Рукавичний автомат
Номер патенту: 98414
Опубліковано: 27.04.2015
Автори: Чабан Олексій Віталійович, Піпа Борис Федорович, Музичишин Сергій Володимирович


Формула / Реферат
Рукавичний автомат, що містить проміжну каретку з встановленим в ній пальцем та в'язальну каретку, з'єднану з проміжною кареткою за допомогою пальця, який відрізняється тим, що додатково обладнаний електромагнітом, з'єднаним з пальцем, при цьому палець встановлений в проміжну каретку з можливістю осьового переміщення.
Текст
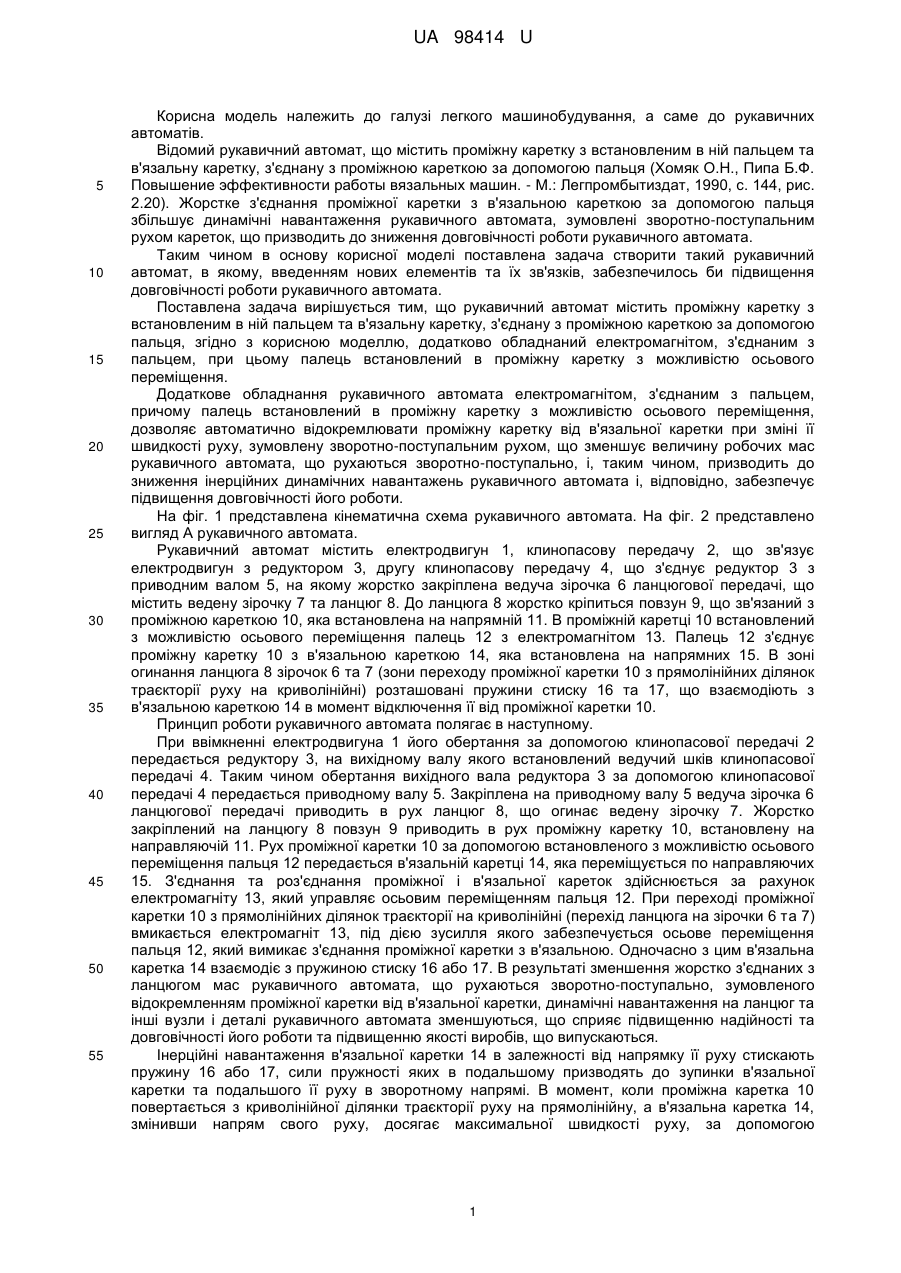
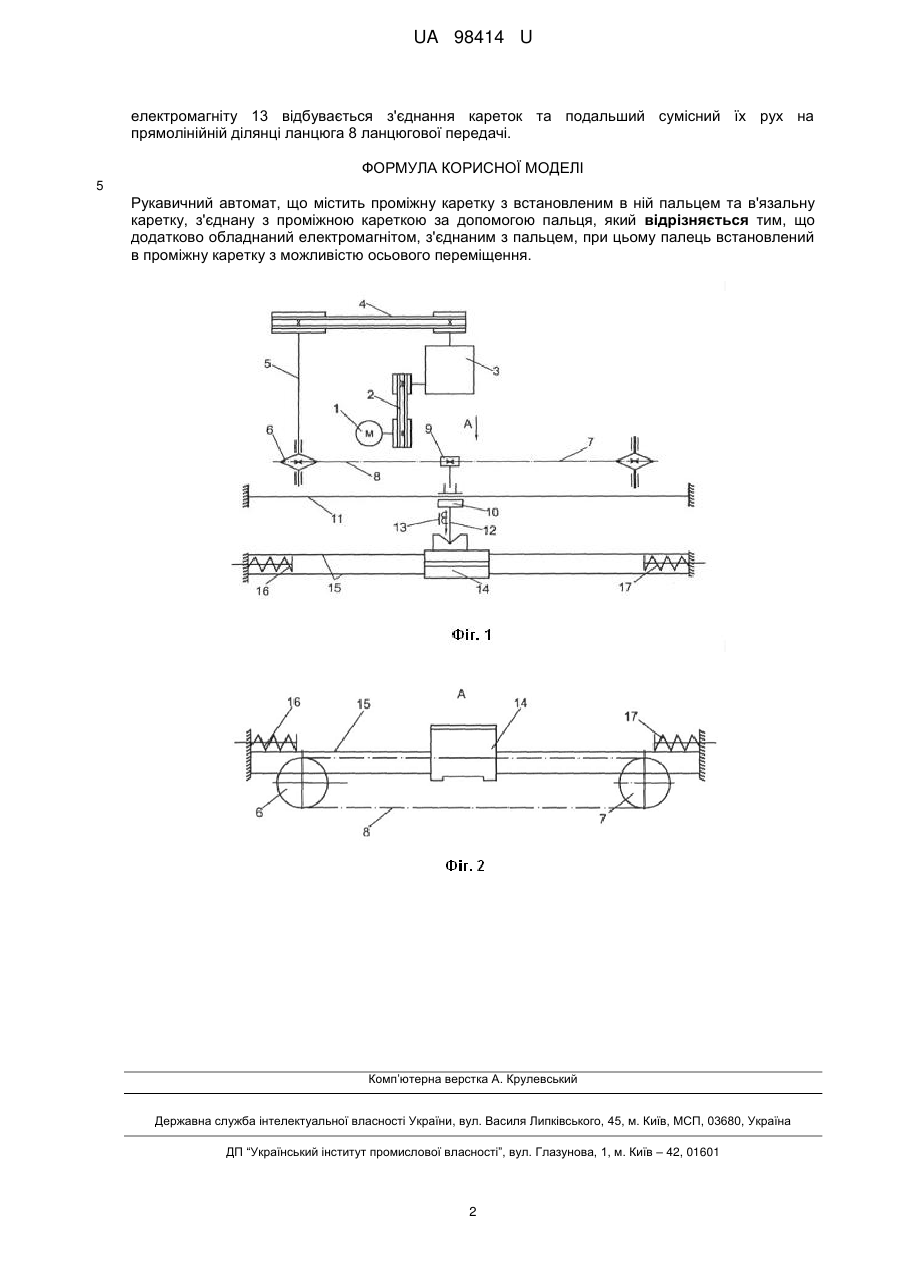
Реферат: Рукавичний автомат містить проміжну каретку з встановленим в ній пальцем та в'язальну каретку, з'єднану з проміжною кареткою за допомогою пальця. Додатково обладнаний електромагнітом, з'єднаним з пальцем. При цьому палець встановлений в проміжну каретку з можливістю осьового переміщення. UA 98414 U (54) РУКАВИЧНИЙ АВТОМАТ UA 98414 U UA 98414 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі легкого машинобудування, а саме до рукавичних автоматів. Відомий рукавичний автомат, що містить проміжну каретку з встановленим в ній пальцем та в'язальну каретку, з'єднану з проміжною кареткою за допомогою пальця (Хомяк О.Н., Пипа Б.Ф. Повышение эффективности работы вязальных машин. - М.: Легпромбытиздат, 1990, с. 144, рис. 2.20). Жорстке з'єднання проміжної каретки з в'язальною кареткою за допомогою пальця збільшує динамічні навантаження рукавичного автомата, зумовлені