Багатопозиційний пневмоелектричний привод
Номер патенту: 73494
Опубліковано: 25.09.2012
Автори: Новік Микола Андрійович, Дідовець Вячеслав Євгенійович
Формула / Реферат
Багатопозиційний пневмоелектричний привод, що містить циліндр, в якому з утворенням поршневої і штокової порожнин розміщений поршень з вихідним штоком і додатковий поршень зі штоком, кінематично сполученим з валом електричного крокового двигуна, та гідравлічні об'ємні дозатори, який відрізняється тим, що додатковий поршень зі штоком з утворенням гідравлічної та компенсуючої порожнин розміщений з можливістю поступального руху в одному із циліндрів гідравлічного дозатора.
Текст
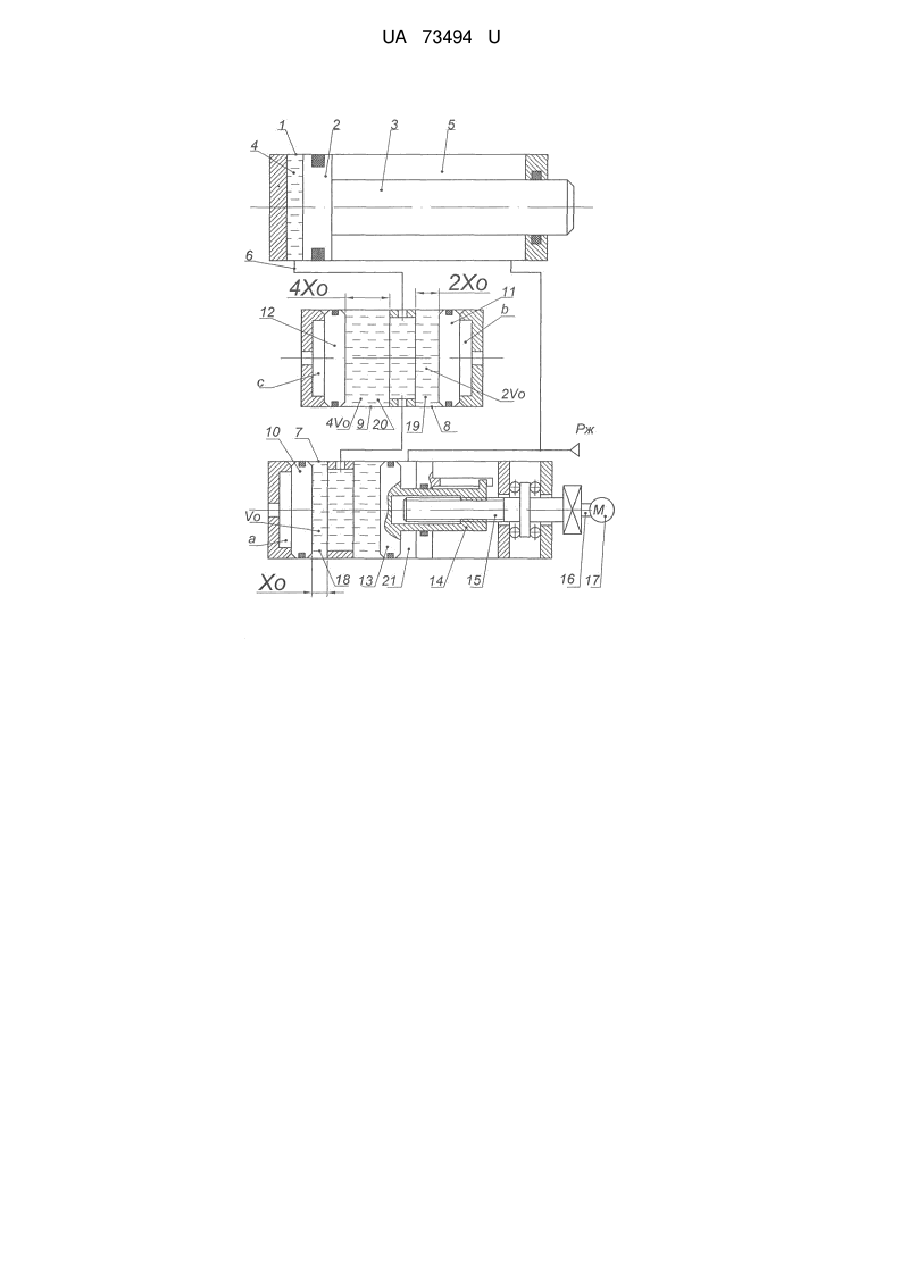
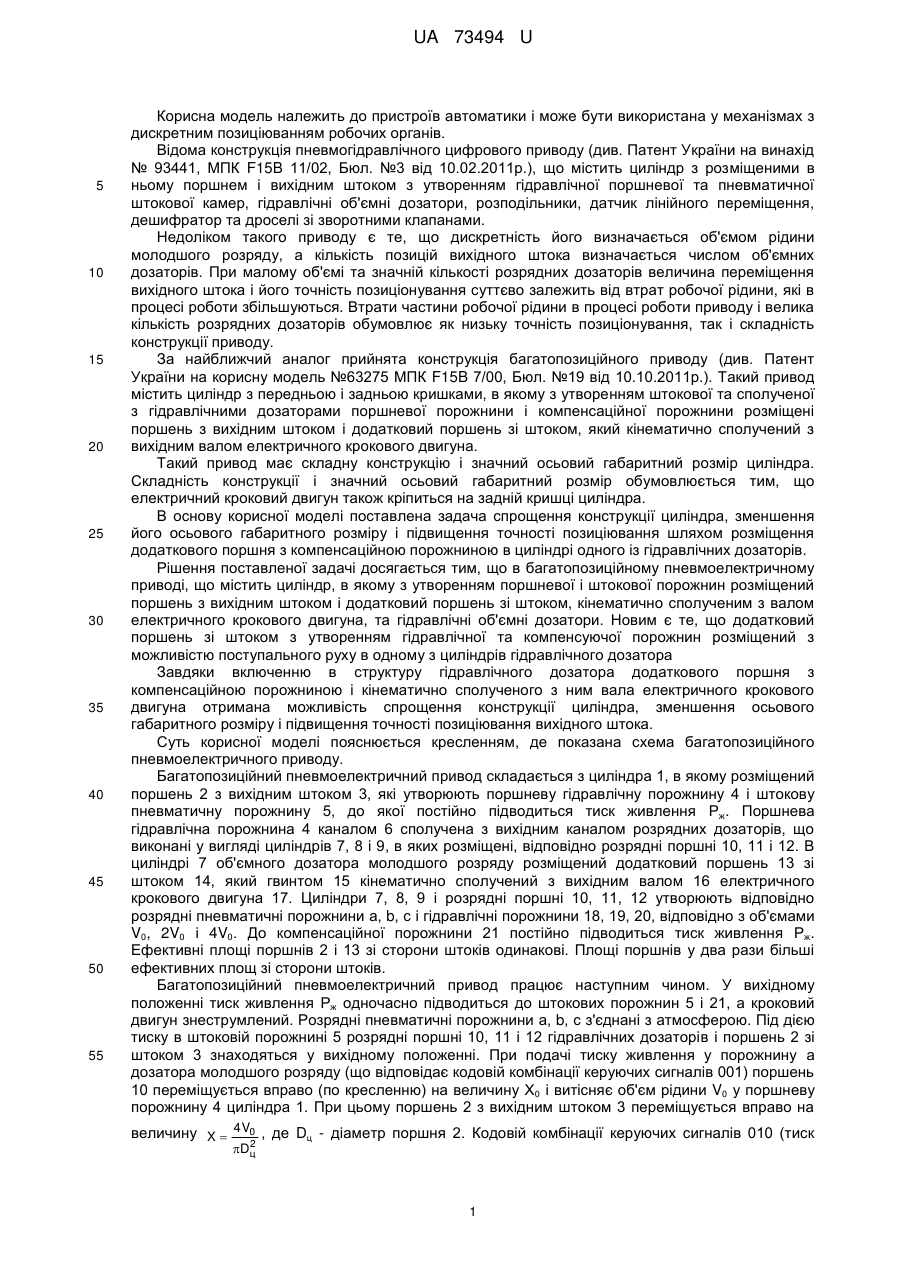
Реферат: UA 73494 U UA 73494 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до пристроїв автоматики і може бути використана у механізмах з дискретним позиціюванням робочих органів. Відома конструкція пневмогідравлічного цифрового приводу (див. Патент України на винахід № 93441, МПК F15B 11/02, Бюл. №3 від 10.02.2011р.), що містить циліндр з розміщеними в ньому поршнем і вихідним штоком з утворенням гідравлічної поршневої та пневматичної штокової камер, гідравлічні об'ємні дозатори, розподільники, датчик лінійного переміщення, дешифратор та дроселі зі зворотними клапанами. Недоліком такого приводу є те, що дискретність його визначається об'ємом рідини молодшого розряду, а кількість позицій вихідного штока визначається числом об'ємних дозаторів. При малому об'ємі та значній кількості розрядних дозаторів величина переміщення вихідного штока і його точність позиціонування суттєво залежить від втрат робочої рідини, які в процесі роботи збільшуються. Втрати частини робочої рідини в процесі роботи приводу і велика кількість розрядних дозаторів обумовлює як низьку точність позиціонування, так і складність конструкції приводу. За найближчий аналог прийнята конструкція багатопозиційного приводу (див. Патент України на корисну модель №63275 МПК F15B 7/00, Бюл. №19 від 10.10.2011р.). Такий привод містить циліндр з передньою і задньою кришками, в якому з утворенням штокової та сполученої з гідравлічними дозаторами поршневої порожнини і компенсаційної порожнини розміщені поршень з вихідним штоком і додатковий поршень зі штоком, який кінематично сполучений з вихідним валом електричного крокового двигуна. Такий привод