 дистанционного управления в режиме управления непосредственно в бак 10. Торцевые полости клапана 17 трубопроводами-магистралями 18 и 19 подсоединяются непосредственно к магистралям 13 и 12. Устройство работает следующим образом Когда сигналы ручного и автоматического управления отсутствуют (рулевое колесо и копирующие щупы не изменяют свое положение), рабочая жидкость, подаваемая насосом 11, последовательно проходит через узел 6 дистанционного управления, распределитель 2 и сливается в маслобак 10 по цепи: насос 11, трубопровод 12, узел 6 дистанционного управления, трубопровод 13, гидрораспределитель 2, по магистрали 14 через фильтр J5 в бак 10. Таким образом, следящая система оказывается подготовленной к работе в автоматическом режиме. При отклонении машины от заданного направления копирующие щупы 1 начинают перемещаться в поперечном направлении. Эти перемещения приводят к перемещению золотника гидрораспределителя 2 относительно его корпуса, который удерживается штоком гидроцилиндра 3 обратной связи. Рабочая жидкость из бака 10 насосом 11 по магистрали 12 из нагнетательной полости распределителя узла 6 дистанционного уп 25 30 35 40 50 55 равления по магистрали 13 и направляется в гидрораспределитель 2 и через гидрозамок 8 -- в штоковую полость гидроцилиндра 4. Начинается поворот управляемых колес 5 вправо. Одновременно рабочая жидкость из бесштоковой полости гидроцилиндра 4 вытесняется в бесштоковую полость гидроцилиндра 3, перемещая его шток и соответственно корпус гидрораспределителя 2 до его нейтрального (относительно золотника) положения. Поворот управляемых колес 5 влево в режиме автовождения происходит аналогичным образом. Рабочая жидкость от гидрораспределителя 2 через гидрозамок 8 подается в штоковую полость гидроцилиндра 3 и, перемещая его поршень, вытесняет рабочую жид кость из противоположной полости в бес штоковую полость гидроцилиндра 4 поворота управляемых колес. При этом корпус гидрораспределителя 2 обратной связью устанавливается в нейтральное положение и поворот колес прекращается. В процессе управления слив из гидрораспределителя 2 осуществляется по магистрали 14 через фильтр 15 в бак 10. Режим ручного управления (корректировка направления движения машины при работе ее в режиме автоматического управления и транспортная езда) осуществляется поворотом рулевого колеса узла 6 дистанционного управления. При этом рабочая жидкость от насоса 11 по магистрали 12 через узел дистанционного управления поступает, например, по магистрали 7 в бесштоковые полости гидроцилиндра 4 поворота управляемых колес 5 и гидроцилиндра 3 обратной связи. При этом поршень гидроцилиндра 3 обратной связи остается неподвижным, так как объем рабочей жидкости в его штоковой полости заперт обратным клапаном гидрозамка 8. Слив из штоковой полости гидроцилиндра 4 поворота управляемых колес в бак 10 осуществляется по магистрали 9 через узел 6 дистанционного управления по магистралям 13 и 18 через клапан 17, переключенный при повороте рулевого колеса в позицию «Открыто», по магистрали 14 через фильтр 15. Так происходит поворот управляемых колес 5 влево. При повороте рулевого колеса узла 6 дистанционного управления вправо рабочая жидкость под давлением поступает в магистраль 9 и далее в штоковую полость гидроцилиндра 4 управляемых колес. Слив из бесштоковой полости осуществляется по магистрали 7 через узел 6 дистанционного управления и далее как при повороте управляемых колес 5 влево. Приоритет управляющего сигнала от узла 6 дистанционного управления осуществляется отключением в момент поворота его 1287763 рулевого колеса подачи рабочей жидкости в дящую систему с копирующими щупами, гидгидрораспределитель 2 путем соединения его рораспредслителем и гидроцилиндром повонапорной магистрали 13 через клапан 17, рота управляемых колес, гидроцилиндр