Система і спосіб керування посівом
Формула / Реферат
1. Спосіб створення карти посіву насіння для поля і керування сівалкою, що включає:
a) детектування кожного імпульсу насінини, що формується датчиком насіння, при проходженні насіння через прохід для насіння висівної секції сівалки при її переміщенні по полю під час посівних операцій;
b) визначення місцеположення посіву насіння для кожної насінини в полі зіставленням часу кожного сформованого імпульсу насінини з місцеположенням блока GPS;
c) збереження в пам'яті кожного місцеположення посіву насіння в полі; і
d) збереження в пам'яті затримки між командою і одним з імпульсів насіння.
2. Спосіб за п. 1, в якому сівалка містить множину секцій, кожна з яких містить щонайменше одну з висівних секцій.
3. Спосіб за п. 2, в якому кожна секція включає в себе привід, який керує видачею насіння з секції.
4. Спосіб за п. 3, в якому кожна секція включає в себе контролер секції, який при приведенні в дію виводить з функціональної взаємодії привід для зупинки видачі насіння секцією.
5. Спосіб за п. 4, в якому при переміщенні сівалки по полю під час посівних операцій контролери секцій приводяться в дію для виведення з функціональної взаємодії приводів для зупинки видачі насіння відповідними секціями при проходженні відповідними секціями по будь-яких попередньо збережених місцеположеннях посіву насіння.
6. Спосіб за п. 5, в якому границя зупинки посіву задається за допомогою одного з групи, яка містить: будь-які попередньо збережені місцеположення посіву насіння; зовнішню границю поля; і внутрішню границю поля.
7. Спосіб за п. 6, який додатково включає вибір необхідної схеми покриття з групи, яка містить: недостатній посів; надмірний посів; і надмірний посів/недостатній посів 50/50 границі зупинки посіву.
8. Спосіб за п. 3, в якому команда містить сигнал керування, відправлений на привід, а затримка відповідає часу між командою і необхідною зміною в посіві насіння, при цьому затримка визначається з використанням імпульсів насіння, причому спосіб додатково включає синхронізацію подальшої команди на основі затримки.
9. Спосіб за п. 4, в якому команда містить сигнал керування, відправлений на контролер секції, а затримка відповідає часу між командою і необхідною зміною в посіві насіння, при цьому затримка визначається з використанням імпульсів насіння, причому додатково включає синхронізацію подальшої команди на основі затримки.
10. Спосіб за п. 3, який додатково включає:
запуск приводу в момент запуску; і
відображення попереджувального сигналу користувачеві, якщо імпульси насіння не детектовані протягом заданого часу після моменту запуску.
11. Спосіб за п. 4, який додатково включає:
приведення в дію контролера секції в момент запуску; і
відображення попереджувального сигналу користувачеві, якщо імпульси насіння детектовані після заданого часу після моменту запуску.
12. Спосіб калібрування сільськогосподарської сівалки, виконаної з можливістю видачі насіння, що включає:
детектування насіння при його видачі висівною секцією сівалки;
відправлення керуючого сигналу на пристрій керування сівалки так, що є затримка між керуючим сигналом і результуючою зміною у видачі насіння; і
вимірювання затримки на основі часу, в який одна або більше насінин видаються після відправлення керуючого сигналу.
13. Спосіб за п. 12, в якому керуючий пристрій являє собою контролер секції, який при приведенні в дію виводить з функціональної взаємодії привід, який керує видачею насіння для зупинки видачі насіння.
14. Спосіб за п. 12, в якому пристрій керування являє собою привід, який керує видачею насіння.
15. Спосіб за п. 13, який додатково включає етапи:
багаторазового вимірювання затримки; і
визначення частини затримки, яка залежить від швидкості, з якою насіння випускається, до приведення в дію контролера секції.
16. Система керування посівом сільськогосподарської сівалки з множиною висівних секцій, кожна з яких має дозатор насіння, виконаний з можливістю випускання насіння в прохід для насіння, що містить:
контролер секції, функціонально з'єднаний з сівалкою;
блок GPS, виконаний з можливістю визначення місцеположення сівалки;
систему моніторингу на зв'язку з блоком GPS і контролером секції, виконану з можливістю визначення присутності однієї з множини умов зупинки посіву в згаданому місцеположенні і додатково виконану з можливістю надання вибору користувачеві підмножини умов зупинки посіву, в які приводиться в дію контролер секції; і
датчик насіння, розміщений відносно проходу для насіння для формування імпульсів насіння при проходженні насіння, при цьому система моніторингу виконана з можливістю визначення місцеположення посіву насіння для кожної насінини зіставленням часу кожного сформованого імпульсу насінини з місцеположенням сівалки.
17. Система за п. 16, в якій одна з умов зупинки посіву включає в себе пересікання зовнішньої границі поля.
18. Система за п. 16, в якій одна з умов зупинки посіву включає в себе пересікання внутрішньої границі поля.
19. Система за п. 16, в якій одна з умов зупинки посіву включає в себе вхід в зону, в якій користувач планує висівати насіння згодом.
20. Система за п. 16, в якій одна з умов зупинки посіву включає в себе пересікання інших місцеположень посіву насіння.
Текст
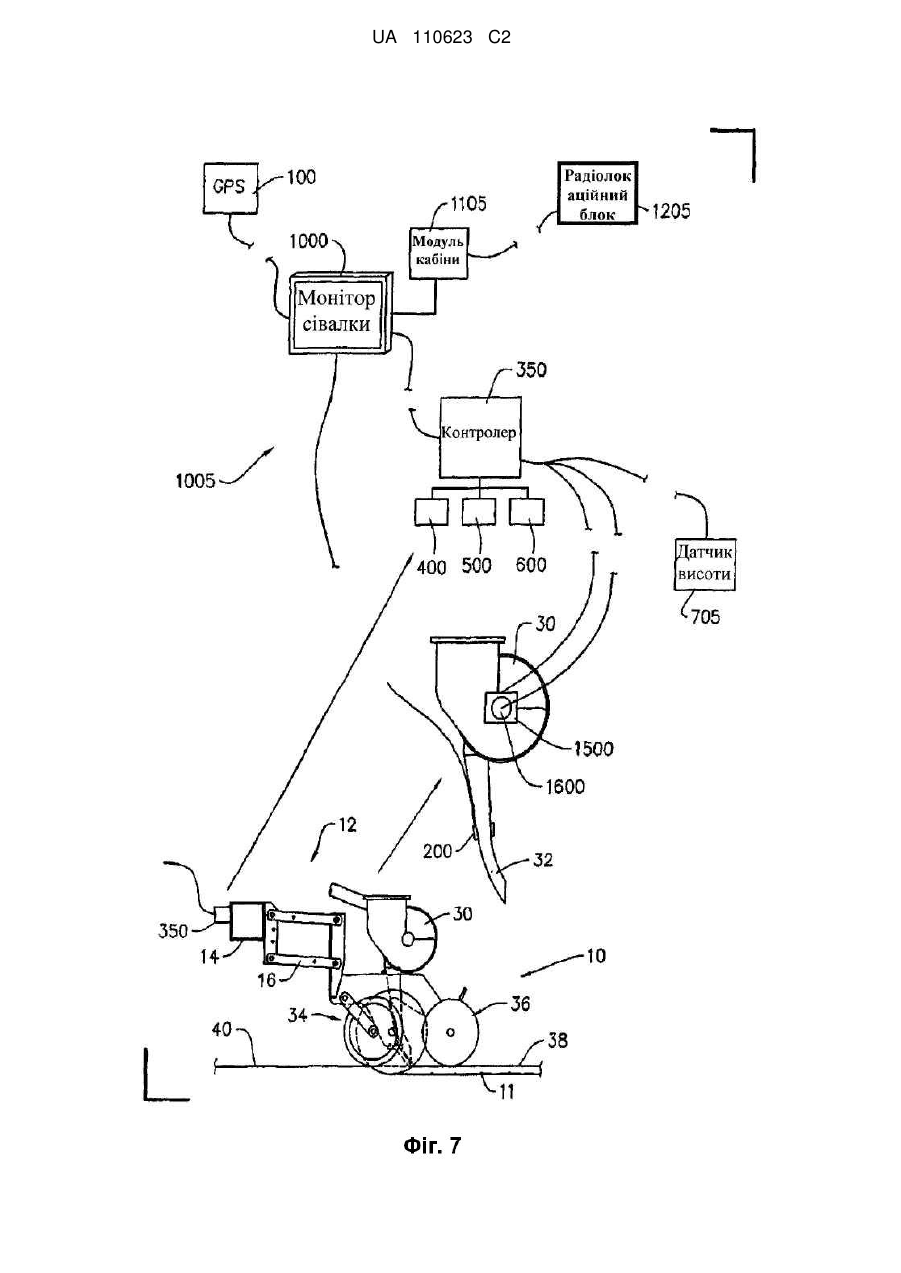
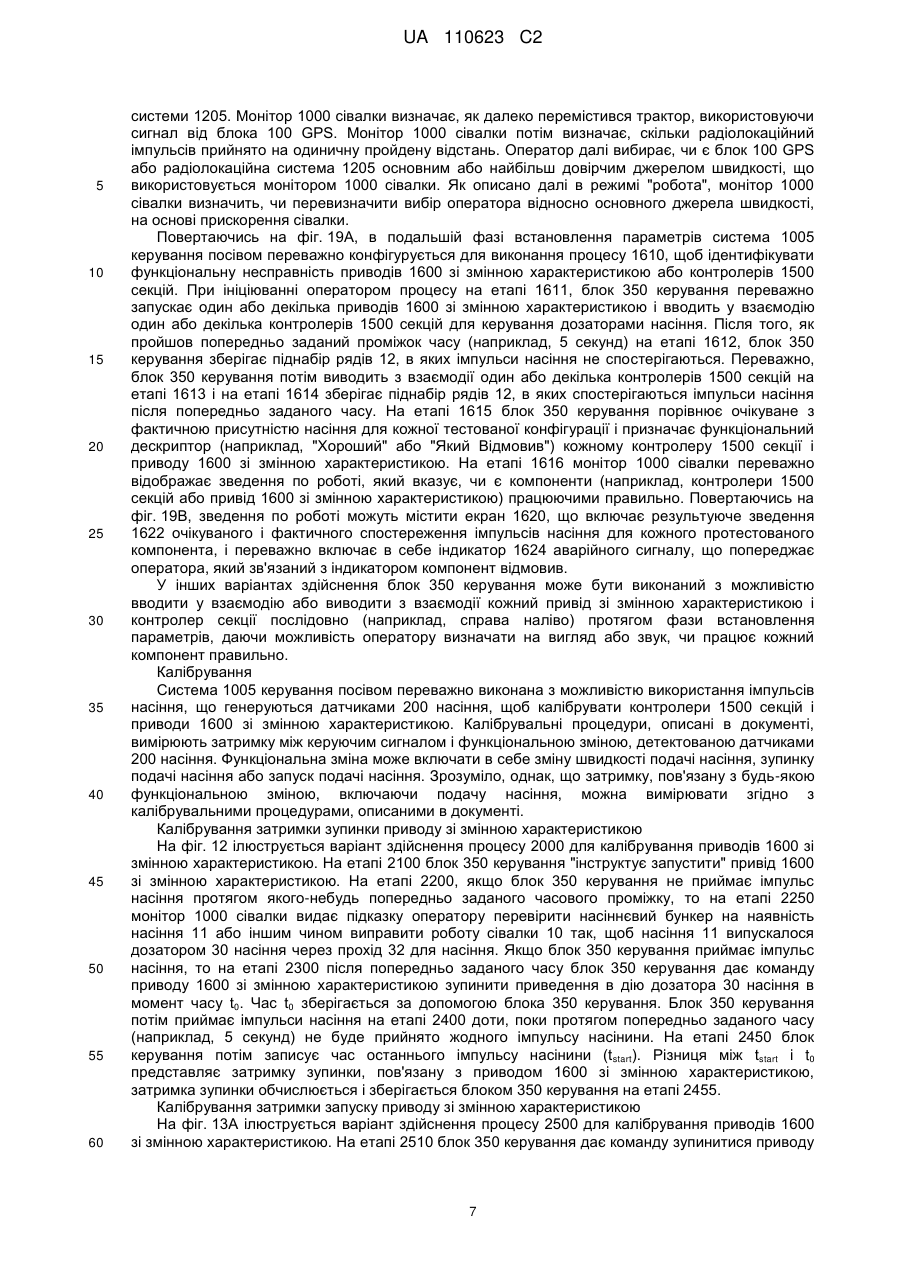
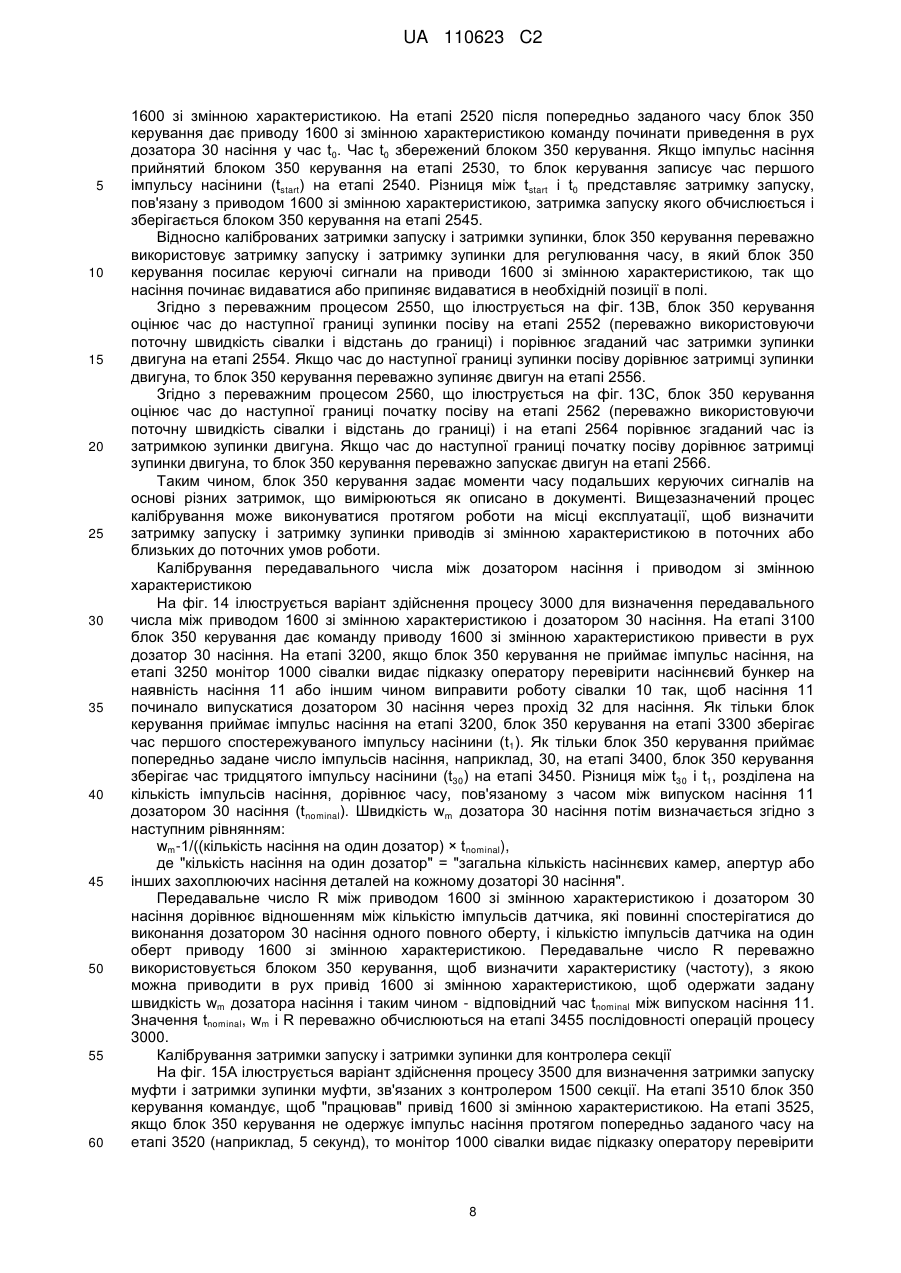
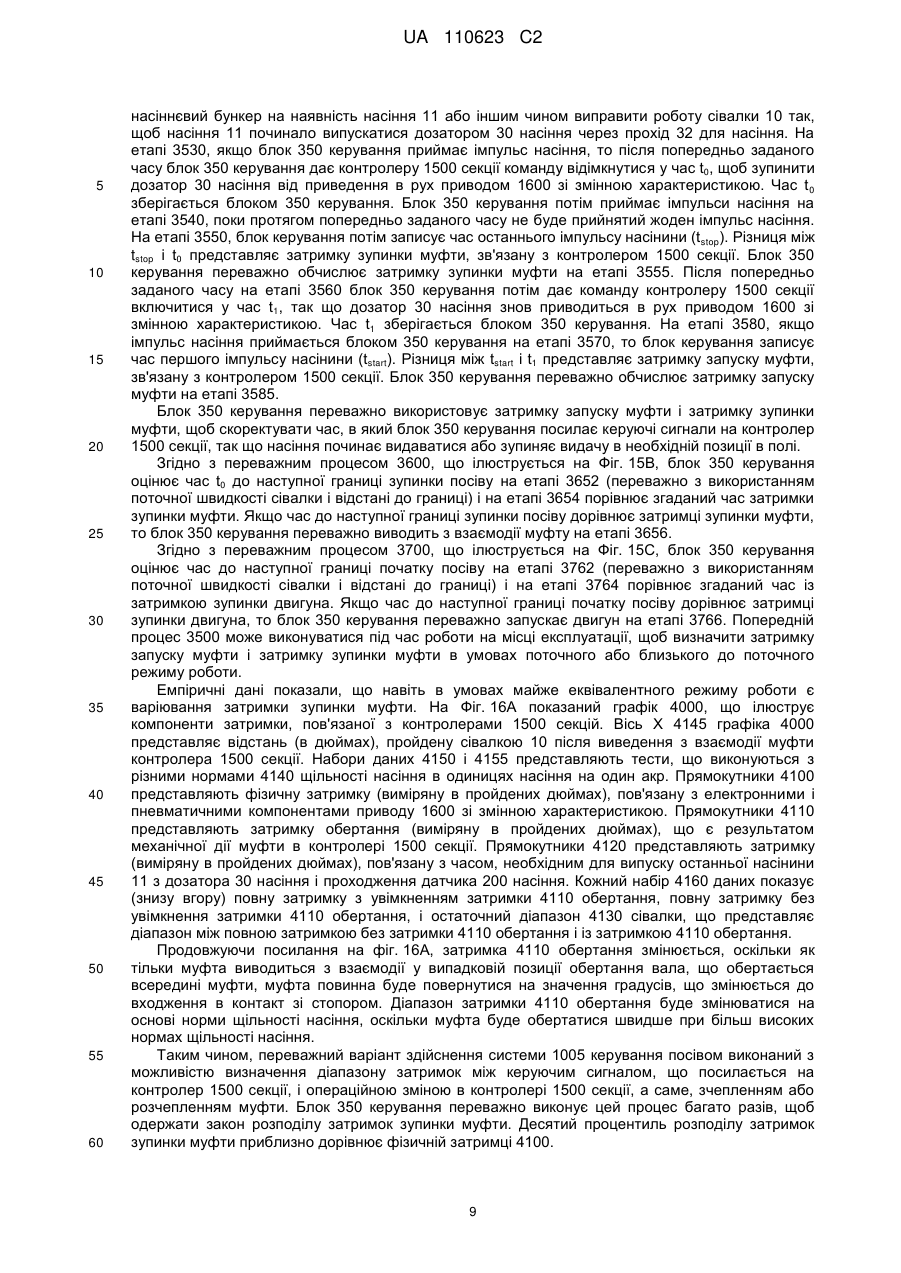
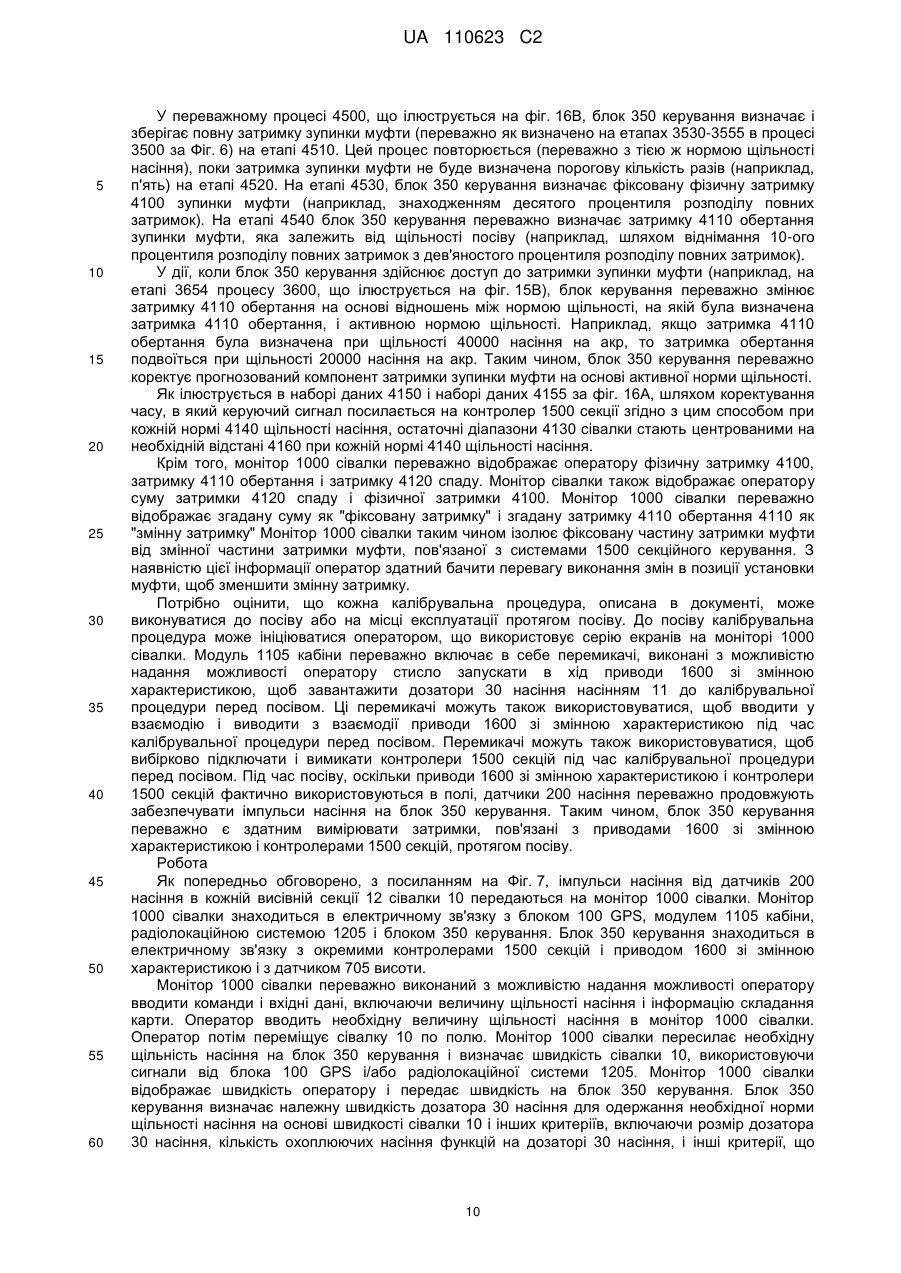
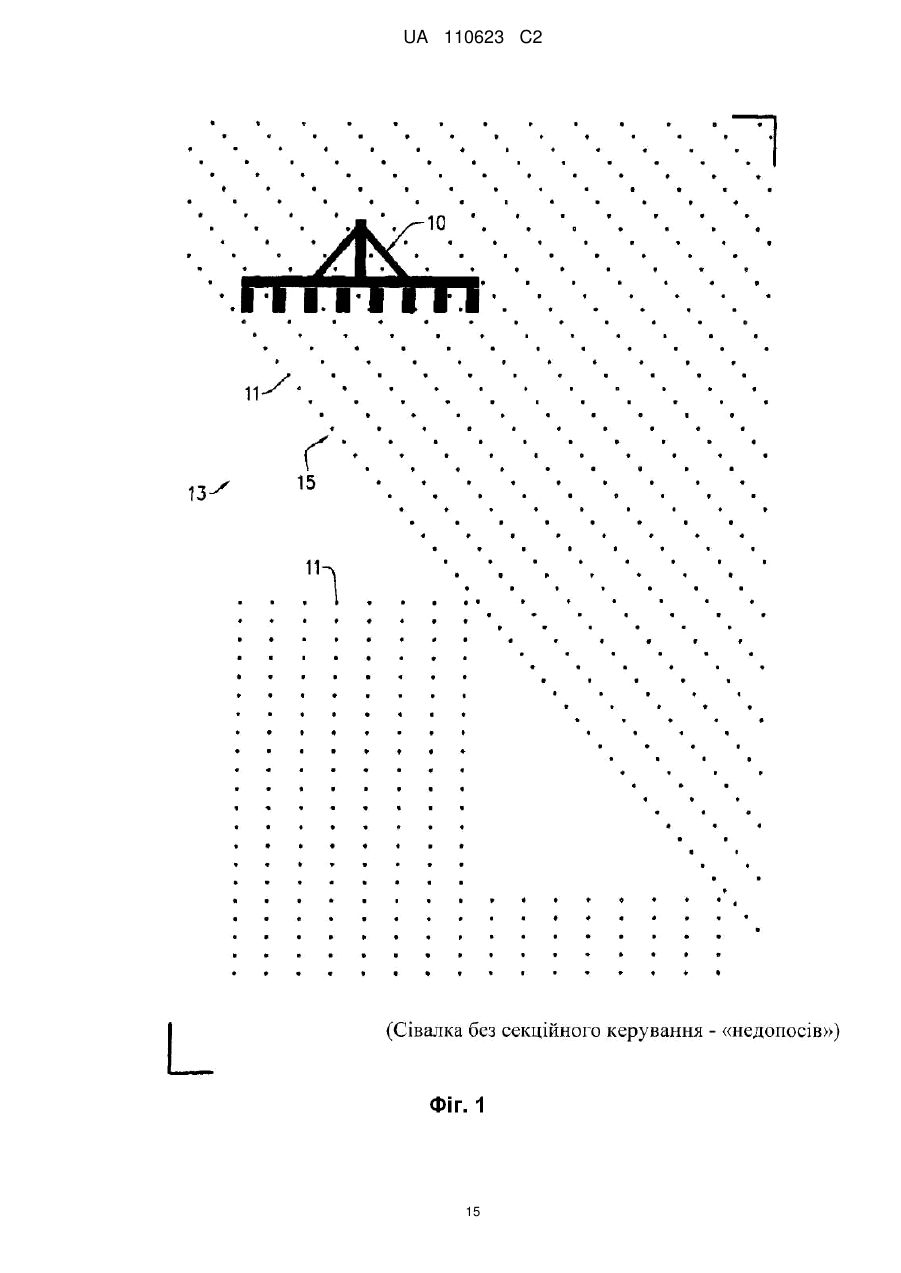
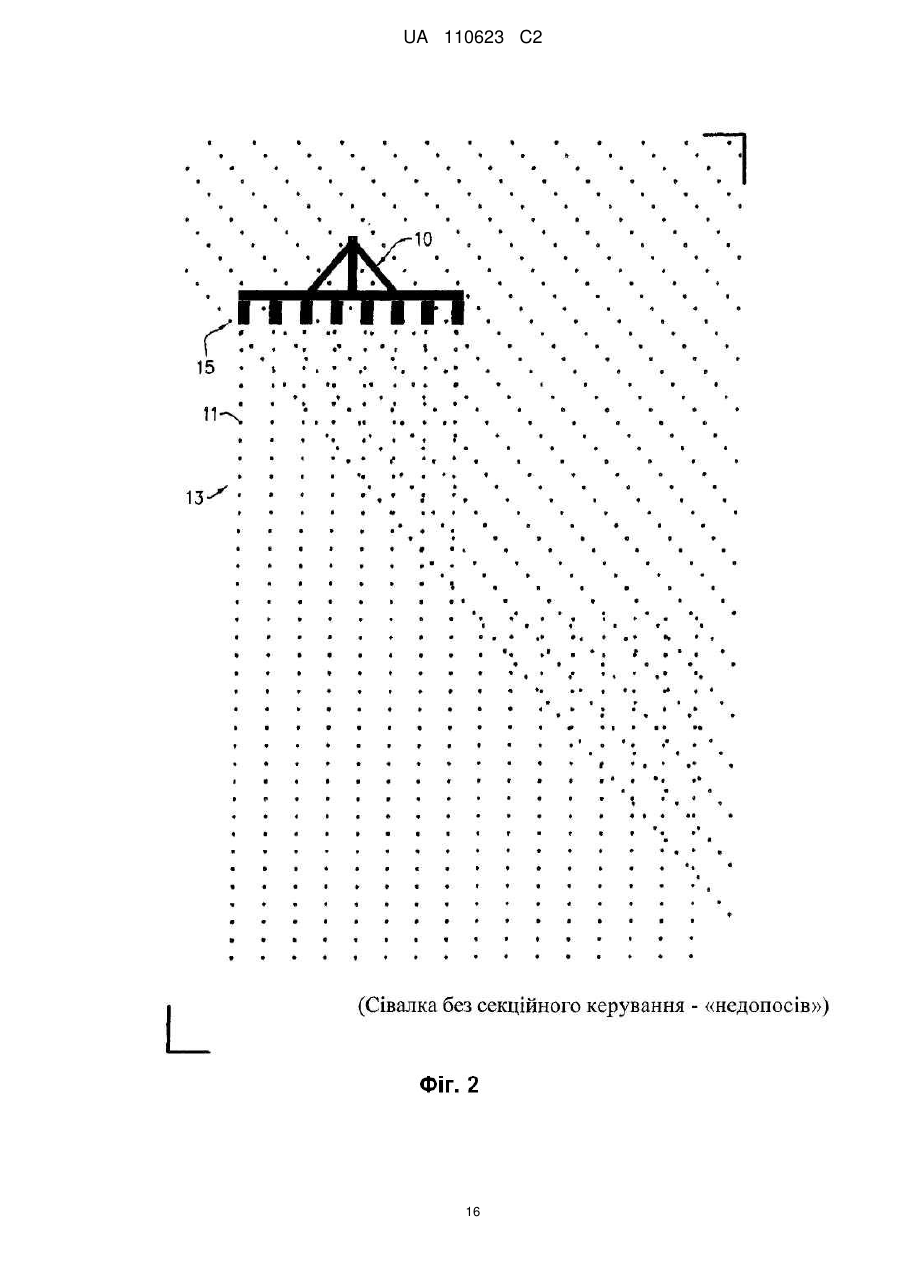
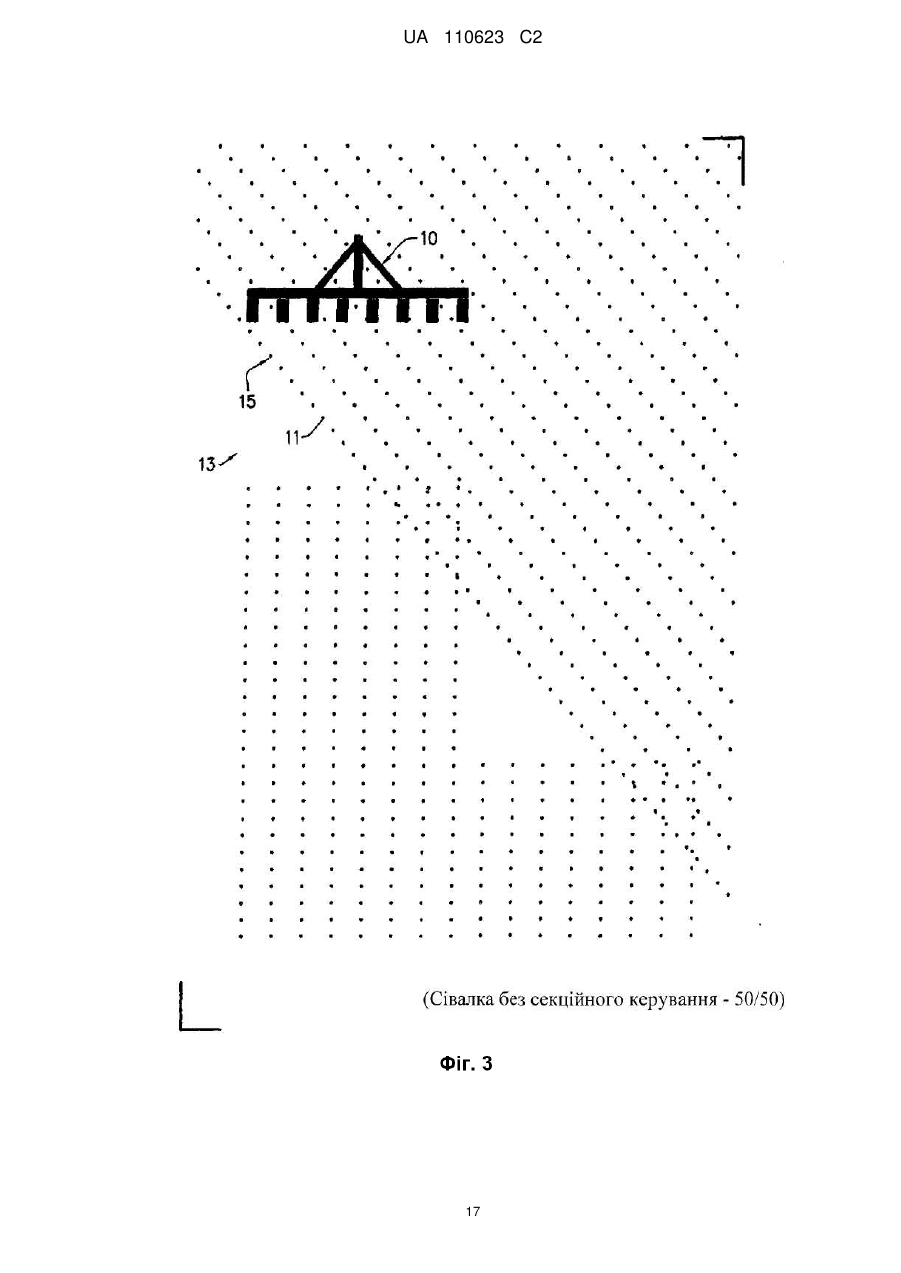
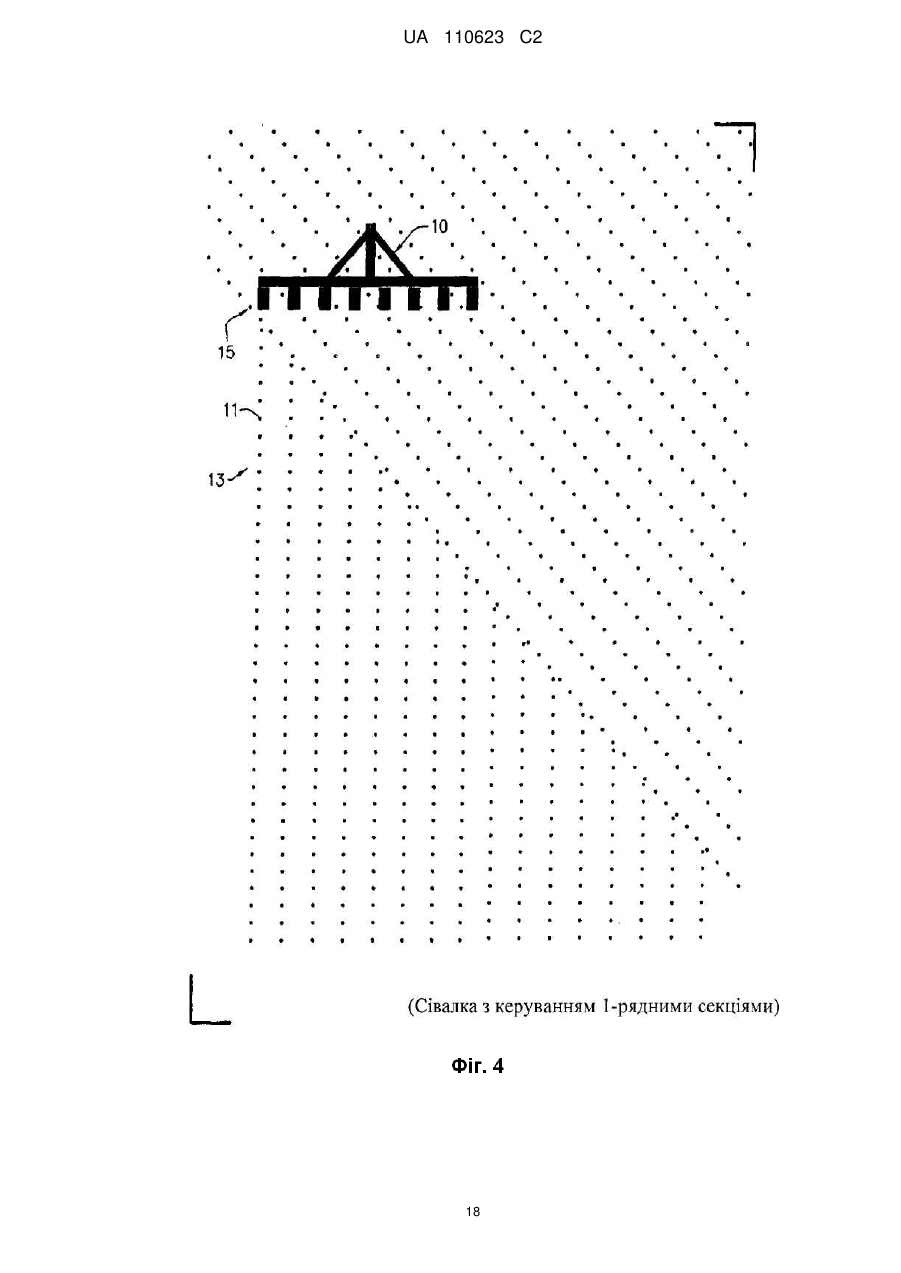
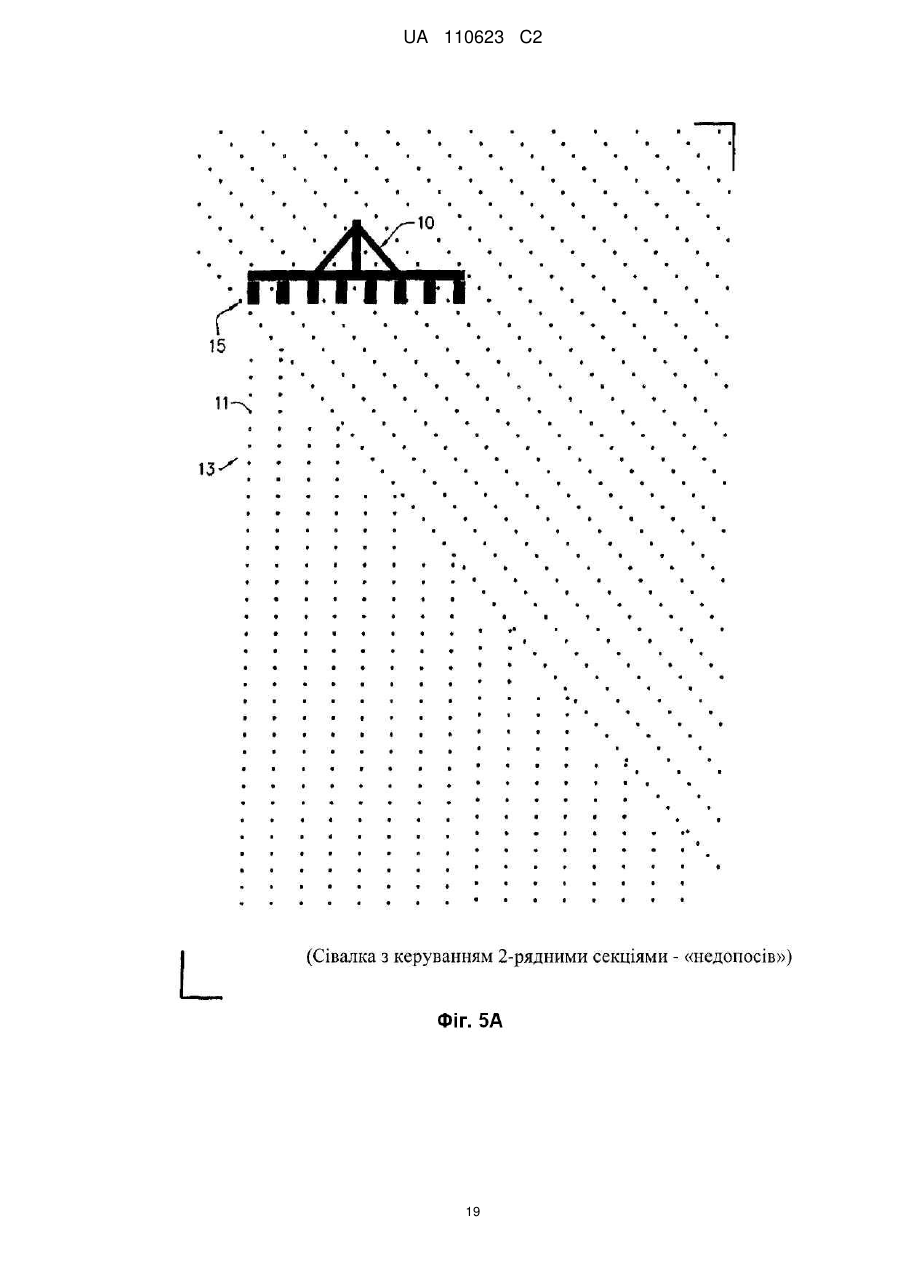
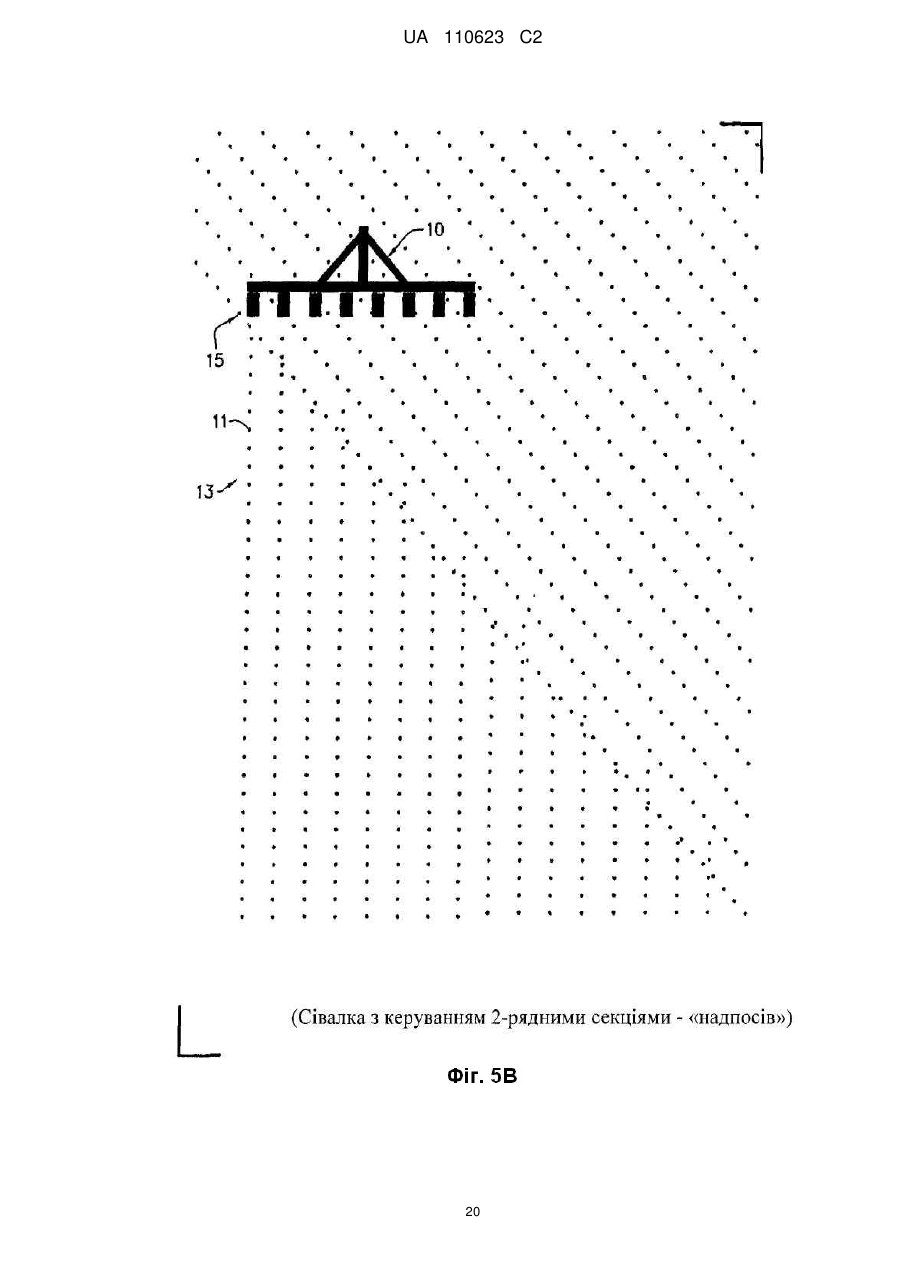
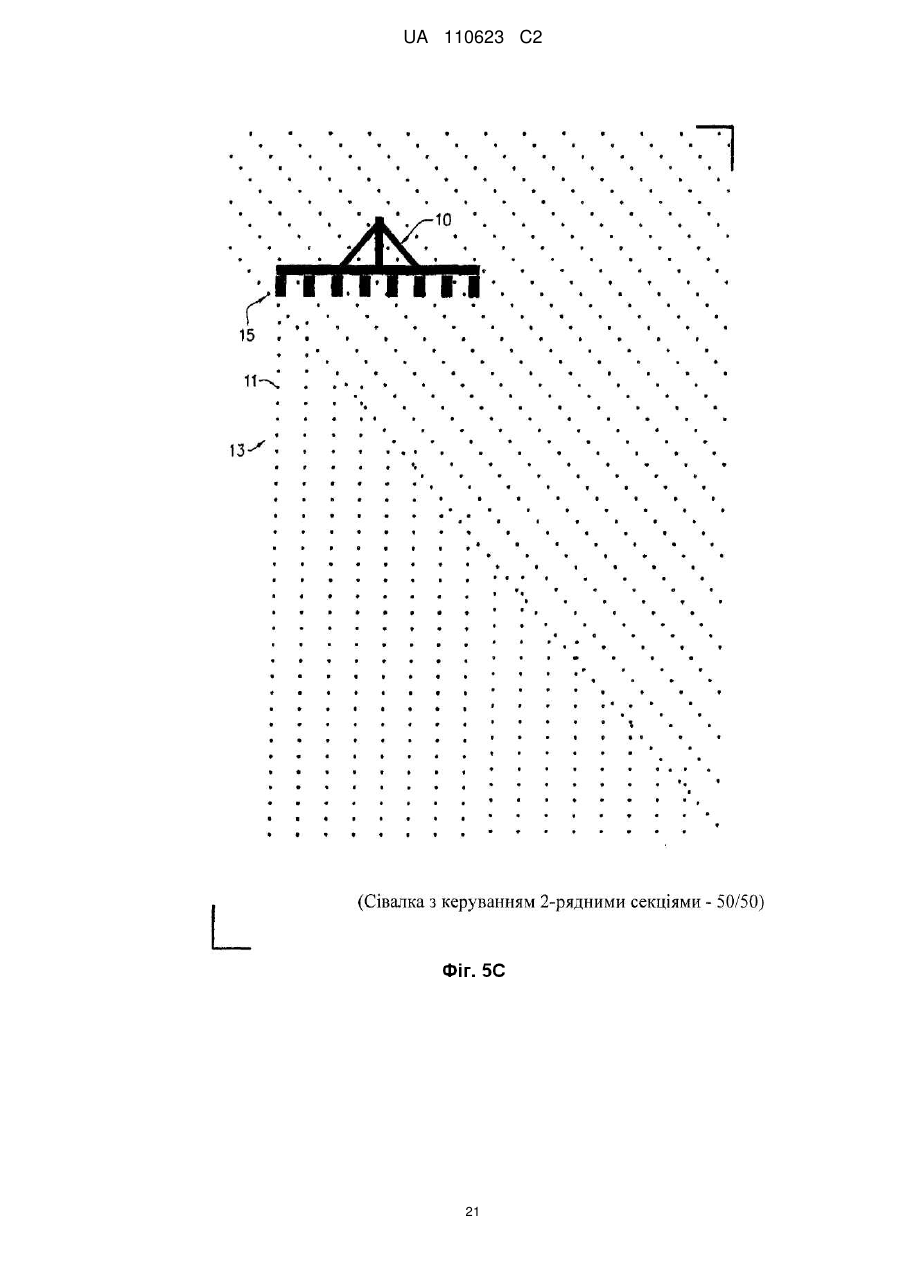
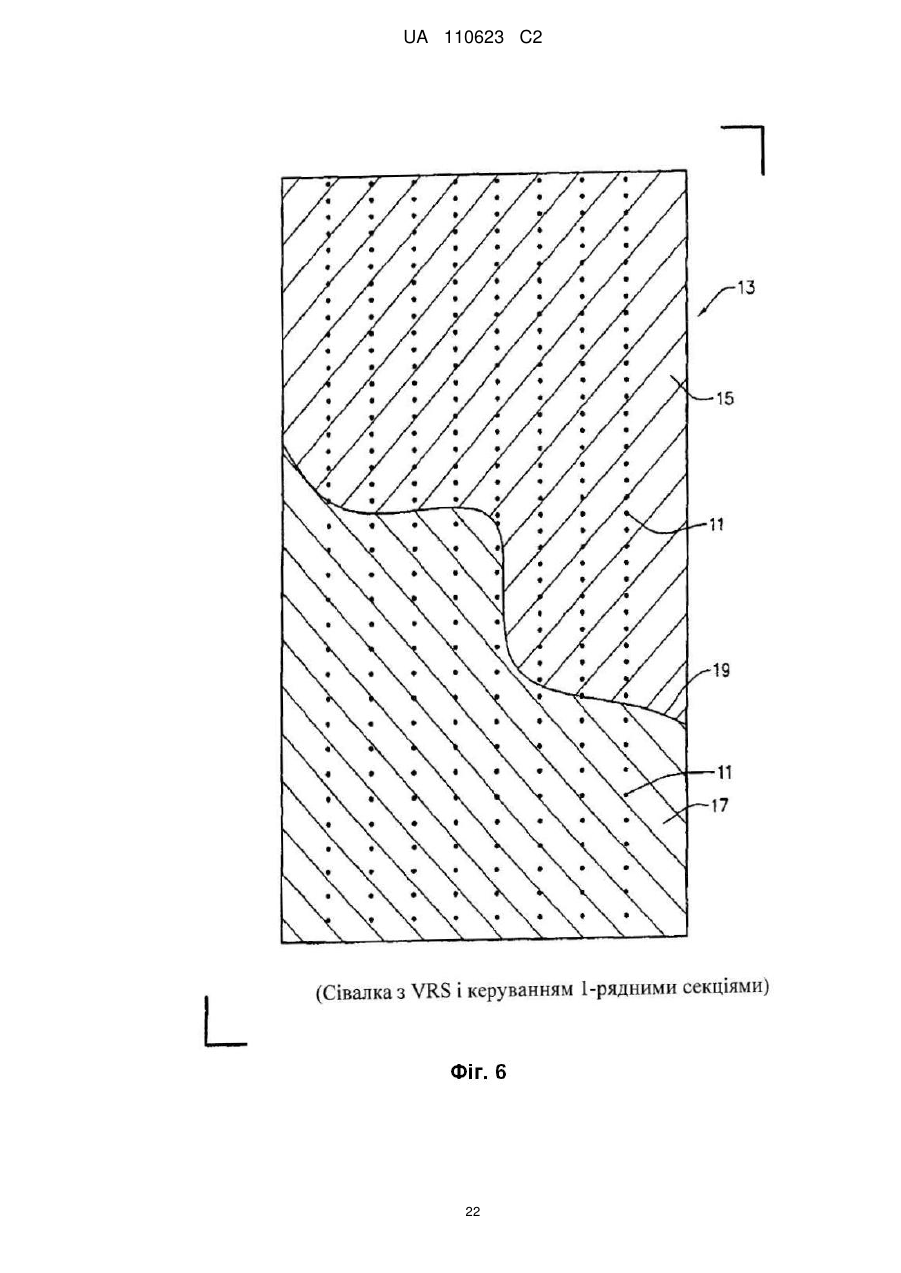
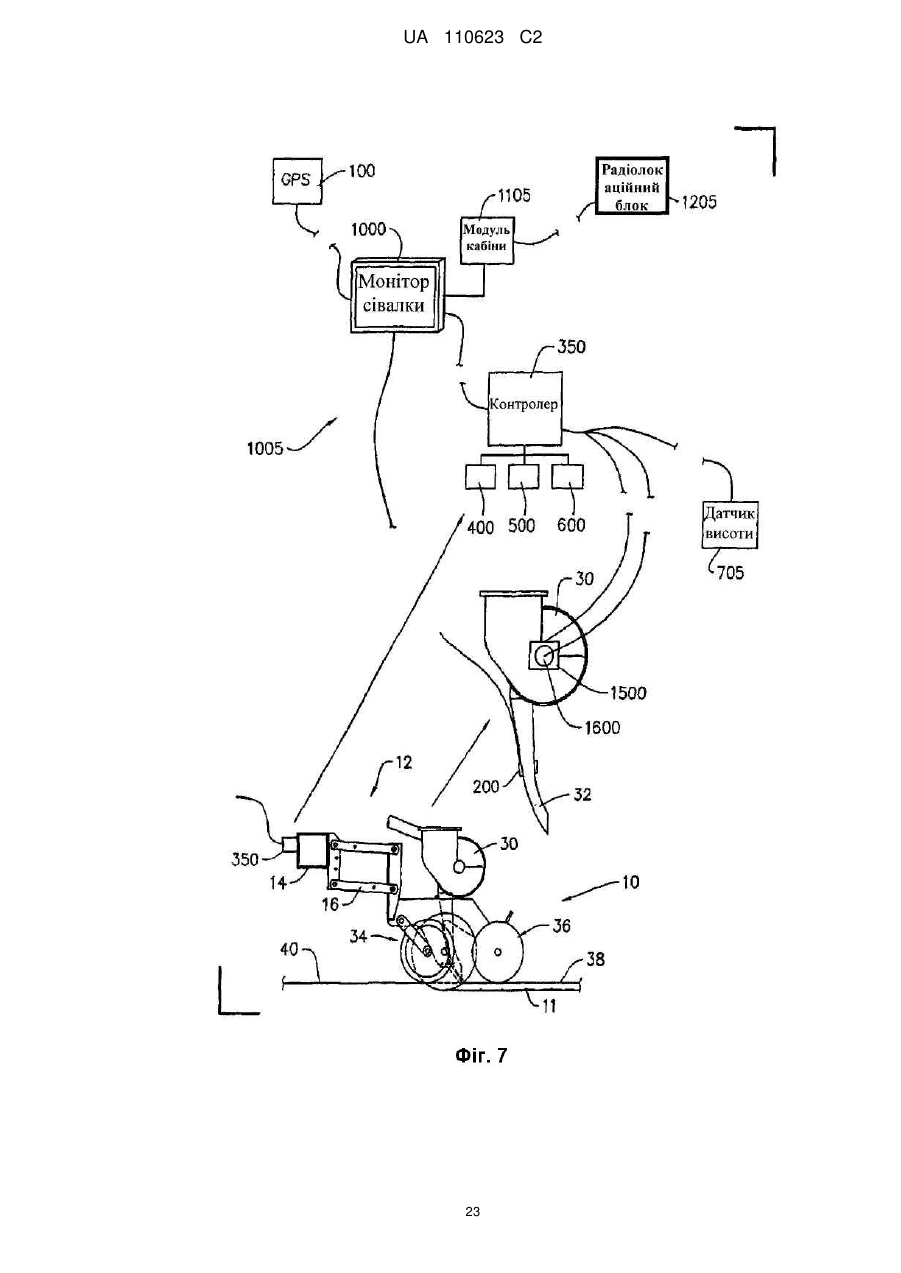
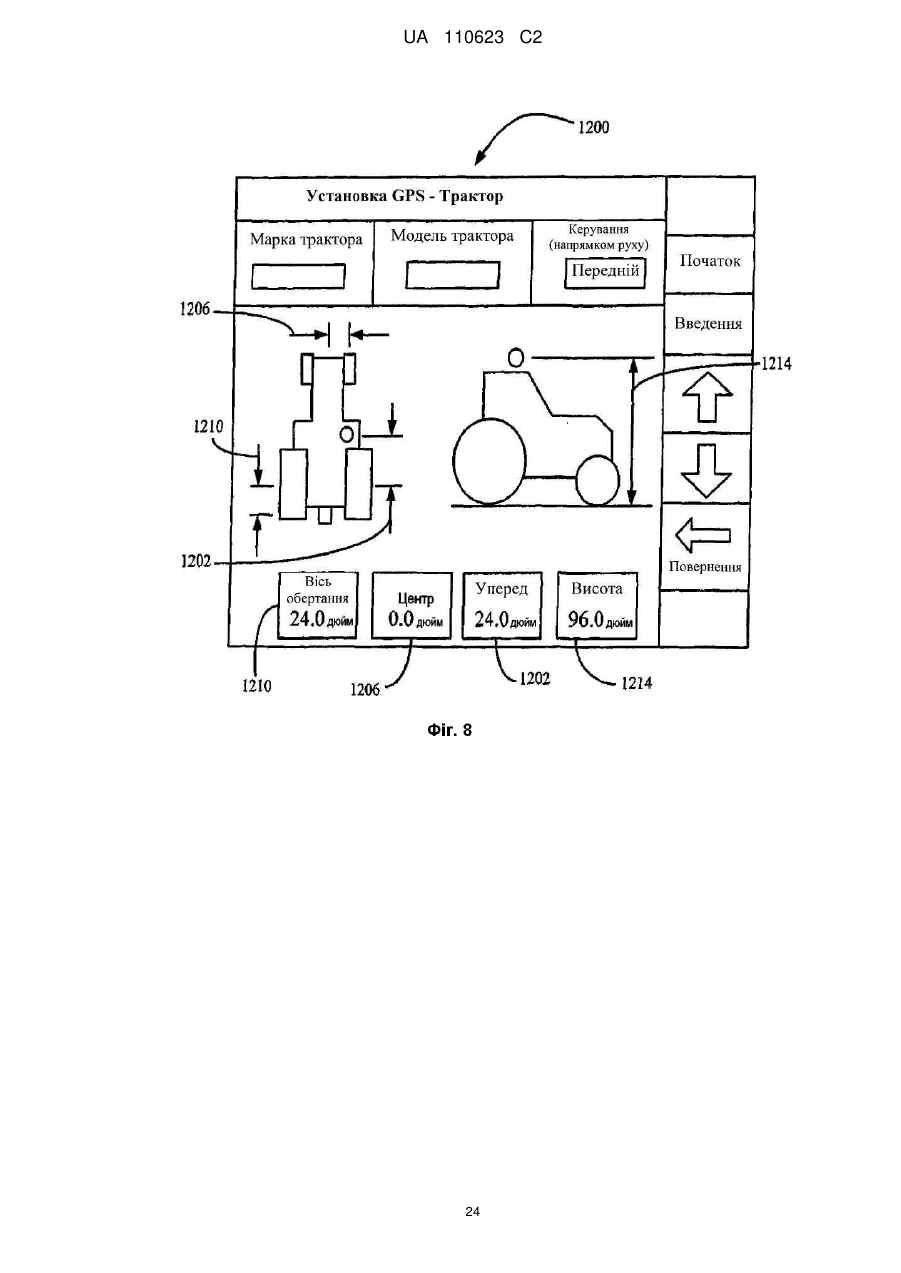
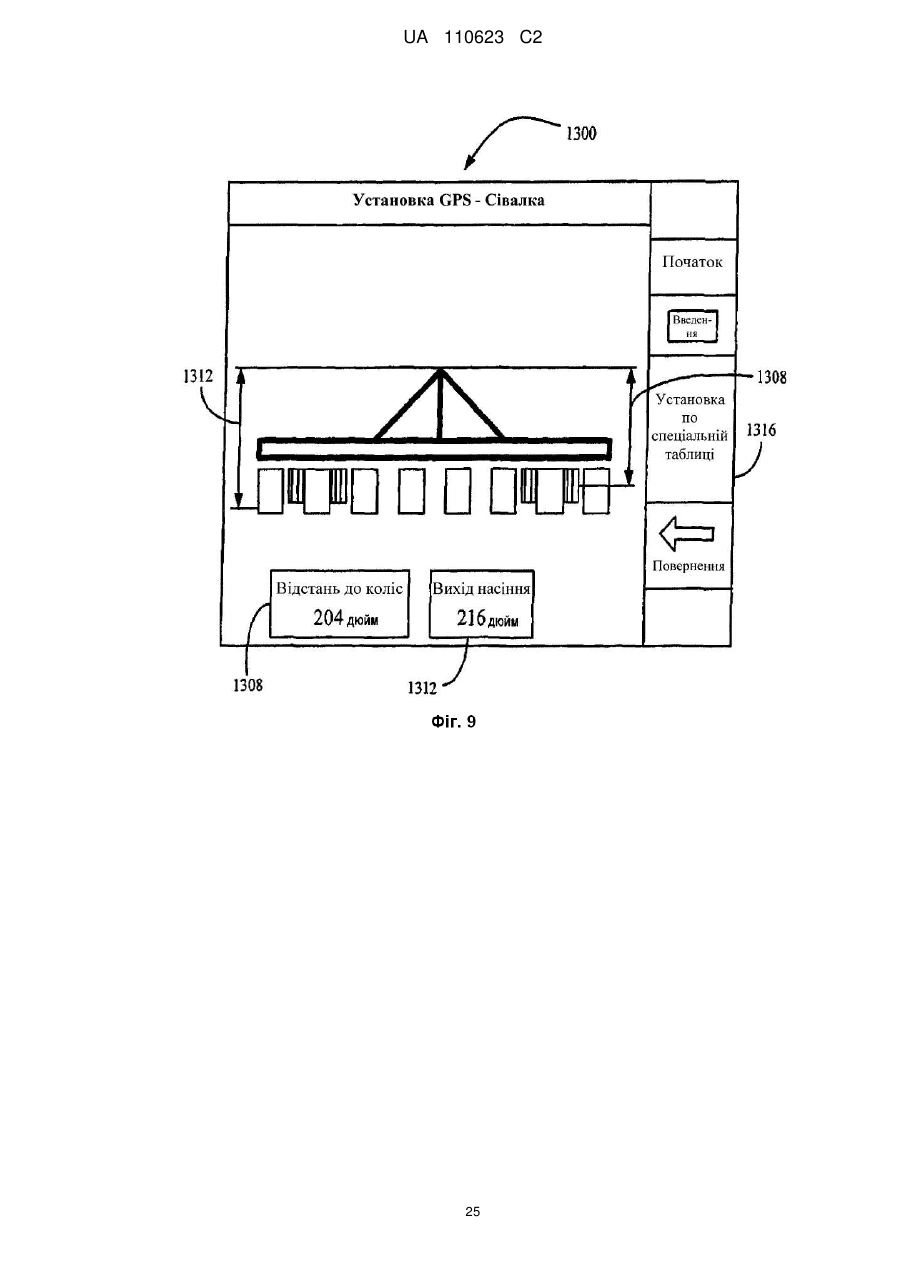
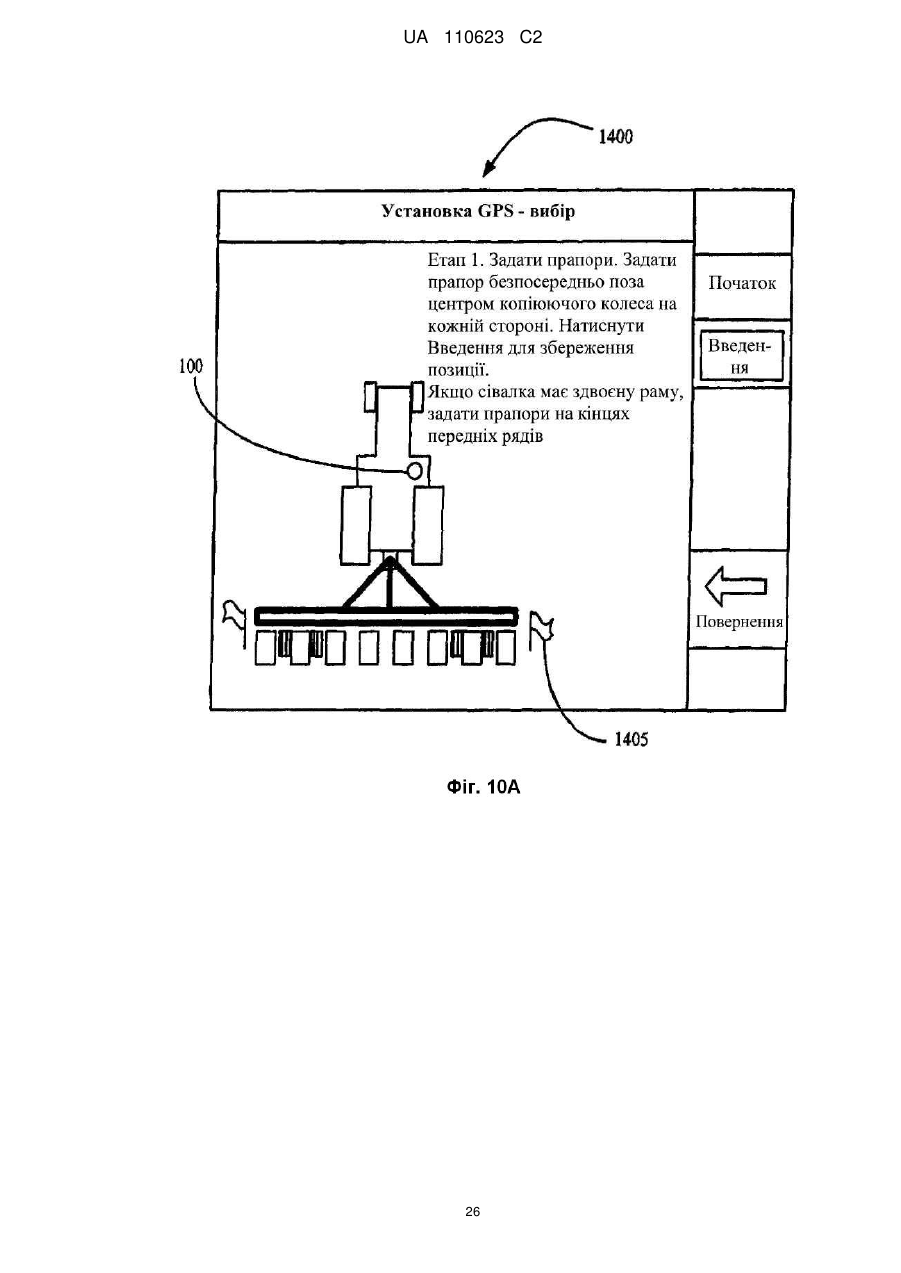
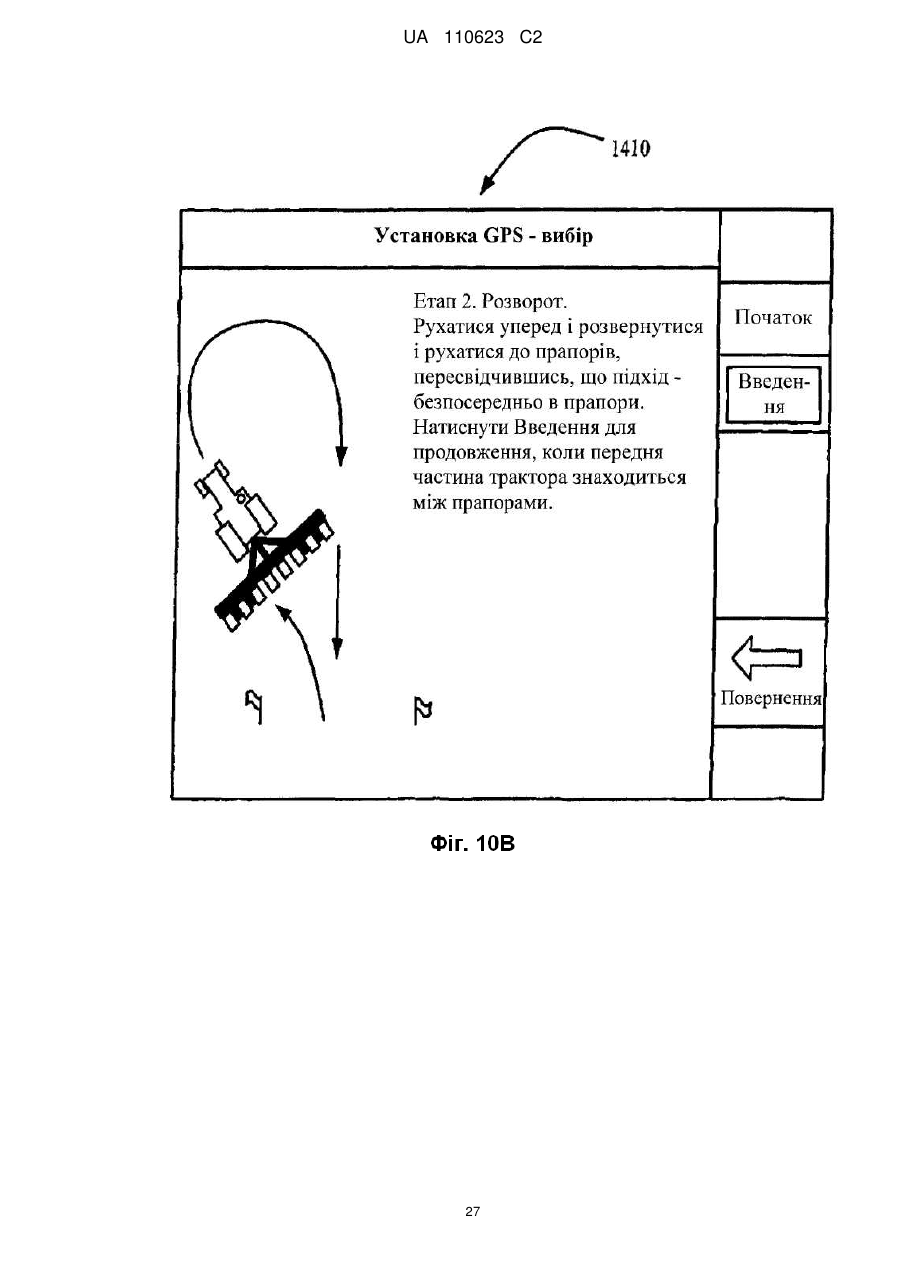
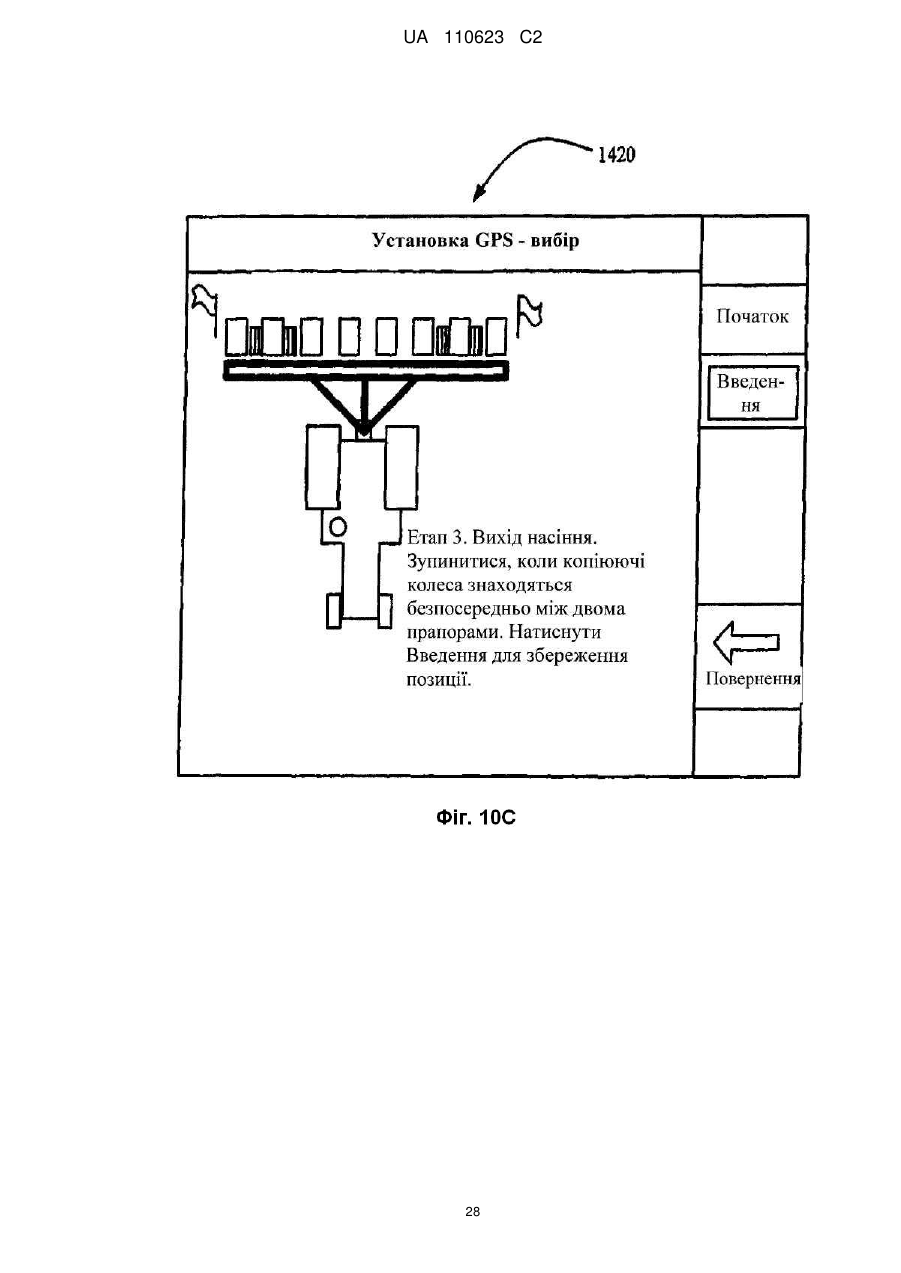
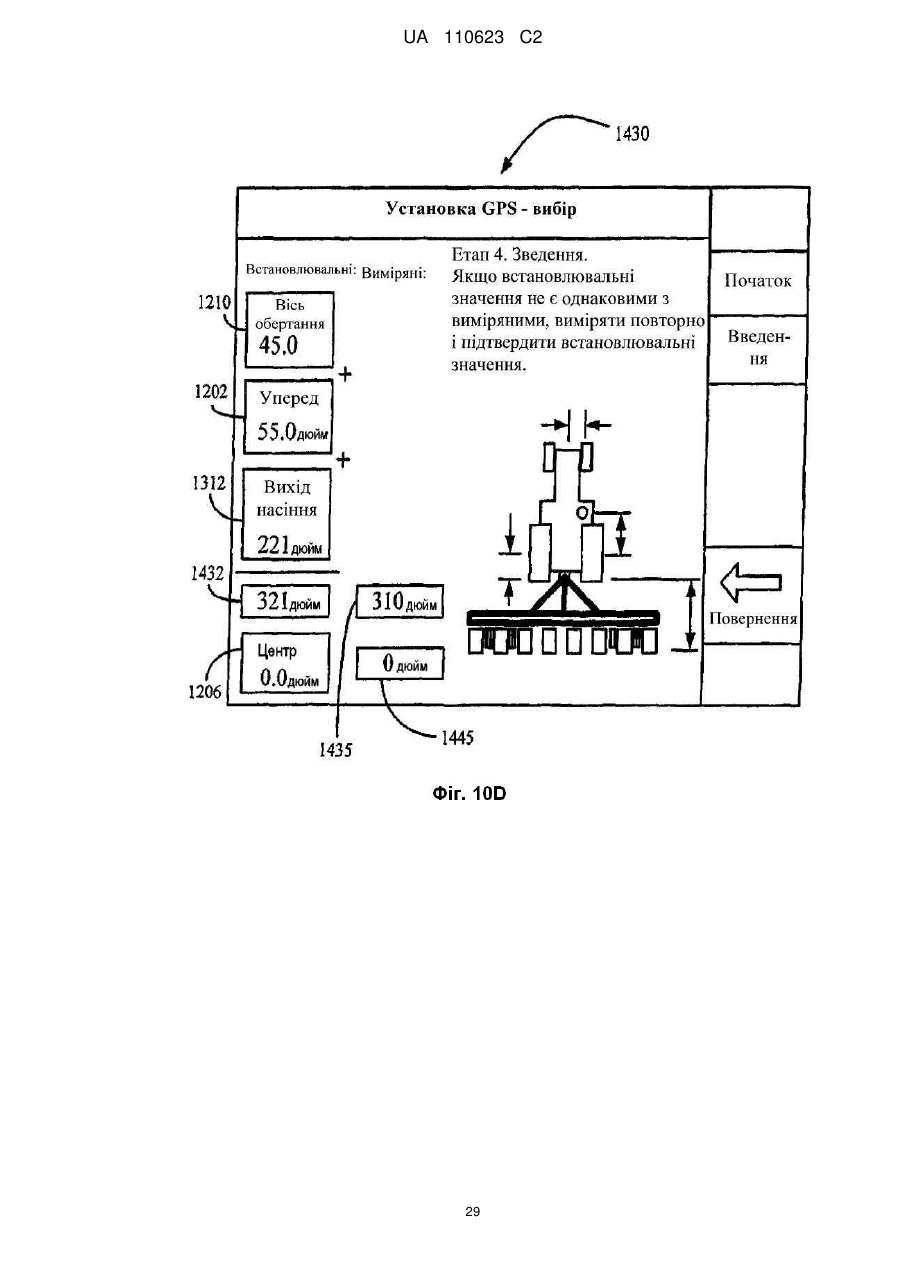
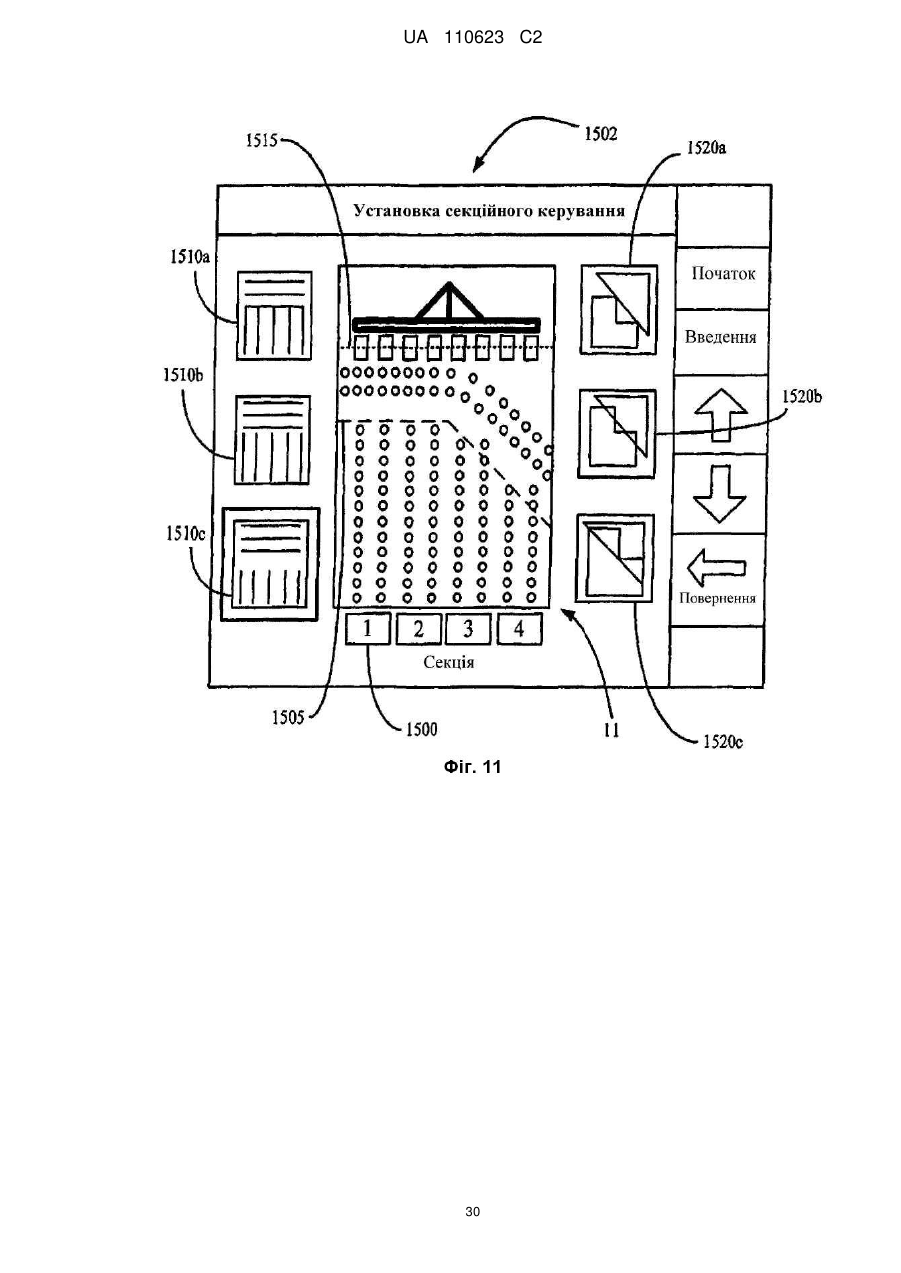
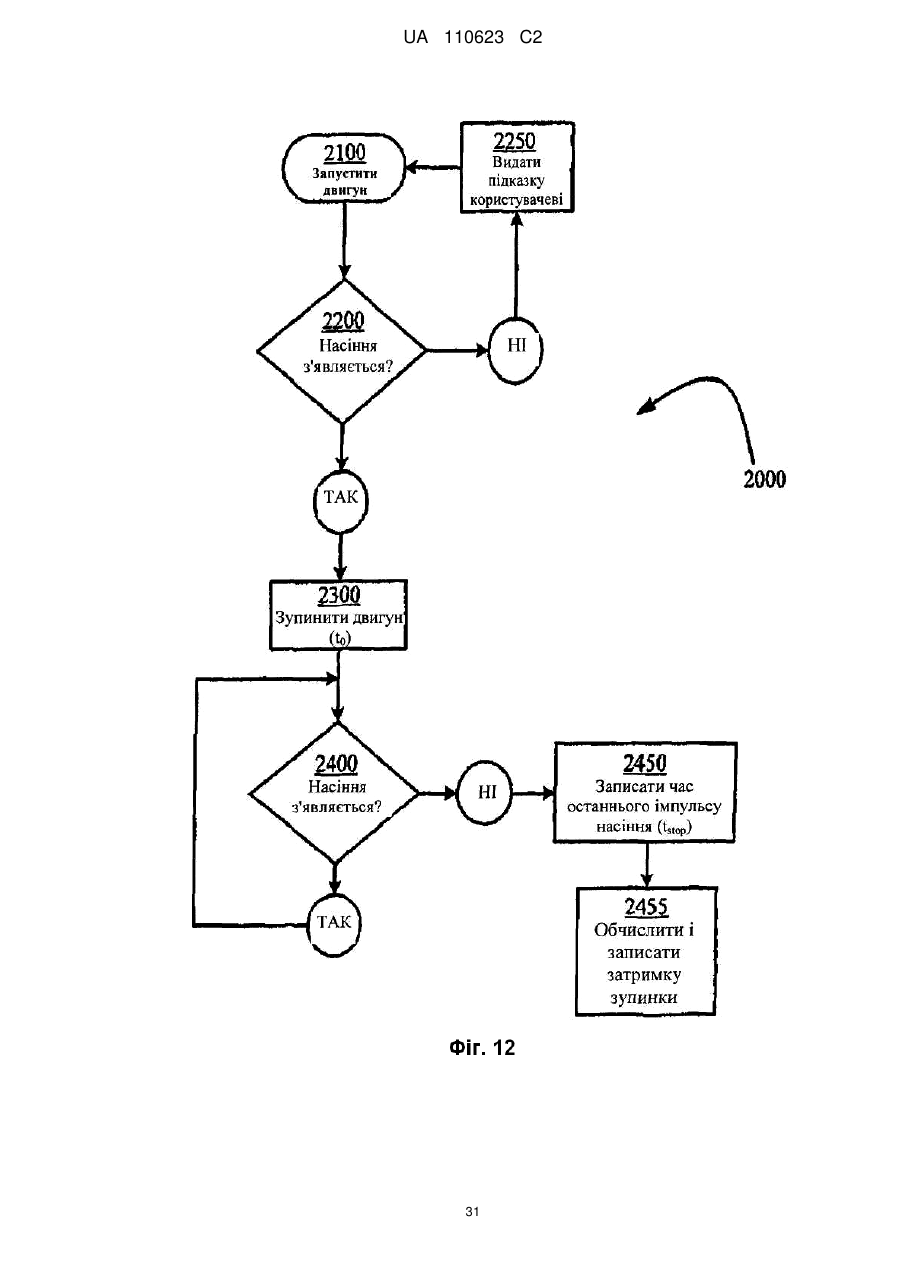
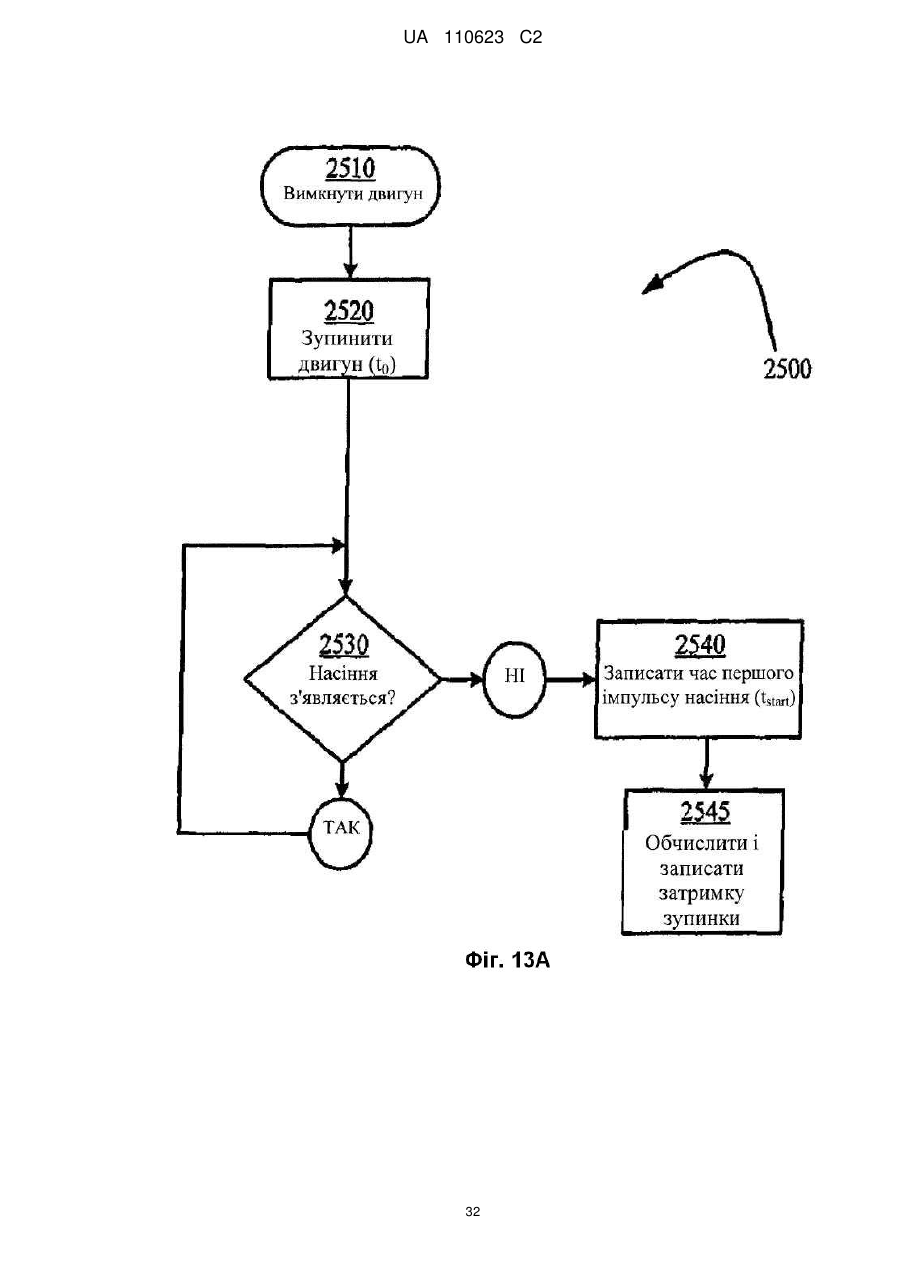
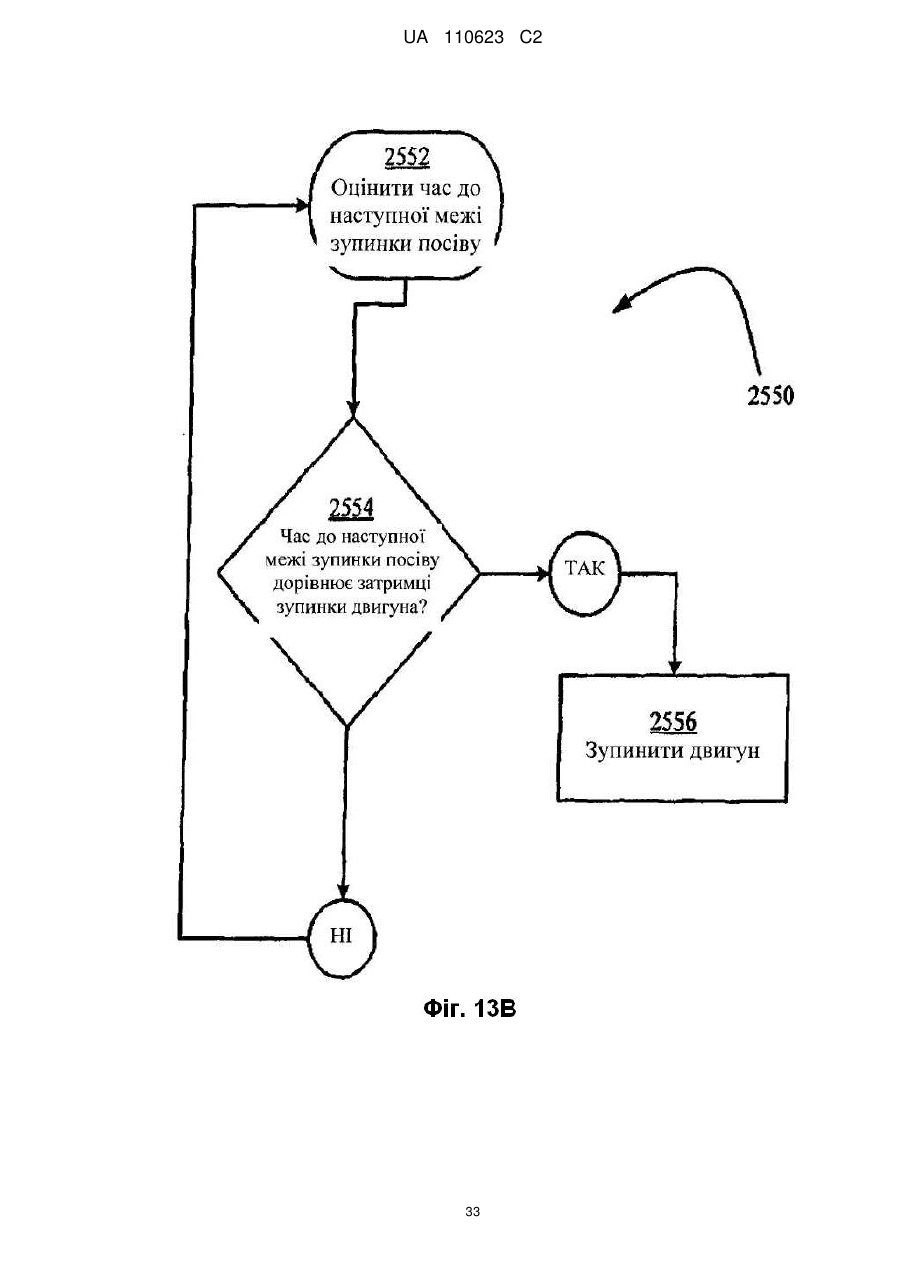
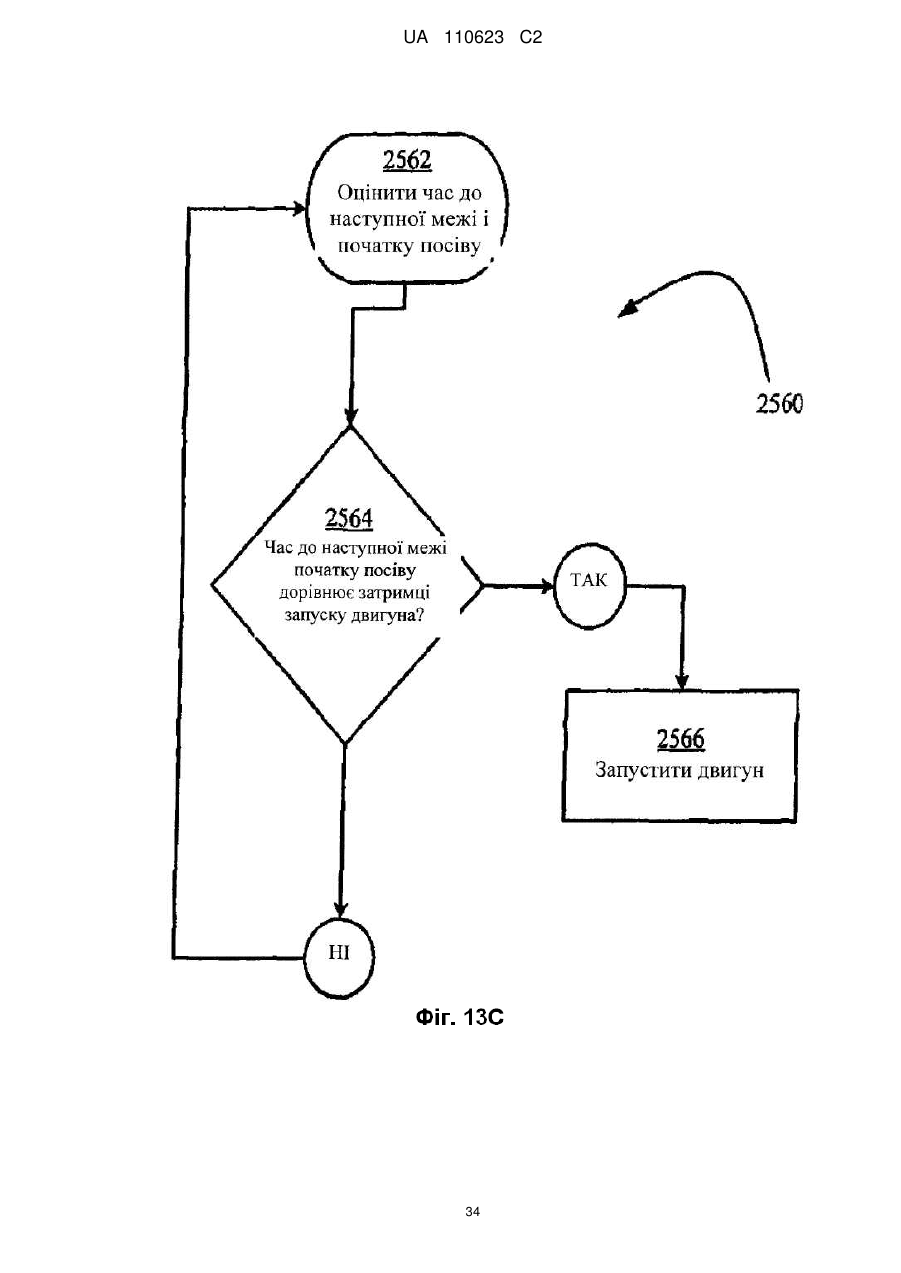
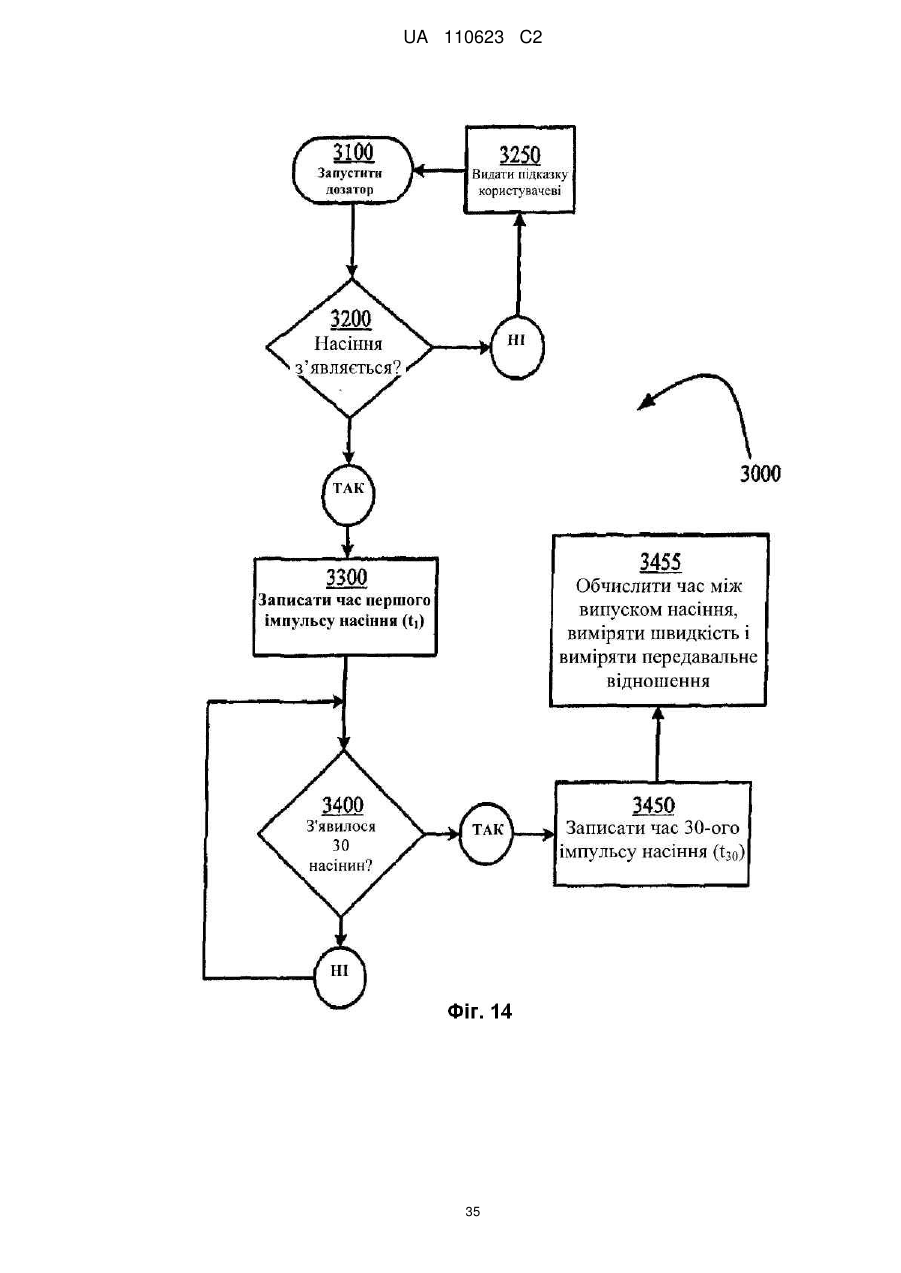
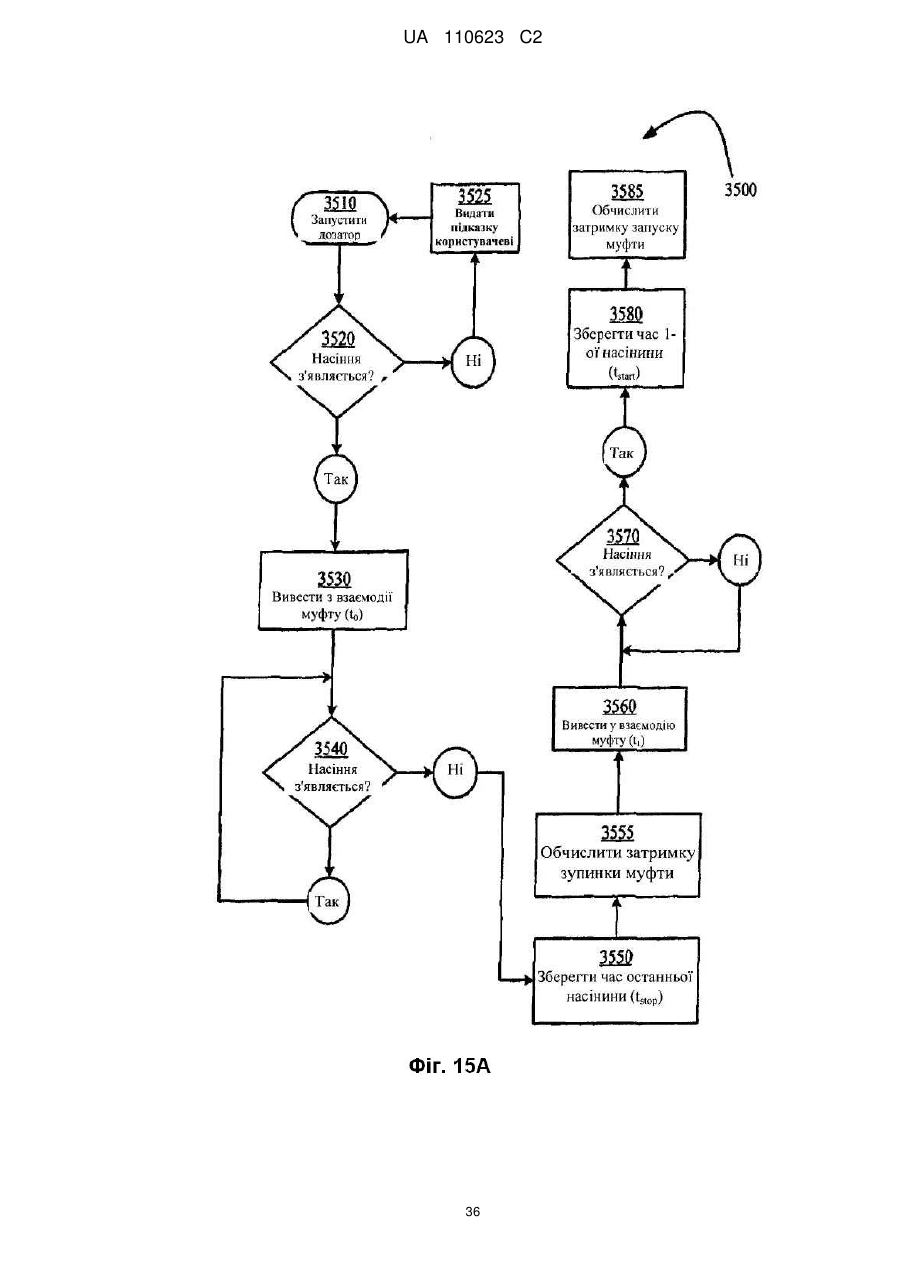
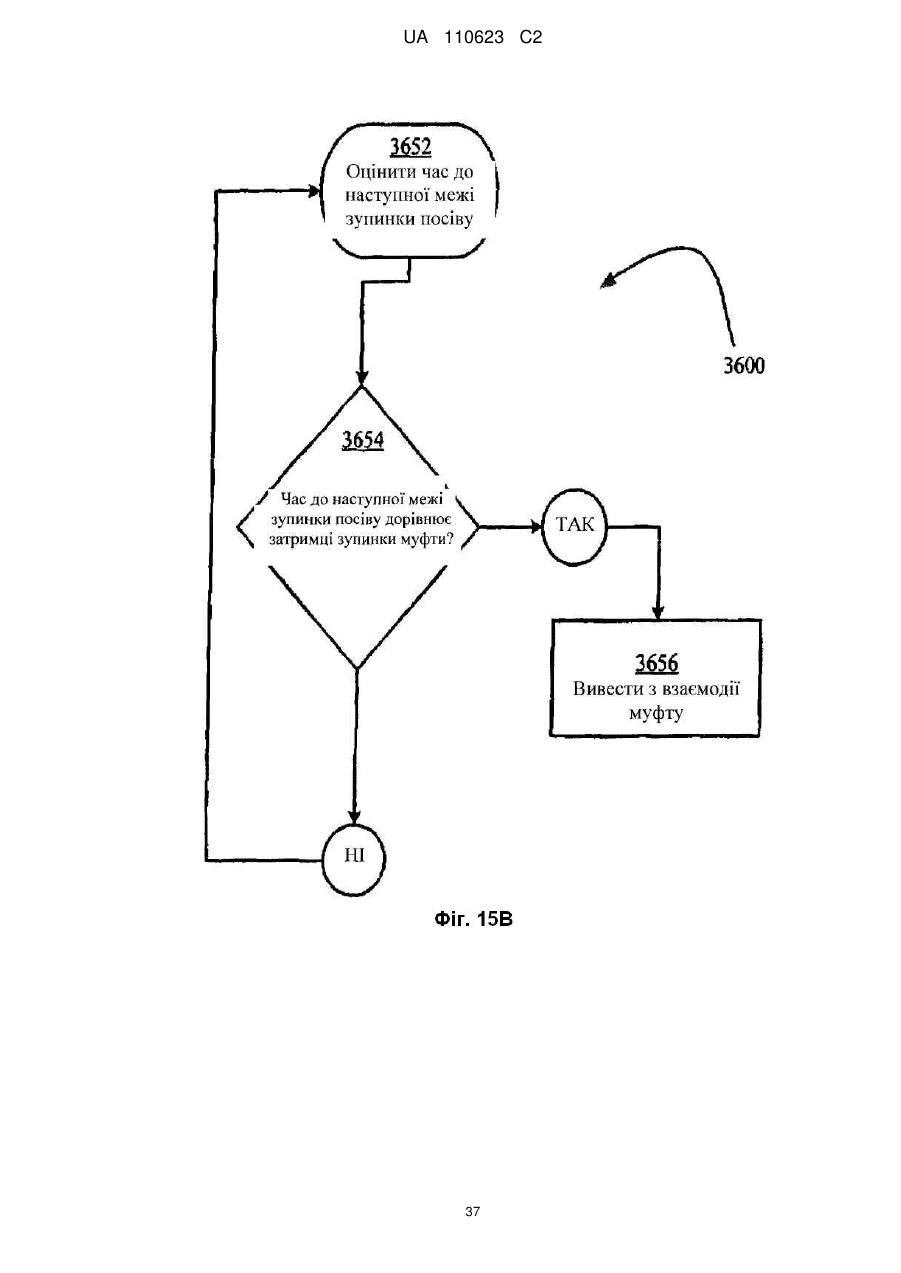
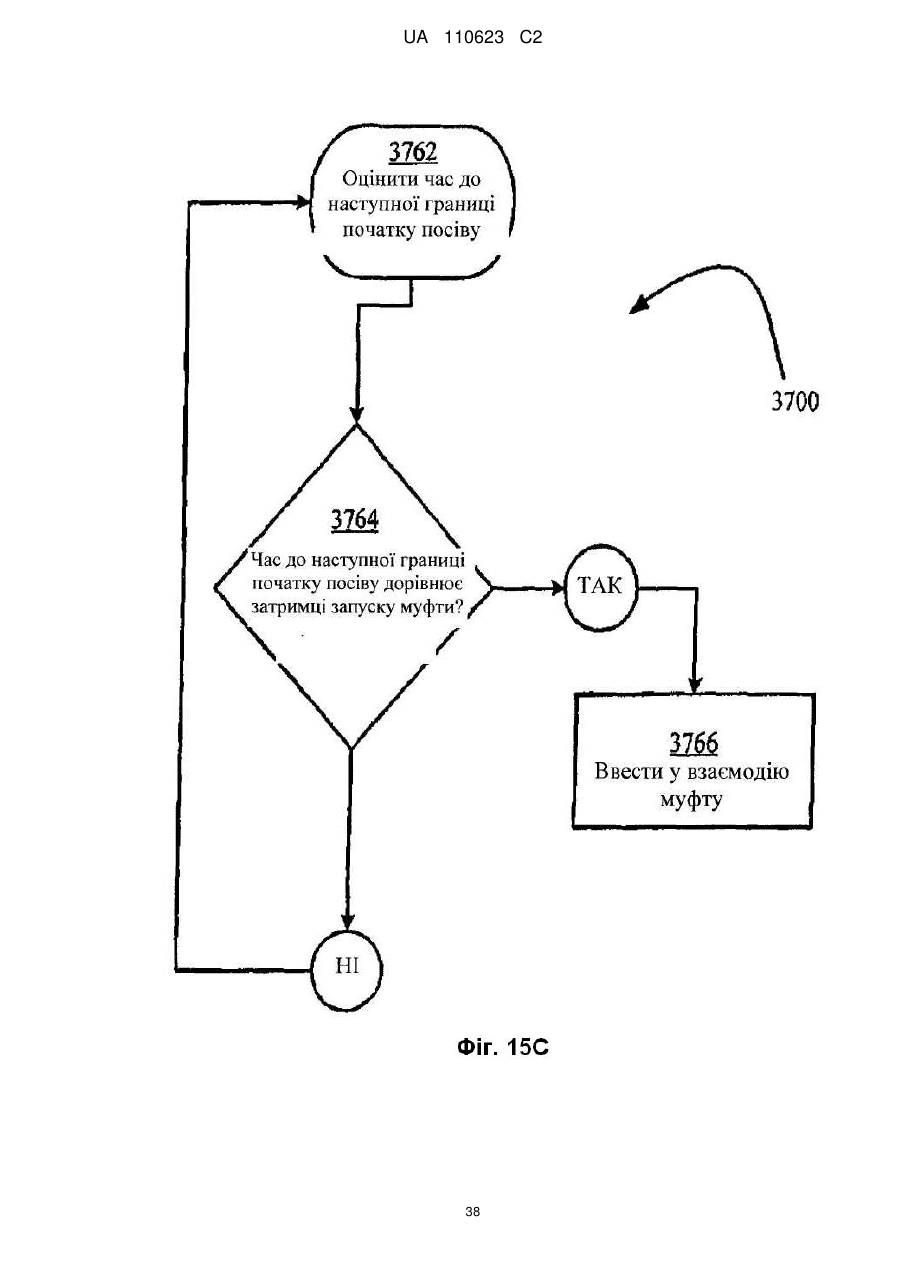
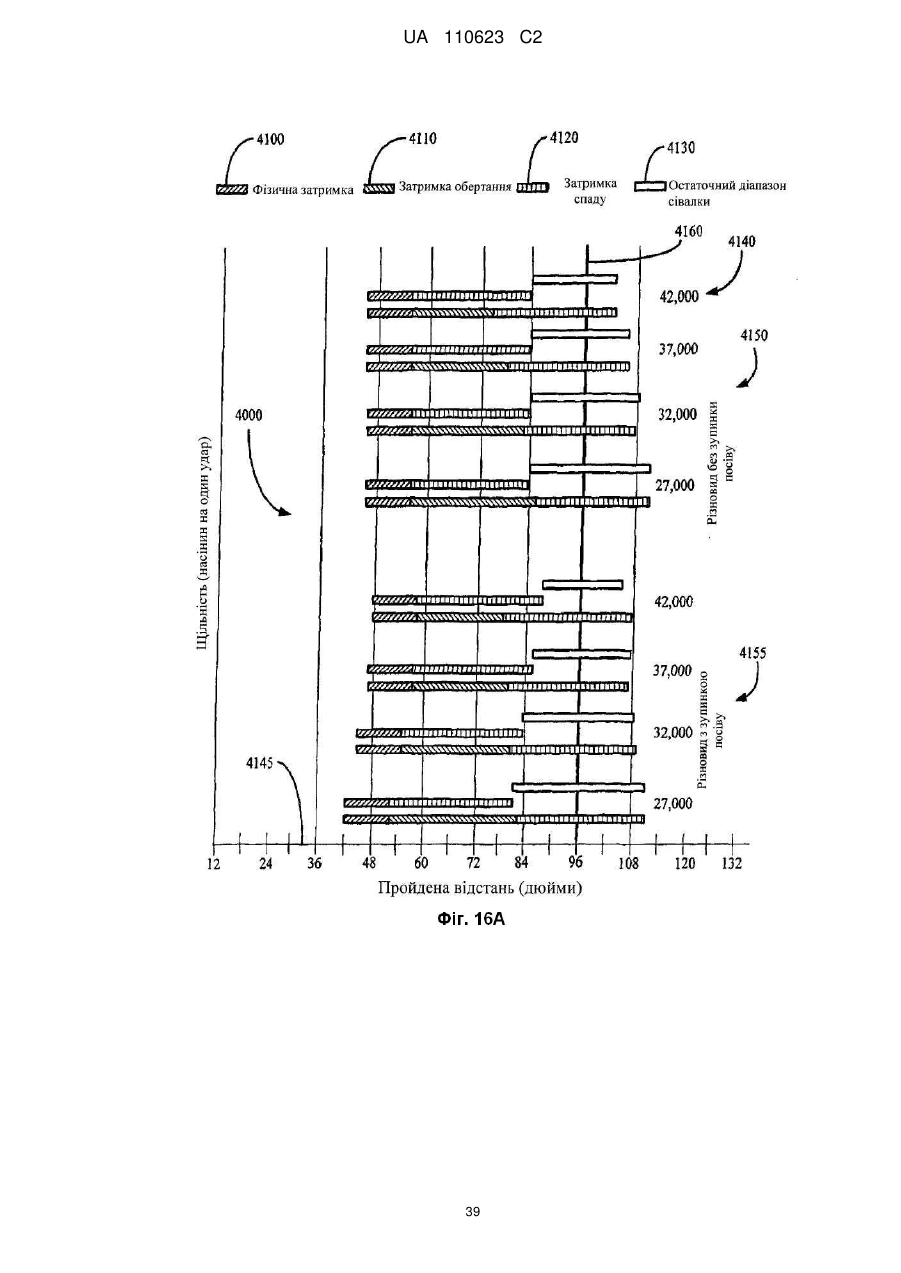
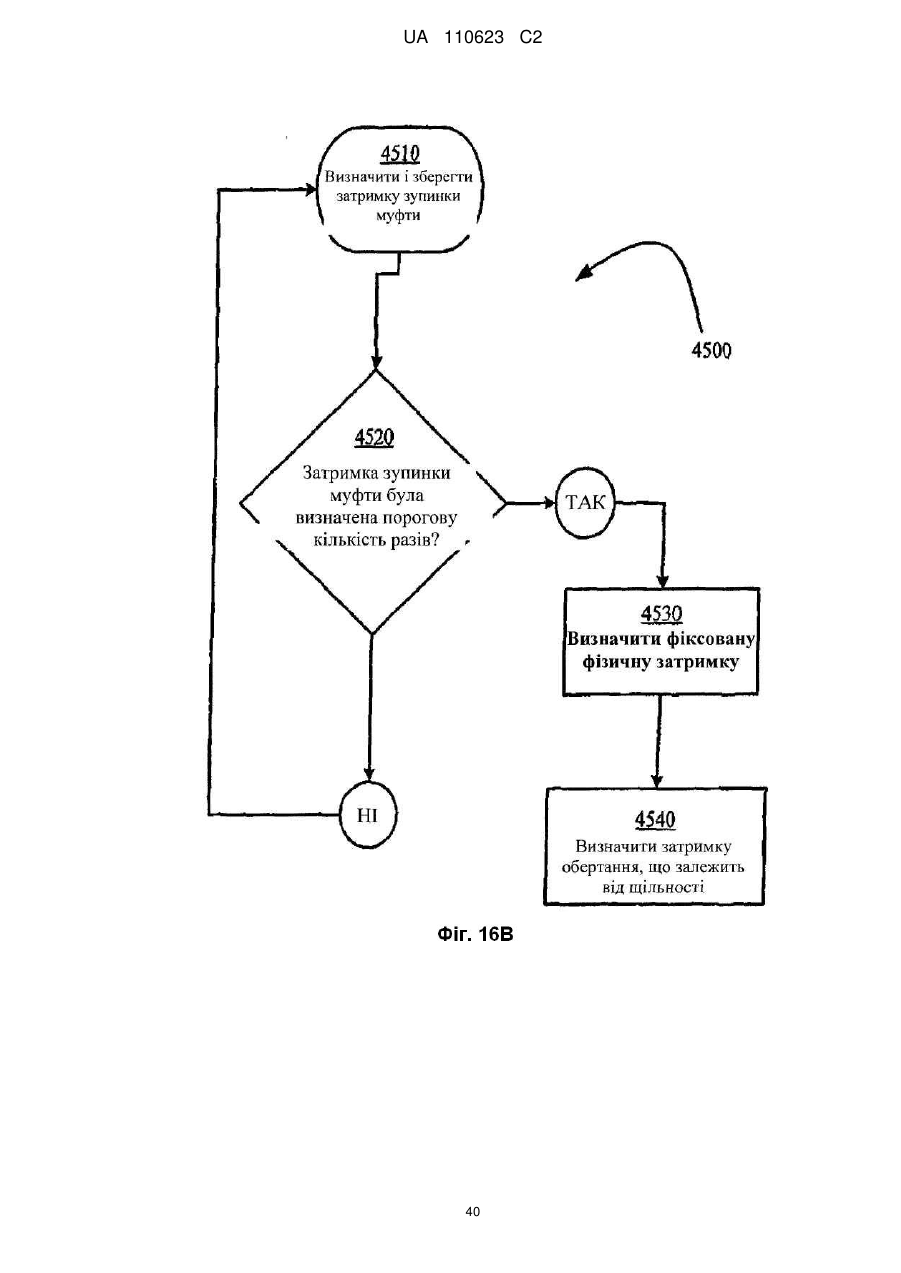
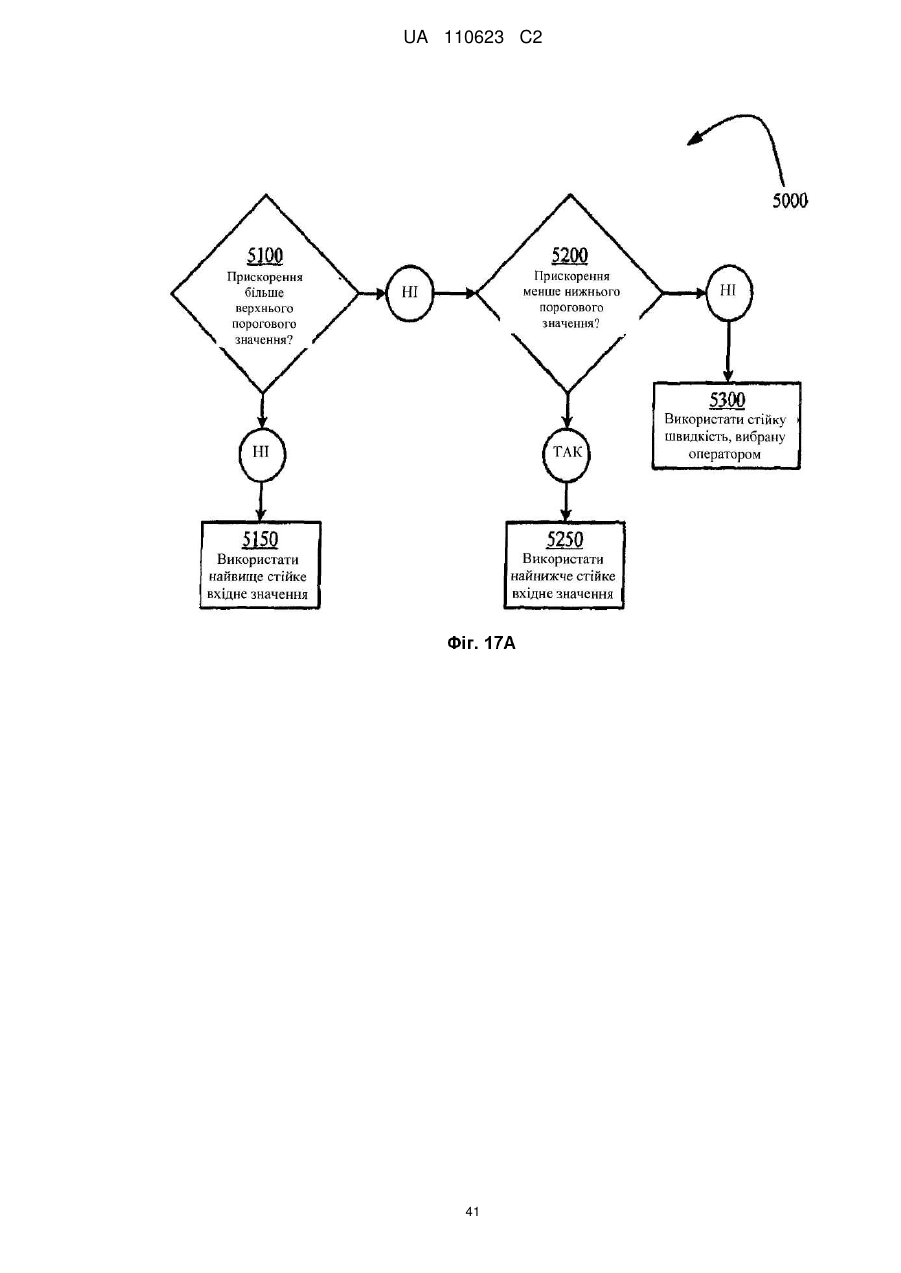
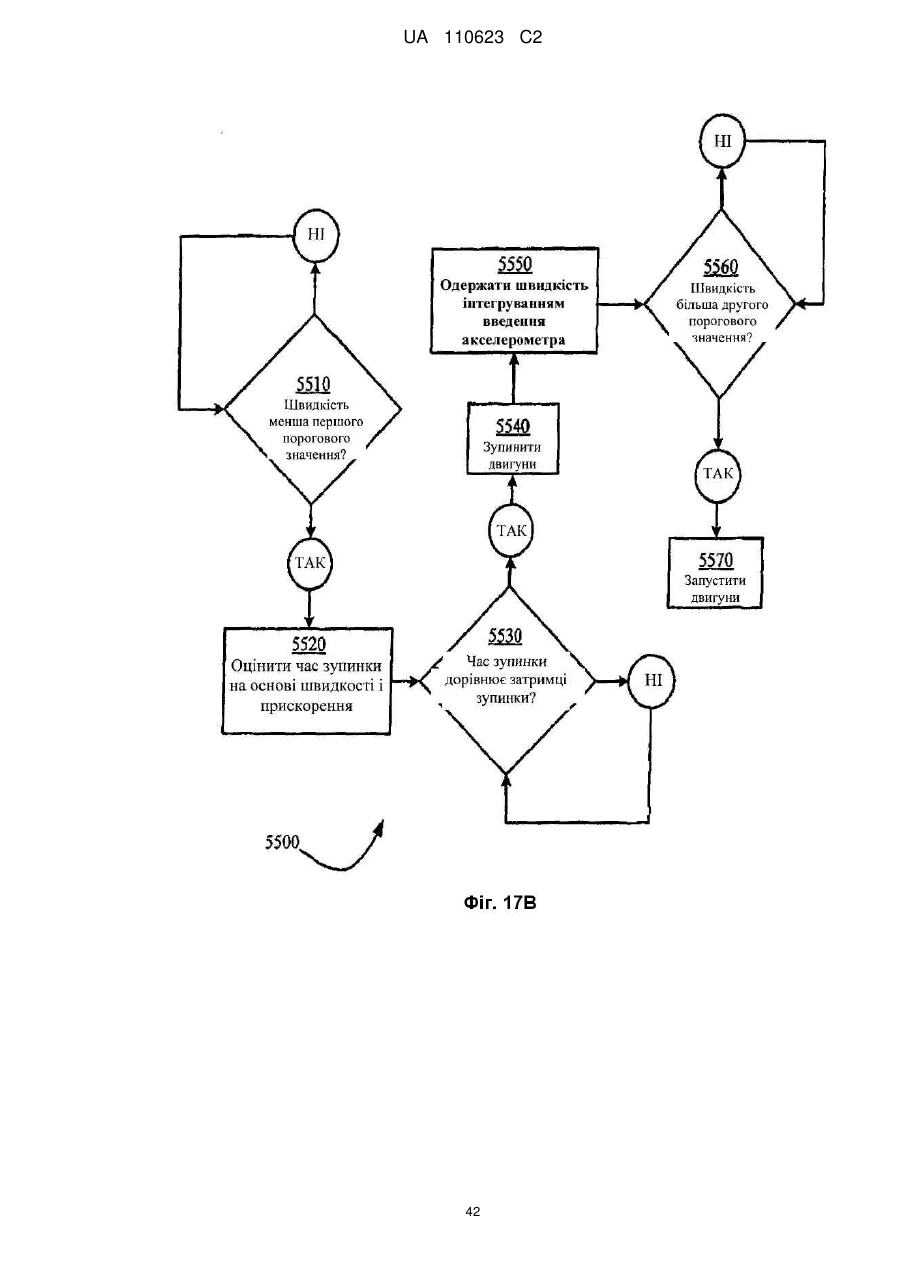
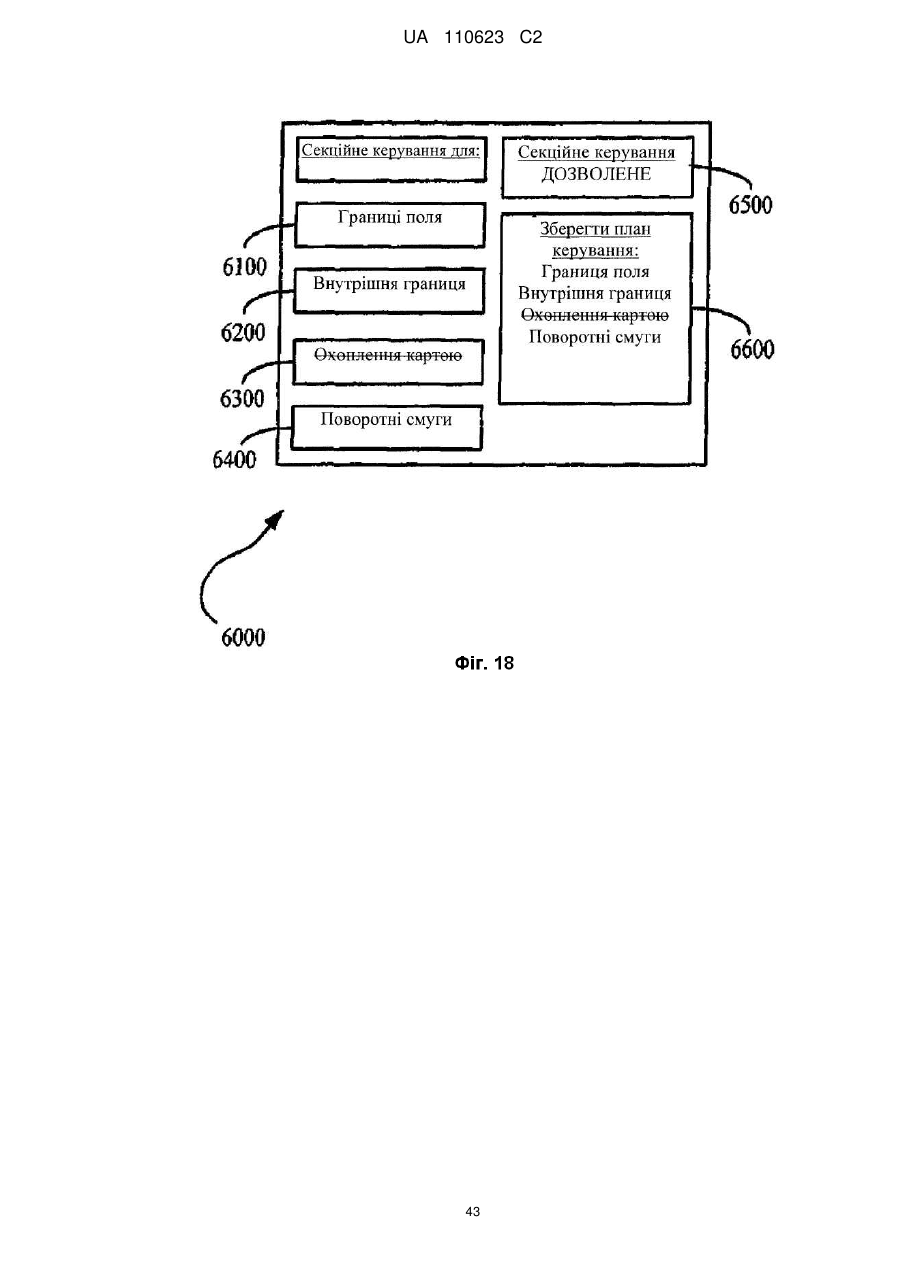
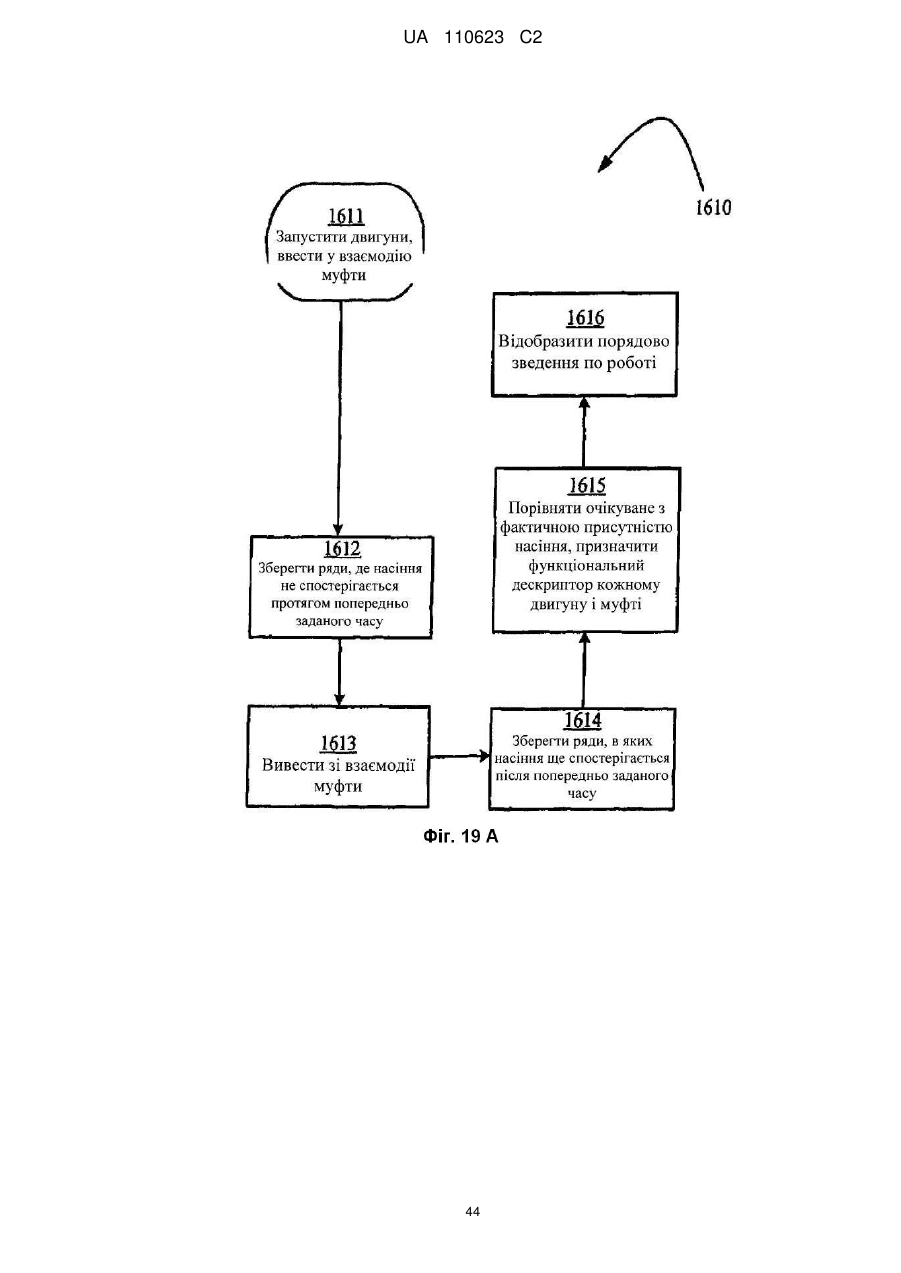
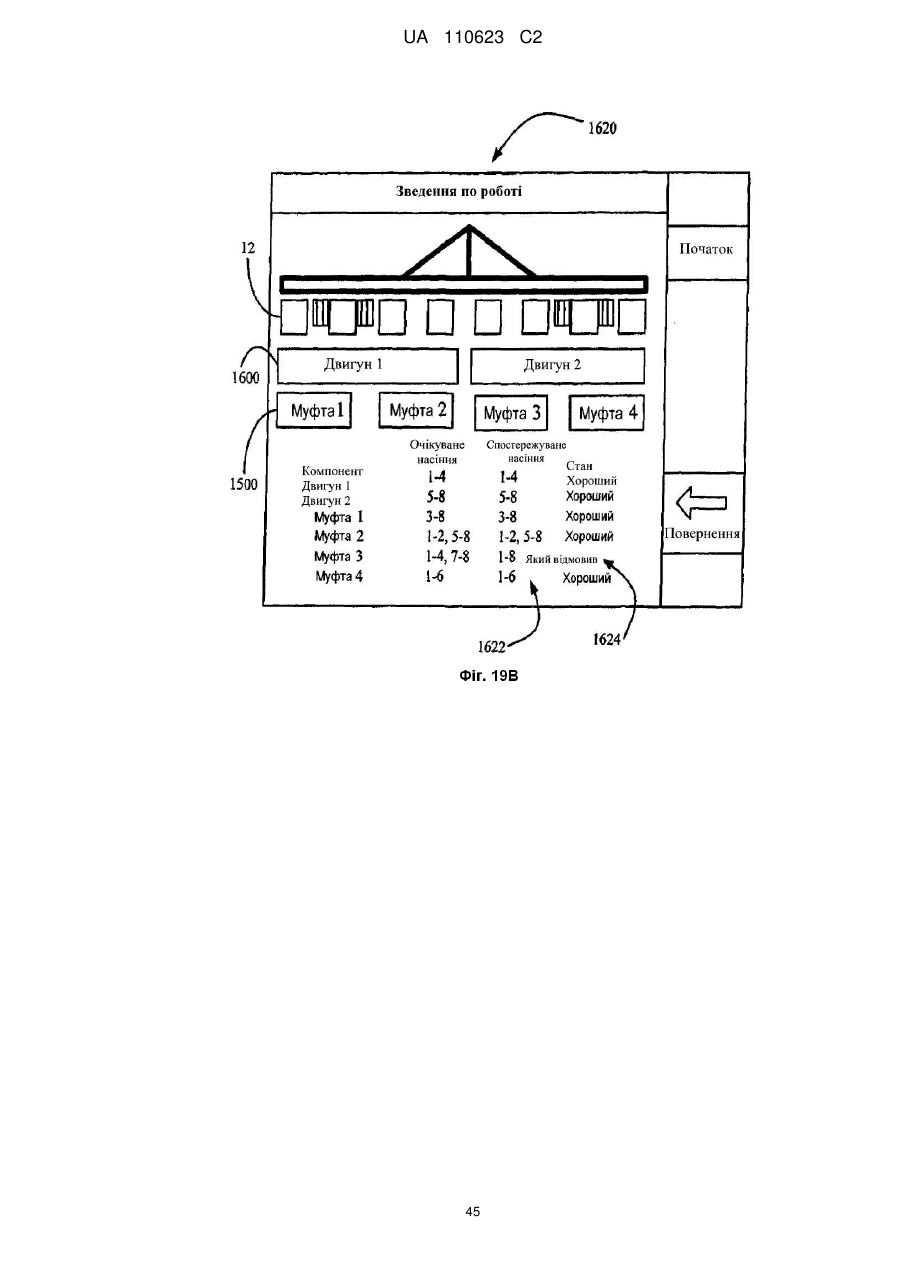
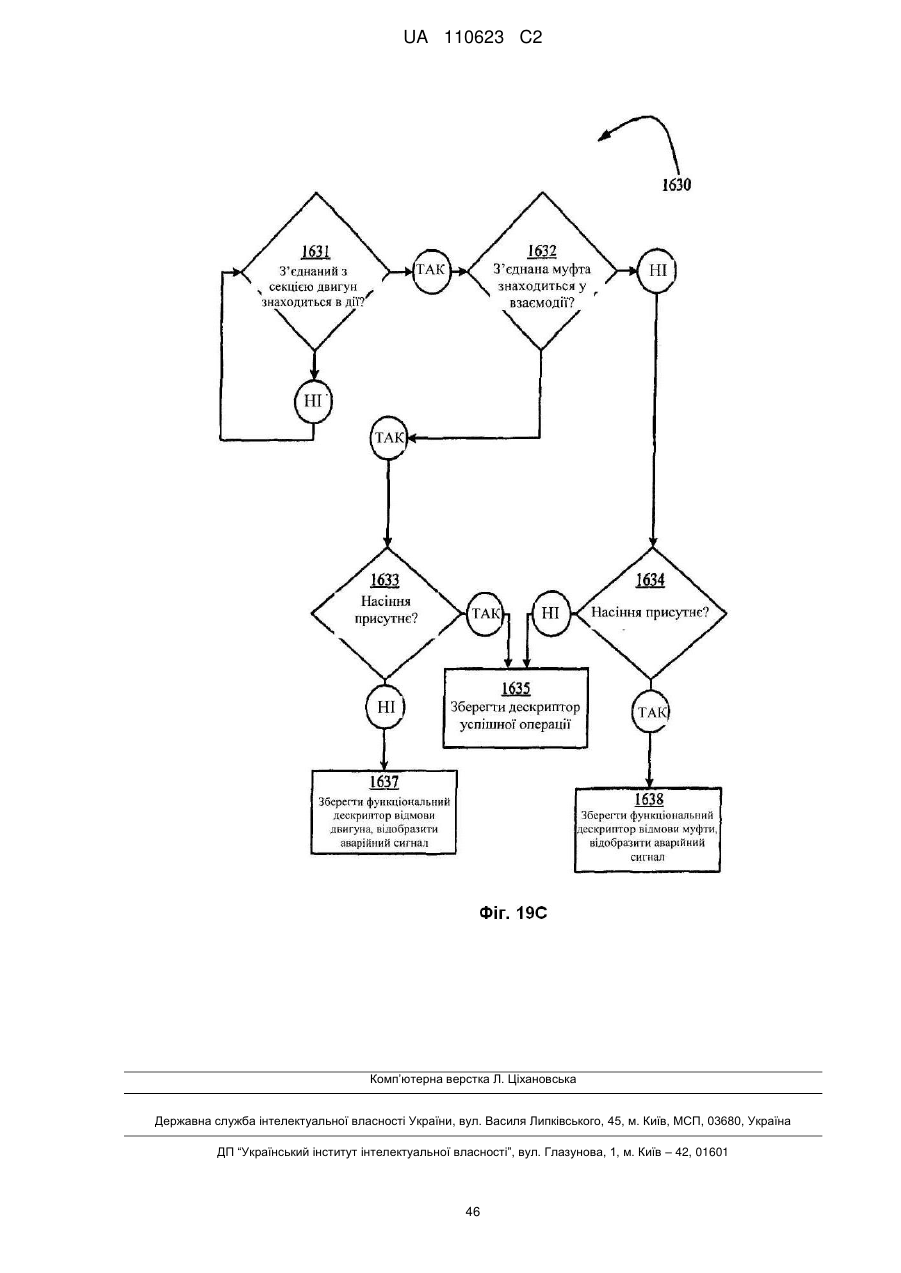
Реферат: Система і спосіб керування посівом для підвищення урожаю шляхом мінімізації "надпосіву" і "недопосіву" протягом посівних операцій. Коли сівалка переміщується по полю, створюється точна карта посіву насіння шляхом зіставлення часу кожного імпульсу насінини, сформованого датчиками насіння, з місцеположенням блока GPS. На основі створеної карти посіву насіння задається границя зупинки посіву відповідно до попередньо засіяного насіння або іншою границею поля так, що якщо секція сівалки перетинає границю зупинки посіву, контролери секцій виводять із взаємодії приводи відповідних дозаторів насіння, щоб перешкоджати посіву насіння. Контролери секцій спонукають приводи повторно увійти у взаємодію, дозволяючи відновити посів, при виході відповідних секцій за границю зупинки посіву. UA 110623 C2 (12) UA 110623 C2 UA 110623 C2 5 10 15 20 25 30 35 40 45 50 55 ПЕРЕХРЕСНЕ ПОСИЛАННЯ НА СПОРІДНЕНІ ЗАЯВКИ Дана заявка вимагає пріоритет по попередній заявці на патент США № 61/368117, поданій 27 липня 2010 року. РІВЕНЬ ТЕХНІКИ Сівалки з системою керування посівом зі змінною швидкістю ("VRS"), які дозволяють змінювати швидкість посіву в ході руху на основі типу ґрунту і умов ґрунту, є відомими в галузі техніки. Аналогічно в галузі техніки сівалок також є відомим забезпечення систем роздільного "секційного керування" для запуску і зупинки посіву насіння окремими рядами або наборами рядів в ході руху, щоб мінімізувати надмірний посів у вузлових рядах або недостатній посів при вході в граничні (поворотні) смуги або виході з них, навколо водотоків і границь поля. Доступні в цей час системи VRS і секційного керування діють спільно з глобальною системою визначення місцеположення ("GPS") і картами покриття поля для керування дозатором насіння шляхом введення у взаємодію і виведення з взаємодії муфт приводів так, щоб керувати обертанням і/або швидкістю обертання висівного диска вакуумних дозаторів або обертанням пальців дозаторів з пальцевими затискачами. Однак такі системи основуються переважніше на місцеположенні сівалки в момент часу посилання команд на системи VRS і системи секційного керування, ніж на точному визначенні фактичного фізичного внесення насіння в полі. У результаті значний надмірний посів, недостатній посів або інші неточності все ще можуть мати місце в сівалках, оснащених системами VRS і секційного керування, які основуються лише на GPS і картах покриття. Наприклад, якщо фермер починає сіяння, але одна або декілька висівних секцій не видають насіння в результаті відмови, то карта покриття поля покаже, що площа була засіяна, навіть якщо насіння фактично не видавалося. Потім буде важко точно засіяти цю площу, оскільки фермер допустив помилку. Відповідно існує необхідність в поліпшеній системі керування висіванням, яка забезпечує переваги VRS і секційного керування, але основується на складанні карт точного посіву насіння на відміну від складання карт покриття на основі GPS, щоб мінімізувати надмірний посів полів і недостатній посів полів. КОРОТКИЙ ОПИС КРЕСЛЕНЬ Фіг. 1 - восьмирядна сівалка без секційного