Пристрій керування приводом переміщення шарнірно-зчленованої стрілової системи баштового крана
Номер патенту: 100059
Опубліковано: 10.07.2015
Автори: Ловейкін Вячеслав Сергійович, Шевчук Олександр Григорович

Формула / Реферат
Пристрій керування приводом переміщення шарнірно-зчленованої стрілової баштового крана, що містить асинхронний електродвигун, муфту, гальмівний механізм, редуктор, канатний барабан, поліспаст, який відрізняється тим, що додатково монтується мікроконтролер та частотний перетворювач.
Текст
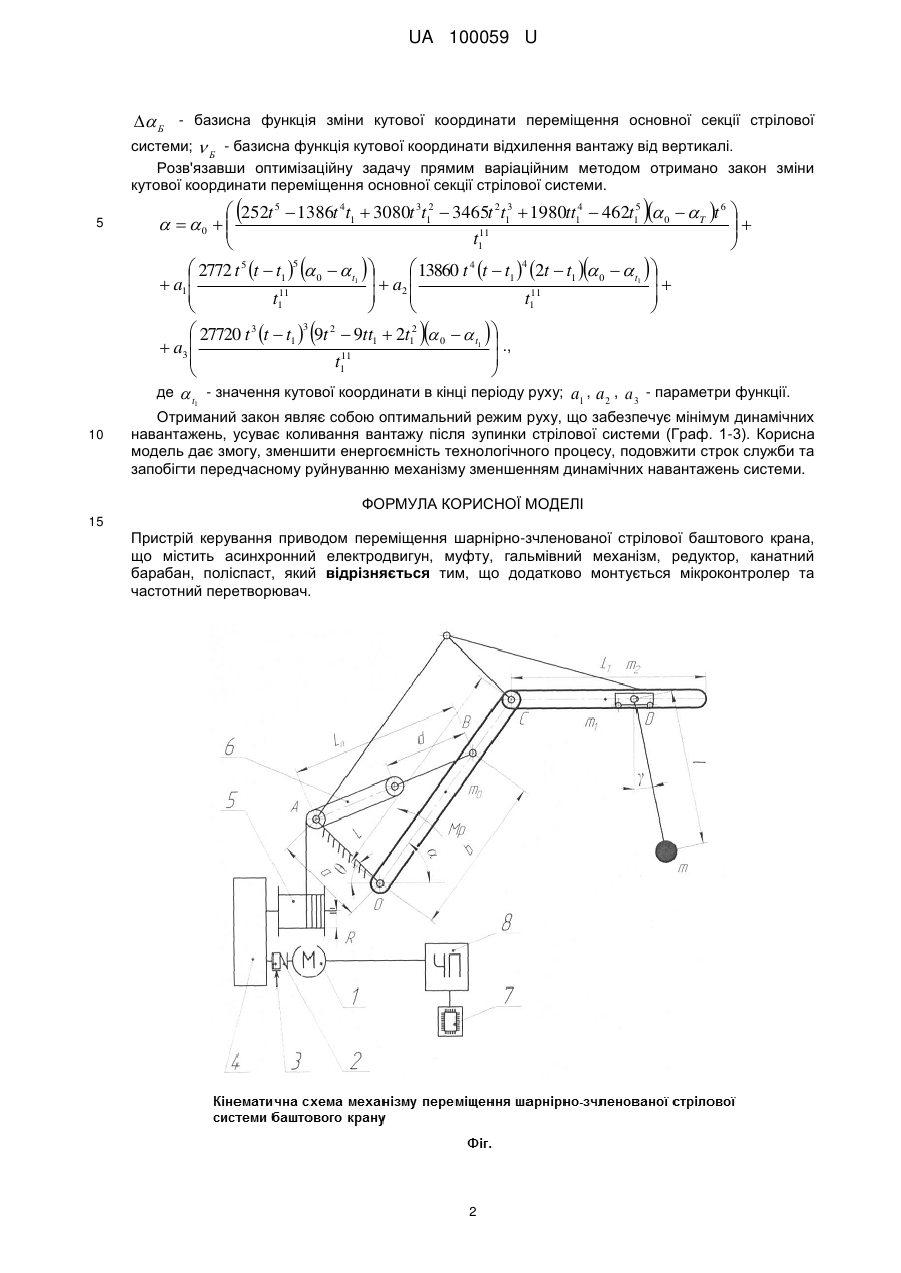
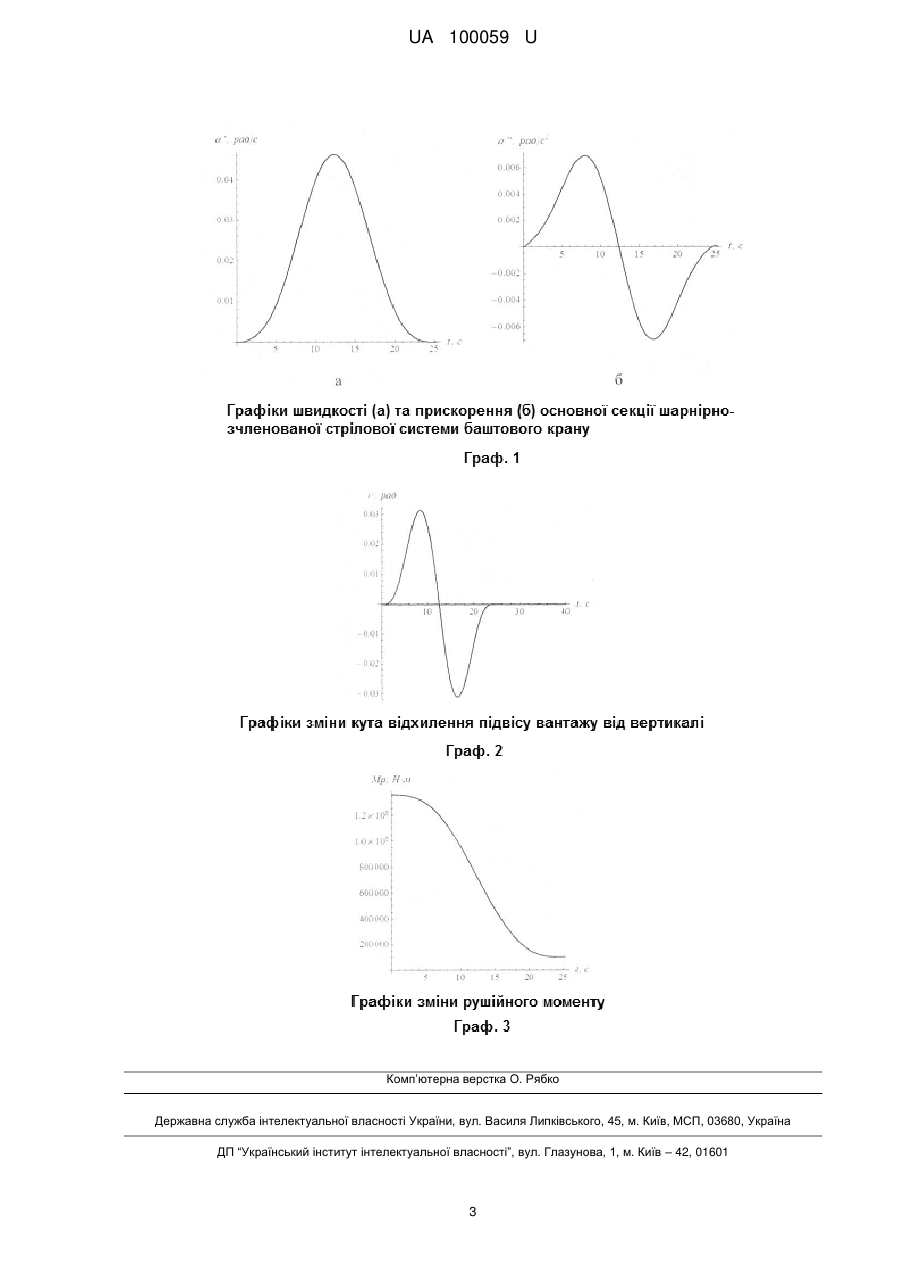
Реферат: В механізм переміщення шарнірно-зчленованої стрілової системи баштового крана, що містить асинхронний електродвигун, муфту, гальмівний механізм, редуктор, канатний барабан, поліспаст, додатково монтується мікроконтролер та частотний перетворювач. UA 100059 U (54) ПРИСТРІЙ КЕРУВАННЯ ПРИВОДОМ ПЕРЕМІЩЕННЯ ШАРНІРНО-ЗЧЛЕНОВАНОЇ СТРІЛОВОЇ СИСТЕМИ БАШТОВОГО КРАНА UA 100059 U UA 100059 U 5 10 15 20 25 30 Корисна модель належить до підйомно-транспортного устаткування, а саме до способу керування приводом переміщення шарнірно-зчленованої стрілової системи баштового крана. За аналог взятий баштовий кран з шарнірно-зчленованою стріловою системою який використовується для висотного будівництва (Рессо 140Н, https://www.morrow.com/sites/default/files/datasheets/SKK-140H.pdf) привід підйому стрілової системи якого складається з асинхронного електродвигуна, гальмівного механізму, редуктора, канатного барабана, поліспасту, основної та допоміжної секцій стрілової системи. Недоліком такого приводу є те, що електродвигун працює на природній механічній характеристиці, що зумовлює великі динамічні навантаження на механізм при перехідних режимах руху, а також виникнення коливань вантажу, які тривають протягом періоду руху та після зупинки стрілової системи. Задача корисної моделі - зменшення динамічних навантажень та усунення коливань вантажу за рахунок керування асинхронним електродвигуном за заданим оптимальним динамічним законом. Поставлена задача вирішується тим, що в механізм переміщення шарнірно-зчленованої стрілової системи, який включає асинхронний електродвигун, редуктор, гальмівний механізм, канатний барабан, поліспаст, згідно пропонованої корисної моделі додатково монтується мікроконтролер та частотний перетворювач. Фіг. Кінематична схема механізму переміщення шарнірно-зчленованої системи баштового крана. Механізм переміщення шарнірно-зчленованої