має складну конструкцію і значний осьовий габаритний розмір циліндра. Складність конструкції і значний осьовий габаритний розмір обумовлюється тим, що електричний кроковий двигун також кріпиться на задній кришці циліндра. В основу корисної моделі поставлена задача спрощення конструкції циліндра, зменшення його осьового габаритного розміру і підвищення точності позиціювання шляхом розміщення додаткового поршня з компенсаційною порожниною в циліндрі одного із гідравлічних дозаторів. Рішення поставленої задачі досягається тим, що в багатопозиційному пневмоелектричному приводі, що містить циліндр, в якому з утворенням поршневої і штокової порожнин розміщений поршень з вихідним штоком і додатковий поршень зі штоком, кінематично сполученим з валом електричного крокового двигуна, та гідравлічні об'ємні дозатори. Новим є те, що додатковий поршень зі штоком з утворенням гідравлічної та компенсуючої порожнин розміщений з можливістю поступального руху в одному з циліндрів гідравлічного дозатора Завдяки включенню в структуру гідравлічного дозатора додаткового поршня з компенсаційною порожниною і кінематично сполученого з ним вала електричного крокового двигуна отримана можливість спрощення конструкції циліндра, зменшення осьового габаритного розміру і підвищення точності позиціювання вихідного штока. Суть корисної моделі пояснюється кресленням, де показана схема багатопозиційного пневмоелектричного приводу. Багатопозиційний пневмоелектричний привод складається з циліндра 1, в якому розміщений поршень 2 з вихідним штоком 3, які утворюють поршневу гідравлічну порожнину 4 і штокову пневматичну порожнину 5, до якої постійно підводиться тиск живлення Рж. Поршнева гідравлічна порожнина 4 каналом 6 сполучена з вихідним каналом розрядних дозаторів, що виконані у вигляді циліндрів 7, 8 і 9, в яких розміщені, відповідно розрядні поршні 10, 11 і 12. В циліндрі 7 об'ємного дозатора молодшого розряду розміщений додатковий поршень 13 зі штоком 14, який гвинтом 15 кінематично сполучений з вихідним валом 16 електричного крокового двигуна 17. Циліндри 7, 8, 9 і розрядні поршні 10, 11, 12 утворюють відповідно розрядні пневматичні порожнини а, b, с і гідравлічні порожнини 18, 19, 20, відповідно з об'ємами V0, 2V0 і 4V0. До компенсаційної порожнини 21 постійно підводиться тиск живлення Рж. Ефективні площі поршнів 2 і 13 зі сторони штоків одинакові. Площі