зворотно-поступальним рухом кареток, що призводить до зниження довговічності роботи рукавичного автомата. Таким чином в основу корисної моделі поставлена задача створити такий рукавичний автомат, в якому, введенням нових елементів та їх зв'язків, забезпечилось би підвищення довговічності роботи рукавичного автомата. Поставлена задача вирішується тим, що рукавичний автомат містить проміжну каретку з встановленим в ній пальцем та в'язальну каретку, з'єднану з проміжною кареткою за допомогою пальця, згідно з корисною моделлю, додатково обладнаний електромагнітом, з'єднаним з пальцем, при цьому палець встановлений в проміжну каретку з можливістю осьового переміщення. Додаткове обладнання рукавичного автомата електромагнітом, з'єднаним з пальцем, причому палець встановлений в проміжну каретку з можливістю осьового переміщення, дозволяє автоматично відокремлювати проміжну каретку від в'язальної каретки при зміні її швидкості руху, зумовлену зворотно-поступальним рухом, що зменшує величину робочих мас рукавичного автомата, що рухаються зворотно-поступально, і, таким чином, призводить до зниження інерційних динамічних навантажень рукавичного автомата і, відповідно, забезпечує підвищення довговічності його роботи. На фіг. 1 представлена кінематична схема рукавичного автомата. На фіг. 2 представлено вигляд А рукавичного автомата. Рукавичний автомат містить електродвигун 1, клинопасову передачу 2, що зв'язує електродвигун з редуктором 3, другу клинопасову