обпереключенный при этом за счет перепада ратной связи, узел дистанционного управледавления в его торцевых полостях в позиния и клапан для слива потока рабочей жидцию «Открыто», с баком 10 рабочей жидкости при ручном управлении, отличающееся кости. тем, что, с целью повышения точности управТаким образом, в предлагаемом устройления и упрощения конструкции, гидроцистве достигается высокая точность управлелиндр обратной связи жестко соединен с гидния в автоматическом режиме, когда управрораспределителем, причем гидроцилиндр ляемые колеса с минимальной ошибкой обратной связи выполнен с возможностью отслеживают движение копирующих щупов, подключения к гидроцилиндру поворота упи наиболее простым путем обеспечивается равляемых колес параллельно в режиме ручпереход к режиму ручного управления в ного управления и последовательно в режирежиме ручной коррекции траектории и в ме автоматического управления посредством процессе транспортной езды. подсоединения одной из его полостей к выIS ходному каналу гидрозамка, а другой - - к Формула изобретения одному из каналов подачи рабочей жидкости к гидроцилиндру поворота управляеУстройство управления самоходной сельмых колес. скохозяйственной машиной, содержащее сле Составитель А Сапожников Редактор А Петров Техред И Верес Корректор И Муска Заказ 7726/1 Тираж 653 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж—35, Раушская наб , д 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4 **1
ДивитисяДодаткова інформація
Автори англійськоюUmerenko Arkadii Arkadiiovych, Kuzminov Vadym Heorhiiovych, Zavhorodnii Vitalii Yevhenovych, Zbarskyi Borys Abramovych, Rusanov Ivan Ivanovych, Vchorashnii Ivan Grygorovych
Автори російськоюУмеренко Аркадий Аркадьевич, Кузьминов Вадим Георгиевич, Завгородний Виталий Евгеньевич, Збарский Борис Абрамович, Русанов Иван Иванович, Вчерашний Иван Григорьевич
МПК / Мітки
МПК: A01B 69/04
Мітки: самохідною, сільськогосподарською, управління, пристрій, машиною
Код посилання
<a href="https://ua.patents.su/4-974-pristrijj-upravlinnya-samokhidnoyu-silskogospodarskoyu-mashinoyu.html" target="_blank" rel="follow" title="База патентів України">Пристрiй управлiння самохiдною сiльськогосподарською машиною</a>
Пристрій управління машиною для контактного стикового зварювання оплавленням

Номер патенту: 314
Опубліковано: 30.04.1993
Автори: Богорський Михайло Володимирович, Кривенко Валерій Георгійович, Кучук-Яценко Сергій Іванович, Горишняков Олексій Іванович, Лазебний Іван Леонтійович
МПК: B23K 11/04
Мітки: пристрій, машиною, зварювання, стикового, управління, оплавленням, контактного
Формула / Реферат:
(57) Устройство управления машиной для контактной стыковой сварки оплавлением, содержащее сварочный трансформатор, в его первичную обмотку включен датчик сварочного тока, соединенный с электрогидравлическим приводом перемещения плиты машины через блок управления приводом, отличающееся тем, что, с целью повышения производительности процесса сварки за счет сокращения времени на его протекание и повышения качества сварного соединения за счет...
Пристрiй печерського п.п. для виготовлення водних витяжок iз рослинної лiкарської сировини
Номер патенту: 824
Опубліковано: 01.01.1993
Автор: Печерський Петро Павлович
МПК: A61J 3/00
Мітки: п.п, виготовлення, пристрій, печерського, лікарської, сировини, рослинної, водних, витяжок
Формула / Реферат:
1. Устройство для приготовления водных извлечений из растительного лекарственного сырья, содержащее емкость для заливки извлекателя, установленный в ее полости перфорированный стакан для сырья с крышкой, средство для перемешивания извлекателя, электронагреватель и блок управления, отличающееся тем, что средство для перемешивания извлекателя представляет собой установленный коаксиально в полости перфорированного стакана патрубок, выходной...
