Лінійний двофазний індукторний двигун
Номер патенту: 9830
Опубліковано: 30.09.1996
Автори: Зільберг Ігор Михайлович, Ярославцев Михайло Іванович
Формула / Реферат
(57) Линейный двухфазный индукторный двигатель, содержащий ферромагнитный зубчатый статор и подвижный элемент, состоящий из четырех электромагнитных модулей, каждый из которых включает в себя два П-образных магнитопровода, обмотку управления и постоянный магнит, причем зубцовые зоны статора и подвижного элемента имеют одинаковый шаг ![]() , а электромагнитные модули разных фаз смещены относительно друг друга вдоль направления движения на(n ±1/4) •
, а электромагнитные модули разных фаз смещены относительно друг друга вдоль направления движения на(n ±1/4) • ![]() , отличающийся тем, что П-образные магнитопроводы в каждом модуле смещены друг относительно друга вдоль направления движения на (n ±1/8) -
, отличающийся тем, что П-образные магнитопроводы в каждом модуле смещены друг относительно друга вдоль направления движения на (n ±1/8) - ![]() . а электромагнитные модули, принадлежащие одной фазе - на (n ±1/2) •
. а электромагнитные модули, принадлежащие одной фазе - на (n ±1/2) • ![]() , где n - любое целое число.
, где n - любое целое число.
Текст
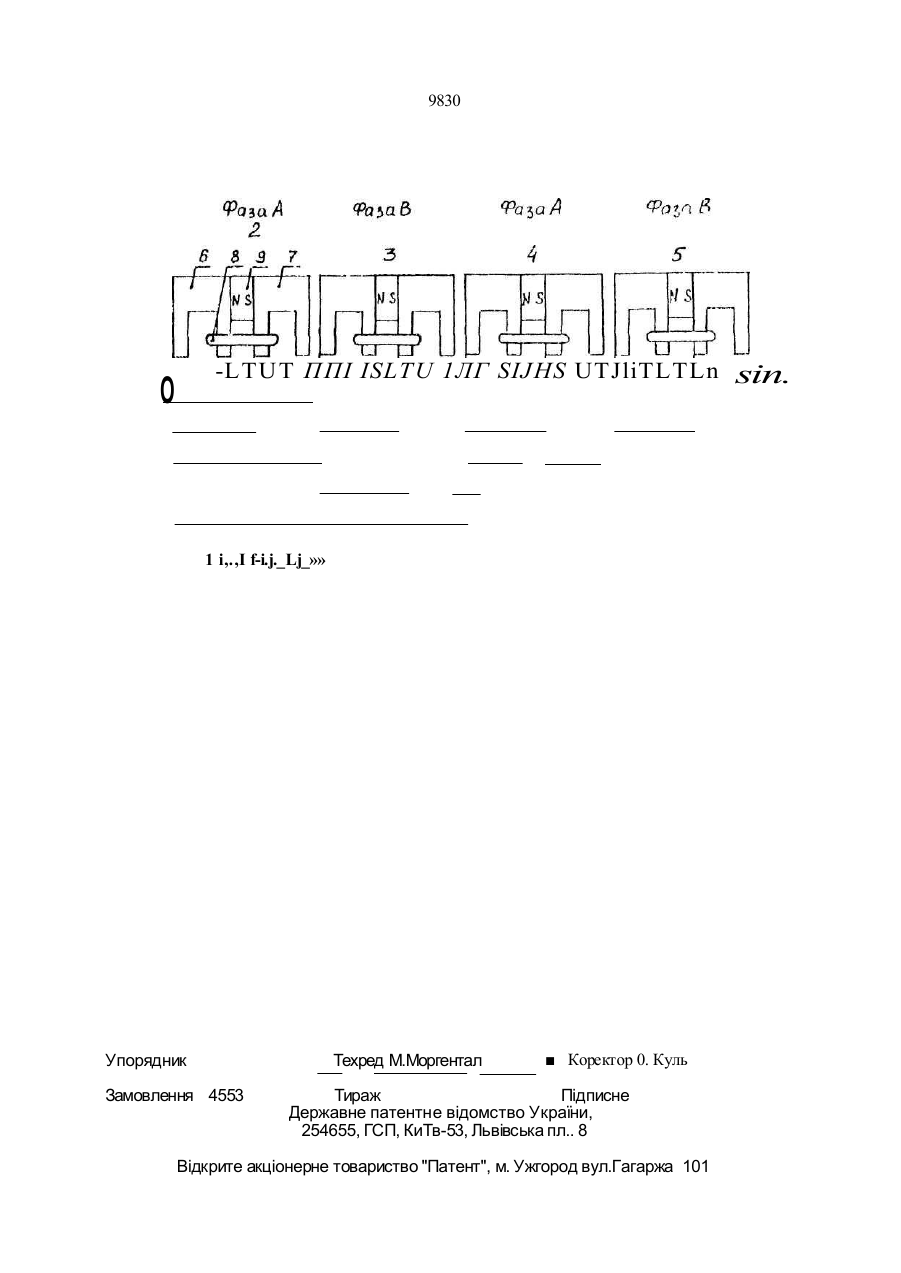
Линейный двухфазный индукторный двигатель, содержащий ферромагнитный зубчатый статор и подвижный элемент, со стоящий из четырех электромагнитных мо Изобретение относится к электротехнике и может быть использовано в линейном прецизионном электроприводе. Известен линейный двухфазный индукторный двигатель (1), содержащий ферромагнитный зубчатый статор и подвижный элемент, состоящий из четырех электромагнитных модулей, каждый из которых включае т в себя дв а П-об ра зны х