передачу 4, що з'єднує редуктор 3 з приводним валом 5, на якому жорстко закріплена ведуча зірочка 6 ланцюгової передачі, що містить ведену зірочку 7 та ланцюг 8. До ланцюга 8 жорстко кріпиться повзун 9, що зв'язаний з проміжною кареткою 10, яка встановлена на напрямній 11. В проміжній каретці 10 встановлений з можливістю осьового переміщення палець 12 з електромагнітом 13. Палець 12 з'єднує проміжну каретку 10 з в'язальною кареткою 14, яка встановлена на напрямних 15. В зоні огинання ланцюга 8 зірочок 6 та 7 (зони переходу проміжної каретки 10 з прямолінійних ділянок траєкторії руху на криволінійні) розташовані пружини стиску 16 та 17, що взаємодіють з в'язальною кареткою 14 в момент відключення її від проміжної каретки 10. Принцип роботи рукавичного автомата полягає в наступному. При ввімкненні електродвигуна 1 його обертання за допомогою клинопасової передачі 2 передається редуктору 3, на вихідному валу якого встановлений ведучий шків клинопасової передачі 4. Таким чином обертання вихідного вала редуктора 3 за допомогою клинопасової передачі 4 передається приводному валу 5. Закріплена на приводному валу 5 ведуча зірочка 6 ланцюгової передачі приводить в рух ланцюг 8, що огинає ведену зірочку 7. Жорстко закріплений на ланцюгу 8 повзун 9 приводить в рух проміжну каретку 10, встановлену на направляючій 11. Рух проміжної каретки 10 за допомогою встановленого з можливістю осьового переміщення пальця 12 передається в'язальній каретці 14, яка