поршнів у два рази більші ефективних площ зі сторони штоків. Багатопозиційний пневмоелектричний привод працює наступним чином. У вихідному положенні тиск живлення Рж одночасно підводиться до штокових порожнин 5 і 21, а кроковий двигун знеструмлений. Розрядні пневматичні порожнини а, b, с з'єднані з атмосферою. Під дією тиску в штоковій порожнині 5 розрядні поршні 10, 11 і 12 гідравлічних дозаторів і поршень 2 зі штоком 3 знаходяться у вихідному положенні. При подачі тиску живлення у порожнину а дозатора молодшого розряду (що відповідає кодовій комбінації керуючих сигналів 001) поршень 10 переміщується вправо (по кресленню) на величину Х0 і витісняє об'єм рідини V0 у поршневу порожнину 4 циліндра 1. При цьому поршень 2 з вихідним штоком 3 переміщується вправо на величину X 4V0 , де Dц - діаметр поршня 2. Кодовій комбінації керуючих сигналів 010 (тиск 2 Dц 1 UA 73494 U живлення подається тільки у порожнину b) відповідає переміщення вихідного штока 3 на величину X 4V0 . Кодовій комбінації 011 (тиск живлення подається одночасно у порожнини а і 2 Dц b) відповідає переміщення вихідного штока 3 на величину 3 X 12V0 2 і т.д. Максимальна D ц . 5 10 n величина переміщення вихідного штока визначається залежністю Хmах=X (2 -1), де n - число розрядів (гідравлічних дозаторів). Кількість позицій вихідного штока визначається по залежності n N=2 . При одночасному опрацюванні кодових комбінацій керуючих сигналів і керуючих імпульсів, що подаються на електричний кроковий двигун 17, величина переміщення вихідного штока визначається по залежності l X0 Dg Dц in i1 360 2 i1 n iм t 2 D2 g 2 Dц , де - дискретність електричного крокового двигуна; nім - число опрацьованих кроковим двигуном імпульсів; t2 - крок гвинта 15; і - порядковий номер розрядного дозатора; Dg - діаметр поршня дозатора. При Dg=Dц величина переміщення вихідного штока 3 визначається по залежності in i1 15 360 l X 0 2i1 niм t 2 , Дискретність такого приводу l t 2 , . 360 При = 1,8° і t2=2мм, l 1,8 360 2 0,01 мм). ( Максимальна величина переміщення вихідного штока 3, нехтуючи втратами рідини lmax X 0 (2n 1) 20 18 , 360 3600 2 516(мм). В процесі роботи привода можливі втрати рідини із робочих порожнин, які можна компенсувати опрацюванням додаткових імпульсів електричним кроковим двигуном. Так, наприклад, якщо похибка вихідного штока 3 складає Іn=0,5 мм, для її компенсації необхідно електричним кроковим двигуном додатково опрацювати niм.