магнитопровода, обмотку управления и постоянный магнит, причем зубцовые зоны статора и подвижного элемента имеют одинаковый шаг г. Электромагнитные модули разных фаз, а также электромагнитные модули, принадлежащие одной фазе, смещены относительно друг друга вдоль направления движения на (п ± 1 /4)т, где п - любое целое число. П-образные магнитопроводы в каждом электромагнитном модуле взаимно смещены на целое число шагов г. дулей, каждый из которых включает в себя два П-образных магнитопровода, обмотку управления и постоянный магнит, причем зубцовые зоны статора и подвижного элемента имеют одинаковый шаг г, а электромагнитные модули разных фаз смещены относительно друг друга вдоль направления движения на(п ±1/4) • г, о т л ич а ю щийс я тем, что П-образные магнитопроводы в каждом модуле смещены друг относительно друга вдоль направления движения на (п ±1/8) - г . а электромагнитные модули, принадлежа щие одной фазе - на (п ±1/2) • г, где п - любое целое число. При запитке обмотокуправления линейного двигателя синусоидальным и косинусоидальным токами равной амплитуды возникает сила тяги, пропорциональная амплитуде токов. Недостатком известного устройства является относительно невысокая удельная сила тяги, обусловленная частичной взаимной компенсацией тяговых усилий, создаваемых электромагнитными модулями. Наиболее близким к предлагаемому техническому решению является линейный двухфазный индукторный двигатель [2]. содержащий ферромагнитный зубчатый статор из подвижный элемент, состоящий из четырех электромагнитных модулей, каждый из которых включает в сеОя два П-образных магнитопровода, обмотку управления и постоянный магнит, причем, зубцовые зоны статора и подвижного элемента имеют одинаковый шаг т Электро С > о оо со о О 9830 