переміщується по направляючих 15. З'єднання та роз'єднання проміжної і в'язальної кареток здійснюється за рахунок електромагніту 13, який управляє осьовим переміщенням пальця 12. При переході проміжної каретки 10 з прямолінійних ділянок траєкторії на криволінійні (перехід ланцюга на зірочки 6 та 7) вмикається електромагніт 13, під дією зусилля якого забезпечується осьове переміщення пальця 12, який вимикає з'єднання проміжної каретки з в'язальною. Одночасно з цим в'язальна каретка 14 взаємодіє з пружиною стиску 16 або 17. В результаті зменшення жорстко з'єднаних з ланцюгом мас рукавичного автомата, що рухаються зворотно-поступально, зумовленого відокремленням проміжної каретки від в'язальної каретки, динамічні навантаження на ланцюг та інші вузли і деталі рукавичного автомата зменшуються, що сприяє підвищенню надійності та довговічності його роботи та підвищенню якості виробів, що випускаються. Інерційні навантаження в'язальної каретки 14 в залежності від напрямку її руху стискають пружину 16 або 17, сили пружності яких в подальшому призводять до зупинки в'язальної каретки та подальшого її руху в зворотному напрямі. В момент, коли проміжна каретка 10 повертається з криволінійної ділянки траєкторії руху на прямолінійну, а в'язальна каретка 14, змінивши напрям свого руху, досягає максимальної швидкості руху, за допомогою 1 UA 98414 U електромагніту 13 відбувається з'єднання кареток та подальший сумісний їх рух на прямолінійній ділянці ланцюга 8 ланцюгової передачі. