Автоматичний магнітний захоплювач
Номер патенту: 74198
Опубліковано: 25.10.2012
Автори: Козлов Михайло Іванович, Садовой Олександр Валентинович

Формула / Реферат
1. Автоматичний магнітний захоплювач, що містить повзун з механізмом фіксації, який навішаний на гак крана і установлений з можливістю вертикального переміщення в основі, яка прикріплена до основного корпусу, і механізм відриву, що включає розташовані по різні сторони від повзуна і шарнірно з'єднані з верхньою частиною основного корпусу відтискні важелі і тяги, які одним кінцем шарнірно прикріплені до великих плечей важелів, малі плечі яких оснащені відтискними елементами, а інші кінці тяг шарнірно з'єднані з кінцями поперечини, жорстко прикріпленої до повзуна, додатковий корпус і постійні магніти, який відрізняється тим, що основний і додатковий корпуси виконані у вигляді частини труби великого діаметра, при цьому додатковий корпус прикріплений до основного корпусу знизу, з можливістю заміни на інший, а постійні магніти об'єднані в окремі блоки і закріплені на нижній поверхні додаткового корпусу паралельними рядами, причому сусідні блоки в рядах і сусідні блоки в сусідніх рядах мають протилежну полярність, а відтискні елементи мають Т-подібну форму.
2. Автоматичний магнітний захоплювач за п. 1, який відрізняється тим, що додатковий корпус виконаний принаймні з трьох частин, які шарнірно з'єднані між собою, середня з яких прикріплена до основного корпусу, а інші частини з'єднані з середньою частиною з можливістю вільної зміни положення і фіксації.
Текст
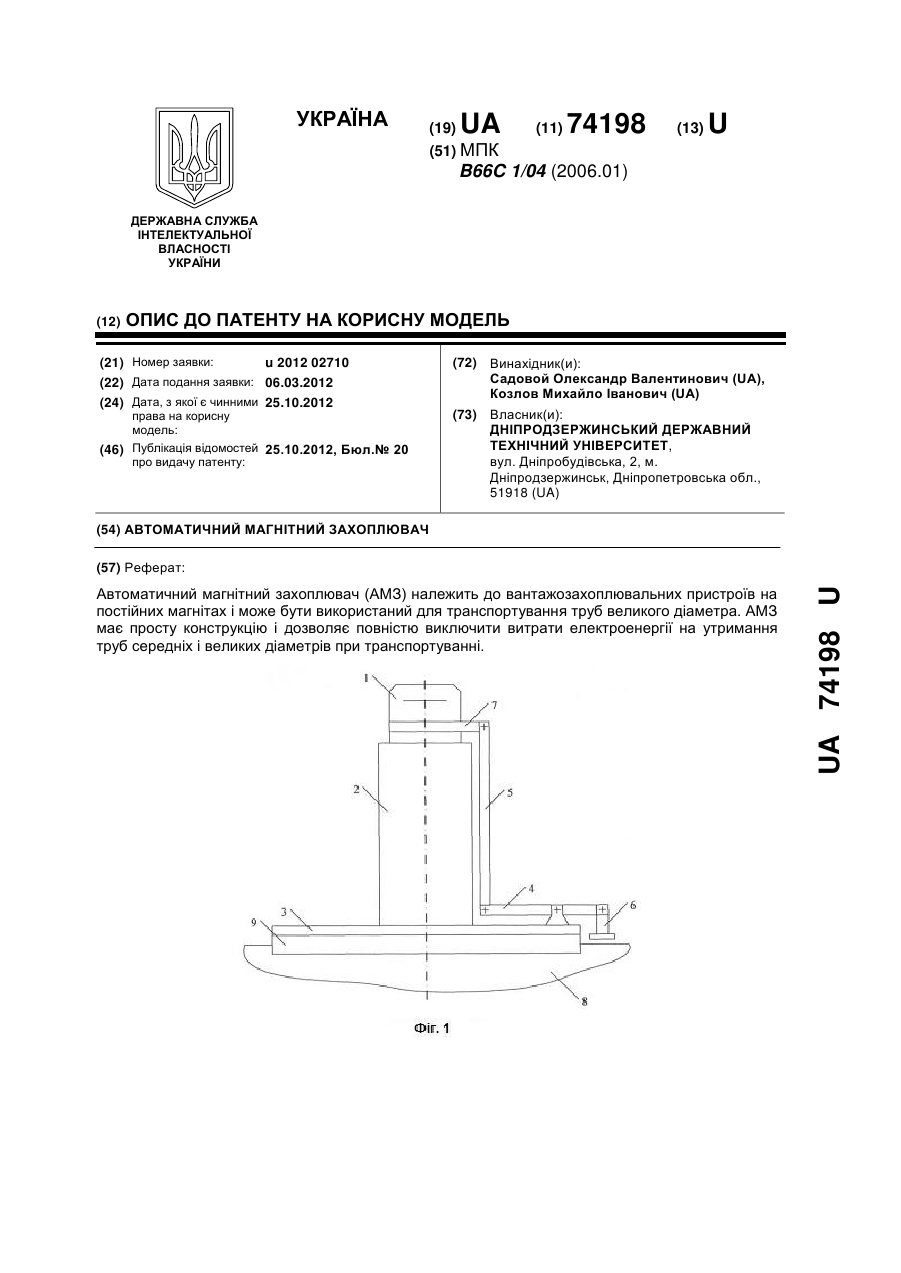
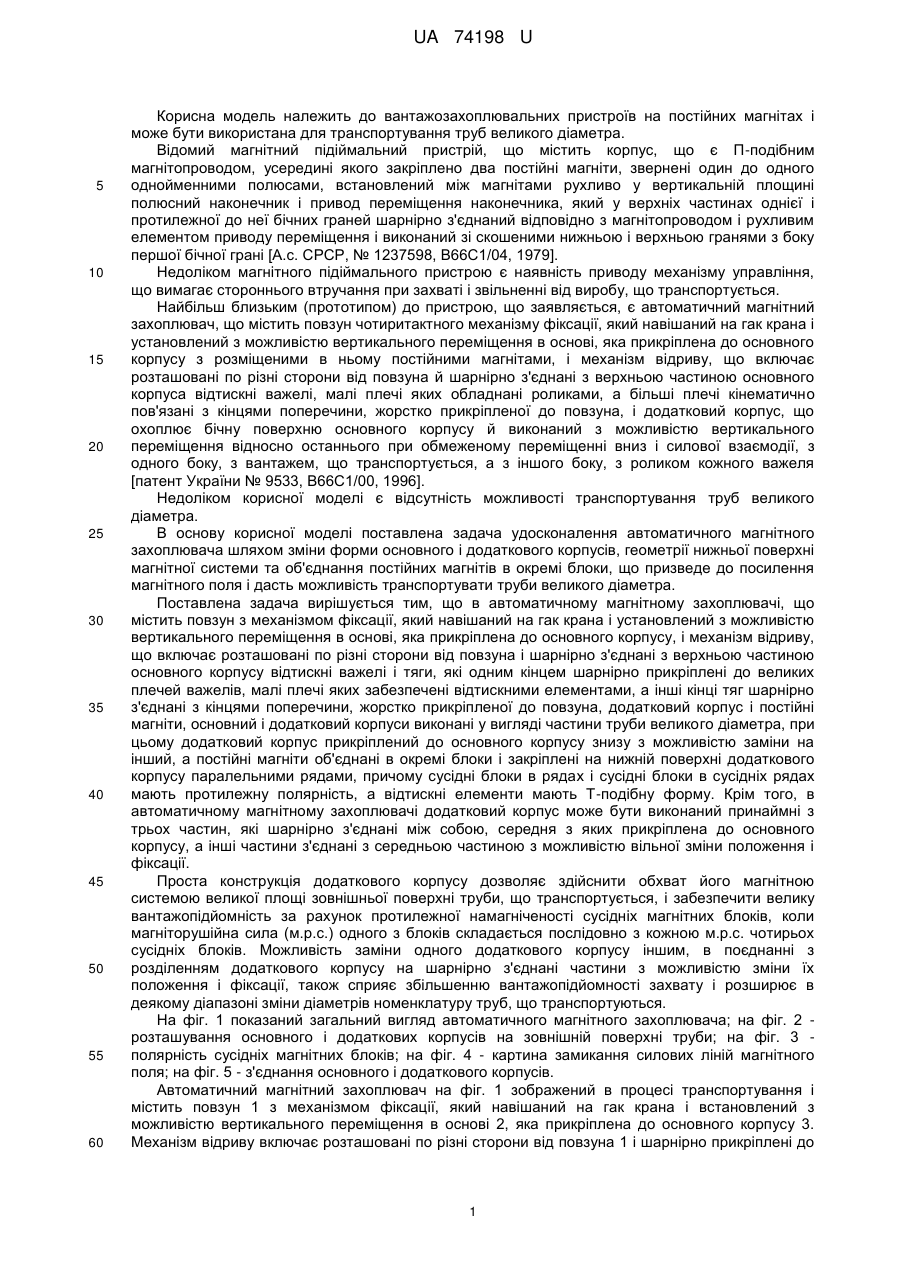
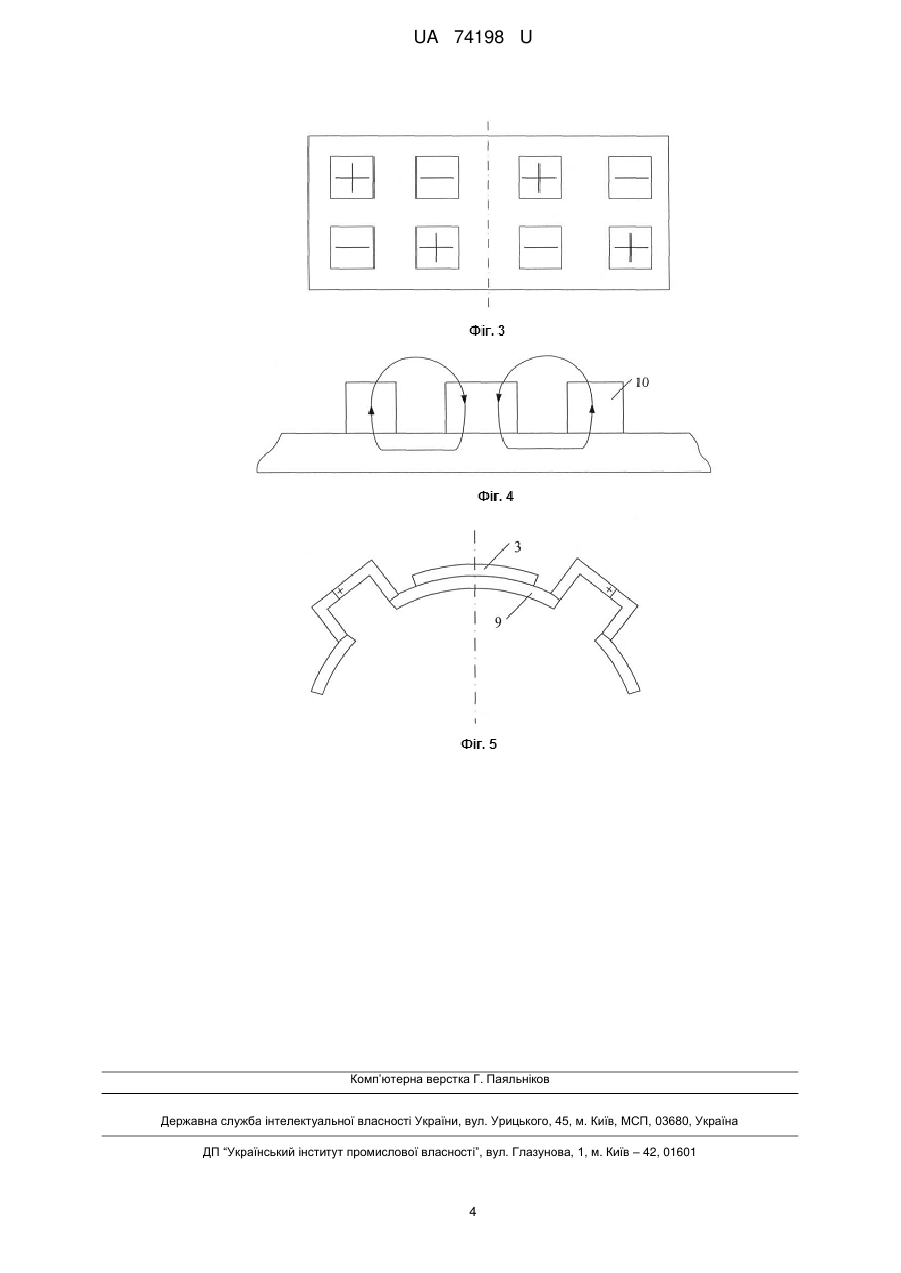
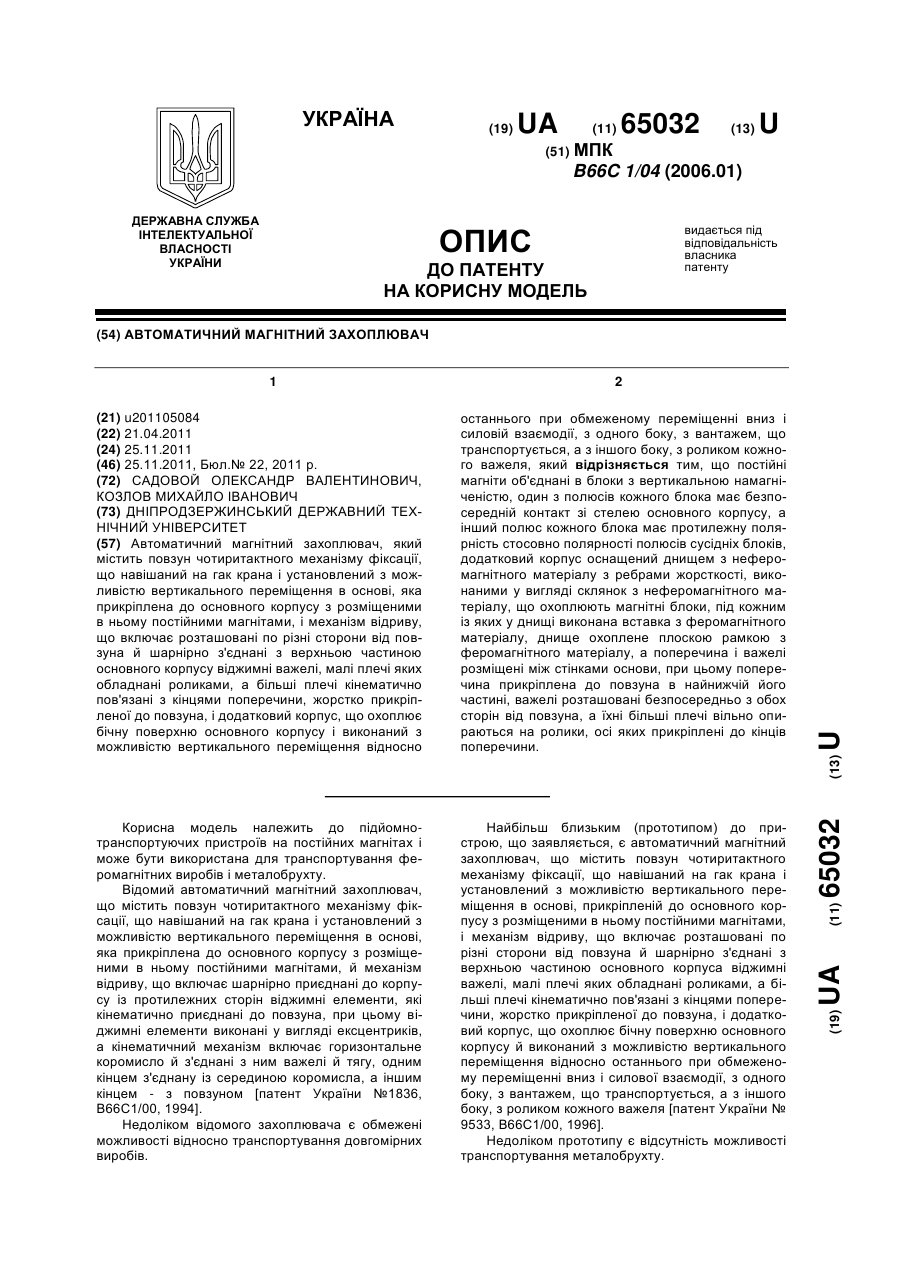
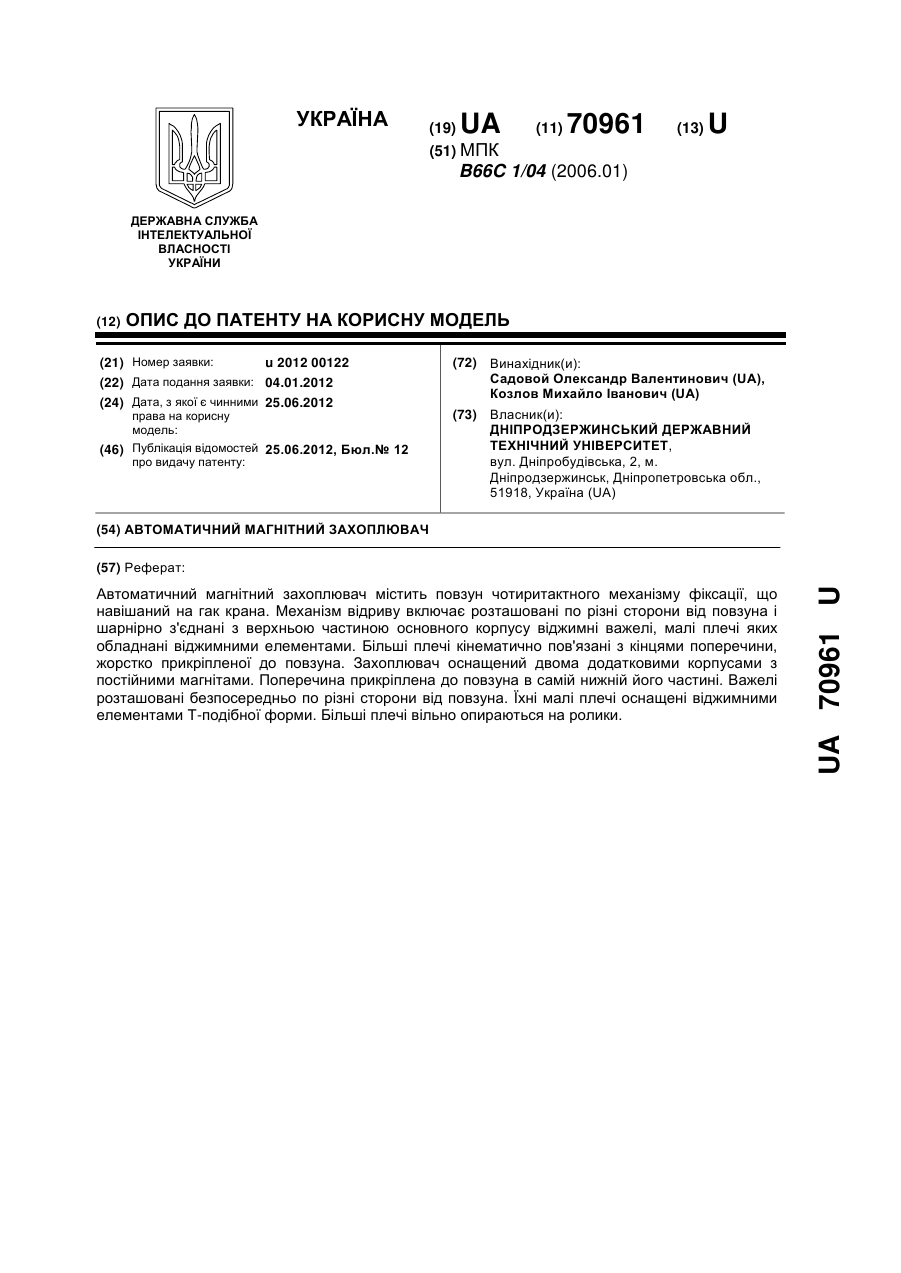
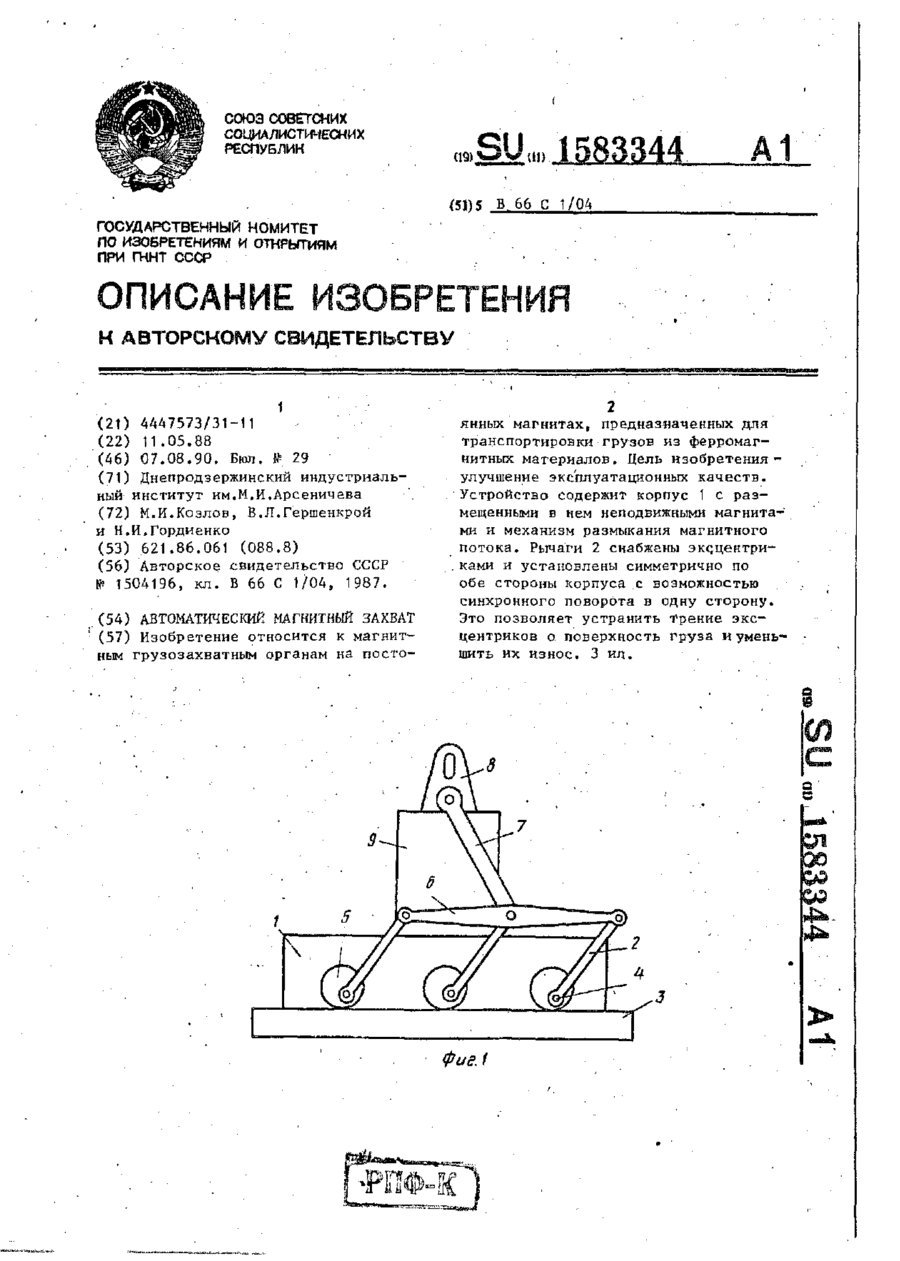