магнитные моду ли разных фаз с мещены относ ительно д руг друга вд оль направления движ ения на (п ± 1 /4) г, где п - любое целое чис ло. Электромагнитные моду ли, принад лежащие одной фазе, а также П-образные 5 магнитопровод ы в каждом э лектромагнитном модуле взаимно смещены на целое чис ло шагов г. Линейный индукторный д вигатель об ладает д ос таточно выс окой уд ельной силой 10 тяги, од нако характеризу етс я тем, что при обес точенных обмотках управления пос то янные магниты э лектромагнитных моду лей порожд ают знакопеременную паразитну ю силу тяги, 15 Недос татком извес тного ус тройс тва яв ляетс я невысокая точнос ть регу лирования силы тяги, обусловленная наличием значительной паразитной с илы тяги. Технической задачей является повыше- 20 ние точнос ти регу лирования с илы тяги за счет у меньш ения паразитной силы тяги. Пос тавленная зад ача д ос тигаетс я тем, что в извес тном линейном д вух фазном индукторном двигателе, с од ержащем ферро- 25 магнитный зу бчатый с татор и под вижный элемент, сос тоящ ий из четырех электромагнитных моду лей, кажд ый из которых включает в с ебя два П-образных магнитопровода, обмотку у правления и по- 30 с тоянный магнит, причем, зу бцовые зоны статора и под вижного э лемента имеют од инак овый ш аг г, а э лектромагнитные моду ли разных фаз с мещ ены относ ите льно д ру г д ру га вд оль направлен ия д вижения на 35 (п ± 1 / 4)г, соглас но изобретению, П-образные магнитопровод ы в кажд ом э лектромагнитном моду ле с мещены д руг относительно д ру га вд о ль н апр ав л ен ия д в иж е ни я н а (n ± 1/ 8) г, а э лектромагнитные моду ли, 40 принад лежащие од ной фазе, - на (п ±1 / 2) г, где п - любое целое число. На чертеже предс тавлена схема линейного двух фазного индукторного