керування, що ілюструє недостатній посів на поворотній смузі. Фіг. 2 - восьмирядна сівалка без секційного керування, що ілюструє надмірний посів на поворотній смузі. Фіг. 3 - восьмирядна сівалка без секційного керування, що ілюструє недостатній посів /надмірний посів 50/50 на поворотній смузі. Фіг. 4 - восьмирядна сівалка з керуванням 1-рядними секціями, що ілюструє ідеальний посів без надмірного посіву або недостатнього посіву на поворотній смузі. Фіг. 5A - восьмирядна сівалка, що ілюструє недостатній посів з системою керування з 2рядними секціями. Фіг. 5B - восьмирядна сівалка, що ілюструє надмірний посів з системою керування з 2рядними секціями. Фіг. 5C - восьмирядна сівалка, що ілюструє надмірний-недостатній посів 50/50 з системою керування з 2-рядними секціями. Фіг. 6 - поле з внутрішньою границею, що ілюструє різну щільність посіву, засіяне з використанням VRS з керуванням з 1-рядними секціями. Фіг. 7 - схематична ілюстрація здійснення системи керування посівом. Фіг. 8 - варіант здійснення екрана монітора для введення зміщень GPS по відношенню до трактора. Фіг. 9 - варіант здійснення екрана монітора для введення зміщень відносно осі повороту сівалки. Фіг. 10A - ілюстрація здійснення екрана монітора для початку процедури верифікації зміщення GPS. Фіг. 10B - ілюстрація здійснення екрана монітора для продовження процедури верифікації зміщення GPS. Фіг. 10C - ілюстрація здійснення екрана монітора для завершення процедури верифікації зміщення GPS. Фіг. 10D - ілюстрація здійснення екрана монітора для відображення виміряних і ввідних зміщень оператором GPS. Фіг. 11 - ілюстрація здійснення екрана монітора для конфігурування контролерів секцій шляхом вибору шаблона покриття. 1 UA 110623 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фіг. 12 - схематична ілюстрація здійснення способу для визначення затримки зупинки приводу зі змінною характеристикою. Фіг. 13A - схематична ілюстрація здійснення способу для визначення затримки старту приводу зі змінною характеристикою. Фіг. 13B - схематична ілюстрація здійснення способу для зупинки приводу зі змінною характеристикою на основі затримки зупинки приводу зі змінною характеристикою. Фіг. 13C - схематична ілюстрація здійснення способу для запуску приводу зі змінною характеристикою на основі затримки старту приводу зі змінною характеристикою. Фіг. 14 - схематична ілюстрація здійснення способу для визначення передавального числа між дозатором насіння і приводу зі змінною характеристикою. Фіг. 15A - схематична ілюстрація здійснення способу для визначення затримки запуску і затримки зупинки контролера секції. Фіг. 15B - схематична ілюстрація здійснення способу для виведення з взаємодії контролера секції на основі затримки зупинки контролера секції. Фіг. 15C - схематична ілюстрація здійснення способу для введення у взаємодію контролера секції на основі затримки старту керування секцією. Фіг. 16A - графік емпіричних даних, що ілюструють різні затримки, пов'язані з контролером секції. Фіг. 16B - схематична ілюстрація здійснення способу для визначення компонентів затримки зупинки керування секцією. Фіг. 17A - схематична ілюстрація здійснення способу вибору введення швидкості. Фіг. 17B - схематична ілюстрація здійснення способу для зупинки і запуску двигуна зі змінною характеристикою на основі прискорення. Фіг. 18 - схематична ілюстрація здійснення екрана призначеного для користувача інтерфейсу, що використовується для вибору умов зупинки посіву. Фіг. 19A - схематична ілюстрація здійснення способу для ідентифікації несправності в роботі системи керування посівом. Фіг. 19B - ілюстрація здійснення екрана монітора для відображення звіту про роботу системи керування посівом. Фіг. 19C - схематична ілюстрація іншого варіанту здійснення способу ідентифікації несправності роботи системи керування посівом. ДОКЛАДНИЙ ОПИС ВИНАХОДУ Тепер з посиланням на креслення, на яких однакові позиційні позначення означають ідентичні або відповідні частини по декількох видах, фіг. 1-5 ілюструють сівалку 10, яка висіває насіння 11 в полі 13, в якому раніше була засіяна поворотна смуга 15. Фіг. 1-5 призначені для ілюстрації з цілями порівняння способів посіву з "надпосів" (надмірний посів) і "недопосів" (недостатній посів) з використанням восьмирядної сівалки без секційного керування (фіг. 1-3) і потім з секційним керуванням (фіг. 4-5). На фіг. 1 показана восьмирядна сівалка без секційного керування, що понадміру засіває поворотну смугу 15 (тобто, де сіяння продовжується по всіх рядах, поки останній ряд не виявиться в межах поворотної смуги 1). На фіг. 2 ілюструється восьмирядна сівалка без секційного керування, що недостатньо засіває поворотну смугу 15 (тобто, де сіяння зупиняється по всіх рядах, як тільки перший ряд входить в поворотну смугу 15). На фіг. 3 показана восьмирядна сівалка без секційного керування, що ілюструє посів "50-50" надмірнийнедостатній для поворотної смуги 15 (тобто, де засівання продовжується по всіх рядах, поки половина рядів не увійде в поворотну смугу 15). Зрозуміло, що протилежне відбувається при виході з поворотної смуги. Тобто, при виході з поворотної смуги при використанні способу надмірного посіву, сіяння починається по всіх рядах, як тільки перший ряд сівалки виходить з поворотної смуги. Аналогічно, при виході з поворотної смуги, використовуючи спосіб недостатнього посіву, сіяння не починається по всіх рядах, поки останній ряд не вийде з поворотної смуги. За допомогою способу 50/50 посів починається по всіх рядах, коли половина рядів виходить з поворотної смуги. На фіг. 4 показана восьмирядна сівалка з секційним керуванням в кожному ряду сівалки (надалі "керування з 1-рядною секцією"). На фіг. 5A-5C ілюструється восьмирядна сівалка з секційним керуванням для кожних двох рядів сівалки (надалі "керування з 2-рядною секцією"). Зрозуміло, що секційне керування може включати в себе будь-яке необхідне число рядів. При порівнянні фіг. 1-3 з фіг. 4 можна легко побачити, що система керування з 1-рядною секцією ідеально засіє поле з невеликим надмірним посівом або без такого, за допомогою цього мінімізуючи марно витрачене насіння і незасіяні площі, приводячи до підвищеного урожаю, при інших рівних факторах. Подібним чином, порівнюючи фіг. 1-3 з фіг. 5A, 5B і 5C, можна легко 2 UA 110623 C2 5 10 15 20 25 30 35 40 45 50 55 60 побачити, що система секційного керування з 2-рядними секціями ідеально засіє поле тільки з мінімальним надмірним або недостатнім посівом в порівнянні з традиційними сівалками без секційного керування. На фіг. 6 показане поле 13 з двома різними типами 15, 17 ґрунту, позначеними різними шаблонами штрихування, розділене внутрішньою границею 19. Різні типи ґрунту показані засіяним насінням з різною щільністю (необхідно відмітити різну відстань між насінням 11 в різних типах 15, 17 ґрунту) з використанням сівалки з VRS і керуванням з 1-рядними секціями, причому якщо кожна висівна секція пройшла внутрішню границю 19, VRS задіювалася, щоб змінити щільність насіння для іншого типу ґрунту. Однак, зрозуміло, що навіть якщо сівалка забезпечена системою секційного керування, якщо точне розміщення насіння не є відомим і якщо система секційного керування не враховує деякі фактори, значний надмірний посів і недостатній посів все ще може мати місце, якщо ці фактори не враховуються. Ці фактори включають в себе швидкість сівалки, тимчасові затримки в запуску і зупинці дозатора насіння, і тимчасові затримки між насінинами, які випускаються з дозатора насіння, поки насіння не пройде через прохід для насіння і в борозенку, та інші фактори як обговорено далі. Потрібно також розуміти, що надмірний посів і недостатній посів для рядів може мати місце при вході або виході з різних типів ґрунту з різною необхідною щільністю насіння, якщо такі фактори не беруться до уваги. Загальний огляд На фіг. 7 ілюструється система 1005 керування посівом, яка діє спільно з висівними секціями 12 сівалки 10, щоб підвищувати урожай шляхом врахування вказаних вище факторів та інших факторів для створення точної карти посіву насіння в полі. На фіг. 7 висівна секція 12 ілюструється у вигляді висівної секції для сівалки з центральним заповненням, такої як розкрита в патенті США № 7438006, включеному в даний документ повністю шляхом посилання, але зрозуміло, що система 1005 керування посівом може використовуватися з більш традиційними висівними секціями, такими як розкриті в патенті США № 4009668, також включеному в даний документ повністю шляхом посилання, або будь-яким іншим типом висівної секції для сівалки будь-якої марки або моделі. Висівні секції 12 розташовані з проміжками вздовж бруса 14 основної рами сівалки. Основна рама сівалки приєднується до трактора (не показаний) традиційним чином, таким як за допомогою зчіпної сережки або триточкового зчеплення, як відомо в галузі техніки. Вузли ходових коліс (не показані) підтримують основну раму над поверхнею землі і є рухомими відносно основної рами через приведення в дію гідравлічної системи (не показана) сівалки, пов'язаної з гідравлікою трактора, щоб підіймати і опускати основну раму сівалки між позицією транспортування і позицією посіву, відповідно. Кожна висівна секція 12 переважно підтримується від бруса 14 паралелограмним навісним пристроєм 16, який дає можливість кожній висівній секції 12 переміщуватися вертикально незалежно від бруса 14 й інших розташованих з проміжками висівних секцій, щоб пристосовуватися до змін в ландшафті або після зіткнення висівної секції з каменем або іншою перешкодою, коли сівалку тягнуть по полю. Кожна висівна секція 12 включає в себе дозатор 30 насіння, трубку проходу насіння або інший прохід 32 для насіння, вузол 34 борознопророблювача і вузол 36 загортача. Вузол борознопророблювача прорізає борозенку 38 в поверхні ґрунту 40, якщо сівалку 10 переміщують по полю. Безперервне підведення насіння 11 забезпечується