Безконтактний вимірювач крутного моменту і механічної потужності
Номер патенту: 101926
Опубліковано: 12.10.2015
Автори: Семенець Марина Дмитрівна, Шевченко Микола Якович, Семенець Дмитро Анатолійович

Формула / Реферат
Безконтактний вимірювач крутного моменту і механічної потужності, що складається з першого та другого датчиків положення, встановлених відповідно на двох дископодібних корпусах приводного та веденого валів, з'єднаних пружною вставкою, та перетворювального пристрою, який відрізняється тим, що в вимірювач додатково введений тахометричний датчик, всі датчики виконані оптичними з спільним випромінювачем, вихід першого датчика положення приводного валу з'єднаний з першим входом першого елемента кон'юнкції, на другий вхід якого підключений вихід інвертора, вхід якого з'єднаний з виходом другого датчика положення веденого валу, вихід першого елемента кон'юнкції з'єднаний з першим входом другого елемента кон'юнкції, другий вхід якого з'єднаний з виходом тахометричного датчика.
Текст
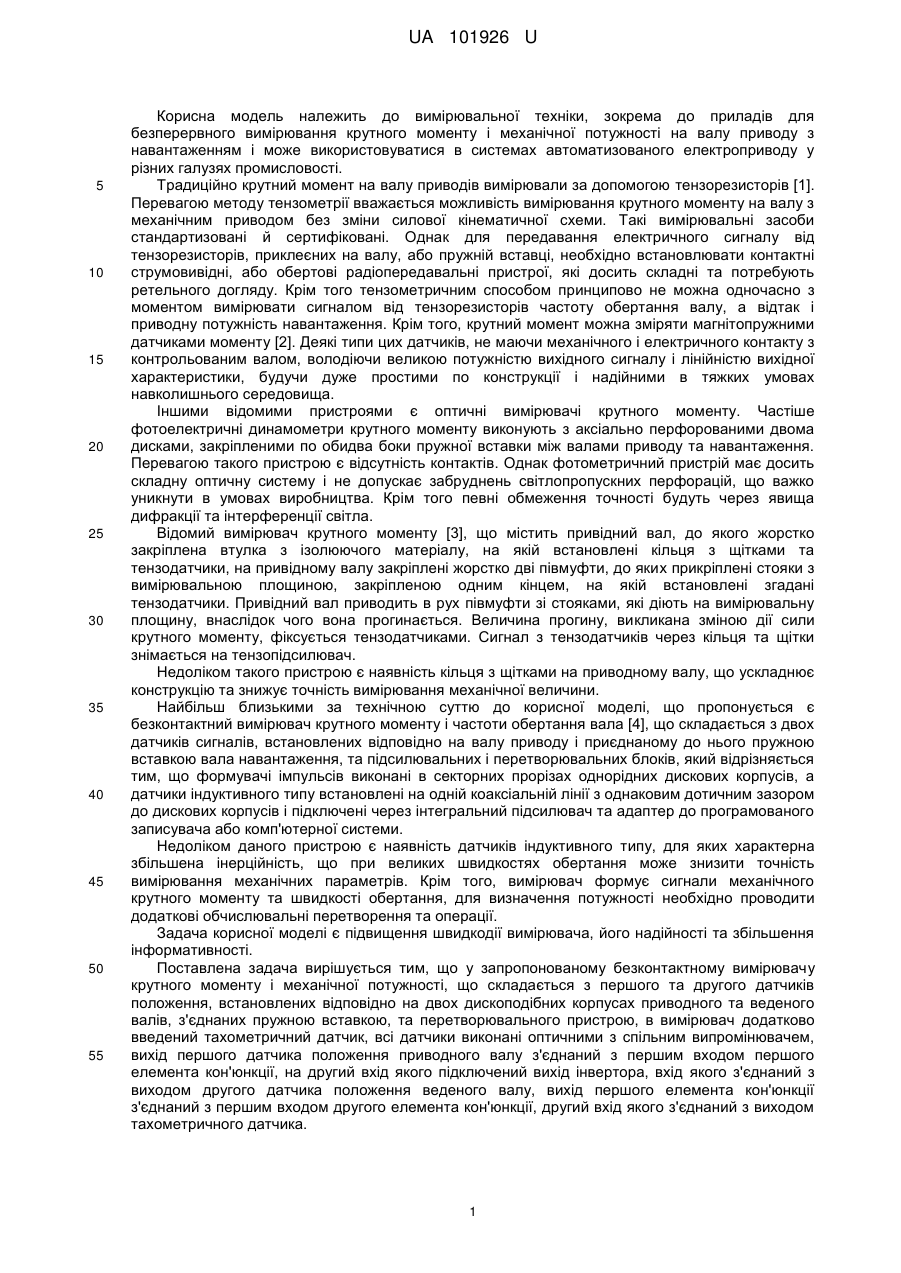
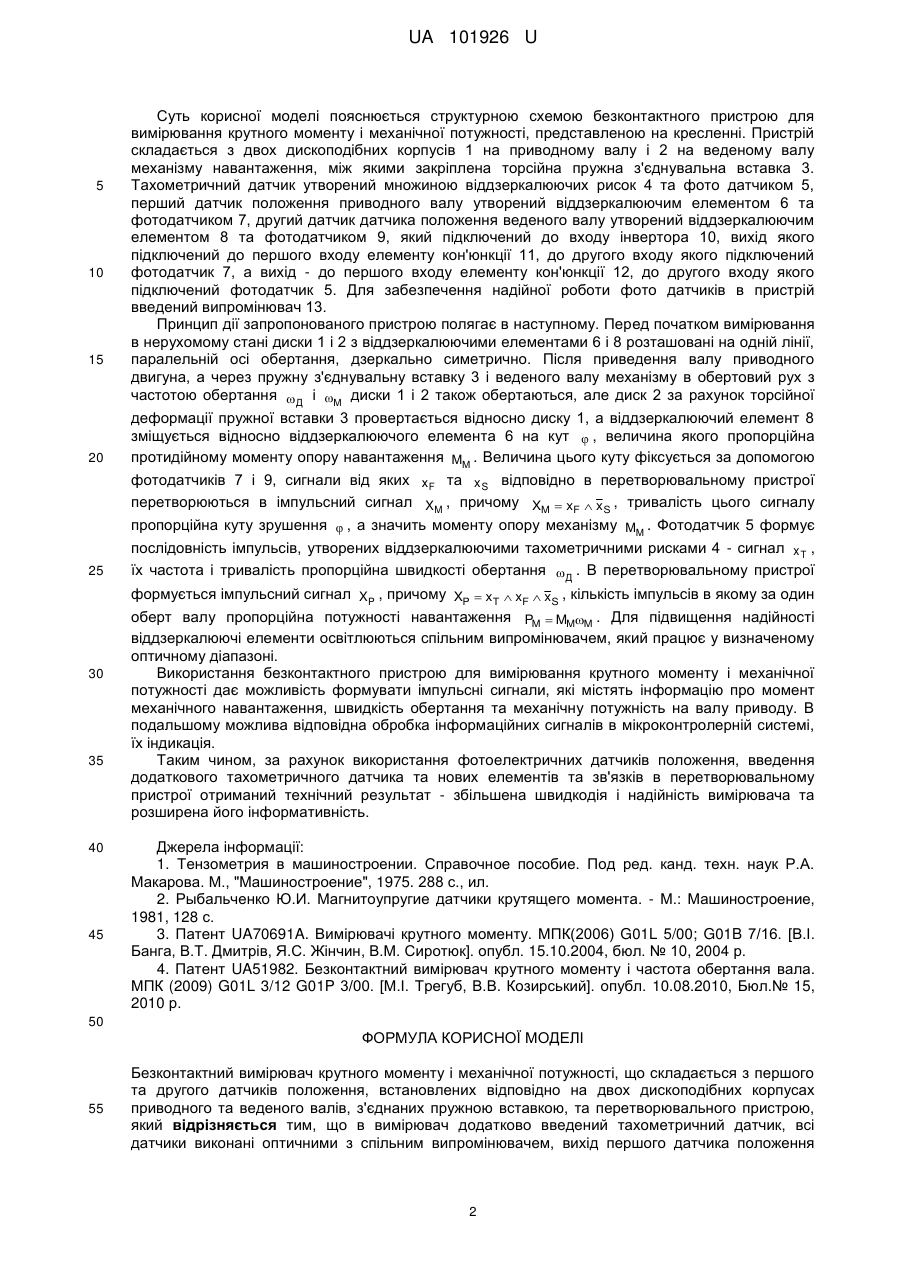
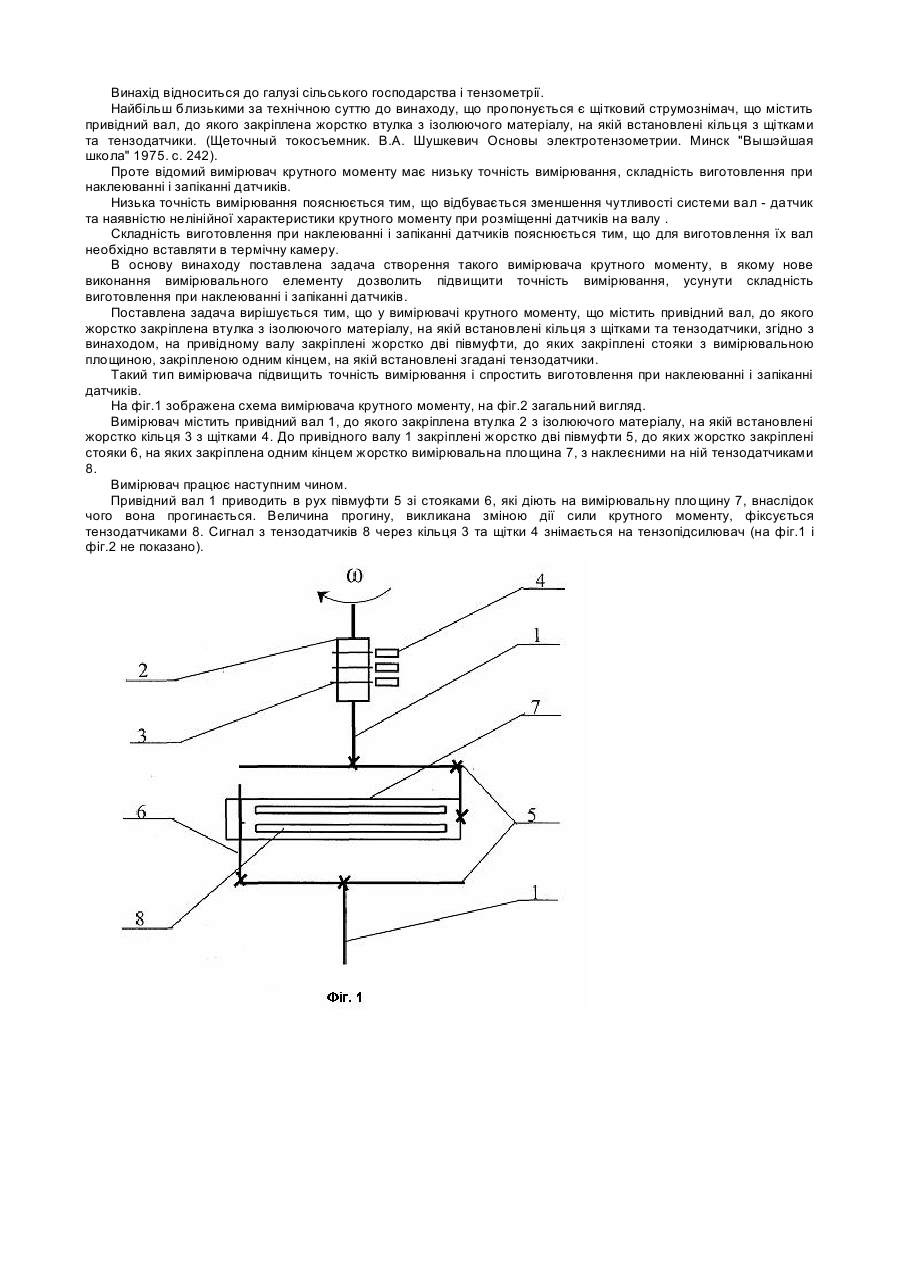
Реферат: Безконтактний вимірювач крутного моменту і механічної потужності складається з першого та другого датчиків положення, встановлених відповідно на двох дископодібних корпусах приводного та веденого валів, з'єднаних пружною вставкою, та перетворювального пристрою. У вимірювач додатково введений тахометричний датчик. Всі датчики виконані оптичними з спільним випромінювачем. UA 101926 U (12) UA 101926 U UA 101926 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до вимірювальної техніки, зокрема до приладів для безперервного вимірювання крутного моменту і механічної потужності на валу приводу з навантаженням і може використовуватися в системах автоматизованого електроприводу у різних галузях промисловості. Традиційно крутний момент на валу приводів вимірювали за допомогою тензорезисторів [1]. Перевагою методу тензометрії вважається можливість вимірювання крутного моменту на валу з механічним приводом без зміни силової кінематичної схеми. Такі вимірювальні засоби стандартизовані й сертифіковані. Однак для передавання електричного сигналу від тензорезисторів, приклеєних на валу, або пружній вставці, необхідно встановлювати контактні струмовивідні, або обертові радіопередавальні пристрої, які досить складні та потребують ретельного