Вимiрювальний пристрiй сортувальної машини
Номер патенту: 796
Опубліковано: 15.12.1993
Автори: Глотова Людмила Вікторовна, Смелянський Наум Лейбович, Савін Михайло Олексійович
МПК: A01G 1/06
Мітки: сортувальної, машини, пристрій, вимірювальний
Формула / Реферат:
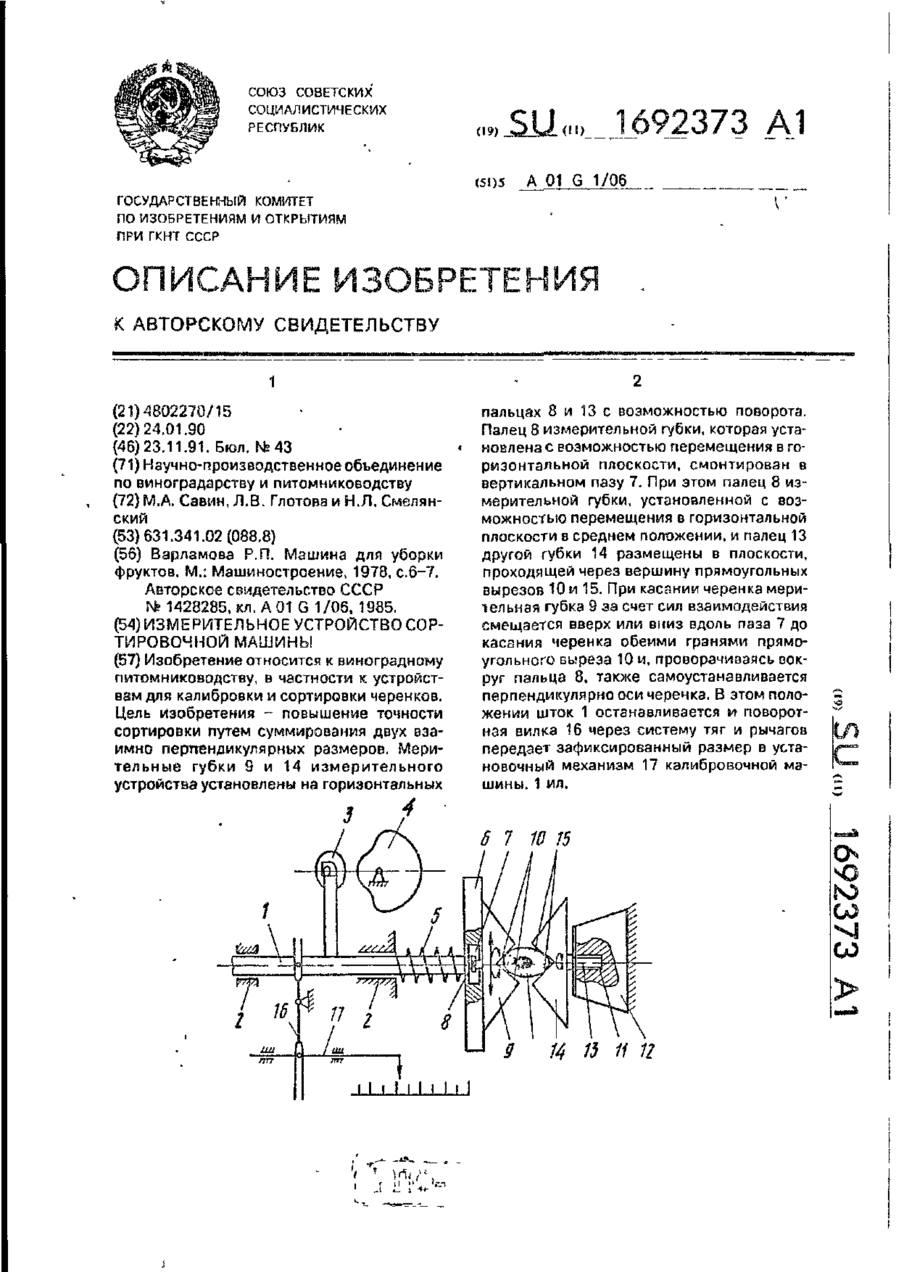
Формула изобретенияИзмерительное устройство сортировочной машины, содержащее мерительные губки с прямоугольным вырезом, одна из которых установлена с возможностью перемещений в горизонтальной плоскости, отличающееся тем, что, с целью повышения точности сортировки путем суммирования двух взаимно перпендикулярных размеров, мерительные губки установлены на горизонтальных пальцах с возможностью поворота, причем палец измерительной губки,...