Реферат: UA 74198 U UA 74198 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до вантажозахоплювальних пристроїв на постійних магнітах і може бути використана для транспортування труб великого діаметра. Відомий магнітний підіймальний пристрій, що містить корпус, що є П-подібним магнітопроводом, усередині якого закріплено два постійні магніти, звернені один до одного однойменними полюсами, встановлений між магнітами рухливо у вертикальній площині полюсний наконечник і привод переміщення наконечника, який у верхніх частинах однієї і протилежної до неї бічних граней шарнірно з'єднаний відповідно з магнітопроводом і рухливим елементом приводу переміщення і виконаний зі скошеними нижньою і верхньою гранями з боку першої бічної грані [А.с. СРСР, № 1237598, В66С1/04, 1979]. Недоліком магнітного підіймального пристрою є наявність приводу механізму управління, що вимагає стороннього втручання при захваті і звільненні від виробу, що транспортується. Найбільш близьким (прототипом) до пристрою, що заявляється, є автоматичний магнітний захоплювач, що містить повзун чотиритактного механізму фіксації, який навішаний на гак крана і установлений з можливістю вертикального переміщення в основі, яка прикріплена до основного корпусу з розміщеними в ньому постійними магнітами, і механізм відриву, що включає розташовані по різні сторони від повзуна й шарнірно з'єднані з верхньою частиною основного корпуса відтискні важелі, малі плечі яких обладнані роликами, а більші плечі кінематично пов'язані з кінцями поперечини, жорстко прикріпленої до повзуна, і додатковий корпус, що охоплює бічну поверхню основного корпусу й виконаний з можливістю вертикального переміщення відносно останнього при обмеженому переміщенні вниз і силової взаємодії, з одного боку, з вантажем, що транспортується, а з іншого боку, з роликом кожного важеля [патент України № 9533, В66С1/00, 1996]. Недоліком корисної моделі є відсутність можливості транспортування труб великого діаметра. В основу корисної моделі поставлена задача удосконалення автоматичного магнітного захоплювача шляхом зміни форми основного і додаткового корпусів, геометрії нижньої поверхні магнітної системи та об'єднання постійних магнітів в окремі блоки, що призведе до посилення магнітного поля і дасть можливість транспортувати труби великого діаметра. Поставлена задача вирішується тим, що в автоматичному магнітному захоплювачі, що