догляду. Крім того тензометричним способом принципово не можна одночасно з моментом вимірювати сигналом від тензорезисторів частоту обертання валу, а відтак і приводну потужність навантаження. Крім того, крутний момент можна зміряти магнітопружними датчиками моменту [2]. Деякі типи цих датчиків, не маючи механічного і електричного контакту з контрольованим валом, володіючи великою потужністю вихідного сигналу і лінійністю вихідної характеристики, будучи дуже простими по конструкції і надійними в тяжких умовах навколишнього середовища. Іншими відомими пристроями є оптичні вимірювачі крутного моменту. Частіше фотоелектричні динамометри крутного моменту виконують з аксіально перфорованими двома дисками, закріпленими по обидва боки пружної вставки між валами приводу та навантаження. Перевагою такого пристрою є відсутність контактів. Однак фотометричний пристрій має досить складну оптичну систему і не допускає забруднень світлопропускних перфорацій, що важко уникнути в умовах виробництва. Крім того певні обмеження точності будуть через явища дифракції та інтерференції світла. Відомий вимірювач крутного моменту [3], що містить привідний вал, до якого жорстко закріплена втулка з ізолюючого матеріалу, на якій встановлені кільця з щітками та тензодатчики, на привідному валу закріплені жорстко дві півмуфти, до яких прикріплені стояки з вимірювальною площиною, закріпленою одним кінцем, на якій встановлені згадані тензодатчики. Привідний вал приводить в рух півмуфти зі стояками, які діють на вимірювальну площину, внаслідок чого вона прогинається. Величина прогину, викликана зміною дії сили крутного моменту, фіксується тензодатчиками. Сигнал з тензодатчиків через кільця та щітки знімається на тензопідсилювач. Недоліком такого пристрою є наявність кільця з щітками на приводному валу, що ускладнює конструкцію та знижує точність вимірювання механічної величини. Найбільш близькими за технічною суттю до корисної моделі, що пропонується є безконтактний вимірювач крутного моменту і частоти обертання вала [4], що складається з двох датчиків сигналів, встановлених відповідно на валу приводу і приєднаному до нього пружною вставкою вала навантаження, та підсилювальних і перетворювальних блоків, який відрізняється тим, що формувачі імпульсів виконані в секторних прорізах однорідних дискових корпусів, а датчики індуктивного типу встановлені на одній коаксіальній лінії