на дозатор 30 насіння. Дозатор 30 насіння випускає окреме насіння 11 в прохід 32 для насіння з часовими інтервалами на основі необхідної щільності насіння і швидкості, з якою сівалку переміщують по полі. Насіння 11 падає з кінця проходу 32 для насіння в борозенку 38, що утворюється вузлом 34 борознопророблювача. Насіння 11 потім покривають ґрунтом за допомогою вузла 36 зароблювального колеса. При роботі, при проходженні кожної насінини 11 через прохід 32 для насіння, датчик 200 насіння посилає імпульс насіння на монітор 1000 сівалки. Монітор 1000 сівалки зіставляє момент часу імпульсу насінини з місцеположенням блока 100 GPS, щоб визначити точне місцеположення насіння, що засівається в полі, беручи до уваги швидкість сівалки, щільність насіння, відстані зміщень і т. д., попередньо всі визначені і відкалібровані протягом фаз установки і калібрування (що обговорюються далі), щоб створити точну карту сіяння насіння. На основі створеної карти посіву насіння монітор 1000 сівалки визначить, чи присутня умова "зупинити посів", коли висівна секція або секція (тобто, одна або декілька висівних секцій, якими керує контролер 1500 секції) сівалки 10 проходить над раніше засіяним насінням або коли висівна секція або секція переміщується через поворотну смугу, зовнішню границю або внутрішню границю поля. Якщо умова зупинки посіву є для конкретної висівної секції або секції, то буде сформований сигнал для виведення із взаємодії муфти, беручи до уваги різні фактори, 3 UA 110623 C2 5 10 15 20 25 30 35 40 45 50 55 60 такі як швидкість сівалки, зміни прискорення, затримки для муфти, затримки у викиді насіння і т. д., всі попередньо визначені і відкалібровані протягом фаз встановлення параметрів і калібрування (що обговорюються далі), так що відповідні дозатори насіння припиняють видачу насіння в належний час і відновлюють видачу насіння після проходження належного часу після умови "зупинити посів", щоб забезпечити в полі мінімальний надмірний посів або недостатній посів. Переважні компоненти системи керування посівом Система 1005 керування посівом переважно включає в себе блок 100 GPS (глобальна система визначення місцеположення), датчики 200 насіння, блок 350 керування і датчики 705 висоти, монітор 1000 сівалки, модуль 1105 кабіни і радіолокаційний систему 1205, які діють спільно для керування приводами 1600 зі змінною характеристикою і контролерами 1500 секцій сівалки 10, щоб мінімізувати для полів надмірний посів і недостатній посів. Монітор 1000 сівалки звичайно встановлюється в кабіні трактора, так що оператор легко може його бачити і взаємодіяти з ним при посіві. Переважним монітором 1000 сівалки є 20/20 SeedSense® від компанії Precision Planting, Inc., 23207 Townline Road, Tremont, штат Іллінойс 61568, і як розкрито в опублікованій заявці на патент США за номером публікації US 2010/0010667, повністю включеній в документ за допомогою посилання. Монітор сівалки переважно використовує графічний користувацький інтерфейс (GUI) сенсорного екрана і включає в себе мікропроцесор, запам'ятовуючий пристрій і інше застосовне апаратне і програмне забезпечення для прийому, зберігання, обробки, зв'язку, відображення і виконання різних функцій і функціональних можливостей, як описано надалі (надалі, в сукупності "схема обробки"), як легко зрозуміло фахівцям в даній галузі техніки. Монітор 1000 сівалки переважно виконаний з можливістю зв'язку з пристроєм перенесення даних, таким як флеш-накопичувач з інтерфейсом універсальної послідовної шини (USB), з'єднання з мережею Інтернет або будьякий інший засіб передачі даних для введення і витягання норм щільності насіння, інформації складання карти поля і т. д. Крім того, монітор 1000 сівалки знаходиться в електричному зв'язку (за допомогою проводів або бездротових технологій) для прийому вхідних сигналів від датчиків 200 насіння, блока 100 GPS і модуля 1105 кабіни. Датчики 200 насіння встановлюються до проходів 32 для насіння висівних секцій 12, щоб детектувати проходження насіння через них. Звичайним датчиком 200 насіння є фотоелектричний датчик, такий як виготовляє корпорація Dickey-John Corporation, 5200 DickeyJohn Road, Auburn, III, 62615. Типовий фотоелектричний датчик звичайно включає в себе елемент джерела світла і світлоприймальний елемент, розташований за отворами в передній і задній стінках проходу для насіння. При роботі, кожен раз, коли насіння проходить між джерелом світла і приймачем світла, насінина, яка проходить, перериває промінь світла, спонукаючи датчик 200 сформувати імпульс насіння або електричний сигнал, який вказує детектування проходження окремої насінини. Зрозуміло, що може використовуватися будь-який тип датчика насіння, здатного створювати електричний сигнал для позначення проходження окремої насінини. Блок 100 GPS виконаний з можливістю прийому сигналу GPS, що містить послідовність рядків даних GPS, від супутника (не показаний). Сигнал GPS передається на монітор 1000 сівалки. Переважним блоком 100 GPS є Deluo PMB-288, доступний від компанії Deluo, LLC, 10084 NW 53rd Street, Sunrise, FL 33351, або інший прийнятний пристрій. Блок 100 GPS використовується для відстеження швидкості і відстаней, пройдених сівалкою 10. Як буде більш детально обговорено далі, переважно вихідні дані блока 100 GPS, включаючи швидкість сівалки і відстані, пройдені сівалкою, передаються на монітор 1000 сівалки для відображення оператору сівалки і/або для використання в різних алгоритмах для одержання релевантних даних, що використовуються в зв'язку з переважною системою і способом за даним винаходом. У альтернативних варіантах здійснення блок 100 GPS містить систему визначення місцеположення, виконану з можливістю використання сигналів інших супутникових систем (визначення місцеположення), таких як Glonass або Galileo. У ще одних варіантах здійснення блок 100 GPS може містити будь-яку іншу систему визначення місцеположення, виконану з можливістю визначення координат сівалки 10 по широті і довготі. У доповнення до блока GPS система 1005 керування посівом переважно включає в себе радіолокаційну систему 1205, щоб визначати швидкість сівалки 10, оскільки емпіричні дані показали, що дані від блока 100 GPS є затриманими і ненадійними на швидкостях нижче приблизно однієї милі на годину (1 миля на годину). Емпіричні дані також показали, що блок 100 GPS буде вказувати швидкості в 0,1 або 0,2 милі на годину при фактичній зупинці сівалки 10. З цих причин введення значень швидкостей, забезпечене лише системами GPS, не є ідеальними для точного визначення, коли сівалка 10 зупинилася, або для прогнозу, коли сівалка зупиниться 4 UA 110623 C2 5 10 15 20 25 30 35 40 45 50 55 60 (з причин, що обговорюються далі), або при визначенні, чи відновила сівалка 10 переміщення. Радіолокаційна система 1205 розміщується в фіксованому місцеположенні і посилає радіолокаційний сигнал на модуль 1105 кабіни, який в свою чергу передає радіолокаційний сигнал на монітор 1000 сівалки для відображення швидкості сівалки. Модуль 1105 кабіни переважно встановлюється в кабіні трактора так, що його також може легко переглядати оператор і взаємодіяти з ним в ході посіву. Модуль 1105 кабіни переважно включає в себе перемикачі, виконані з можливістю надання можливості оператору вводити у взаємодію і виводити з взаємодії приводи 1600 зі змінною характеристикою, і вибірково підключати і вимикати контролери 1500 секцій протягом процедур калібрування до посіву (що обговорюються далі). Модуль 1105 кабіни також здійснює зв'язок з радіолокаційною системою 1205 і включає в себе схему обробки, виконану з можливістю визначення, чи є стійкою швидкість, що надається радаром, з причин, що обговорюються далі. Датчики 705 висоти можуть містити контактний перемикач, виконаний з можливістю замикання або розмикання ланцюга, коли важелі копіюючого колеса вузла 34 борознопророблювача більше не контактують з обмежувачем важеля копіюючого колеса, вказуючи знаходження сівалки в положенні транспортування або іншим чином піднятого вище ґрунту. У інших варіантах здійснення датчик 705 висоти може також містити будь-який датчик, встановлений в деякій позиції на сівалці 10, який визначає висоту згаданої позиції відносно поверхні ґрунту 40 з метою вказівки, що висівна секція знаходиться в положенні транспортування або іншим чином піднята вище ґрунту. Блок 350 керування переважно включає в себе інклінометр 600, вимірник 500 вертикального прискорення, вимірник 400 горизонтального прискорення і належну схему обробки, всі з яких фізично об'єднані в єдиний блок, який переважно встановлюється на брусі 14 сівалки 10, але який може встановлюватися в іншій відповідній позиції і в будь-якій орієнтації, прийнятній для вимірювання горизонтального прискорення, вертикального прискорення і нахилу трактора і/або бруса 14. Блок 350 керування знаходиться в електричному зв'язку (за допомогою проводів або бездротових технологій) з блоком 1500 керування секцією, приводами 1600 зі змінною характеристикою, датчиками 705 висоти і модулем 1105 кабіни. Можна використовувати більше одного блока 350 керування. Встановлення параметрів На фазі встановлення параметрів оператор переважно здатний вибирати марку і модель трактора, і марку і модель сівалки переважно за допомогою вибору, що випадає меню. Геометрія різних марок і моделей трактора і сівалки переважно зберігається в пам'яті, щоб зробити фазу встановлення параметрів більш швидкою і легкою, таким чином, оператор не повинен фізично вимірювати кожну з різних відстаней, обговорених нижче, для моделювання геометрії сівалки і відстаней зміщення для блока 100 GPS. Система 1005 керування посівом використовує ці відстані, щоб визначити місцеположення кожного датчика 200 насіння на основі місцеположення блока 100 GPS. У подальшому способі і ілюстраціях передбачається, що блок 100 GPS встановлений на кабіні трактора, хоч зрозуміло, що є