містить повзун з механізмом фіксації, який навішаний на гак крана і установлений з можливістю вертикального переміщення в основі, яка прикріплена до основного корпусу, і механізм відриву, що включає розташовані по різні сторони від повзуна і шарнірно з'єднані з верхньою частиною основного корпусу відтискні важелі і тяги, які одним кінцем шарнірно прикріплені до великих плечей важелів, малі плечі яких забезпечені відтискними елементами, а інші кінці тяг шарнірно з'єднані з кінцями поперечини, жорстко прикріпленої до повзуна, додатковий корпус і постійні магніти, основний і додатковий корпуси виконані у вигляді частини труби великого діаметра, при цьому додатковий корпус прикріплений до основного корпусу знизу з можливістю заміни на інший, а постійні магніти об'єднані в окремі блоки і закріплені на нижній поверхні додаткового корпусу паралельними рядами, причому сусідні блоки в рядах і сусідні блоки в сусідніх рядах мають протилежну полярність, а відтискні елементи мають Т-подібну форму. Крім того, в автоматичному магнітному захоплювачі додатковий корпус може бути виконаний принаймні з трьох частин, які шарнірно з'єднані між собою, середня з яких прикріплена до основного корпусу, а інші частини з'єднані з середньою частиною з можливістю вільної зміни положення і фіксації. Проста конструкція додаткового корпусу дозволяє здійснити обхват його магнітною системою великої площі зовнішньої поверхні труби, що транспортується, і забезпечити велику вантажопідйомність за рахунок протилежної намагніченості сусідніх магнітних блоків, коли магніторушійна сила (м.р.с.) одного з блоків складається послідовно з кожною м.р.с. чотирьох сусідніх блоків. Можливість заміни одного додаткового корпусу іншим, в поєднанні з розділенням додаткового корпусу на шарнірно з'єднані частини з можливістю зміни їх положення і фіксації, також сприяє збільшенню вантажопідйомності захвату і розширює в деякому діапазоні зміни діаметрів номенклатуру труб, що транспортуються. На фіг. 1 показаний загальний вигляд автоматичного магнітного захоплювача; на фіг. 2 розташування основного і додаткових