Пристрiй для проведення дренажної трубки
Номер патенту: 803
Опубліковано: 15.12.1993
Автори: Синюк Вадим Вадимович, Зюбрицький Микола Михайлович
МПК: A61M 27/00
Мітки: проведення, пристрій, дренажної, трубки
Формула / Реферат:
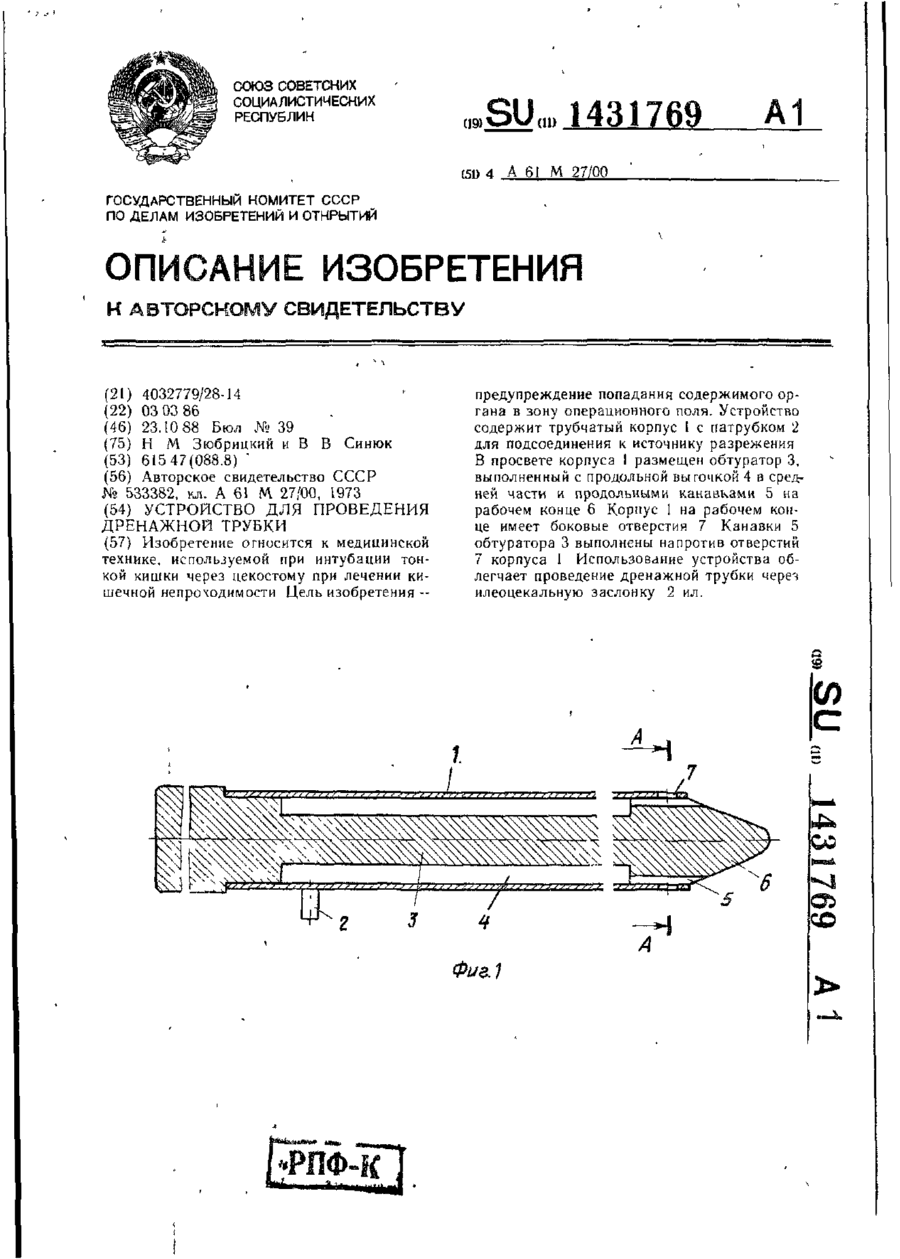
Формула изобретенияУстройство для проведения дренажной трубки, содержащее трубчатый корпус с патрубком для подсоединения к источнику разрежения, отличающееся тем, что, с целью предупреждения попадания содержимого органа в зону операционного поля, оно снабжено съемным обтуратором просвета корпуса, выполненным с продольной выточкой в средней части и продольными канавками на рабочем конце, а корпус на рабочем конце имеет боковые...