можливими інші встановлювальні позиції (такі як безпосередньо сама сівалка 10). На фіг. 8 ілюструється варіант здійснення встановлювального екрана 1200, що відображається монітором 1000 сівалки, для введення зміщень GPS по відношенню до трактора. Як проілюстровано на екрані 1200, відстані зміщення включають в себе відстань 1202 від блока 100 GPS до середньої лінії задніх коліс трактора, відстань 1206 до середньої лінії трактора, відстань 1210 від середньої лінії задніх коліс трактора до осі повороту трактора і відстань 1214 до ґрунту. Зрозуміло, що хоч інші відстані, що вводяться в фазі встановлення параметрів, як описано в документі, використовуються для встановлення позиції виходу проходу для насіння, відстань 1202 до середньої лінії задніх коліс трактора використовується для моделювання позиції сівалки 10 в стані "піднятий", в положенні транспортування позаду трактори. На фіг. 9 ілюструється варіант здійснення іншого екрана 1300 встановлення параметрів, що відображається монітором 1000 сівалки для введення позицій сівалки 10 відносно осі повороту сівалки. У доповнення до вибору марки і моделі оператор може бути запрошений вибрати тип рами сівалки і/або тип зчіпного пристрою, такий як причіпний, 2-точкове зчеплення і 3-точкове зчеплення. Монітор 1000 сівалки переважно відображає зображення 1306, що представляє геометрію вибраного типу рами сівалки і/або тип зчіпного пристрою і підказки оператору для введення відстаней, необхідних для моделювання геометрії сівалки. У ілюстративному прикладі на фіг. 9 монітор 1000 сівалки вимагає, щоб оператор ввів відстань 1308 між віссю повороту і середньою лінією копіюючих коліс 48, а також відстань 1312 між віссю повороту і виходом насіння. Інші типи рам і конструкції зчіпного пристрою вимагають, щоб оператор виміряв і ввів 5 UA 110623 C2 5 10 15 20 25 30 35 40 45 50 55 60 додаткові або інші відстані. У моніторі 1000 сівалки передбачається, що поперечні відстані від виходів насіння кожного з рядів до середньої лінії трактора на основі марки і моделі сівалки, попередньо введені оператором. Альтернативно, оператор вибирає спеціальне вікно 1316 таблиці встановлювальних параметрів і вводить поперечні відстані 1318 від кожного виходу насіння до середньої лінії сівалки 10. Як частину початкової установки оператору переважно видають підказку виконати процедуру верифікації, щоб перевірити зміщення GPS, введені в попередні екрани 1200 і 1300 встановлювальних параметрів. На фіг. 10A ілюструється інший варіант здійснення екрана 1400 встановлювальних параметрів, запитуючого оператора вмістити прапори 1405 поруч з копіюючими колесами 48 крайнього правого і крайнього лівого висівних секцій сівалки 10. Коли оператор вказує, що сівалка 10 знаходиться на місці, монітор 1000 сівалки записує перше тестове місцеположення блока 100 GPS. На фіг. 10B і 10C ілюструються варіанти здійснення подальших екранів 1410 і 1420 встановлювальних параметрів, що запитують оператора повертати сівалку 10 навколо так, щоб прапори 1405 були суміжними з копіюючими колесами 48 на протилежних сторонах сівалки 10. Коли оператор вказує, що сівалка 10 знаходиться на місці, монітор сівалки записує друге тестове місцеположення блока 100 GPS. У ще одному варіанті здійснення екрана 1430 встановлювальних параметрів, як проілюстровано на фіг. 10D, обчислюється сума 1432 відстаней 1202, 1210 і 1308, попередньо введених оператором. Виміряна відстань 1435 від блока 100 GPS до копіюючих коліс сівалки також визначається розподілом на дві відстані вздовж напрямку переміщення між першим тестовим місцеположенням і другим тестовим місцеположенням. Оператор запитується повторно виміряти попередньо введені зміщення GPS, якщо виміряна відстань 1435 відрізняється від суми 1432. Подібним чином відображається відстань 1206, попередньо введена оператором. Вимірювана відстань 1445, відповідна відстані 1206, визначається діленням на два поперечної відстані між першим тестовим місцеположенням і другим тестовим місцеположенням. Оператор запитується повторно виміряти попередньо введені зміщення GPS, якщо виміряна відстань відрізняється від відстані 1206, попередньо введеної оператором. Як проілюстровано на подальшому екрані 1502 встановлювальних параметрів, оператор конфігурує секційне керування сівалкою. Оператор вводить число контролерів 1500 секцій і число висівних секцій, якими керує кожний контролер секції. Оператор переважно має можливість вибирати шаблон покриття. У ілюстративному варіанті здійснення за фіг. 11 ілюстрована сівалка 10 має чотири контролери 1500 секцій, кожний з них керує двома висівними секціями. Оператор вибирає вікна 110a, 1510b або 1510c, щоб вибрати, чи зіштовхуються контролери 1500 секцій з границею 1505 зупинки посіву в раніше засіяному насінням, при зміщенні на половину ряду від раніше засіяного насінням, або при зміщенні на повний ряд від раніше засіяного насінням, відповідно. У ілюстративному прикладі за фіг. 11 оператор вибрав зміщення в повний ряд (1510c). Оператор вибирає вікна 1520a, 15206 або 1520c для вибору, чи повинні контролери секцій припинити посів, коли який-небудь ряд в контролері секції перетинає границю 1505 зупинки посіву ("недопосів"), коли будь-який ряд вздовж поперечної лінії 1515 сівалки перетинає границю 1505 зупинки посіву ("50 %-50 %"), або коли кожний ряд, яким керує контролер секції, перетинає границю 1505 зупинки посіву ("надпосів"), відповідно. У ілюстративному прикладі за Фіг. 11 оператор вибрав 50 %-50 % (1520b). На подальшій фазі встановлення параметрів оператор конфігурує приводи 1600 зі змінною характеристикою. Оператор вказує, які ряди приводяться в рух кожним приводом 1600 зі змінною характеристикою. Оператор вводить число імпульсів датчика на один оберт (що обговорюються далі), і частоту імпульсних сигналів датчика (що обговорюються далі) для кожного приводу 1600 зі змінною характеристикою. Альтернативно, оператор вибирає марку або тип приводу 1600 зі змінною характеристикою, асоційованого з такими ж характеристиками імпульсу і частоти. Продовжуючи фазу встановлення параметрів, оператору далі видають підказку ввести число насіння на один диск в дозаторах 30 насіння, що приводяться в рух за допомогою кожного приводу 1600 зі змінною характеристикою. Оператор далі ініціює процедуру калібрування (що обговорюється далі), в якій система 1005 керування посівом приводить в рух дозатори 30 насіння і визначає передавальне число між приводами 1600 зі змінною характеристикою і дозаторами 30 насіння. Альтернативно, оператор вводить передавальне число. Крім того, оператор наказує значення за умовчанням для норми щільності насіння, що підлягає використанню приводом 1600 зі змінною характеристикою, якщо система 1005 керування посівом втрачає сигнал від блока 100 GPS. Оператор далі конфігурує радіолокаційну систему 1205 в пробному пуску. Оператор керує трактором, і монітор 1000 сівалки приймає радіолокаційний імпульси від радіолокаційний 6 UA 110623 C2 5 10 15 20 25 30 35 40 45 50 55 60 системи 1205. Монітор 1000 сівалки визначає, як далеко перемістився трактор, використовуючи сигнал від блока 100 GPS. Монітор 1000 сівалки потім визначає, скільки радіолокаційний імпульсів прийнято на одиничну пройдену відстань. Оператор далі вибирає, чи є блок 100 GPS або радіолокаційна система 1205 основним або найбільш довірчим джерелом швидкості, що використовується монітором 1000 сівалки. Як описано далі в режимі "робота", монітор 1000 сівалки визначить, чи перевизначити вибір оператора відносно основного джерела швидкості, на основі прискорення сівалки. Повертаючись на фіг. 19A, в подальшій фазі встановлення параметрів система 1005 керування посівом переважно конфігурується для виконання процесу 1610, щоб ідентифікувати функціональну несправність приводів 1600 зі змінною характеристикою або контролерів 1500 секцій. При ініціюванні оператором процесу на етапі 1611, блок 350 керування переважно запускає один або декілька приводів 1600 зі змінною характеристикою і вводить у взаємодію один або декілька контролерів 1500 секцій для керування дозаторами насіння. Після того, як пройшов попередньо заданий проміжок часу (наприклад, 5 секунд) на етапі 1612, блок 350 керування зберігає піднабір рядів 12, в яких імпульси насіння не спостерігаються. Переважно, блок 350 керування потім виводить з взаємодії один або декілька контролерів 1500 секцій на етапі 1613 і на етапі 1614 зберігає піднабір рядів 12, в яких спостерігаються імпульси насіння після попередньо заданого часу. На етапі 1615 блок 350 керування порівнює очікуване з фактичною присутністю насіння для кожної тестованої конфігурації і призначає функціональний дескриптор (наприклад, "Хороший" або "Який Відмовив") кожному контролеру 1500 секції і приводу 1600 зі змінною характеристикою. На етапі 1616 монітор 1000 сівалки переважно відображає зведення по роботі, який вказує, чи є компоненти (наприклад, контролери 1500 секцій або привід 1600 зі змінною характеристикою) працюючими правильно. Повертаючись на фіг. 19B, зведення по роботі можуть містити екран 1620, що включає результуюче зведення 1622 очікуваного і фактичного спостереження імпульсів насіння для кожного протестованого компонента, і переважно включає в себе індикатор 1624 аварійного сигналу, що попереджає оператора, який зв'язаний з індикатором компонент відмовив. У інших варіантах здійснення блок 350 керування може бути виконаний з можливістю вводити у взаємодію або виводити з взаємодії кожний привід зі змінною характеристикою і контролер секції послідовно (наприклад, справа наліво) протягом фази встановлення параметрів, даючи можливість оператору визначати на вигляд або звук, чи працює кожний компонент правильно. Калібрування Система 1005 керування посівом переважно виконана з можливістю використання імпульсів насіння, що генеруються датчиками 200 насіння, щоб калібрувати контролери 1500 секцій