корпусів на зовнішній поверхні труби; на фіг. 3 полярність сусідніх магнітних блоків; на фіг. 4 - картина замикання силових ліній магнітного поля; на фіг. 5 - з'єднання основного і додаткового корпусів. Автоматичний магнітний захоплювач на фіг. 1 зображений в процесі транспортування і містить повзун 1 з механізмом фіксації, який навішаний на гак крана і встановлений з можливістю вертикального переміщення в основі 2, яка прикріплена до основного корпусу 3. Механізм відриву включає розташовані по різні сторони від повзуна 1 і шарнірно прикріплені до 1 UA 74198 U 5 10 15 20 25 30 35 40 45 50 верхньої частини основного корпусу 3 відтискні важелі 4 і тяги 5, які одним кінцем шарнірно прикріплені до великих плечей важелів 4, малі плечі яких забезпечені відтискними елементами 6 з можливістю силової взаємодії їх з трубою 8, що транспортується, а інші кінці тяг 5 шарнірно з'єднані з кінцями поперечини 7, яка жорстко прикріплена до повзуна 1 (на фіг. 1 показані елементи механізму відриву, які розташовані лише з одного боку від повзуна 1). При транспортуванні труб із захисним поліетиленовим покриттям нижня частина елементів 6 виконана викривленою з врахуванням діаметра цього покриття, що унеможливлює його пошкодження. Захоплювач має 4 додатковий корпус 9, який, як і основний корпус 3, виконаний формою як частина труби і прикріплений до основного корпусу 3 знизу з можливістю заміни на інший додатковий корпус. На нижній поверхні додаткового корпусу 9 закріплені об'єднані в блоки 10 постійні магніти паралельними рядами у напрямі довжини корпусу 1, причому сусідні блоки 10 в рядах і сусідні блоки 10 в сусідніх рядах мають протилежну полярність (фіг.З). На фіг. 4 приведена картина замикання уявних силових ліній магнітного поля в магнітній системі з трьох магнітних блоків 10, два з яких мають протилежну намагніченість по відношенню до середнього магнітного блока 10, м.р.с. якого послідовно з'єднана з м.р.