з однаковим дотичним зазором до дискових корпусів і підключені через інтегральний підсилювач та адаптер до програмованого записувача або комп'ютерної системи. Недоліком даного пристрою є наявність датчиків індуктивного типу, для яких характерна збільшена інерційність, що при великих швидкостях обертання може знизити точність вимірювання механічних параметрів. Крім того, вимірювач формує сигнали механічного крутного моменту та швидкості обертання, для визначення потужності необхідно проводити додаткові обчислювальні перетворення та операції. Задача корисної моделі є підвищення швидкодії вимірювача, його надійності та збільшення інформативності. Поставлена задача вирішується тим, що у запропонованому безконтактному вимірювачу крутного моменту і механічної потужності, що складається з першого та другого датчиків положення, встановлених відповідно на двох дископодібних корпусах приводного та веденого валів, з'єднаних пружною вставкою, та перетворювального пристрою, в вимірювач додатково введений тахометричний датчик, всі датчики виконані оптичними з спільним випромінювачем, вихід першого датчика положення приводного валу з'єднаний з першим входом першого елемента кон'юнкції, на другий вхід якого підключений вихід інвертора, вхід якого з'єднаний з виходом другого датчика положення веденого валу, вихід першого елемента кон'юнкції з'єднаний з першим входом другого елемента кон'юнкції, другий вхід якого з'єднаний з виходом тахометричного датчика. 1 UA 101926 U 5 10 15 20 Суть корисної моделі пояснюється структурною схемою безконтактного пристрою для вимірювання крутного моменту і механічної потужності, представленою на кресленні. Пристрій складається з двох дископодібних корпусів 1 на приводному валу і 2 на веденому валу механізму навантаження, між якими закріплена торсійна пружна з'єднувальна вставка 3. Тахометричний датчик утворений множиною віддзеркалюючих рисок 4 та фото датчиком 5, перший датчик положення приводного валу утворений віддзеркалюючим елементом 6 та фотодатчиком 7, другий датчик датчика положення веденого валу утворений віддзеркалюючим елементом 8 та фотодатчиком 9, який підключений до входу інвертора 10, вихід якого підключений до першого входу елементу кон'юнкції 11, до другого входу якого підключений фотодатчик 7, а вихід - до першого входу елементу кон'юнкції 12, до другого входу якого підключений фотодатчик 5. Для забезпечення