системи баштового крана складається з асинхронного електродвигуна 1, муфти 2, гальмівного механізму 3, редуктора 4, канатного барабана 5, поліспасту 6, мікроконтролера 7, частотного перетворювача 8. Механізм переміщення шарнірно-зчленованої стрілової системи баштового крана працює таким чином: по розробленому на ПК оптимальному динамічному закону руху (описано нижче), встановленому на мікроконтролері, частотний перетворювач змінює частоту напруги живлення електродвигуна і кутова швидкість вала змінюється відповідно запрограмованому закону. Вал електродвигуна з'єднаний через гальмівний механізм та редуктор з канатним барабаном, на який намотується канат, що з'єднаний з основною секцією стрілової системи через поліспаст. Переміщення шарнірно-зчленованої стрілової системи характеризується кутовою координатою α, а обертання асинхронного електродвигуна координатою φ які визначаються залежностями: 35 un a 2 b 2 2 a b cos d , R де u - передаточне число редуктора механізму підйому стрілової системи; n - кратність поліспасту; R - радіус канатного барабана; a - довжина стійки; b - відстань від шарніра О до точки кріплення поліспасту; d - відстань від точки кріплення поліспасту до шарніра кріплення рухомих блоків поліспасту; - кут нахилу стійки до горизонталі. Для знаходження оптимального динамічного режиму руху привідного механізму використано інтегральний критерій, який являє собою середньоквадратичне значення рушійного моменту переміщення шарнірно-зчленованої стрілової системи протягом періоду руху 1/ 2 40 45 1 t1 I Mp2 dt min , t1 0 де t - час; t1 - тривалість руху штока гідроциліндра з одного крайнього положення в інше; Mp - рушійний момент переміщення шарнірно-зчленованої стрілової системи. Mp J 0 L2 m1 m2 m3 Б m3lLsin 0 cos cos 0 sin Б Б m gLcos 0 cos Б sin 0 sin Б 0 m1 m2 m3 ; 2 де m0 , m1 , m2 , m3 - маси основної та допоміжної секцій стрілової системи, візка та вантажу відповідно; J 0 - момент інерції основної секції стрілової системи відносно осі обертання; довжина основної секції стрілової системи; вільного падіння; L l - довжина підвісу вантажу; g - прискорення 0 - початкове значення кута повороту основної секції стрілової системи; 1 UA 100059 U Б - базисна функція зміни кутової координати переміщення основної секції стрілової системи; Б - базисна функція кутової координати відхилення вантажу від вертикалі. Розв'язавши оптимізаційну задачу прямим варіаційним методом отримано закон зміни кутової координати переміщення основної секції стрілової системи. 