с. кожного з сусідніх блоків 10. В результаті магнітний потік, що замикається через середній магнітний блок 10, збільшується удвічі. У магнітній системі з чотирьох магнітних блоків 10 магнітний потік в середньому блоці 10 збільшується втричі, в магнітній системі з п'яти магнітних блоків 10 - в чотири рази. Додатковий корпус 9 може бути виконаний таким, що складається з трьох шарнірно з'єднаних між собою частин (фіг.5), середня з яких прикріплена знизу до основного корпусу 3, а дві інші дозволяють змінювати в деякому діапазоні геометрію нижньої поверхні магнітної системи захоплювача при зміні діаметра труб, що транспортуються. Автоматичний магнітний захоплювач працює таким чином. У вихідному стані захоплювач підвішений за допомогою проміжного стропа на гак крана. При цьому повзун 1 займає крайнє верхнє положення, а відтискні елементи 6 - крайнє нижнє положення. У такому стані захоплювач опускають на поверхню труби 8. Першими торкаються труби 8 відтискні елементи 6. При цьому сила магнітного поля, що збільшується у міру зменшення відстані між трубою 8 і магнітною системою додаткового корпусу 9, передається через відтискні елементи 6 на малі плечі важелів 4, а через їх великі плечі, тягу 5, поперечину 7 і повзун 1 викликає натягнення проміжного троса, що дозволяє здійснити плавне опускання основного корпусу 3 і додаткового корпусу 9 на поверхню труби 8 і запобігти ударам магнітної системи захоплювача об поверхню труби 8. Захоплювач опускається на поверхню труби 8, яка захоплюється магнітною системою додаткового корпусу 9, повзун 1 опускається в крайнє нижнє положення і при своєму ході здійснює автоматичну фіксацію важелів 4 від повороту. Захоплювач з трубою 8 піднімають для транспортування до місця розвантаження. При цьому повзун 1 за принципом дії механізму фіксації частково за рахунок невеликого вільного ходу переміщається вгору відносно основи 2 і займає проміжне положення, при якому відтискні елементи 6 не торкаються труби 8. Захоплювач опускають на розвантажувальний майданчик. Повзун 1 переміщається в крайнє нижнє положення і при своєму ході здійснює автоматичне перемикання механізму фіксації важелів 4 від повороту. При наступному підйомі захоплювача повзун 1 при своєму русі в крайнє верхнє положення захоплює за собою