і приводи 1600 зі змінною характеристикою. Калібрувальні процедури, описані в документі, вимірюють затримку між керуючим сигналом і функціональною зміною, детектованою датчиками 200 насіння. Функціональна зміна може включати в себе зміну швидкості подачі насіння, зупинку подачі насіння або запуск подачі насіння. Зрозуміло, однак, що затримку, пов'язану з будь-якою функціональною зміною, включаючи подачу насіння, можна вимірювати згідно з калібрувальними процедурами, описаними в документі. Калібрування затримки зупинки приводу зі змінною характеристикою На фіг. 12 ілюструється варіант здійснення процесу 2000 для калібрування приводів 1600 зі змінною характеристикою. На етапі 2100 блок 350 керування "інструктує запустити" привід 1600 зі змінною характеристикою. На етапі 2200, якщо блок 350 керування не приймає імпульс насіння протягом якого-небудь попередньо заданого часового проміжку, то на етапі 2250 монітор 1000 сівалки видає підказку оператору перевірити насіннєвий бункер на наявність насіння 11 або іншим чином виправити роботу сівалки 10 так, щоб насіння 11 випускалося дозатором 30 насіння через прохід 32 для насіння. Якщо блок 350 керування приймає імпульс насіння, то на етапі 2300 після попередньо заданого часу блок 350 керування дає команду приводу 1600 зі змінною характеристикою зупинити приведення в дію дозатора 30 насіння в момент часу t0. Час t0 зберігається за допомогою блока 350 керування. Блок 350 керування потім приймає імпульси насіння на етапі 2400 доти, поки протягом попередньо заданого часу (наприклад, 5 секунд) не буде прийнято жодного імпульсу насінини. На етапі 2450 блок керування потім записує час останнього імпульсу насінини (tstart). Різниця між tstart і t0 представляє затримку зупинки, пов'язану з приводом 1600 зі змінною характеристикою, затримка зупинки обчислюється і зберігається блоком 350 керування на етапі 2455. Калібрування затримки запуску приводу зі змінною характеристикою На фіг. 13A ілюструється варіант здійснення процесу 2500 для калібрування приводів 1600 зі змінною характеристикою. На етапі 2510 блок 350 керування дає команду зупинитися приводу 7 UA 110623 C2 5 10 15 20 25 30 35 40 45 50 55 60 1600 зі змінною характеристикою. На етапі 2520 після попередньо заданого часу блок 350 керування дає приводу 1600 зі змінною характеристикою команду починати приведення в рух дозатора 30 насіння у час t0. Час t0 збережений блоком 350 керування. Якщо імпульс насіння прийнятий блоком 350 керування на етапі 2530, то блок керування записує час першого імпульсу насінини (tstart) на етапі 2540. Різниця між tstart і t0 представляє затримку запуску, пов'язану з приводом 1600 зі змінною характеристикою, затримка запуску якого обчислюється і зберігається блоком 350 керування на етапі 2545. Відносно каліброваних затримки запуску і затримки зупинки, блок 350 керування переважно використовує затримку запуску і затримку зупинки для регулювання часу, в який блок 350 керування посилає керуючі сигнали на приводи 1600 зі змінною характеристикою, так що насіння починає видаватися або припиняє видаватися в необхідній позиції в полі. Згідно з переважним процесом 2550, що ілюструється на фіг. 13B, блок 350 керування оцінює час до наступної границі зупинки посіву на етапі 2552 (переважно використовуючи поточну швидкість сівалки і відстань до границі) і порівнює згаданий час затримки зупинки двигуна на етапі 2554. Якщо час до наступної границі зупинки посіву дорівнює затримці зупинки двигуна, то блок 350 керування переважно зупиняє двигун на етапі 2556. Згідно з переважним процесом 2560, що ілюструється на фіг. 13C, блок 350 керування оцінює час до наступної границі початку посіву на етапі 2562 (переважно використовуючи поточну швидкість сівалки і відстань до границі) і на етапі 2564 порівнює згаданий час із затримкою зупинки двигуна. Якщо час до наступної границі початку посіву дорівнює затримці зупинки двигуна, то блок 350 керування переважно запускає двигун на етапі 2566. Таким чином, блок 350 керування задає моменти часу подальших керуючих сигналів на основі різних затримок, що вимірюються як описано в документі. Вищезазначений процес калібрування може виконуватися протягом роботи на місці експлуатації, щоб визначити затримку запуску і затримку зупинки приводів зі змінною характеристикою в поточних або близьких до поточних умов роботи. Калібрування передавального числа між дозатором насіння і приводом зі змінною характеристикою На фіг. 14 ілюструється варіант здійснення процесу 3000 для визначення передавального числа між приводом 1600 зі змінною характеристикою і дозатором 30 насіння. На етапі 3100 блок 350 керування дає команду приводу 1600 зі змінною характеристикою привести в рух дозатор 30 насіння. На етапі 3200, якщо блок 350 керування не приймає імпульс насіння, на етапі 3250 монітор 1000 сівалки видає підказку оператору перевірити насіннєвий бункер на наявність насіння 11 або іншим чином виправити роботу сівалки 10 так, щоб насіння 11 починало випускатися дозатором 30 насіння через прохід 32 для насіння. Як тільки блок керування приймає імпульс насіння на етапі 3200, блок 350 керування на етапі 3300 зберігає час першого спостережуваного імпульсу насінини (t1). Як тільки блок 350 керування приймає попередньо задане число імпульсів насіння, наприклад, 30, на етапі 3400, блок 350 керування зберігає час тридцятого імпульсу насінини (t30) на етапі 3450. Різниця між t30 і t1, розділена на кількість імпульсів насіння, дорівнює часу, пов'язаному з часом між випуском насіння 11 дозатором 30 насіння (tnominal). Швидкість wm дозатора 30 насіння потім визначається згідно з наступним рівнянням: wm-1/((кількість насіння на один дозатор) × t nominal), де "кількість насіння на один дозатор" = "загальна кількість насіннєвих камер, апертур або інших захоплюючих насіння деталей на кожному дозаторі 30 насіння". Передавальне число R між приводом 1600 зі змінною характеристикою і дозатором 30 насіння дорівнює відношенням між кількістю імпульсів датчика, які повинні спостерігатися до виконання дозатором 30 насіння одного повного оберту, і кількістю імпульсів датчика на один оберт приводу 1600 зі змінною характеристикою. Передавальне число R переважно використовується блоком 350 керування, щоб визначити характеристику (частоту), з якою можна приводити в рух привід 1600 зі змінною характеристикою, щоб одержати задану швидкість wm дозатора насіння і таким чином - відповідний час tnominal між випуском насіння 11. Значення tnominal, wm і R переважно обчислюються на етапі 3455 послідовності операцій процесу 3000. Калібрування затримки запуску і затримки зупинки для контролера секції На фіг. 15A ілюструється варіант здійснення процесу 3500 для визначення затримки запуску муфти і затримки зупинки муфти, зв'язаних з контролером 1500 секції. На етапі 3510 блок 350 керування командує, щоб "працював" привід 1600 зі змінною характеристикою. На етапі 3525, якщо блок 350 керування не одержує імпульс насіння протягом попередньо заданого часу на етапі 3520 (наприклад, 5 секунд), то монітор 1000 сівалки видає підказку оператору перевірити 8 UA 110623 C2 5 10 15 20 25 30 35 40 45 50 55 60 насіннєвий бункер на наявність насіння 11 або іншим чином виправити роботу сівалки 10 так, щоб насіння 11 починало випускатися дозатором 30 насіння через прохід 32 для насіння. На етапі 3530, якщо блок 350 керування приймає імпульс насіння, то після попередньо заданого часу блок 350 керування дає контролеру 1500 секції команду відімкнутися у час t0, щоб зупинити дозатор 30 насіння від приведення в рух приводом 1600 зі змінною характеристикою. Час t 0 зберігається блоком 350 керування. Блок 350 керування потім приймає імпульси насіння на етапі 3540, поки протягом попередньо заданого часу не буде прийнятий жоден імпульс насіння. На етапі 3550, блок керування потім записує час останнього імпульсу насінини (t stop). Різниця між tstop і t0 представляє затримку зупинки муфти, зв'язану з контролером 1500 секції. Блок 350 керування переважно обчислює затримку зупинки муфти на етапі 3555. Після попередньо заданого часу на етапі 3560 блок 350 керування потім дає команду контролеру 1500 секції включитися у час t1, так що дозатор 30 насіння знов приводиться в рух приводом 1600 зі змінною характеристикою. Час t1 зберігається блоком 350 керування. На етапі 3580, якщо імпульс насіння приймається блоком 350 керування на етапі 3570, то блок керування записує час першого імпульсу насінини (tstart). Різниця між tstart і t1 представляє затримку запуску муфти, зв'язану з контролером 1500 секції. Блок 350 керування переважно обчислює затримку запуску муфти на етапі 3585. Блок 350 керування переважно використовує затримку запуску муфти і затримку зупинки муфти, щоб скоректувати час, в який блок 350 керування посилає керуючі сигнали на контролер 1500 секції, так що насіння починає видаватися або зупиняє видачу в необхідній позиції в полі. Згідно з переважним процесом 3600, що ілюструється на Фіг. 15B, блок 350 керування оцінює час t0 до наступної границі зупинки посіву на етапі 3652 (переважно з використанням поточної швидкості сівалки і відстані до границі) і на етапі 3654 порівнює згаданий час затримки зупинки муфти. Якщо час до наступної границі зупинки посіву дорівнює затримці зупинки муфти, то блок 350 керування переважно виводить з взаємодії муфту на етапі 3656. Згідно з переважним процесом 3700, що ілюструється на Фіг. 15C, блок 350 керування оцінює час до наступної границі початку посіву на етапі 3762 (переважно з використанням поточної швидкості сівалки і відстані до границі) і на етапі 3764 порівнює згаданий час із затримкою зупинки двигуна. Якщо час до наступної границі початку посіву дорівнює затримці зупинки двигуна, то блок 350 керування переважно запускає двигун на етапі 3766. Попередній процес 3500 може виконуватися під час роботи на місці