Пристрiй для викопування саджанцiв
Номер патенту: 682
Опубліковано: 15.12.1993
Автори: Возняк Григорій Олександрович, Зельцер Веніамін Якович, Зельцер Євген Веніамінович, Хебешеску Іван Федорович, Савін Михайло Олексійович, Сапожников Анатолій Михайлович, Смелянський Наум Лейбович
МПК: A01C 11/00
Мітки: викопування, саджанців, пристрій
Формула / Реферат:
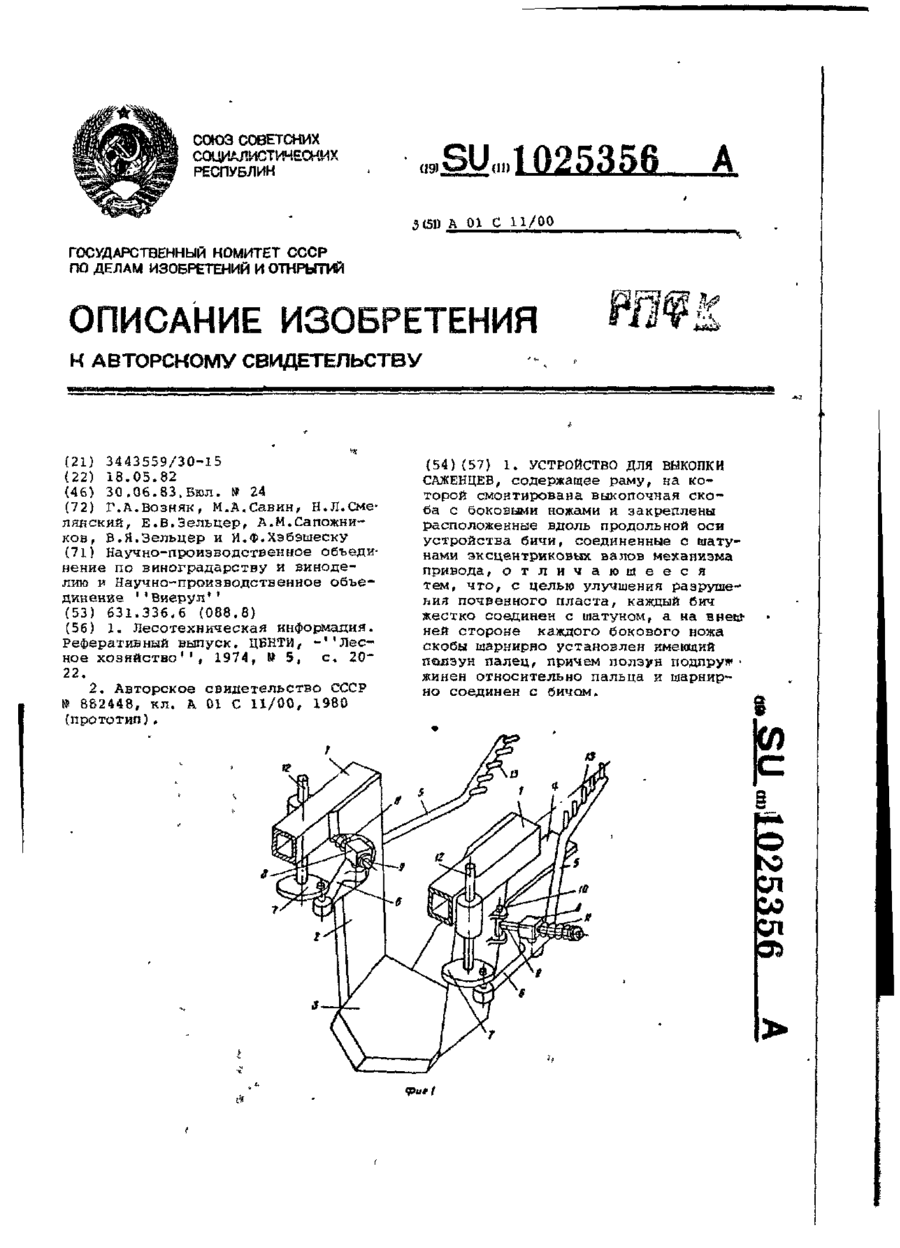
(57) 1. Устройство для выкопки саженцев, содержащее раму, на которой смонтирована выкопочная скоба с боковыми ножами и закреплены расположенные вдоль продольной оси устройства бичи, соединенные с шатунами эксцентриковых валов механизма привода, отличающееся тем, что, с целью улучшения разрушения почвенного пласта, каждый бич жестко соединен с шатуном, а на внешней стороне каждого бокового ножа скобы шарнирно установлен имеющий ползун палец,...
Попередній патент: Пристрій формування кольорових зображень
Наступний патент: Викопуючий пристрiй для коренеплодiв
Випадковий патент: Зразок для випробування листових матеріалів на зсув в площині листа