д 30 n iм t 2 . Так при Х0=32 мм; n=4; = 1,8°; t2=2мм; nім = 3600 імпульсів l 32(2 4 1) 25 360 ln 360 0,5 360 50 (імпульсів ). t 18 2 , Таким чином запропонований привод при малій дискретності і значному переміщенні вихідного штока має незначний осьовий габаритний розмір циліндра 1, його довжина визначається тільки величиною переміщення вихідного штока. Крім того в процесі роботи привода можлива компенсація втраченої рідини і таким чином забезпечувати високу точність позиціювання вихідного штока. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 Багатопозиційний пневмоелектричний привод, що містить циліндр, в якому з утворенням поршневої і штокової порожнин розміщений поршень з вихідним штоком і додатковий поршень зі штоком, кінематично сполученим з валом електричного крокового двигуна, та гідравлічні об'ємні дозатори, який відрізняється тим, що додатковий поршень зі штоком з утворенням гідравлічної та компенсуючої порожнин розміщений з можливістю поступального руху в одному із циліндрів гідравлічного дозатора. 2 UA 73494 U Комп’ютерна верстка Л.Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMulti-position pneumautic-electric drive
Автори англійськоюNovik Mykola Andriiovych, Didovets Viacheslav Yevheniiovych
Назва патенту російськоюМногопозиционный пневмоэлектрический привод
Автори російськоюНовик Николай Андреевич, Дидовец Вячеслав Евгеньевич
МПК / Мітки
МПК: F15B 11/02
Мітки: багатопозиційний, пневмоелектричний, привод
Код посилання
<a href="https://ua.patents.su/5-73494-bagatopozicijjnijj-pnevmoelektrichnijj-privod.html" target="_blank" rel="follow" title="База патентів України">Багатопозиційний пневмоелектричний привод</a>
Багатопозиційний привод
Номер патенту: 63275
Опубліковано: 10.10.2011
Автори: Дідовець Вячеслав Євгенійович, Новік Микола Андрійович
МПК: F15B 7/00
Мітки: багатопозиційний, привод
Формула / Реферат:
Багатопозиційний привод, що містить циліндр з передньою і задньою кришками, в якому з утворенням штокової та сполученої з гідравлічними порожнинами дозаторів міжпоршневої порожнини і компенсаційної порожнини розміщені поршень з вихідним штоком і додатковий поршень зі штоком, який через осьовий циліндричний отвір, виконаний у задній кришці, виходить за її межі і кінематично з'єднаний з вихідним валом крокового двигуна, який відрізняється тим,...