експлуатації, щоб визначити затримку запуску муфти і затримку зупинки муфти в умовах поточного або близького до поточного режиму роботи. Емпіричні дані показали, що навіть в умовах майже еквівалентного режиму роботи є варіювання затримки зупинки муфти. На Фіг. 16A показаний графік 4000, що ілюструє компоненти затримки, пов'язаної з контролерами 1500 секцій. Вісь X 4145 графіка 4000 представляє відстань (в дюймах), пройдену сівалкою 10 після виведення з взаємодії муфти контролера 1500 секції. Набори даних 4150 і 4155 представляють тести, що виконуються з різними нормами 4140 щільності насіння в одиницях насіння на один акр. Прямокутники 4100 представляють фізичну затримку (виміряну в пройдених дюймах), пов'язану з електронними і пневматичними компонентами приводу 1600 зі змінною характеристикою. Прямокутники 4110 представляють затримку обертання (виміряну в пройдених дюймах), що є результатом механічної дії муфти в контролері 1500 секції. Прямокутники 4120 представляють затримку (виміряну в пройдених дюймах), пов'язану з часом, необхідним для випуску останньої насінини 11 з дозатора 30 насіння і проходження датчика 200 насіння. Кожний набір 4160 даних показує (знизу вгору) повну затримку з увімкненням затримки 4110 обертання, повну затримку без увімкнення затримки 4110 обертання, і остаточний діапазон 4130 сівалки, що представляє діапазон між повною затримкою без затримки 4110 обертання і із затримкою 4110 обертання. Продовжуючи посилання на фіг. 16A, затримка 4110 обертання змінюється, оскільки як тільки муфта виводиться з взаємодії у випадковій позиції обертання вала, що обертається всередині муфти, муфта повинна буде повернутися на значення градусів, що змінюється до входження в контакт зі стопором. Діапазон затримки 4110 обертання буде змінюватися на основі норми щільності насіння, оскільки муфта буде обертатися швидше при більш високих нормах щільності насіння. Таким чином, переважний варіант здійснення системи 1005 керування посівом виконаний з можливістю визначення діапазону затримок між керуючим сигналом, що посилається на контролер 1500 секції, і операційною зміною в контролері 1500 секції, а саме, зчепленням або розчепленням муфти. Блок 350 керування переважно виконує цей процес багато разів, щоб одержати закон розподілу затримок зупинки муфти. Десятий процентиль розподілу затримок зупинки муфти приблизно дорівнює фізичній затримці 4100. 9 UA 110623 C2 5 10 15 20 25 30 35 40 45 50 55 60 У переважному процесі 4500, що ілюструється на фіг. 16B, блок 350 керування визначає і зберігає повну затримку зупинки муфти (переважно як визначено на етапах 3530-3555 в процесі 3500 за Фіг. 6) на етапі 4510. Цей процес повторюється (переважно з тією ж нормою щільності насіння), поки затримка зупинки муфти не буде визначена порогову кількість разів (наприклад, п'ять) на етапі 4520. На етапі 4530, блок 350 керування визначає фіксовану фізичну затримку 4100 зупинки муфти (наприклад, знаходженням десятого процентиля розподілу повних затримок). На етапі 4540 блок 350 керування переважно визначає затримку 4110 обертання зупинки муфти, яка залежить від щільності посіву (наприклад, шляхом віднімання 10-ого процентиля розподілу повних затримок з дев'яностого процентиля розподілу повних затримок). У дії, коли блок 350 керування здійснює доступ до затримки зупинки муфти (наприклад, на етапі 3654 процесу 3600, що ілюструється на фіг. 15B), блок керування переважно змінює затримку 4110 обертання на основі відношень між нормою щільності, на якій була визначена затримка 4110 обертання, і активною нормою щільності. Наприклад, якщо затримка 4110 обертання була визначена при щільності 40000 насіння на акр, то затримка обертання подвоїться при щільності 20000 насіння на акр. Таким чином, блок 350 керування переважно коректує прогнозований компонент затримки зупинки муфти на основі активної норми щільності. Як ілюструється в наборі даних 4150 і наборі даних 4155 за фіг. 16A, шляхом коректування часу, в який керуючий сигнал посилається на контролер 1500 секції згідно з цим способом при кожній нормі 4140 щільності насіння, остаточні діапазони 4130 сівалки стають центрованими на необхідній відстані 4160 при кожній нормі 4140 щільності насіння. Крім того, монітор 1000 сівалки переважно відображає оператору фізичну затримку 4100, затримку 4110 обертання і затримку 4120 спаду. Монітор сівалки також відображає оператору суму затримки 4120 спаду і фізичної затримки 4100. Монітор 1000 сівалки переважно відображає згадану суму як "фіксовану затримку" і згадану затримку 4110 обертання 4110 як "змінну затримку" Монітор 1000 сівалки таким чином ізолює фіксовану частину затримки муфти від змінної частини затримки муфти, пов'язаної з системами 1500 секційного керування. З наявністю цієї інформації оператор здатний бачити перевагу виконання змін в позиції установки муфти, щоб зменшити змінну затримку. Потрібно оцінити, що кожна калібрувальна процедура, описана в документі, може виконуватися до посіву або на місці експлуатації протягом посіву. До посіву калібрувальна процедура може ініціюватися оператором, що використовує серію екранів на моніторі 1000 сівалки. Модуль 1105 кабіни переважно включає в себе перемикачі, виконані з можливістю надання можливості оператору стисло запускати в хід приводи 1600 зі змінною характеристикою, щоб завантажити дозатори 30 насіння насінням 11 до калібрувальної процедури перед посівом. Ці перемикачі можуть також використовуватися, щоб вводити у взаємодію і виводити з взаємодії приводи 1600 зі змінною характеристикою під час калібрувальної процедури перед посівом. Перемикачі можуть також використовуватися, щоб вибірково підключати і вимикати контролери 1500 секцій під час калібрувальної процедури перед посівом. Під час посіву, оскільки приводи 1600 зі змінною характеристикою і контролери 1500 секцій фактично використовуються в полі, датчики 200 насіння переважно продовжують забезпечувати імпульси насіння на блок 350 керування. Таким чином, блок 350 керування переважно є здатним вимірювати затримки, пов'язані з приводами 1600 зі змінною характеристикою і контролерами 1500 секцій, протягом посіву. Робота Як попередньо обговорено, з посиланням на Фіг. 7, імпульси насіння від датчиків 200 насіння в кожній висівній секції 12 сівалки 10 передаються на монітор 1000 сівалки. Монітор 1000 сівалки знаходиться в електричному зв'язку з блоком 100 GPS, модулем 1105 кабіни, радіолокаційною системою 1205 і блоком 350 керування. Блок 350 керування знаходиться в електричному зв'язку з окремими контролерами 1500 секцій і приводом 1600 зі змінною характеристикою і з датчиком 705 висоти. Монітор 1000 сівалки переважно виконаний з можливістю надання можливості оператору вводити команди і вхідні дані, включаючи величину щільності насіння і інформацію складання карти. Оператор вводить необхідну величину щільності насіння в монітор 1000 сівалки. Оператор потім переміщує сівалку 10 по полю. Монітор 1000 сівалки пересилає необхідну щільність насіння на блок 350 керування і визначає швидкість сівалки 10, використовуючи сигнали від блока 100 GPS і/або радіолокаційної системи 1205. Монітор 1000 сівалки відображає швидкість оператору і передає швидкість на блок 350 керування. Блок 350 керування визначає належну швидкість дозатора 30 насіння для одержання необхідної норми щільності насіння на основі швидкості сівалки 10 і інших критеріїв, включаючи розмір дозатора 30 насіння, кількість охоплюючих насіння функцій на дозаторі 30 насіння, і інші критерії, що 10 UA 110623 C2 5 10 15 20 25 30 35 40 45 50 55 60 впливають на норму подачі насіння. Блок 350 керування визначає фактичну поточну швидкість дозатора 30 насіння на основі імпульсу датчика приводу 1600 зі змінною характеристикою і посилає належний керуючий сигнал на приводи 1600 зі змінною характеристикою. Кожний привід 1600 зі змінною характеристикою виконаний з можливістю індивідуально змінно приводити в рух дозатор 30 насіння в кожній висівній секції сівалки 10 зі швидкістю на основі керуючого сигналу, прийнятого від блока 350 керування. Блок 350 керування використовує сигнал від датчика 705 висоти, щоб визначити, чи піднята сівалка 10 в положення транспортування. Якщо блок 350 керування визначає, що сівалка 10 знаходиться в положенні транспортування, то він переважно видасть команду приводам 1600 зі змінною характеристикою зупинити приведення в рух дозаторів 30 насіння. Система 1005 керування посівом також створює карту посіву насіння. Оскільки кожна з насінин 11 проходить через прохід 32 для насіння, датчик 200 насіння посилає на блок 350 керування імпульс насіння. Монітор 1000 сівалки зв'язує момент часу імпульсу насінини з місцеположенням блока 100 GPS і визначає позицію в полі для випускання насіння 11 на основі зміщень GPS, введених оператором на фазі встановлення параметрів, як попередньо описано. Монітор 1000 сівалки потім додає позицію насіння 11 до карти посіву насіння, яка переважно відображена оператору і використовується, щоб визначати умови "зупинки посіву". Монітор 1000 сівалки визначає, чи присутня умова зупинки посіву для якої-небудь секції (що містить одну висівну секцію або набір висівних секцій) сівалки 10, монітор 1000 сівалки посилає сигнал зупинки посіву на блок 350 керування. Блок 350 керування потім посилає сигнал для приведення в дію контролера 1500 секції так, щоб муфта виходила з взаємодії, так що дозатори 30 насіння в секції не приводяться в рух, поки муфта не буде повторно зчеплена, якщо проходить умову зупинки посіву. Муфти можуть бути будь-якими пневматичними або електричними муфтами, як відомі в галузі техніки. Система 1005 керування посівом також може використовуватися для сповіщення оператора про операційні несправності в приводах 1600 зі змінною характеристикою і контролерах 1500 секцій шляхом використання імпульсів насіння під час операцій на місці експлуатації. Що