5 252t 5 1386t 4t1 3080t 3t12 3465t 2t13 1980tt14 462t15 0 T t 6 0 11 t1 5 4 5 4 2772 t t t1 0 t 13860 t t t1 2t t1 0 t 1 1 a1 a2 11 11 t1 t1 27720 t 3 t t1 3 9t 2 9tt1 2t12 0 t 1 ., a3 11 t1 де t - значення кутової координати в кінці періоду руху; a1 , a 2 , a 3 - параметри функції. 1 10 Отриманий закон являє собою оптимальний режим руху, що забезпечує мінімум динамічних навантажень, усуває коливання вантажу після зупинки стрілової системи (Граф. 1-3). Корисна модель дає змогу, зменшити енергоємність технологічного процесу, подовжити строк служби та запобігти передчасному руйнуванню механізму зменшенням динамічних навантажень системи. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 Пристрій керування приводом переміщення шарнірно-зчленованої стрілової баштового крана, що містить асинхронний електродвигун, муфту, гальмівний механізм, редуктор, канатний барабан, поліспаст, який відрізняється тим, що додатково монтується мікроконтролер та частотний перетворювач. 2 UA 100059 U Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюLoveikin Viacheslav Serhiiovych, Shevchuk Oleksandr Hryhorovych
Автори російськоюЛовейкин Вячеслав Сергеевич, Шевчук Александр Григорьевич
МПК / Мітки
МПК: B66C 23/64
Мітки: шарнірно-зчленованої, переміщення, керування, крана, баштового, пристрій, системі, приводом, стрілової
Код посилання
<a href="https://ua.patents.su/5-100059-pristrijj-keruvannya-privodom-peremishhennya-sharnirno-zchlenovano-strilovo-sistemi-bashtovogo-krana.html" target="_blank" rel="follow" title="База патентів України">Пристрій керування приводом переміщення шарнірно-зчленованої стрілової системи баштового крана</a>
Шарнірно-зчленована стрілова система баштового крана
Номер патенту: 9086
Опубліковано: 15.09.2005
Автори: Ловейкін Вячеслав Сергійович, Пономаренко Олександр Володимирович, Татарчук Микола Миколайович, Ярошенко Володимир Федорович
МПК: B66C 23/06
Мітки: крана, шарнірно-зчленована, баштового, стрілова, система
Формула / Реферат:
Шарнірно-зчленована стрілова система баштового крана, що містить поворотну платформу зі стояком, підйомну стрілу, шарнірно зчленовану з ріжком із трикутною консоллю, на горизонтальній частині якого розміщено каретку, що з'єднана через гнучкий підвіс із вантажем, яка відрізняється тим, що ріжок з'єднано зі стріловою системою чотириланковим механізмом, виконаним у вигляді паралелограма з попарно паралельними ланками: підйомна стріла - гнучка...