двигателя. Двигатель с од ержит ферромагнитный 45 зу бчатый с татор 1 и подвиж ный э лемент, сос тоящий из э лек тромагнитных моду лей 2, 3,4,5. Каждый моду ль вклю*чает в себя П-образные магнитопровод ы 6 и 7, обмотку 8 управления и пос тоянный магнит 9 возбуж - 50 дения. Зу бцовые зоны с татора 1 и подвижного э лемента имеют од инак овый ш аг г. Электромагнитные моду ли 2 и 4, 3 и 5, принад лежащие од ной фазе, с мещены относ итель но д ру г д ру га вд оль на прав л ени я 55 д вижения на (п+ 1/ 2) г. Электромагнитные модули 2 и 3. 4 и 5, принадлежащие разным фазам, - на (п+1/ 4)г. В кажд ом э лектромагнитном моду ле П-образные магнитопрово ды 6 и 7 взаимно с мещ ены на (п-1/ 8)г , г де п - любое целое чис ло. Л инейны й д ву х фазны й инд у кторны й двигатель работает с ледующим образом, Управление двигателем осущес твляется пу тем запитки его обмоток синусоид альным и кос инус оид альным токами равной амплитуд ы л I. lB=loCOS(y где (р = -у -х- угол, опред еляющий положение под вижного э лемента двигателя относительно с татора, х - линейное положение под вижного элемента, г- шаг зу бцовых зон д вигателя, io - амплитуда токов. Токи управления ід и ів формиру ются в соответс твии с ин формацией о положении подвижного элемента в кажд ый момент времени. Сила тяги регу лиру етс я с помощью амплитуд ы токов управления. Опред елим силу тяги, развиваемую двигателем. В ос пользу емс я извес тной метод икой расчета электромагнитных модулей, в соответс твии с которой тяг овое усилие моду ля определяется как сумма ус илий, развиваемых его полюсами. Эти сос тавляющие тяговог о у с и л и я о п ред е л яю тс я и з с х е м ы замещения э лектромагнитного моду ля. Получим, что э лектромагнитные моду ли 2 и 3 буду т развивать тяг