стосується фіг. 19C, ілюструється переважний процес 1630 для забезпечення оператору таких попереджень на місці експлуатації. На етапі 1631 блок керування визначає, чи знаходиться в дії привід 1600 зі змінною характеристикою, зв'язаний з висівною секцією 12. Як тільки привід зі змінною характеристикою знаходиться в дії, блок керування визначає на етапі 1632, чи підключений контролер 1500 секції, зв'язаний з висівною секцією. Якщо зв'язаний контролер секції не підключений, то на етапі 1634 блок керування визначає, чи вноситься насіння в рядку. Якщо насіння не вноситься, на етапі 1635 зберігається дескриптор успішної операції. Якщо насіння вноситься, на етапі 1638 зберігається дескриптор операції відмови муфти і користувачеві переважно відображається аварійний сигнал. Повертаючись на етап 1632, якщо зв'язаний контролер 1500 секції підключений, то на етапі 1633 блок керування визначає, чи вноситься насіння. Якщо насіння вноситься, то дескриптор успішної операції зберігається на етапі 1635. Якщо насіння не вноситься, то на етапі 1637 зберігається операційний дескриптор відмови двигуна і користувачеві переважно відображається аварійний сигнал. Там, де аварійний сигнал відображається в результаті процесу 1630, система керування посівом також переважно виконана з можливістю визначення, чи сталася електрична або гідравлічна несправність. Потрібно оцінити, що система 1005 керування посівом може також використовуватися, щоб виявляти інші несправності роботи сівалки 10, які впливають на подачу насіння. На фіг. 17A ілюструється переважний процес 5000, що використовується системою 1005 керування посівом, щоб визначати швидкість сівалки 10. На етапі 5100 блок 350 керування визначає, чи є прискорення сівалки 10 більшим верхнього порогового значення (переважно 1,5 2 фут/с ), на основі сигналу, забезпеченого вимірником 400 горизонтального прискорення на етапі 5100. Якщо прискорення більше верхнього порогового значення, блок 350 керування визначає швидкість сівалки 10, використовуючи вище стійке значення, надана блоком 100 GPS ("надана GPS швидкість") і радіолокаційною системою 1205 ("надана радаром швидкість") на етапі 5150. Монітор 1000 сівалки визначає, чи є надана GPS швидкість стійкою, використовуючи алгоритм або інший спосіб, як відомо в галузі техніки. Модуль кабіни також включає в себе схему обробки, виконану з можливістю визначення, чи є надана радаром швидкість стійкою, використовуючи алгоритм або інший спосіб, як відомо в галузі техніки. На етапі 5200, якщо прискорення менше верхнього порогового прискорення, то блок 350 керування визначає, чи є прискорення сівалки 2 10 менше нижнього порогового значення (переважно -1,5 фут/с ) на основі сигналу, забезпеченого вимірником 400 горизонтального прискорення. На етапі 5250, якщо прискорення менше нижньої порогової величини, блок 350 керування визначає швидкість сівалки 10, 11 UA 110623 C2 5 10 15 20 25 30 35 40 45 50 55 використовуючи нижче стійке значення, надане блоком 100 GPS ("надана GPS швидкість") і радіолокаційною системою 1205 ("надана радаром швидкість"). На етапі 5300, якщо прискорення більше нижньої порогової величини, блок 350 керування визначає швидкість сівалки 10, використовуючи введення швидкості, попередньо вибране оператором. Як обговорено в документі в режимі "встановлення параметрів" монітор 1000 сівалки виконаний з можливістю надання можливості користувачеві вибирати введення переважної швидкості. Блок 350 керування буде вимушений часто зупиняти приводи 1600 зі змінною характеристикою, коли сівалка 10 не рухається. Подібним чином, блок 350 керування буде вимушений запускати приводи 1600 зі змінною характеристикою при поновленні сівалкою 10 переміщення. Як попередньо обговорено, емпіричні дані показали, що дані від блока 100 GPS є затриманими і ненадійними на швидкостях нижчих приблизно однієї милі на годину. Емпіричні дані також показали, що блок 100 GPS укаже швидкості в 0,1 або 0,2 милі на годину, коли сівалка 10 фактично зупинена. З цих причин введення швидкостей, забезпечене цими системами, є неідеальними для визначення, коли зупиниться сівалка 10, або визначення, коли сівалка 10 відновила переміщення. Таким чином, в переважному варіанті здійснення, блок 350 керування передбачає час зупинки сівалки 10, використовуючи сигнал від вимірника 400 горизонтального прискорення, і посилає належно синхронізований керуючий сигнал, щоб зупинити привід 1600 зі змінною характеристикою. Переважний процес 5500 для виконання цього способу ілюструється на фіг. 17B. Коли сівалка 10 сповільнює рух до швидкості меншої порогової швидкості (переважно 4,5 фут/с) на етапі 5510, блок 350 керування визначає оцінку часу зупинки на основі введення швидкості, що використовується в даний момент і швидкостей сповільнення (інтенсивності гальмування), вказаного вимірником 400 горизонтального прискорення, на етапі 5520. Коли час зупинки є приблизно рівним затримці зупинки, пов'язаній з приводом зі змінною характеристикою (переважно визначеним, як описано вище), на етапі 5530, блок 350 керування на етапі 5540 переважно видає команду приводам 1600 зі змінною характеристикою зупинити приведення в рух дозаторів 30 насіння. Продовжуючи посилання на фіг. 17B, після того, як сівалка 10 зупинилася, блок 350 керування переважно визначає, що сівалка 10 відновила переміщення, об'єднуючи сигнал, забезпечений вимірником 400 горизонтального прискорення, на етапі 1550. Коли швидкість, визначена на основі цього способу, досягає порогового значення на етапі 5560, блок 350 керування на етапі 5570 переважно видає команду блокам 1600 зі змінною характеристикою відновити приведення в рух дозаторів 30 насіння. Потрібно оцінити, що способи, описані в документі, можуть використовуватися, щоб автоматично перейти до іншого введення швидкостей, якщо відомі в галузі техніки. Таким чином, описаний в документі спосіб може застосовуватися кожен раз, коли одному введенню швидкості надається перевага перед іншим в деякому діапазоні яких-небудь кінематичних критеріїв, включаючи прискорення або швидкість сівалки 10. Монітор 1000 сівалки визначає, що присутня умова зупинки посіву, коли секція сівалки 10 переміщується зверху попередньо засіяного насіння, на основі карти посіву насіння, описаної вище. Монітор 1000 сівалки також визначає, що присутня умова зупинки посіву, коли секція сівалки 10 переміщується через границю 1505, встановлену оператором. Границя 1505 може містити зовнішню границю поля, що підлягає засіванню, або внутрішню границю всередині згаданого поля, яка охоплює водотік або перешкоду, на які оператор не бажає випускати насіння. Границя 1505 може також охоплювати поворотну смугу, в яку оператор має намір засівати насіння згодом. Оператор може імпортувати дані таких границь на монітор 1000 сівалки, використовуючи будь-який відповідний пристрій зберігання даних, включаючи карту флеш-пам'яті з інтерфейсом USB, з'єднання з мережею Інтернет і т. д. Монітор 1000 сівалки може також записати такі границі шляхом збереження місцеположення блока 100 GPS, тоді як оператор об'їжджає навколо границі. Монітор 1000 сівалки переважно виконаний з можливістю дозволяти оператору видавати на контролери 1500 секцій команду зупинити дозатори 30 насіння при одній, всіх або будь-якій підмножині умов з умов зупинки посіву, описаних в документі. На фіг. 18 ілюструється екран 6000 користувацького інтерфейсу, що відображається на моніторі 1000 сівалки і виконаний з можливістю надання можливості користувачеві вибирати умови зупинки посіву, як описано вище. Оператор може натиснути або вибрати вікна 6100, 6200, 6300 або 6400, щоб активувати або деактивувати умову зупинки посіву. Якщо умова зупинки посіву деактивована, зв'язане вікно переважно відображає те ж саме, використовуючи закреслення або інший індикатор, як проілюстровано у вікні 6300. Оператор натискає або 12 UA 110623 C2 5 10 15 вибирає вікно 6600, щоб зберегти набір з активованих умов зупинки посіву. Вікно 6500 вказує, чи дозволені контролери 1500 секцій для умови зупинки посіву. Потрібно оцінити, що в доповнення до умов зупинки посіву, описаних в документі, інші умови зупинки посіву на основі місцеположення, швидкості, орієнтації або конфігурації сівалки 10 можуть включатися в монітор 1000 сівалки або позначатися оператором. Потрібно оцінити, що функції обробки, що виконуються блоком 350 керування, як викладено в документі, також можуть виконуватися монітором 1000 сівалки. Крім того, функції обробки, що виконуються монітором 1000 сівалки, як викладено в документі, також можуть виконуватися блоком 350 керування. Попередній опис представлений, щоб дати можливість середньому фахівцеві в даній галузі техніки створювати і використовувати винахід, і представлений в контексті заявки на патент і вимог до неї. Різні модифікації до переважного здійснення пристрою, і загальні принципи і ознаки системи і способів, описаних в документі, будуть очевидними для фахівців в даній галузі техніки. Таким чином, даний винахід не повинен обмежуватися варіантами здійснення пристрою, системи і способів, описаних вище і проілюстрованих на фігурах креслень, а повинен одержати найширше тлумачення, яке узгоджується з рамками суті і об'єму прикладеної формули винаходу. ФОРМУЛА ВИНАХОДУ 20 25 30 35 40 45 50 55 60 1. Спосіб створення карти посіву насіння для поля і керування сівалкою, що включає: a) детектування кожного імпульсу насінини, що формується датчиком насіння, при проходженні насіння через прохід для насіння висівної секції сівалки при її переміщенні по полю під час посівних операцій; b) визначення місцеположення посіву насіння для кожної насінини в полі зіставленням часу кожного сформованого імпульсу насінини з місцеположенням блока GPS; c) збереження в пам'яті кожного місцеположення посіву насіння в полі; і d) збереження в пам'яті затримки між командою і одним з імпульсів насіння. 