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 Рукавичний автомат, що містить проміжну каретку з встановленим в ній пальцем та в'язальну каретку, з'єднану з проміжною кареткою за допомогою пальця, який відрізняється тим, що додатково обладнаний електромагнітом, з'єднаним з пальцем, при цьому палець встановлений в проміжну каретку з можливістю осьового переміщення. Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Автори англійськоюPipa Borys Fedorovych, Makatiora Dmytro Anatoliiovych
Автори російськоюПипа Борис Федорович, Макатера Дмитрий Анатольевич
МПК / Мітки
МПК: D04B 15/00, D04B 15/16
Мітки: автомат, рукавичний
Код посилання
<a href="https://ua.patents.su/4-98414-rukavichnijj-avtomat.html" target="_blank" rel="follow" title="База патентів України">Рукавичний автомат</a>
Привід в’язальної каретки рукавичного автомата
Номер патенту: 93984
Опубліковано: 27.10.2014
Автори: Піпа Борис Федорович, Чабан Олексій Віталійович
МПК: D04B 15/96
Мітки: автомата, в'язальної, рукавичного, привід, каретки
Формула / Реферат:
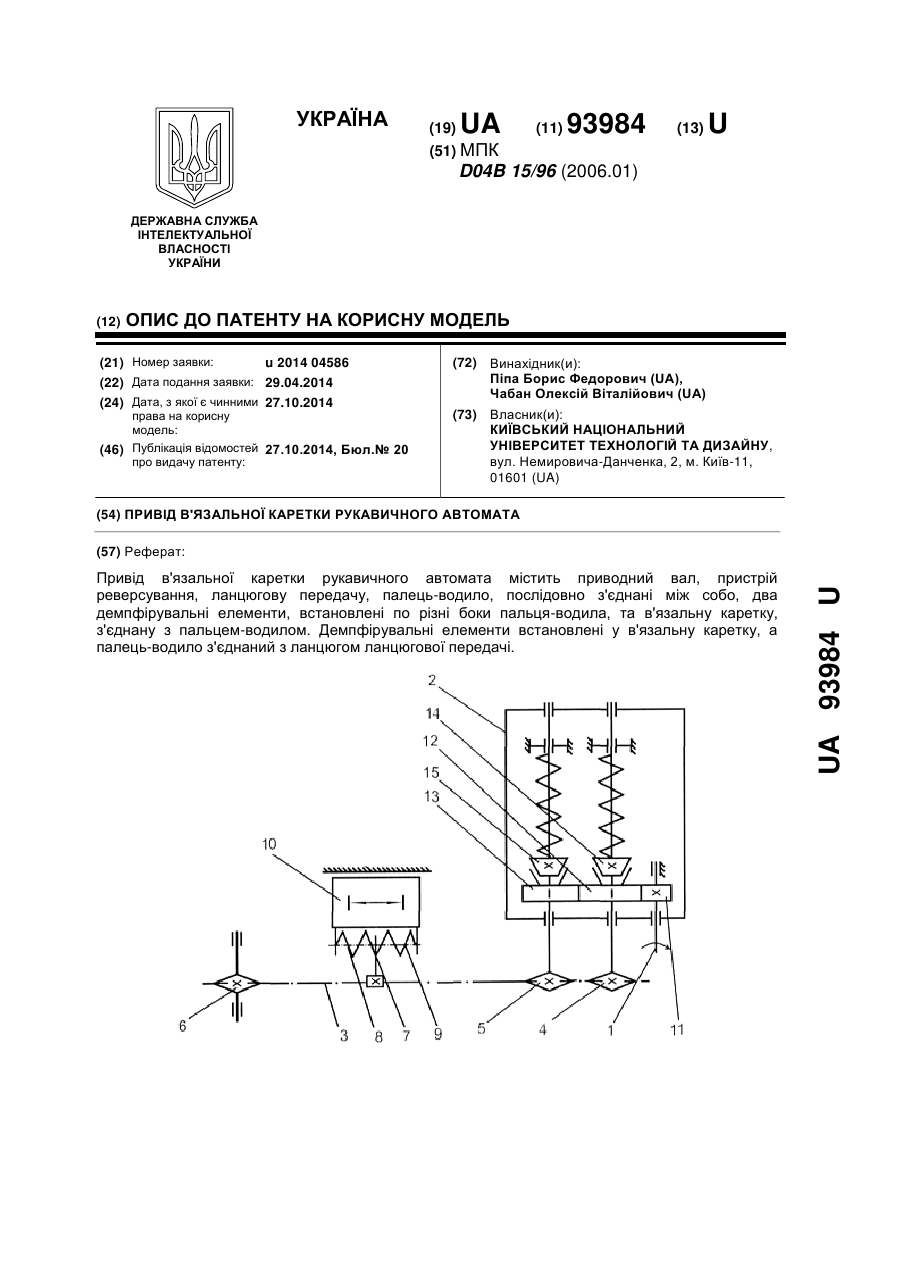
1. Привід в'язальної каретки рукавичного автомата, що містить приводний вал, пристрій реверсування, ланцюгову передачу, палець-водило, послідовно з'єднані між собою, два демпфірувальні елементи, встановлені по різні боки пальця-водила, та в'язальну каретку, з'єднану з пальцем-водилом, який відрізняється тим, що демпфірувальні елементи встановлені у в'язальну каретку, а палець-водило з'єднаний з ланцюгом ланцюгової передачі.2. Привід...