надійної роботи фото датчиків в пристрій введений випромінювач 13. Принцип дії запропонованого пристрою полягає в наступному. Перед початком вимірювання в нерухомому стані диски 1 і 2 з віддзеркалюючими елементами 6 і 8 розташовані на одній лінії, паралельній осі обертання, дзеркально симетрично. Після приведення валу приводного двигуна, а через пружну з'єднувальну вставку 3 і веденого валу механізму в обертовий рух з частотою обертання Д і М диски 1 і 2 також обертаються, але диск 2 за рахунок торсійної деформації пружної вставки 3 провертається відносно диску 1, а віддзеркалюючий елемент 8 зміщується відносно віддзеркалюючого елемента 6 на кут , величина якого пропорційна протидійному моменту опору навантаження ММ . Величина цього куту фіксується за допомогою фотодатчиків 7 і 9, сигнали від яких х F та x S відповідно в перетворювальному пристрої перетворюються в імпульсний сигнал XM , причому XM xF xS , тривалість цього сигналу 25 30 35 40 45 пропорційна куту зрушення , а значить моменту опору механізму ММ . Фотодатчик 5 формує послідовність імпульсів, утворених віддзеркалюючими тахометричними рисками 4 - сигнал x T , їх частота і тривалість пропорційна швидкості обертання Д . В перетворювальному пристрої формується імпульсний сигнал XP , причому XP xT xF xS , кількість імпульсів в якому за один оберт валу пропорційна потужності навантаження PM MMM . Для підвищення надійності віддзеркалюючі елементи освітлюються спільним випромінювачем, який працює у визначеному оптичному діапазоні. Використання безконтактного пристрою для вимірювання крутного моменту і механічної потужності дає можливість формувати імпульсні сигнали, які містять інформацію про момент механічного навантаження, швидкість обертання та механічну потужність на валу приводу. В подальшому можлива відповідна обробка інформаційних сигналів в мікроконтролерній системі, їх індикація. Таким чином, за рахунок використання фотоелектричних датчиків положення, введення додаткового тахометричного датчика та нових елементів та зв'язків в перетворювальному пристрої отриманий технічний результат - збільшена швидкодія і надійність вимірювача та розширена його інформативність. Джерела інформації: 1. Тензометрия в машиностроении. Справочное пособие. Под ред. канд. техн. наук Р.А. Макарова. М., "Машиностроение", 1975. 288 с., ил. 2. Рыбальченко Ю.