тяги 5 і важелі 4, малі плечі яких передають зусилля відриву відтискним елементам 6, які взаємодіють з трубою 8 і відривають захват від її поверхні. Захоплювач переносять до місця завантаження і цикл роботи повторюється. Виконання додаткового корпусу з частинами, шарнірно з'єднаними одна з другою, дозволяє розширити діапазон діаметрів труб, що транспортуються. Запропонований автоматичний магнітний захоплювач має просту конструкцію і дозволяє повністю виключити витрати електроенергії на утримання труб середніх і великих діаметрів при транспортуванні, вантаженню та вивантаженню їх з вагонів, тривалому утриманні труб при зварюванні газопроводів. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 55 60 1. Автоматичний магнітний захоплювач, що містить повзун з механізмом фіксації, який навішаний на гак крана і установлений з можливістю вертикального переміщення в основі, яка прикріплена до основного корпусу, і механізм відриву, що включає розташовані по різні сторони від повзуна і шарнірно з'єднані з верхньою частиною основного корпусу відтискні важелі і тяги, які одним кінцем шарнірно прикріплені до великих плечей важелів, малі плечі яких оснащені відтискними елементами, а інші кінці тяг шарнірно з'єднані з кінцями поперечини, жорстко прикріпленої до повзуна, додатковий корпус і постійні магніти, який відрізняється тим, що 2 UA 74198 U 5 основний і додатковий корпуси виконані у вигляді частини труби великого діаметра, при цьому додатковий корпус прикріплений до основного корпусу знизу, з можливістю заміни на інший, а постійні магніти об'єднані в окремі блоки і закріплені на нижній поверхні додаткового корпусу паралельними рядами, причому сусідні блоки в рядах і сусідні блоки в сусідніх рядах мають протилежну полярність, а відтискні елементи мають Т-подібну форму. 2. Автоматичний магнітний захоплювач за п. 1, який відрізняється тим, що додатковий корпус виконаний принаймні з трьох частин, які шарнірно з'єднані між собою, середня з яких прикріплена до основного корпусу, а інші частини з'єднані з середньою частиною з можливістю вільної зміни положення і фіксації. 3 UA 74198 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюAutomatic magnetized pickup tool
