Автоматичний магнітний захоплювач
Номер патенту: 101570
Опубліковано: 10.04.2013
Автори: Козлов Михайло Іванович, Садовой Олександр Валентинович
Формула / Реферат
Автоматичний магнітний захоплювач, що містить повзун чотиритактного механізму фіксації, що навішаний на гак крана і установлений з можливістю вертикального переміщення в основі, яка прикріплена до основного корпусу з розміщеними в ньому постійними магнітами, і механізм відриву, що містить шарнірно з'єднані з верхньою частиною основного корпусу віджимні важелі, малі плечі яких обладнані віджимними елементами, а більші плечі кінематично пов'язані з кінцями поперечини, жорстко прикріпленої до повзуна, який відрізняється тим, що захоплювач обладнаний принаймні двома додатковими корпусами з постійними магнітами, які розташовані по різні боки від основного корпусу і прикріплені до нього з можливістю зміни та фіксації їхнього положення, при цьому поперечина прикріплена до повзуна в самій нижній його частині, важелі розташовані безпосередньо по різні сторони від повзуна, їхні віджимні елементи малих плечей виконані Т-подібної форми, а їхні більші плечі вільно опираються на ролики, осі яких прикріплені до кінців поперечини.
Текст
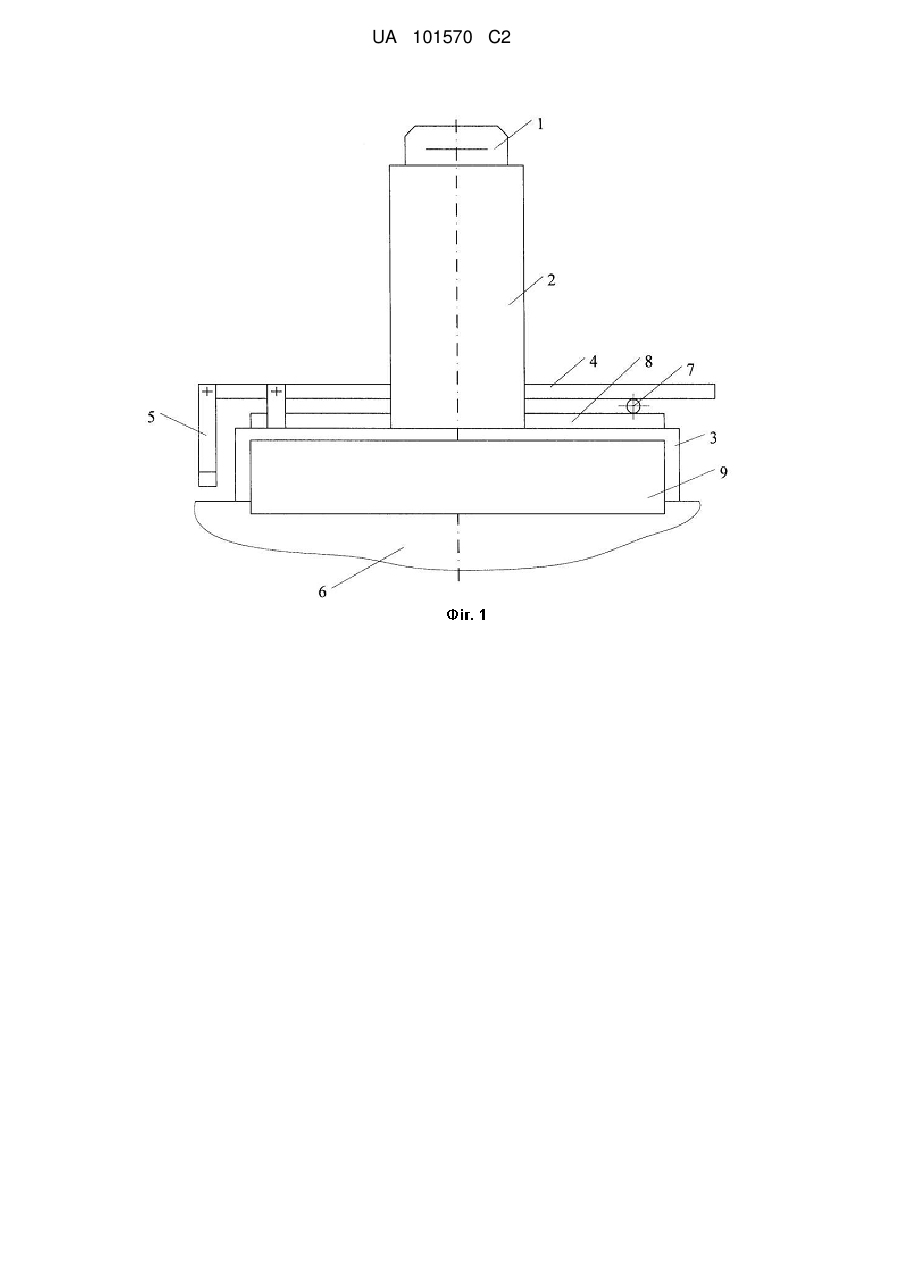
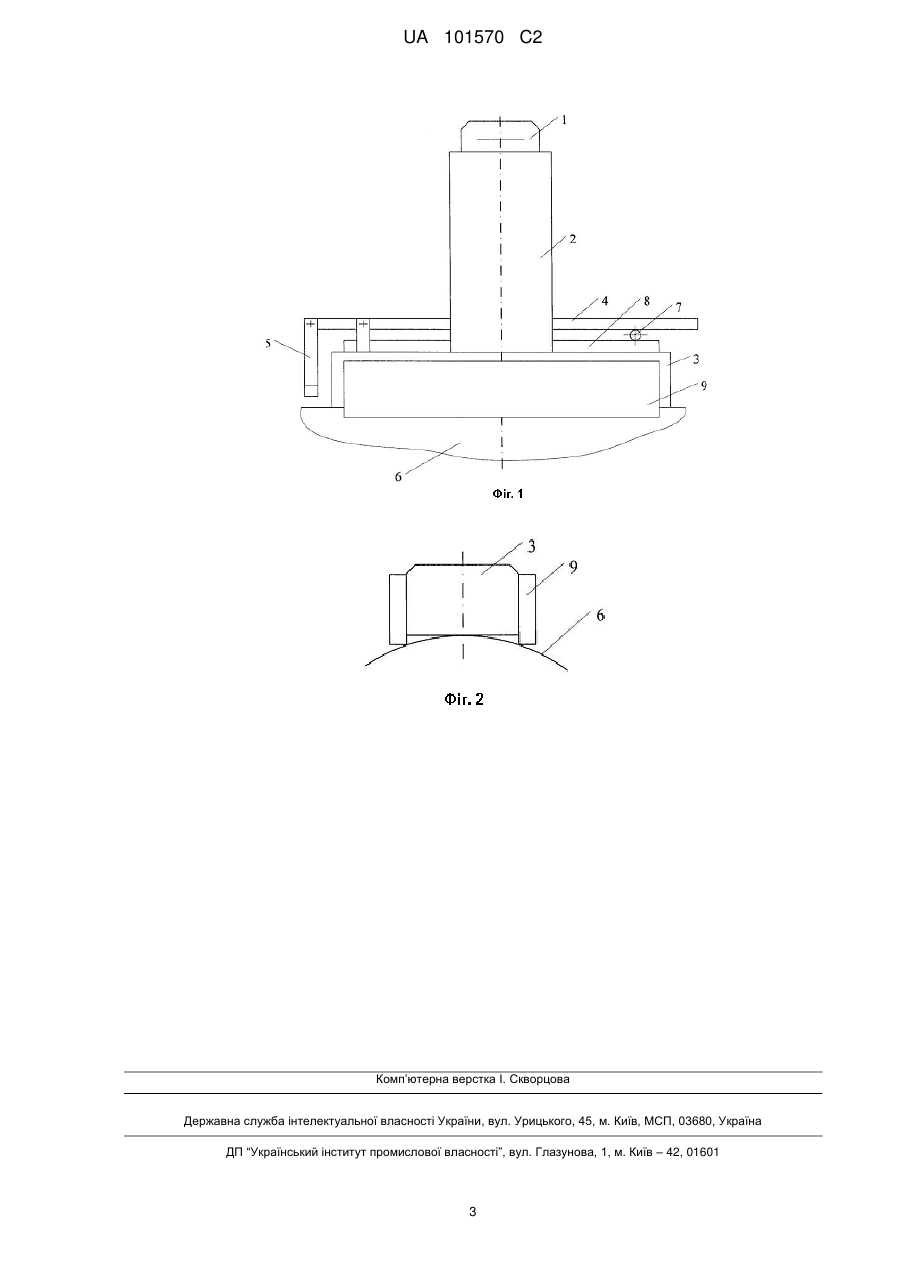
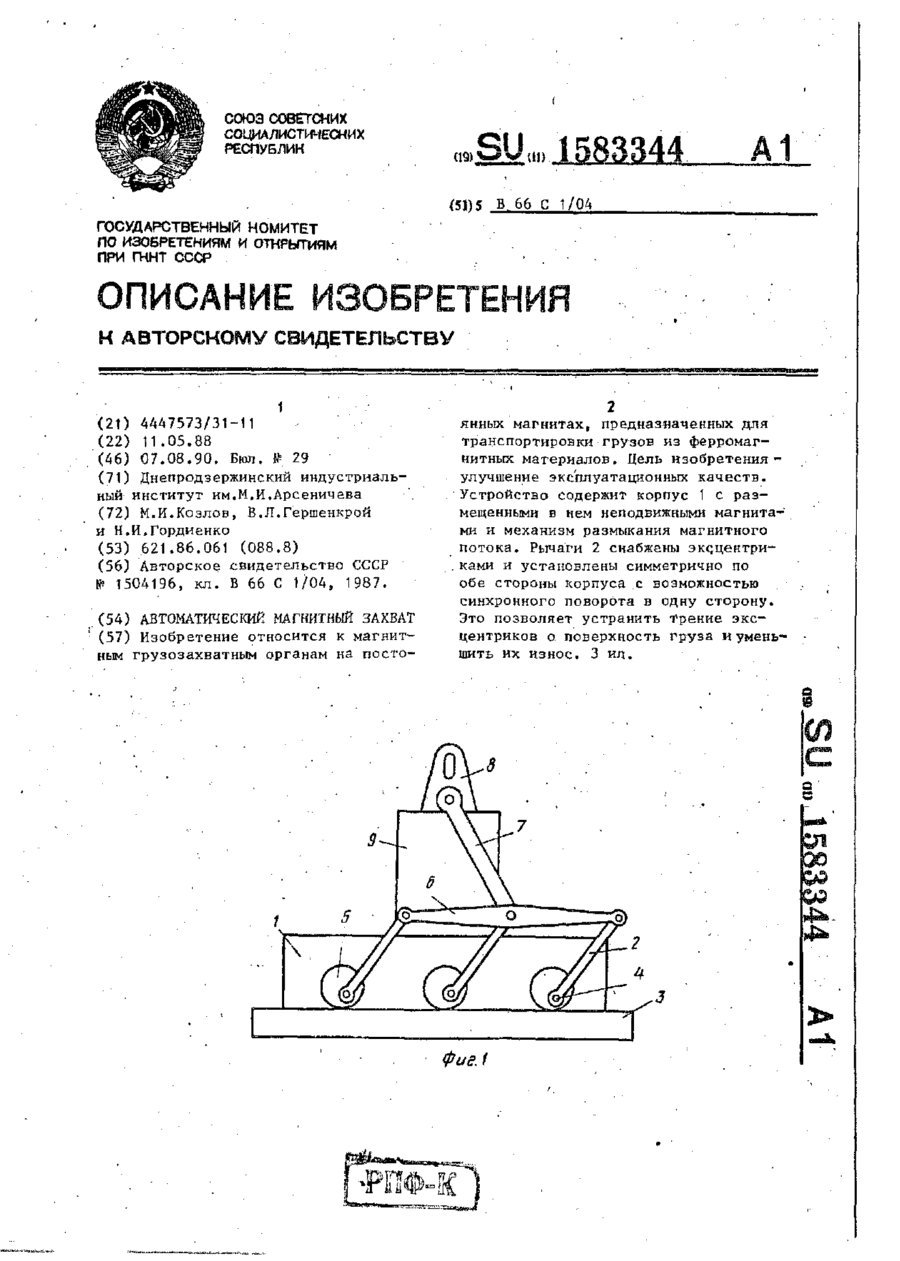
Реферат: Винахід належить до підйомно-транспортної техніки. Автоматичний магнітний захоплювач містить повзун, встановлений з можливістю вертикального переміщення в основі. Остання прикріплена до основного корпусу з розміщеними в ньому постійними магнітами і механізм відриву, що містить шарнірно з'єднані з верхньою частиною основного корпусу віджимні важелі. Малі плечі важелів обладнані віджимними елементами, а більші плечі кінематично пов'язані з кінцями поперечини, жорстко прикріпленої до повзуна. Захоплювач обладнаний принаймні двома додатковими корпусами з постійними магнітами, які розташовані по різні боки від основного корпусу і прикріплені до нього з можливістю зміни та фіксації їхнього положення. Поперечина прикріплена до повзуна в самій нижній його частині. Важелі розташовані безпосередньо по різні сторони від повзуна. Їхні віджимні елементи малих плечей виконані Тподібної форми, а їхні більші плечі вільно опираються на ролики, осі яких прикріплені до кінців поперечини. Технічним результатом є можливість транспортування як труб різних розмірів, так й листів. UA 101570 