И. Магнитоупругие датчики крутящего момента. - М.: Машиностроение, 1981, 128 с. 3. Патент UA70691A. Вимірювачі крутного моменту. МПК(2006) G01L 5/00; G01B 7/16. [В.І. Банга, В.Т. Дмитрів, Я.С. Жінчин, В.М. Сиротюк]. опубл. 15.10.2004, бюл. № 10, 2004 р. 4. Патент UA51982. Безконтактний вимірювач крутного моменту і частота обертання вала. МПК (2009) G01L 3/12 G01P 3/00. [М.І. Трегуб, В.В. Козирський]. опубл. 10.08.2010, Бюл.№ 15, 2010 р. 50 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 55 Безконтактний вимірювач крутного моменту і механічної потужності, що складається з першого та другого датчиків положення, встановлених відповідно на двох дископодібних корпусах приводного та веденого валів, з'єднаних пружною вставкою, та перетворювального пристрою, який відрізняється тим, що в вимірювач додатково введений тахометричний датчик, всі датчики виконані оптичними з спільним випромінювачем, вихід першого датчика положення 2 UA 101926 U приводного валу з'єднаний з першим входом першого елемента кон'юнкції, на другий вхід якого підключений вихід інвертора, вхід якого з'єднаний з виходом другого датчика положення веденого валу, вихід першого елемента кон'юнкції з'єднаний з першим входом другого елемента кон'юнкції, другий вхід якого з'єднаний з виходом тахометричного датчика. Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01L 5/24, G01L 5/26, G01B 7/16
Мітки: моменту, механічної, вимірювач, безконтактний, потужності, крутного
Код посилання
<a href="https://ua.patents.su/5-101926-bezkontaktnijj-vimiryuvach-krutnogo-momentu-i-mekhanichno-potuzhnosti.html" target="_blank" rel="follow" title="База патентів України">Безконтактний вимірювач крутного моменту і механічної потужності</a>
Безконтактний вимірювач крутного моменту і частоти обертання вала
Номер патенту: 51982
Опубліковано: 10.08.2010
Автори: Козирський Володимир Вікторович, Трегуб Микола Іларіонович
Мітки: вала, крутного, моменту, безконтактний, вимірювач, частоти, обертання
Формула / Реферат:
Безконтактний вимірювач крутного моменту і частоти обертання вала, що складається з двох датчиків сигналів, встановлених відповідно на валу приводу і приєднаному до нього пружною вставкою вала навантаження, та підсилювальних і перетворювальних блоків, який відрізняється тим, що формувачі імпульсів виконані в секторних прорізах однорідних дискових корпусів, а датчики ємнісного або індуктивного типу встановлені на одній коаксіальній лінії з...