овые ус илия cos4(p)). (0,707K2-K3)Fox(sin(2 ' Am 9 -B g40.707K2-K3)Fox(sin(2 где Ki=9 0+ An, +Aj . K 2=29o+ k m k m и Aj - вну тренняя магнитная проводимос ть и провод имос ть расс еяния пос тоянного магнита, Fm - МДС пос тоянного магнита, 9о и 9i - пос тоянная сос тавляющая и амплитуда изменения магнитной проводимос ти зазора между с татором и полюс ов модуля, w - чис ло витков обмотки управления. Поскольку тяговое усилие, развиваемое электромагнитным модулем 4 равно тяг ово му усилию моду ля 2, а тяговое усилие, раз 9830 виваемое модулем 5, равно тяговому усилию модуля 3, то сила тяги линейного двигателя, равная сумме тяговых усилий всех электромагнитных модулей, будет равной 1«у(2п+1): )М.2,4; п-0,1.2.... исключаются из-за взаимной компенсации из каждых восьми слагаемых. Аналогичным образом определим силу тяги, развиваемую известным линейным двигателем, и возникающую при этом паразитную силу тяги. Получим, что при запитке обмоток уп равления токами / F=2 Fo(0,924Fm 'лп, Гд е У 0,70 7 К г = 290 Кз Кз =0,707-0,293 290' 10 , IB=IOCOS ). где fi и
ДивитисяДодаткова інформація
Назва патенту англійськоюLinear tw-phase inductor motor
Автори англійськоюYaroslavtsev Mykhailo Ivanovych, Zilberg Ihor Mykhailovych
Назва патенту російськоюЛинейный двухфазный индукторный двигатель
Автори російськоюЯрославцев Михаил Иванович, Зильберг Игорь Михаилович
МПК / Мітки
МПК: H02K 41/03
Мітки: двофазний, індукторний, лінійний, двигун
Код посилання
<a href="https://ua.patents.su/4-9830-linijjnijj-dvofaznijj-induktornijj-dvigun.html" target="_blank" rel="follow" title="База патентів України">Лінійний двофазний індукторний двигун</a>
Лінійний індукторний двигун
Номер патенту: 3221
Опубліковано: 26.12.1994