C2 (12) UA 101570 C2 UA 101570 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до підйомно-транспортуючих пристроїв на постійних магнітах і може бути використаний для транспортування металовиробів, переважно труб великого діаметру. Відомий магнітний захоплювач, що містить повзун чотиритактного механізму фіксації, що навішаний на гак крана і установлений з можливістю вертикального переміщення в основі, яка прикріплена до основного корпусу з розміщеними в ньому постійними магнітами, і механізм відриву, що включає шарнірно приєднані до корпусу із протилежних сторін віджимні елементи, які кінематично приєднані до повзуна, при цьому віджимні елементи виконані у вигляді ексцентриків, а кінематичний механізм включає горизонтальне коромисло й з'єднані з ним важелі й тягу, одним кінцем з'єднану із серединою коромисла, а іншим кінцем - з повзуном [патент України № 1836, В66С 1/00, 1994]. Недоліком відомого пристрою є відсутність можливості транспортування довгомірних виробів. Найбільш близьким (прототипом) до пристрою, що заявляється, є автоматичний магнітний захоплювач, що містить повзун чотиритактного механізму фіксації, який навішаний на гак крана і установлений з можливістю вертикального переміщення в основі, яка прикріплена до основного корпусу з розміщеними в ньому постійними магнітами і механізм відриву, що включає розташовані по різні сторони від повзуна й шарнірно з'єднані з верхньою частиною основного корпуса віджимні важелі, малі плечі яких обладнані роликами, а більші плечі кінематично пов'язані з кінцями поперечини, жорстко прикріпленої до повзуна, і додатковий корпус, що охоплює бічну поверхню основного корпусу й виконаний з можливістю вертикального переміщення відносно останнього при обмеженому переміщенні вниз і силової взаємодії, з одного боку, з вантажем, що транспортується, а з іншого боку, з роликом кожного важеля [патент України № 9533, В66С1/00, 1996]. Недоліком прототипу є відсутність можливості транспортування труб великого діаметра. В основу винаходу поставлена задача вдосконалення автоматичного магнітного захоплювача шляхом зміни конструкції магнітної системи за рахунок оснащення основного корпусу додатковими корпусами з постійними магнітами, які прикріплені до нього з можливістю зміни та фіксації їхнього вертикального положення при необхідності транспортування металовиробів різних габаритних розмірів. Поставлена задача вирішується тим, що в