Привід рукавичного автомата
Номер патенту: 98249
Опубліковано: 27.04.2015
Автори: Чабан Олексій Віталійович, Музичишин Сергій Володимирович, Піпа Борис Федорович
МПК: D04B 15/16
Мітки: привід, рукавичного, автомата
Формула / Реферат:
Привід рукавичного автомата, що містить зв'язані між собою електродвигун, ланцюгову передачу, що містить ведучу, ведену зірочки та ланцюг, проміжну та в'язальну каретки з напрямними, з'єднані між собою, та пружину розтягу, встановлену в напрямній проміжної каретки з можливістю взаємодії з нею, причому проміжна каретка з'єднана з ланцюгом та в'язальною кареткою послідовно, який відрізняється тим, що додатково обладнаний двома пружинами...
Привід рукавичного автомата
Номер патенту: 94303
Опубліковано: 10.11.2014
Автори: Піпа Борис Федорович, Чабан Олексій Віталійович, Чабан Віталій Васильович
МПК: D04B 15/16, D04B 15/96
Мітки: рукавичного, привід, автомата
Формула / Реферат:
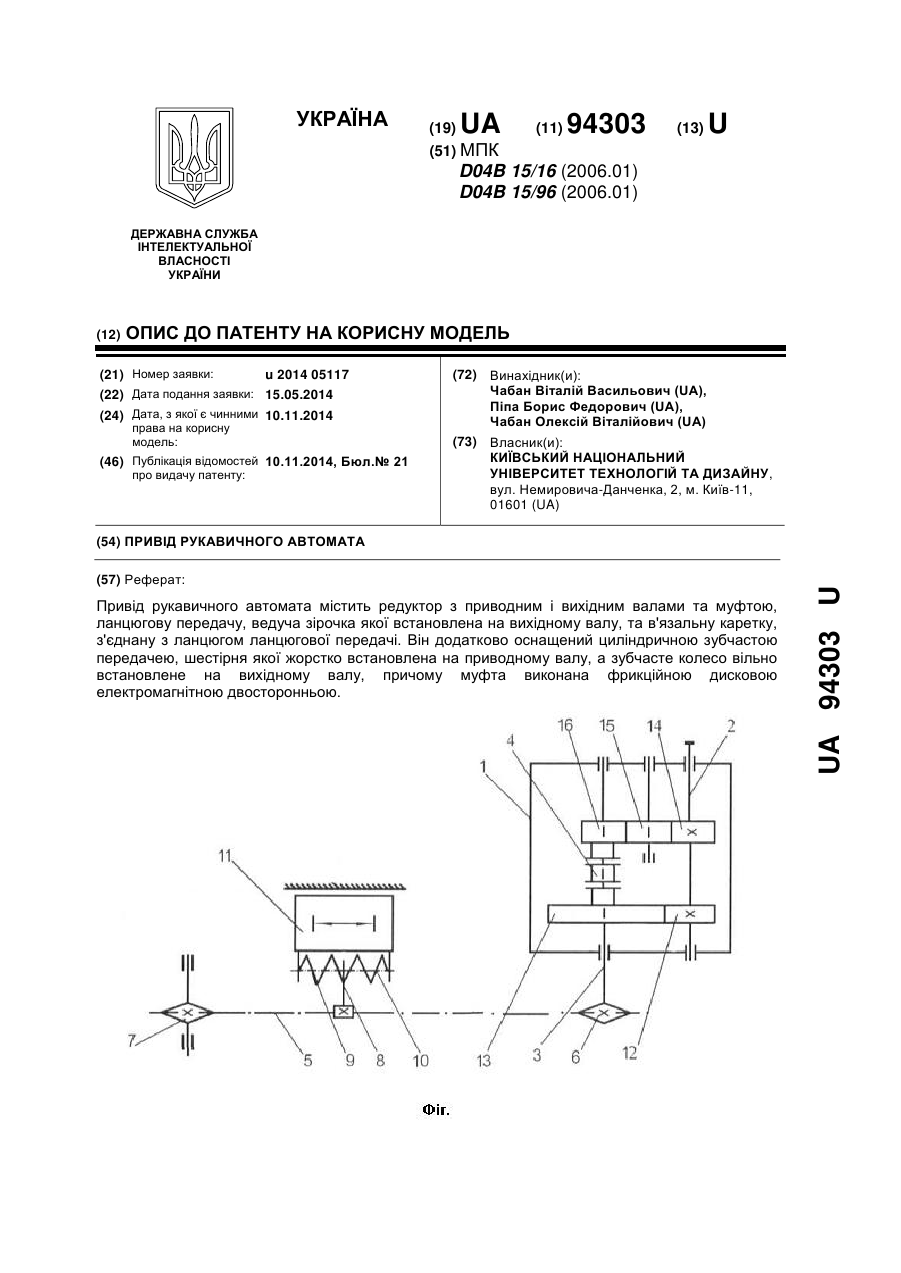
Привід рукавичного автомата, що містить редуктор з приводним і вихідним валами та муфтою, ланцюгову передачу, ведуча зірочка якої встановлена на вихідному валу, та в'язальну каретку, з'єднану з ланцюгом ланцюгової передачі, який відрізняється тим, що додатково оснащений циліндричною зубчастою передачею, шестірня якої жорстко встановлена на приводному валу, а зубчасте колесо вільно встановлене на вихідному валу, причому муфта виконана...