Механізм зміни вильоту стрілової системи крана з горизонтальним переміщенням вантажу
Номер патенту: 16131
Опубліковано: 17.07.2006
Автори: Ловейкін Вячеслав Сергійович, Ярошенко Володимир Федорович, Паламарчук Дмитро Анатолійович
МПК: B66C 19/00
Мітки: вильоту, горизонтальним, механізм, крана, переміщенням, вантажу, стрілової, зміни, системі
Формула / Реферат:
Механізм зміни вильоту стрілової системи крана з горизонтальним переміщенням вантажу, що містить хобот, контрхобот, жорстку відтяжку, вантажний канат та стрілу, який відрізняється тим, що з кронштейном, який є продовженням жорсткої відтяжки, жорстко з'єднаний некруглий зубчастий сектор, що перебуває в постійному зачепленні з некруглим зубчастим колесом, з'єднаним з редуктором електродвигуна з можливістю отримання обертового моменту.
Механізм зміни вильоту стрілової системи крана з горизонтальним переміщенням вантажу
Номер патенту: 16134
Опубліковано: 17.07.2006
Автори: Ловейкін Вячеслав Сергійович, Ярошенко Володимир Федорович, Паламарчук Дмитро Анатолійович
МПК: B66C 19/00
Мітки: зміни, механізм, горизонтальним, переміщенням, вантажу, системі, вильоту, стрілової, крана
Формула / Реферат:
Механізм зміни вильоту стрілової системи крана з горизонтальним переміщенням вантажу, що складається із хобота, контрхобота, жорсткої відтяжки, вантажного каната та стріли, який відрізняється тим, що містить поліспаст підйому стріли, який однією блочною обоймою закріплений до стріли, а другою блочною обоймою - до нерухомого стояка, причому вільний кінець каната поліспасту через обвідні блоки заведений на поверхню нециліндричного барабана,...
Механізм зміни вильоту стрілової системи крана з горизонтальним переміщенням вантажу
Номер патенту: 16133
Опубліковано: 17.07.2006
Автори: Паламарчук Дмитро Анатолійович, Ловейкін Вячеслав Сергійович, Ярошенко Володимир Федорович
МПК: B66C 19/00
Мітки: системі, переміщенням, крана, зміни, горизонтальним, вильоту, вантажу, стрілової, механізм
Формула / Реферат:
Механізм зміни вильоту стрілової системи крана з горизонтальним переміщенням вантажу, що складається із хобота, контрхобота, жорсткої відтяжки, вантажного каната та стріли, який відрізняється тим, що на кронштейнах противаги жорстко закріплені некруглі зубчасті сектори, що перебувають в постійному зачепленні з некруглими зубчастими колесами, з'єднаними з редуктором електродвигуна з можливістю отримання обертового моменту від нього, причому...
Пристрій для керування приводом механізму переміщення візка крана
Номер патенту: 50540
Опубліковано: 10.06.2010
Автори: Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович
МПК: B66C 13/00
Мітки: крана, візка, керування, механізму, пристрій, переміщення, приводом
Формула / Реферат:
Пристрій для керування приводом механізму переміщення візка крана, що містить датчик довжини гнучкого підвісу, датчик швидкості руху візка і частотний перетворювач, який відрізняється тим, що додатково обладнаний пультом керування та бортовим комп'ютером, до якого підключені всі датчики.
Попередній патент: Безконтактна система запалювання
Наступний патент: Спосіб підготовки товстої кишки до відеоколоноскопії
Випадковий патент: Спосіб закупорювання пляшок бугельними пробками і установка для здійснення способу