автоматичному магнітному захоплювачі, який містить повзун чотиритактного механізму фіксації, що навішаний на гак крана і установлений з можливістю вертикального переміщення в основі, яка прикріплена до основного корпусу з розміщеними в ньому постійними магнітами, і механізм відриву, що включає розташовані по різні сторони від повзуна і шарнірно з'єднані з верхньою частиною основного корпусу віджимні важелі, малі плечі яких обладнані віджимними елементами, а більші плечі кінематично пов'язані з кінцями поперечини, жорстко прикріпленої до повзуна, захоплювач оснащений принаймні двома додатковими корпусами з постійними магнітами, які розташовані по різні сторони від основного корпусу і прикріплені до нього з можливістю зміни та фіксації їхнього нового положення, при цьому поперечина прикріплена до повзуна в самій нижній його частині, важелі розташовані безпосередньо по різні сторони від повзуна, їхні малі плечі обладнані віджимними елементами Т-подібної форми, а їхні більші плечі вільно опираються на ролики, осі яких прикріплені до кінців поперечини. Наявність в запропонованому автоматичному магнітному захоплювачі додаткових корпусів з постійними магнітами, які мають можливість зміни положення та фіксації їх відносно основного корпусу, дозволяє мати можливість зміни форми основи магнітної системи захоплювача при зміні розмірів виробів, що транспортуються, тобто, це дозволяє зробити захоплювач більш універсальним і транспортувати як труби різних діаметрів, так і листи. На фіг. 1 зображений автоматичний магнітний захоплювач, загальний вид; на фіг. 2 розташування основного і додаткових корпусів на зовнішній поверхні труби. Автоматичний магнітний захоплювач містить повзун 1 чотиритактного механізму фіксації, який навішується на гак крана і установлений з можливістю вертикального переміщення в основі 2, яка прикріплена до основного корпусу 3 з розміщеними в ньому постійними магнітами. Захоплювач має механізм відриву, що включає розташовані між стінками основи 2 по різні сторони від повзуна 1, й шарнірно з'єднані з верхньою частиною основного корпусу 3 віджимні важелі 4, малі плечі яких обладнані віджимними елементами 5 Т-подібної форми, що мають можливість силової взаємодії з вантажем 6, який транспортується. Більші плечі важелів 4 вільно опираються на ролики 7, осі яких прикріплені до кінців поперечини 8, яка також розміщена між стінками основи 2 і прикріплена до повзуна 1 у самій