Цвяховий автомат
Номер патенту: 5470
Опубліковано: 15.03.2005
Автори: Ведмедь Юрій Петрович, Глущенко Володимир Миколайович, Оробей Леонід Дмитрович
МПК: B21G 3/00
Формула / Реферат:
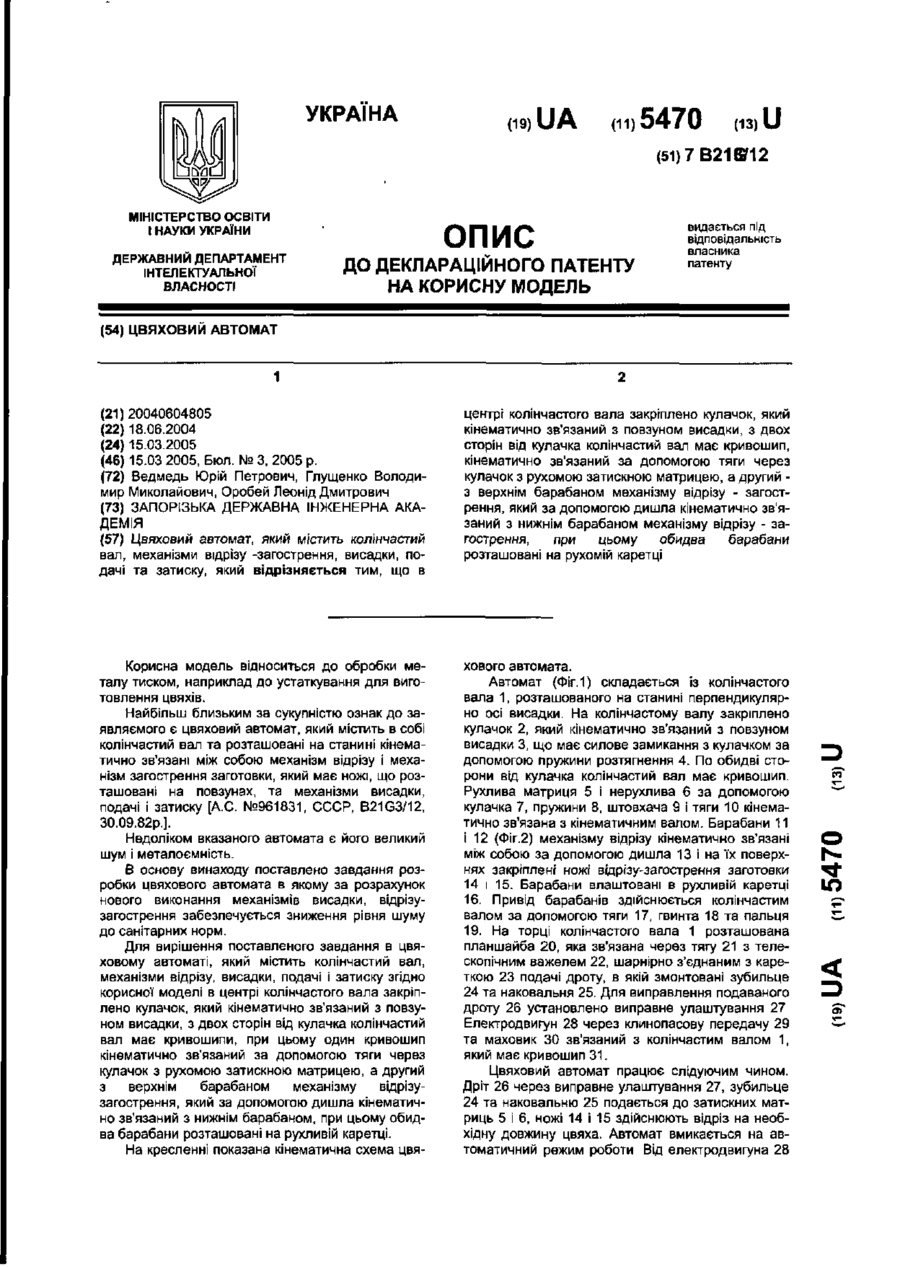
Цвяховий автомат, який містить колінчастий вал, механізми відрізу -загострення, висадки, подачі та затиску, який відрізняється тим, що в центрі колінчастого вала закріплено кулачок, який кінематично зв'язаний з повзуном висадки, з двох сторін від кулачка колінчастий вал має кривошип, кінематично зв'язаний за допомогою тяги через кулачок з рухомою затискною матрицею, а другий - з верхнім барабаном механізму відрізу - загострення, який за...
Автомат для продажу газет та іншої друкованої на паперовому носії продукції
Номер патенту: 79038
Опубліковано: 10.04.2013
Автор: Трофімов Руслан Валерійович
МПК: G07F 7/02
Мітки: друкованої, продукції, іншої, автомат, продажу, паперовому, газет, носії
Формула / Реферат:
Автомат для продажу газет та іншої друкованої на паперовому носії продукції, що містить корпус, в якому розміщений пристрій введення для отримання запиту на доступ до автомата, який відрізняється тим, що в корпусі автомата розміщений внутрішній комп'ютер, до якого підключений пристрій введення для отримання запиту на доступ до автомата у вигляді сенсорного екрана, причому до внутрішнього комп'ютера підключений грошоприймач, модуль з'єднання...
Попередній патент: Спосіб визначення довговічності матеріалу
Наступний патент: Привід основов’язальної машини
Випадковий патент: Продувний клапан