Автори: Ярославцев Михайло Іванович, Волков Геннадій Дмитрович, Зільберт Ігор Михайлович
МПК: H02K 41/03
Мітки: двигун, індукторний, лінійний
Формула / Реферат:
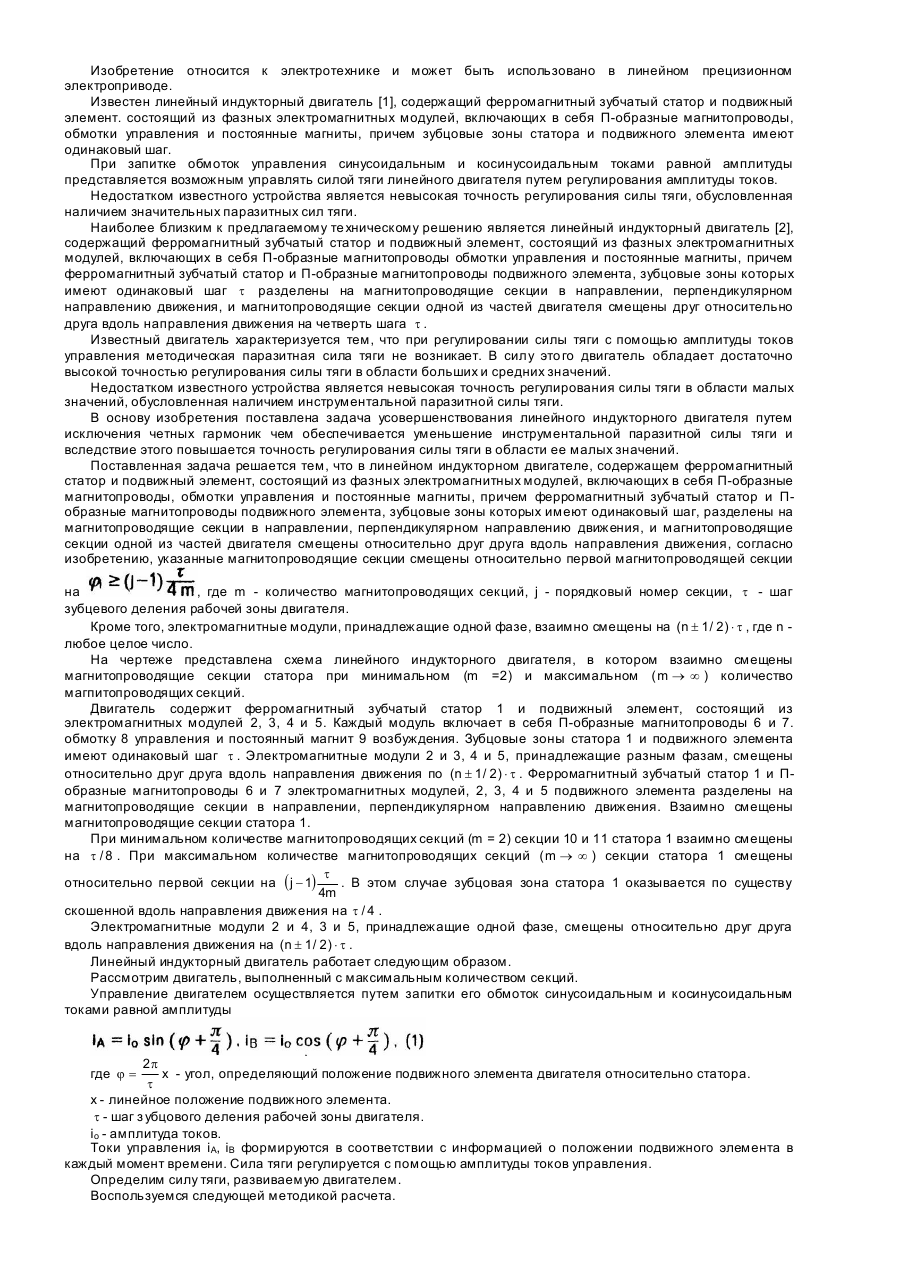
1. Линейный индукторный двигатель, содержащий ферромагнитный статор и подвижный элемент, состоящий из фазных электромагнитных модулей, включающий в себя П-образные магнитопроводы, обмотки управления и постоянные магниты, причем ферромагнитный зубчатый статор и П-образные магнитопроводы подвижного элемента, зубцовые зоны которых имеют одинаковый шаг, разделены на магнитопроводящие секции в направлении, перпендикулярном направлению движения, и...
Лінійний індукторний електродвигун
Номер патенту: 2926
Опубліковано: 26.12.1994
Автор: Ярославцев Михайло Іванович
МПК: H02K 41/03
Мітки: електродвигун, індукторний, лінійний
Формула / Реферат:
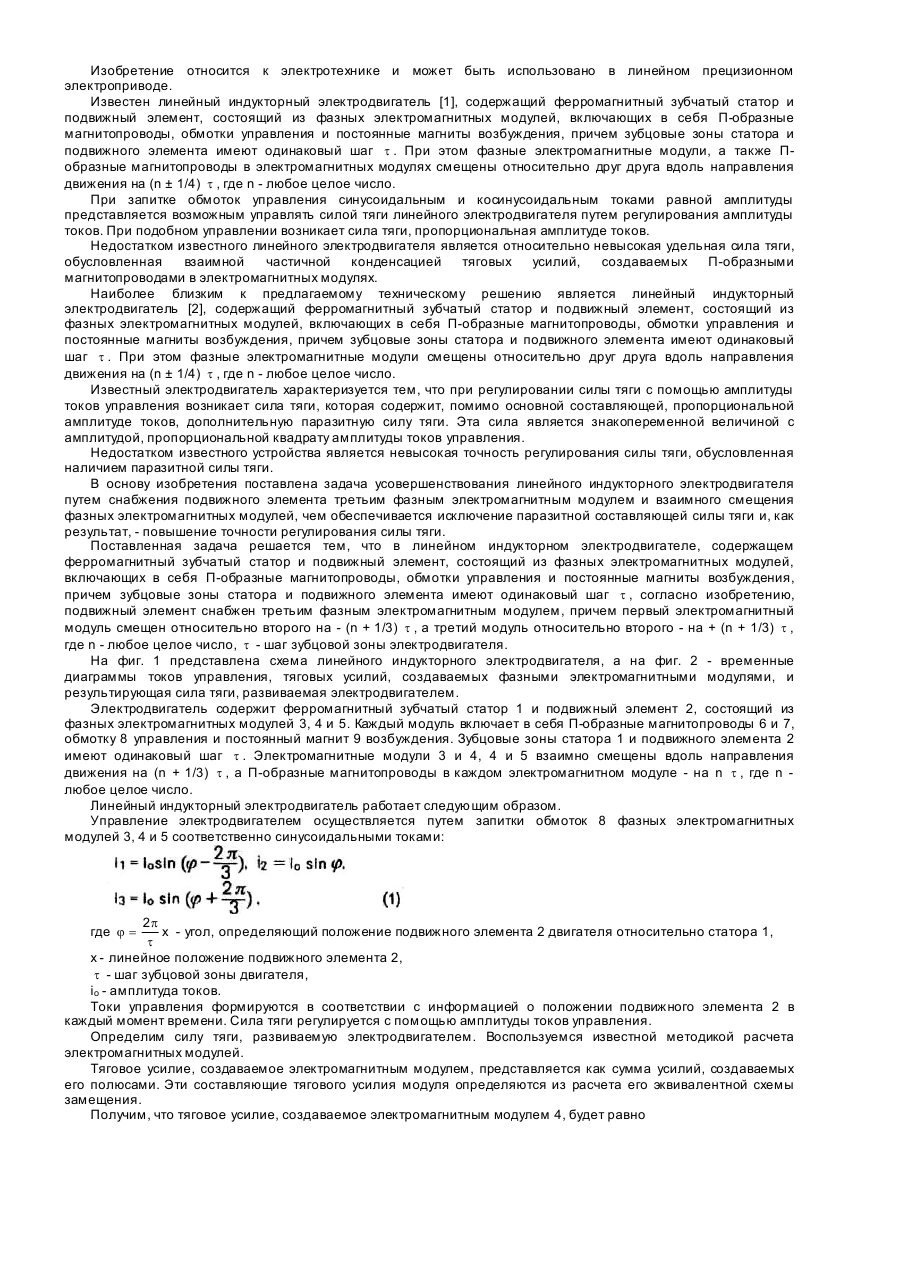
Линейный индукторный электродвигатель, содержащий ферромагнитный зубча тый статор и подвижный элемент, состоящий из фазных электромагнитных модулей, включающих в себя П-образные магнитопроводы, обмотки управления и постоянные магниты возбуждения, причем зубцовые зоны статора и подвижного элемента имеют одинаковый шаг, отличающийся тем, что подвижный элемент снабжен третьим фазным электромагнитным модулем, причем первый электромагнитный...
Лінійний індукторний двигун
Номер патенту: 1825
Опубліковано: 20.12.1994
Автор: Ярославцев Михайло Іванович
МПК: H02K 41/02
Мітки: лінійний, двигун, індукторний
Формула / Реферат:
1. Линейный индукторный двигатель, содержащий ферромагнитный зубчатый статор и подвижный элемент, состоящий из фазных электромагнитных модулей, включающих в себя П-образные магнитопроводы, обмотки управления и постоянные магниты возбуждения, отличающийся тем, что, с целью повышения точности регулирования силы тяги, по крайней мере два магнитопроводящих элемента, принадлежащие одной фазе, смещены друг относительно друга вдоль направления...