нижній його частині. Для простоти елементи механізму відриву показані тільки з одного боку захоплювача. До основного корпусу 3 1 UA 101570 C2 5 10 15 20 25 прикріплені принаймні два додаткових корпуси 9 з постійними магнітами, які розташовані по різні сторони і прикріплені до нього з можливістю зміни та фіксації їхнього нового положення. Автоматичний магнітний захоплювач працює таким чином. У вихідному стані захоплювач навішаний на гак крана. При цьому повзун 1 займає крайнє верхнє положення, важелі 4 знаходяться під деяким кутом до горизонту. При цьому віджимні елементи 5 виступають за межі основи магнітної системи захоплювача. У такому стані автоматичний магнітний захоплювач опускають на поверхню вантажу 6. Першим торкаються вантажу 6 віджимні елементи 5. При цьому сила магнітного поля, що збільшується в міру зменшення відстані між вантажем 6 і магнітною системою захоплювача передається через віджимні елементи 5 на малі плечі важелів 4, що дозволяє здійснити плавне опускання захоплювача на вантаж 6, і зм'якшити удари магнітної системи захоплювача при зустрічі з ним. Вантаж 6 захоплюється магнітною системою захоплювача, повзун 1 опускається в крайнє нижнє положення й при своєму ході здійснює автоматичну фіксацію важелів 4 від повороту. Захоплювач піднімають для транспортування до місця розвантаження. При цьому повзун 1 за принципом дії механізму фіксації частково за рахунок вільного ходу переміщується угору відносно основи 2 і займає проміжне положення, при якому віджимні елементи 5 не торкаються поверхні вантажу 6. Захоплювач транспортують і опускають на розвантажувальну площадку. Повзун 1 переміщується в крайнє нижнє положення і при своєму ході здійснює автоматичне перемикання механізму фіксації важелів 4 від повороту. При наступному підйомі захоплювача повзун 1 при своєму русі в крайнє верхнє положення захоплює за собою поперечину 8 і важелі 4, малі плечі яких передають зусилля відриву через віджимні елементи 5 вантажу 6, і відривають захоплювач від вантажу 6. Захоплювач переносять до місця завантаження й цикл роботи повторюється. При необхідності транспортування вантажів у вигляді листів захоплювач опускають на поверхню листа і ослабляють фіксацію основного блока 3 і додаткових блоків 9. Всі блоки опускаються на поверхню листа. Після фіксації блоків захоплювач має готовність для транспортування цього листа. Запропонований автоматичний захоплювач є більш універсальним у порівнянні із прототипом тому, що дозволяє здійснювати транспортування як листів металу, так і труб великих діаметрів. 