Автори англійськоюSadovoi Oleksandr Valentynovych, Kozlov Mykhailo Ivanovych
Назва патенту російськоюАвтоматический магнитный захват
Автори російськоюСадовой Олександр Валентинович, Козлов Михаил Иванович
МПК / Мітки
МПК: B66C 1/04
Мітки: магнітний, автоматичний, захоплювач
Код посилання
<a href="https://ua.patents.su/6-74198-avtomatichnijj-magnitnijj-zakhoplyuvach.html" target="_blank" rel="follow" title="База патентів України">Автоматичний магнітний захоплювач</a>
Автоматичний магнітний захоплювач
Номер патенту: 65032
Опубліковано: 25.11.2011
Автори: Козлов Михайло Іванович, Садовой Олександр Валентинович
МПК: B66C 1/04
Мітки: захоплювач, автоматичний, магнітний
Формула / Реферат:
Автоматичний магнітний захоплювач, який містить повзун чотиритактного механізму фіксації, що навішаний на гак крана і установлений з можливістю вертикального переміщення в основі, яка прикріплена до основного корпусу з розміщеними в ньому постійними магнітами, і механізм відриву, що включає розташовані по різні сторони від повзуна й шарнірно з'єднані з верхньою частиною основного корпусу віджимні важелі, малі плечі яких обладнані роликами, а...
Автоматичний магнітний захоплювач
Номер патенту: 70961
Опубліковано: 25.06.2012
Автори: Садовой Олександр Валентинович, Козлов Михайло Іванович
МПК: B66C 1/04
Мітки: захоплювач, автоматичний, магнітний
Формула / Реферат:
Автоматичний магнітний захоплювач, що містить повзун чотиритактного механізму фіксації, що навішаний на гак крана і установлений з можливістю вертикального переміщення в основі, яка прикріплена до основного корпусу з розміщеними в ньому постійними магнітами, і механізм відриву, що включає розташовані по різні сторони від повзуна і шарнірно з'єднані з верхньою частиною основного корпусу віджимні важелі, малі плечі яких обладнані віджимними...
Магнітний захоплювач
Номер патенту: 65031
Опубліковано: 25.11.2011
Автори: Садовой Олександр Валентинович, Козлов Михайло Іванович
МПК: B66C 1/04
Мітки: захоплювач, магнітний