Цифровий вимірювач крутного моменту і потужності газотурбінного двигуна
Номер патенту: 29064
Опубліковано: 16.10.2000
Автори: Гапєєв Володимир Опанасович, Лященко Валентин Григорович, Зубенін Сергій Дмитрович, Савічев Серафім Павлович
МПК: G01L 3/00
Мітки: потужності, двигуна, крутного, цифровий, газотурбінного, вимірювач, моменту
Формула / Реферат:
Цифровий вимірювач крутного моменту і потужності газотурбінного двигуна, що містить вал з пружним відрізком, на кінцях якого розміщені дві шестерні з зубцями, що діють на імпульсні датчики, підключені через узгоджуючи пристрої лічильного входу тригepa і першої схеми збіжності, вихід якої підключений на роздільний вхід тригера, а вихід тригера підключений на другий вхід другої схеми збіжності, на перший вхід якої підключений вихід генератора...
Пристрій для вимірювання кутової швидкості, крутного моменту та механічної потужності
Номер патенту: 83475
Опубліковано: 25.07.2008
Автор: Грабар Іван Григорович
МПК: G01R 21/133, G01P 3/64, G01L 3/04
Мітки: потужності, кутової, швидкості, вимірювання, пристрій, моменту, крутного, механічної
Формула / Реферат:
Пристрій для вимірювання кутової швидкості, крутного моменту та механічної потужності, що містить вхідний вал (1), механічно з'єднаний з вихідним валом (2) за допомогою динамометра (3) крутного моменту, обчислювальний пристрій (11), який відрізняється тим, що динамометр (3) крутного моменту складений з двох півмуфт (4, 5), з'єднаних між собою пружним елементом (6) з жорсткістю С, причому на кожній з півмуфт (4, 5) по колу заданого діаметра з...
Вимірювач крутного моменту
Номер патенту: 70691
Опубліковано: 15.10.2004
Автори: Сиротюк Валерій Миколайович, Дмитрів Василь Тарасович, Жінчин Ярослав Семенович, Банга Василь Іванович
Мітки: моменту, крутного, вимірювач
Формула / Реферат:
Вимірювач крутного моменту, що містить привідний вал, до якого жорстко закріплена втулка з ізолюючого матеріалу, на якій встановлені кільця з щітками та тензодатчики, який відрізняється тим, що на привідному валу закріплені жорстко дві півмуфти, до яких прикріплені стояки з вимірювальною площиною, закріпленою одним кінцем, на якій встановлені згадані тензодатчики.
Вимірювач крутного моменту
Номер патенту: 30371
Опубліковано: 25.02.2008
Автори: Венгер Микола Анатолійович, Майсус Василь Володимирович, Волинкін Микола Петрович, Божок Аркадій Михайлович
МПК: G01L 3/02
Мітки: крутного, вимірювач, моменту
Формула / Реферат:
Вимірювач крутного моменту, що містить ведучий і паралельно розміщений ведений вал, ведучий і ведений шківи, установлені жорстко на ведучому і через гвинтову шарикову пару на веденому валу, упорний підшипник, нерухому опору і пружину, установлену між упорним підшипником і нерухомою опорою, і механізм знімання і передачі сигналу, з'єднаний з веденим шківом, який відрізняється тим, що ведучий і ведений вали розміщені співвісно, а шківи виконані...
Попередній патент: Спосіб захисту трифазного електродвигуна від струмових перевантажень
Наступний патент: Однофазний асинхронний двигун
Випадковий патент: Пристрій керування зачиненням і відчиненням дверей транспортних засобів