30 ФОРМУЛА ВИНАХОДУ 35 40 Автоматичний магнітний захоплювач, що містить повзун чотиритактного механізму фіксації, що навішаний на гак крана і установлений з можливістю вертикального переміщення в основі, яка прикріплена до основного корпусу з розміщеними в ньому постійними магнітами, і механізм відриву, що містить шарнірно з'єднані з верхньою частиною основного корпусу віджимні важелі, малі плечі яких обладнані віджимними елементами, а більші плечі кінематично пов'язані з кінцями поперечини, жорстко прикріпленої до повзуна, який відрізняється тим, що захоплювач обладнаний принаймні двома додатковими корпусами з постійними магнітами, які розташовані по різні боки від основного корпусу і прикріплені до нього з можливістю зміни та фіксації їхнього положення, при цьому поперечина прикріплена до повзуна в самій нижній його частині, важелі розташовані безпосередньо по різні сторони від повзуна, їхні віджимні елементи малих плечей виконані Т-подібної форми, а їхні більші плечі вільно опираються на ролики, осі яких прикріплені до кінців поперечини. 2 UA 101570 C2 Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюAutomatic magnetic gripper
Автори англійськоюSadovoi Oleksandr Valentynovych, Kozlov Mykhailo Ivanovych
Назва патенту російськоюАвтоматический магнитный захват
Автори російськоюСадовой Олександр Валентинович, Козлов Михаил Иванович
МПК / Мітки
МПК: B66C 1/04
Мітки: магнітний, автоматичний, захоплювач
Код посилання
<a href="https://ua.patents.su/5-101570-avtomatichnijj-magnitnijj-zakhoplyuvach.html" target="_blank" rel="follow" title="База патентів України">Автоматичний магнітний захоплювач</a>
Автоматичний магнітний захоплювач
Номер патенту: 70961
Опубліковано: 25.06.2012
Автори: Садовой Олександр Валентинович, Козлов Михайло Іванович
МПК: B66C 1/04
Мітки: захоплювач, магнітний, автоматичний
Формула / Реферат:
Автоматичний магнітний захоплювач, що містить повзун чотиритактного механізму фіксації, що навішаний на гак крана і установлений з можливістю вертикального переміщення в основі, яка прикріплена до основного корпусу з розміщеними в ньому постійними магнітами, і механізм відриву, що включає розташовані по різні сторони від повзуна і шарнірно з'єднані з верхньою частиною основного корпусу віджимні важелі, малі плечі яких обладнані віджимними...