2. Спосіб за п. 1, в якому сівалка містить множину секцій, кожна з яких містить щонайменше одну з висівних секцій. 3. Спосіб за п. 2, в якому кожна секція включає в себе привід, який керує видачею насіння з секції. 4. Спосіб за п. 3, в якому кожна секція включає в себе контролер секції, який при приведенні в дію виводить з функціональної взаємодії привід для зупинки видачі насіння секцією. 5. Спосіб за п. 4, в якому при переміщенні сівалки по полю під час посівних операцій контролери секцій приводяться в дію для виведення з функціональної взаємодії приводів для зупинки видачі насіння відповідними секціями при проходженні відповідними секціями по будь-яких попередньо збережених місцеположеннях посіву насіння. 6. Спосіб за п. 5, в якому границя зупинки посіву задається за допомогою одного з групи, яка містить: будь-які попередньо збережені місцеположення посіву насіння; зовнішню границю поля; і внутрішню границю поля. 7. Спосіб за п. 6, який додатково включає вибір необхідної схеми покриття з групи, яка містить: недостатній посів; надмірний посів; і надмірний посів/недостатній посів 50/50 границі зупинки посіву. 8. Спосіб за п. 3, в якому команда містить сигнал керування, відправлений на привід, а затримка відповідає часу між командою і необхідною зміною в посіві насіння, при цьому затримка визначається з використанням імпульсів насіння, причому спосіб додатково включає синхронізацію подальшої команди на основі затримки. 9. Спосіб за п. 4, в якому команда містить сигнал керування, відправлений на контролер секції, а затримка відповідає часу між командою і необхідною зміною в посіві насіння, при цьому затримка визначається з використанням імпульсів насіння, причому додатково включає синхронізацію подальшої команди на основі затримки. 10. Спосіб за п. 3, який додатково включає: запуск приводу в момент запуску; і відображення попереджувального сигналу користувачеві, якщо імпульси насіння не детектовані протягом заданого часу після моменту запуску. 11. Спосіб за п. 4, який додатково включає: приведення в дію контролера секції в момент запуску; і відображення попереджувального сигналу користувачеві, якщо імпульси насіння детектовані після заданого часу після моменту запуску. 13 UA 110623 C2 5 10 15 20 25 30 35 12. Спосіб калібрування сільськогосподарської сівалки, виконаної з можливістю видачі насіння, що включає: детектування насіння при його видачі висівною секцією сівалки; відправлення керуючого сигналу на пристрій керування сівалки так, що є затримка між керуючим сигналом і результуючою зміною у видачі насіння; і вимірювання затримки на основі часу, в який одна або більше насінин видаються після відправлення керуючого сигналу. 13. Спосіб за п. 12, в якому керуючий пристрій являє собою контролер секції, який при приведенні в дію виводить з функціональної взаємодії привід, який керує видачею насіння для зупинки видачі насіння. 14. Спосіб за п. 12, в якому пристрій керування являє собою привід, який керує видачею насіння. 15. Спосіб за п. 13, який додатково включає етапи: багаторазового вимірювання затримки; і визначення частини затримки, яка залежить від швидкості, з якою насіння випускається, до приведення в дію контролера секції. 16. Система керування посівом сільськогосподарської сівалки з множиною висівних секцій, кожна з яких має дозатор насіння, виконаний з можливістю випускання насіння в прохід для насіння, що містить: контролер секції, функціонально з'єднаний з сівалкою; блок GPS, виконаний з можливістю визначення місцеположення сівалки; систему моніторингу на зв'язку з блоком GPS і контролером секції, виконану з можливістю визначення присутності однієї з множини умов зупинки посіву в згаданому місцеположенні і додатково виконану з можливістю надання вибору користувачеві підмножини умов зупинки посіву, в які приводиться в дію контролер секції; і датчик насіння, розміщений відносно проходу для насіння для формування імпульсів насіння при проходженні насіння, при цьому система моніторингу виконана з можливістю визначення місцеположення посіву насіння для кожної насінини зіставленням часу кожного сформованого імпульсу насінини з місцеположенням сівалки. 17. Система за п. 16, в якій одна з умов зупинки посіву включає в себе пересікання зовнішньої границі поля. 18. Система за п. 16, в якій одна з умов зупинки посіву включає в себе пересікання внутрішньої границі поля. 19. Система за п. 16, в якій одна з умов зупинки посіву включає в себе вхід в зону, в якій користувач планує висівати насіння згодом. 20. Система за п. 16, в якій одна з умов зупинки посіву включає в себе пересікання інших місцеположень посіву насіння. 14 UA 110623 C2 15 UA 110623 C2 16 UA 110623 C2 17 UA 110623 C2 18 UA 110623 C2 19 UA 110623 C2 20 UA 110623 C2 21 UA 110623 C2 22 UA 110623 C2 23 UA 110623 C2 24 UA 110623 C2 25 UA 110623 C2 26 UA 110623 C2 27 UA 110623 C2 28
ДивитисяДодаткова інформація
Назва патенту англійськоюSeedin control system and method
Автори англійськоюBaurer, Phil, Beyer, Keith, Schlipf, Ben, Koch, Justin
Автори російськоюБорер Фил, Бэйер Кит, Шлип Бэн, Коч Джастин
МПК / Мітки
МПК: G01C 21/00
Мітки: посівом, система, керування, спосіб
Код посилання
<a href="https://ua.patents.su/48-110623-sistema-i-sposib-keruvannya-posivom.html" target="_blank" rel="follow" title="База патентів України">Система і спосіб керування посівом</a>
Спосіб керування літальним апаратом та зміни його аеродинамічного компонування і система керування
Номер патенту: 55253
Опубліковано: 15.03.2005
Автори: Комендантова Людмила Степанівна, Кузьмін В'ячеслав Павлович, Смішко Григорій Павлович, Сайног Максим Борисович, Яковенко Петро Олексійович, Косовенко Євген Вікторович, Семенов Леонід Антонович, Доценко Борис Іванович, Егліт Микола Олександрович
МПК: F42B 15/01
Мітки: зміни, система, літальним, спосіб, керування, компонування, аеродинамічного, апаратом
Формула / Реферат:
1. Спосіб керування літальним апаратом та зміни його аеродинамічного компонування, який полягає у зміні кількості рулів, що беруть участь у процесі керування літальним апаратом, який відрізняється тим, що здійснюють одночасне розкривання двох пар рулів і приведення в дію першої пари рулів для керування по тангажу і (або) рисканню, а другу пару рулів утримують під нульовим кутом, використовуючи їх як стабілізатори, поки виконується...
Спосіб керування літальним апаратом та зміни його аеродинамічної компоновки і система керування
Номер патенту: 55253
Опубліковано: 17.03.2003
Автори: Егліт Микола Олександрович, Косовенко Євген Вікторович, Смішко Григорій Павлович, Комендантова Людмила Степанівна, Сайног Максим Борисович, Семенов Леонід Антонович, Яковенко Петро Олексійович, Кузьмін В'ячеслав Павлович, Доценко Борис Іванович
МПК: F42B 15/01
Мітки: зміни, апаратом, керування, компоновки, спосіб, система, літальним, аеродинамічної
Формула / Реферат:
1. Спосіб керування літальним апаратом та зміни його аеродинамічного компонування, який полягає у зміні кількості рулів, що беруть участь у процесі керування літальним апаратом, який відрізняється тим, що здійснюють одночасне розкривання двох пар рулів і приведення в дію першої пари рулів для керування по тангажу і (або) рисканню, а другу пару рулів утримують під нульовим кутом, використовуючи їх як стабілізатори, поки виконується...
Спосіб керування потужністю в замкненій системі керування потужністю системи зв’язку з режимом паралельного доступу з кодовим розподілом каналів (пдкр) (варіанти) та замкнена система керування потужністю систем
Номер патенту: 57747
Опубліковано: 15.07.2003
Автор: Сеінтс Кіт В.
МПК: H04B 7/00
Мітки: систем, паралельного, доступу, кодовим, потужністю, варіанти, керування, спосіб, замкнений, системі, зв'язку, система, пдкр, замкнена, розподілом, каналів, режимом
Формула / Реферат:
1. Спосіб керування потужністю в замкненій системі керування потужністю системи зв'язку з режимом паралельного доступу з кодовим розподілом каналів (ПДКР), який полягає в:вимірюванні значення енергії у смузі частот,вимірюванні енергії пілот-каналу,перерахунку зазначеної енергії пілот-каналу відповідно до значення пілотної складової для одержання значення неперешкоджаючої енергії.відніманні зазначеного значення...
Засіб для обробки насіння перед посівом
Номер патенту: 65374
Опубліковано: 12.12.2011
Автор: Кайкендал Л.Давід
МПК: A01C 1/06
Мітки: посівом, обробки, насіння, засіб
Формула / Реферат:
1. Засіб для обробки насіння перед посівом, що містить біопрепарат, який відрізняється тим, що культури бактерій біопрепарату розміщено у капсулах, здатних поступово розчинятися.2. Засіб за п.1, який відрізняється тим, що біопрепарат поєднано з іншими препаратами промислової обробки насіння, зокрема хімічними протравлювачами, з утворенням суспензії.
Спосіб (варіанти) та система для керування потоком між контролером базової станції і базовою приймально-передавальною станцією, пристрій керування обчислювальною машиною

Номер патенту: 80102
Опубліковано: 27.08.2007
Автори: Камат Санджай, Конгелф Майкл А., Вудал Лейф
МПК: H04Q 7/30, H04L 12/56
Мітки: базової, керування, пристрій, машиною, варіанти, станцією, система, потоком, спосіб, контролером, приймально-передавальною, базовою, станції, обчислювальною
Формула / Реферат:
1. Спосіб керування потоком між контролером базової станції і базовою приймально-передавальною станцією, що містить етапи, на яких:прирощують значення лічильника індикації потоку, що відображає оновлене число пакетів даних, переданих з буфера;визначають розмір вікна буфера, коли оновлене число пакетів даних, переданих з буфера, виявиться рівним або більшим, ніж порогове число;визначають ідентифікаційний номер (ІН) пакета...
Попередній патент: Апарат для сепарації
Наступний патент: Система та спосіб роботи пасивного та активного обладнання світлодіодного освітлення
Випадковий патент: Гідромеханічна передача транспортного засобу