Лінійний кроковий електродвигун

Номер патенту: 2136
Опубліковано: 26.12.1994
Автори: Ненека Мирослав Федорович, Завгородній Віктор Дмитрович
МПК: H02K 41/03
Мітки: кроковий, електродвигун, лінійний
Формула / Реферат:
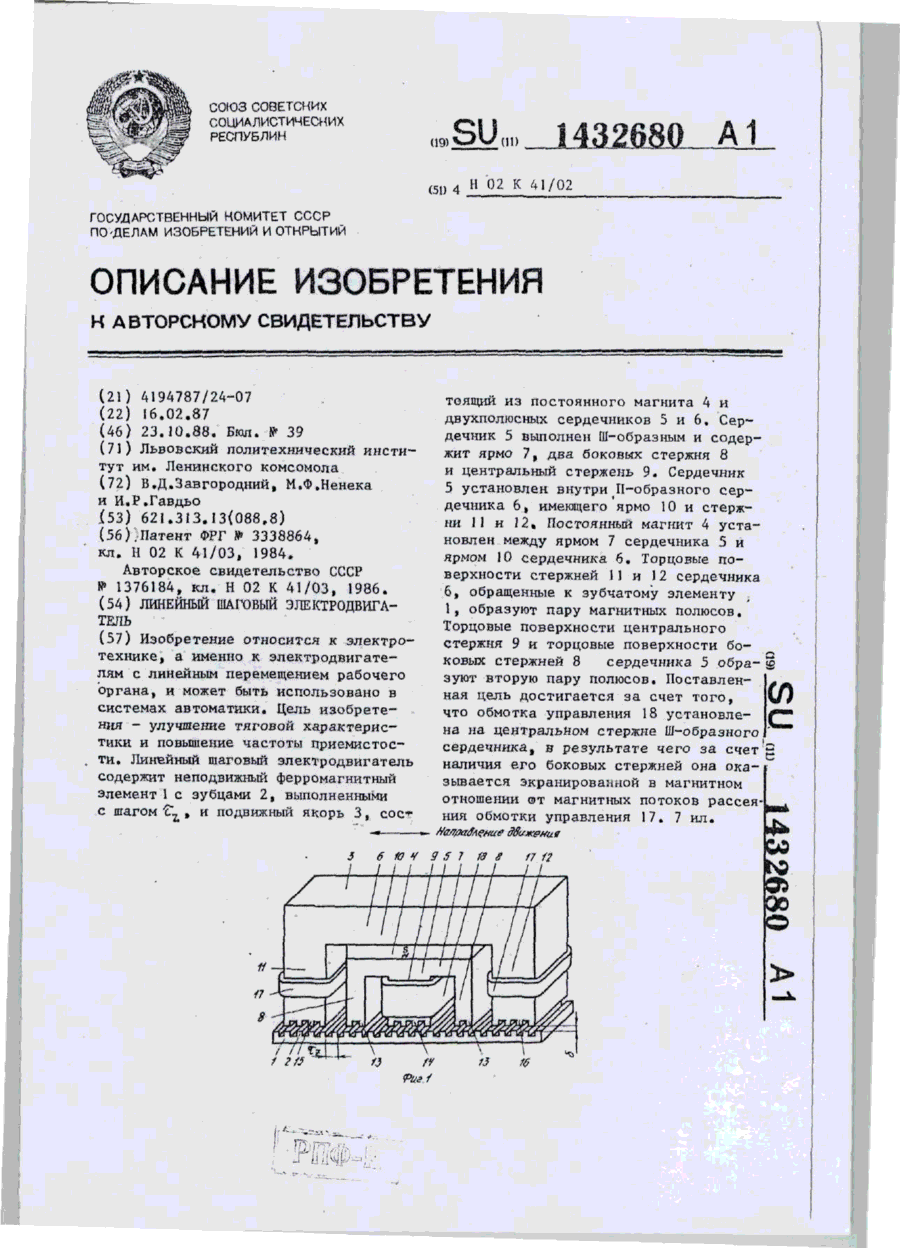
Линейный шаговый электродвигатель, содержащий зубчатый ферромагнитный индуктор и якорь, состоящий из двух П-образных сердечников с зубчатыми полюсами, на которых расположены обмотки управления, и постоянного магнита, установленного между сердечниками, отличающийся тем, что, с целью повышения точности позиционирования, один П-образный сердечник расположен в другом с возможностью их взаимного смещения относительно полюсов, при этом...
Лінійний кроковий електродвигун
Номер патенту: 2137
Опубліковано: 26.12.1994
Автори: Ненека Мирослав Федорович, Гавдьо Ігор Романович, Завгородній Віктор Дмитрович
МПК: H02K 41/02
Мітки: електродвигун, кроковий, лінійний
Формула / Реферат:
Линейный шаговый электродвигатель, содержащий ферромагнитный зубчатый элемент с шагом зубцов tz и якорь, состоящий из охватывающего и охваченного двухполюсных сердечников с установленными на них обмотками управления постоянного магнита, расположенного между ярмами сердечников, причем на торцовых поверхностях стержней сердечников, обращенных к зубчатому элементу, выполнены группы зубцов с шагом tz, отличающийся тем, что, с целью улучшения...
Попередній патент: Автокореляційний відносний фазовий демодулятор
Наступний патент: Спосіб частотно-струмового управління двофазним синхронним двигуном
Випадковий патент: Фіточай "комфорт жінок"