Автоматичний магнітний захоплювач
Номер патенту: 65032
Опубліковано: 25.11.2011
Автори: Садовой Олександр Валентинович, Козлов Михайло Іванович
МПК: B66C 1/04
Мітки: автоматичний, захоплювач, магнітний
Формула / Реферат:
Автоматичний магнітний захоплювач, який містить повзун чотиритактного механізму фіксації, що навішаний на гак крана і установлений з можливістю вертикального переміщення в основі, яка прикріплена до основного корпусу з розміщеними в ньому постійними магнітами, і механізм відриву, що включає розташовані по різні сторони від повзуна й шарнірно з'єднані з верхньою частиною основного корпусу віджимні важелі, малі плечі яких обладнані роликами, а...
Автоматичний магнітний захоплювач
Номер патенту: 74198
Опубліковано: 25.10.2012
Автори: Садовой Олександр Валентинович, Козлов Михайло Іванович
МПК: B66C 1/04
Мітки: магнітний, автоматичний, захоплювач
Формула / Реферат:
1. Автоматичний магнітний захоплювач, що містить повзун з механізмом фіксації, який навішаний на гак крана і установлений з можливістю вертикального переміщення в основі, яка прикріплена до основного корпусу, і механізм відриву, що включає розташовані по різні сторони від повзуна і шарнірно з'єднані з верхньою частиною основного корпусу відтискні важелі і тяги, які одним кінцем шарнірно прикріплені до великих плечей важелів, малі плечі яких...
Магнітний захоплювач
Номер патенту: 65031
Опубліковано: 25.11.2011
Автори: Козлов Михайло Іванович, Садовой Олександр Валентинович
МПК: B66C 1/04
Мітки: магнітний, захоплювач
Формула / Реферат:
Магнітний захоплювач, що містить повзун з механізмом фіксації, який навішаний на гак крана і установлений з можливістю вертикального переміщення в основі, яка прикріплена до основного корпусу з розміщеними в ньому постійними магнітами, і механізм відриву, що включає розташовані по різні сторони від повзуна й шарнірно з'єднані з верхньою частиною основного корпусу віджимні важелі, малі плечі яких обладнані роликами, а більші плечі кінематично...
Автоматичний магнітний захоплювач
Номер патенту: 1836
Опубліковано: 20.12.1994
Автори: Гершенкрой Володимир Леонідович, Козлов Михайло Іванович, Гордієнко Микола Іванович
МПК: B66C 1/00
Мітки: магнітний, автоматичний, захоплювач
Формула / Реферат:
Автоматический магнитный захват, содержащий навешиваемый на крюк крана посредством серьги ползун четырехтактного механизма фиксации, корпус с размещенными в нем постоянными магнитами и механизм отрыва, включающий шарнирно закрепленные на противоположных сторонах корпуса отжимные элементы, кинематически соединенные с ползуном четырехтактного механизма фиксации, отличающийся тем, что, с целью повышения эксплуатационных качеств, отжимные...
Попередній патент: Складаний предмет меблів
Наступний патент: Спосіб одержання металевих заготовок з глобулярною структурою
Випадковий патент: Пристрій для визначення величини кута сходження утворюючих при формуванні судинного анастомозу за методом "кінець у бік"