Формула / Реферат:
Магнітний захоплювач, що містить повзун з механізмом фіксації, який навішаний на гак крана і установлений з можливістю вертикального переміщення в основі, яка прикріплена до основного корпусу з розміщеними в ньому постійними магнітами, і механізм відриву, що включає розташовані по різні сторони від повзуна й шарнірно з'єднані з верхньою частиною основного корпусу віджимні важелі, малі плечі яких обладнані роликами, а більші плечі кінематично...
Автоматичний магнітний захоплювач
Номер патенту: 1836
Опубліковано: 20.12.1994
Автори: Гордієнко Микола Іванович, Козлов Михайло Іванович, Гершенкрой Володимир Леонідович
МПК: B66C 1/00
Мітки: автоматичний, захоплювач, магнітний
Формула / Реферат:
Автоматический магнитный захват, содержащий навешиваемый на крюк крана посредством серьги ползун четырехтактного механизма фиксации, корпус с размещенными в нем постоянными магнитами и механизм отрыва, включающий шарнирно закрепленные на противоположных сторонах корпуса отжимные элементы, кинематически соединенные с ползуном четырехтактного механизма фиксации, отличающийся тем, что, с целью повышения эксплуатационных качеств, отжимные...
Автоматичний протиугінний рейковий захоплювач
Номер патенту: 5136
Опубліковано: 15.02.2005
Автор: Сорока Георгій Митрофанович
МПК: B66C 9/00
Мітки: протиугінний, захоплювач, автоматичний, рейковий
Формула / Реферат:
1. Автоматичний протиугінний рейковий захоплювач, розміщений на металоконструкції крана, що містить кліщовий пристрій, виконаний у вигляді шарнірно закріплених на візку важелів, які взаємодіють з головкою рейки, і оснащений розпірним пристосуванням, що являє собою клиновий тягар, зв'язаний з механізмом його підйому, що має редуктор, електродвигун, регулятор швидкості і пристрій ручного підйому клинового тягаря, який відрізняється тим, що...
Попередній патент: Спосіб оцінки ефективності лікування аранідипіном хворих на ішемічну хворобу серця з стенокардією та артеріальною гіпертензією
Наступний патент: Механізм для відрізання силосу та сінажу
Випадковий патент: Спосіб кислотної обробки привибійної зони пласта