Багатопозиційний привод
Номер патенту: 90383
Опубліковано: 26.04.2010
Автори: Кучерук Юрій Миколайович, Дорогань Володимир Васильович, Новік Микола Андрійович
МПК: F15B 7/00
Мітки: багатопозиційний, привод
Формула / Реферат:
1. Багатопозиційний привод, який містить циліндр з вихідним штоком, передню і задню кришки, в якому послідовно розміщено поршні з обмежувачами відносного переміщення, що утворюють розрядні порожнини і порожнину зворотного руху поршнів з каналами живлення, який відрізняється тим, що поршень молодшого розряду жорстко з'єднаний з додатковим штоком, який через отвір, виконаний у задній кришці, виходить за її межі і кінематично з'єднаний з...
Багатопозиційний пневмогідравлічний привод
Номер патенту: 27812
Опубліковано: 12.11.2007
Автор: Новік Микола Андрійович
МПК: F15B 7/00
Мітки: пневмогідравлічний, привод, багатопозиційний
Формула / Реферат:
1. Багатопозиційний пневмогідравлічний привод, що містить циліндр з розміщеними в ньому поршнем і штоком з утворенням гідравлічної поршневої та пневматичної штокової камер з каналами живлення, гідравлічні розрядні дозатори з гідравлічними і пневматичними камерами, утвореними їх поршнями, який відрізняється тим, що привод додатково містить двопозиційні дволінійні розподільники, вхідні канали яких з'єднані з гідравлічними дозаторами, а вихідні...
Цифровий привод поворотно-поступальної дії
Номер патенту: 66811
Опубліковано: 25.01.2012
Автори: Пузик Євген Олегович, Дідовець Вячеслав Євгенійович, Новік Микола Андрійович
МПК: F15B 9/03
Мітки: дії, поворотно-поступальної, привод, цифровий
Формула / Реферат:
Цифровий привод поворотно-поступальної дії, що містить циліндр з вихідним штоком з передньою і задньою кришками, в якому послідовно з утворенням розрядних порожнин з каналами живлення розміщені розрядні поршні з обмежувачами відносного переміщення і встановлений на задній кришці кроковий двигун, який відрізняється тим, що в осьових розточках задньої кришки і поршнів молодших розрядів герметично розміщений з можливістю повороту додатковий...
Багатопозиційний привід
Номер патенту: 63780
Опубліковано: 25.10.2011
Автори: Новік Микола Андрійович, Дідовець Вячеслав Євгенійович
МПК: F15B 7/00
Мітки: багатопозиційний, привід
Формула / Реферат:
Багатопозиційний привід, що містить циліндр з вихідним штоком, в якому послідовно з утворенням розрядних, додаткової компенсуючої і штокової порожнин з каналами живлення розміщені розрядні поршні з обмежувачами відносного переміщення, виконаними у вигляді концентрично розміщених хвостовиків з гальмуючими поршнями і кроковий двигун, вихідний вал якого кінематично сполучений зі штоком поршня молодшого розряду, який відрізняється тим, що в...
Попередній патент: Установка для лазерної обробки
Наступний патент: Модуль лінійного переміщення
Випадковий патент: Спосіб виготовлення гіпсових плит