Механічний захоплюючий пристрій


Формула / Реферат
Механічний захоплюючий пристрій, що включає привідний пристрій, який має важільний механізм та захоплювач, з'єднаний з привідним пристроєм, і містить корпус, основні губки, закріплені на робочій поверхні передньої стінки корпусу, упорні важелі встановлені всередині корпусу під кутом і кінематично з'єднують передню та задню його стінки, та додаткові утримуючі губки, з'єднані з задньою стінкою корпусу, який має форму еліпсованої пружини, який відрізняється тим, що захоплювач додатково оснащений парою шатунів та парою напрямних, кінематично з'єднаних з корпусом, а пара упорних важелів виконана з додатковим плечем, кінематично з'єднаним за допомогою шатунів з додатковими утримуючими губками, встановленими в напрямних.
Текст
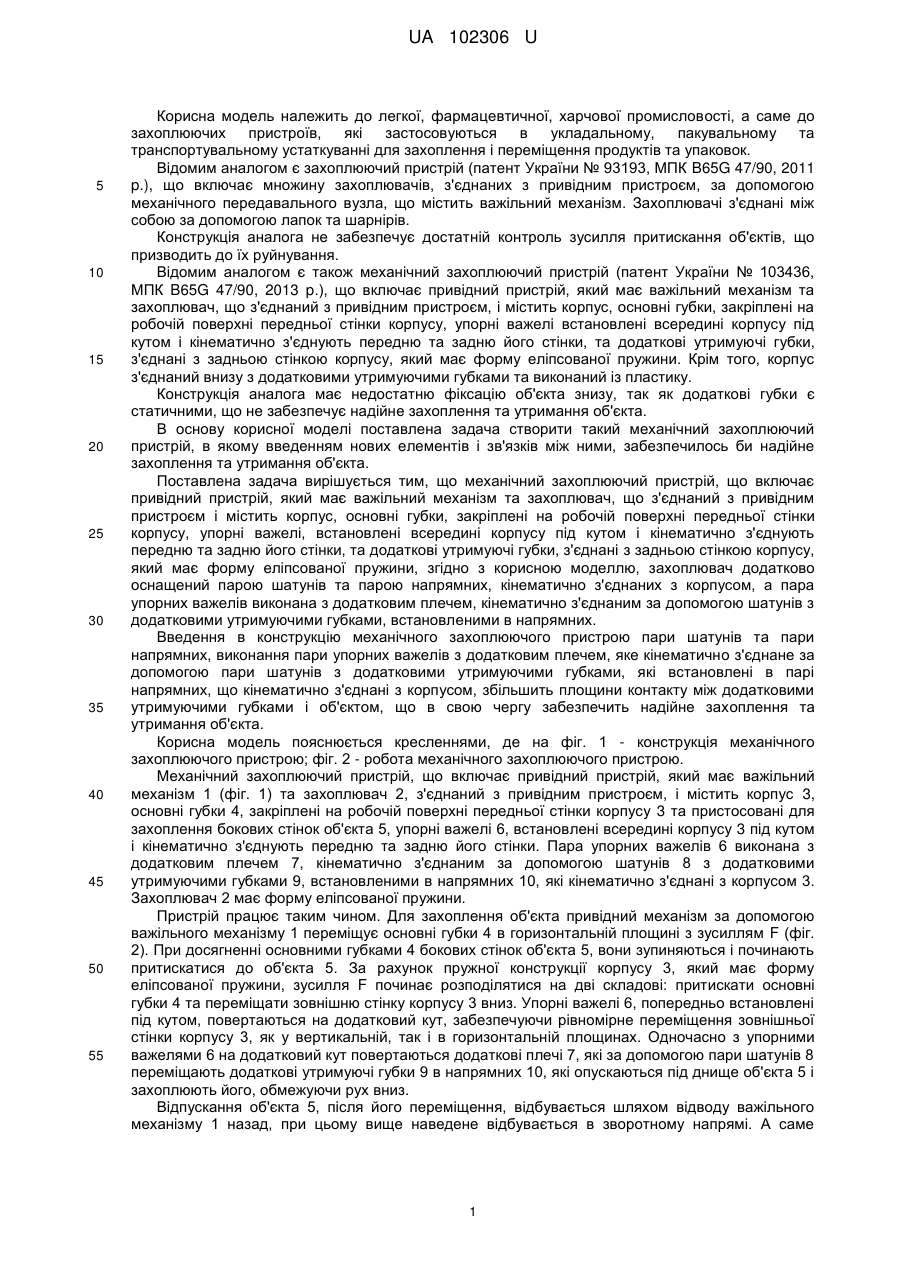
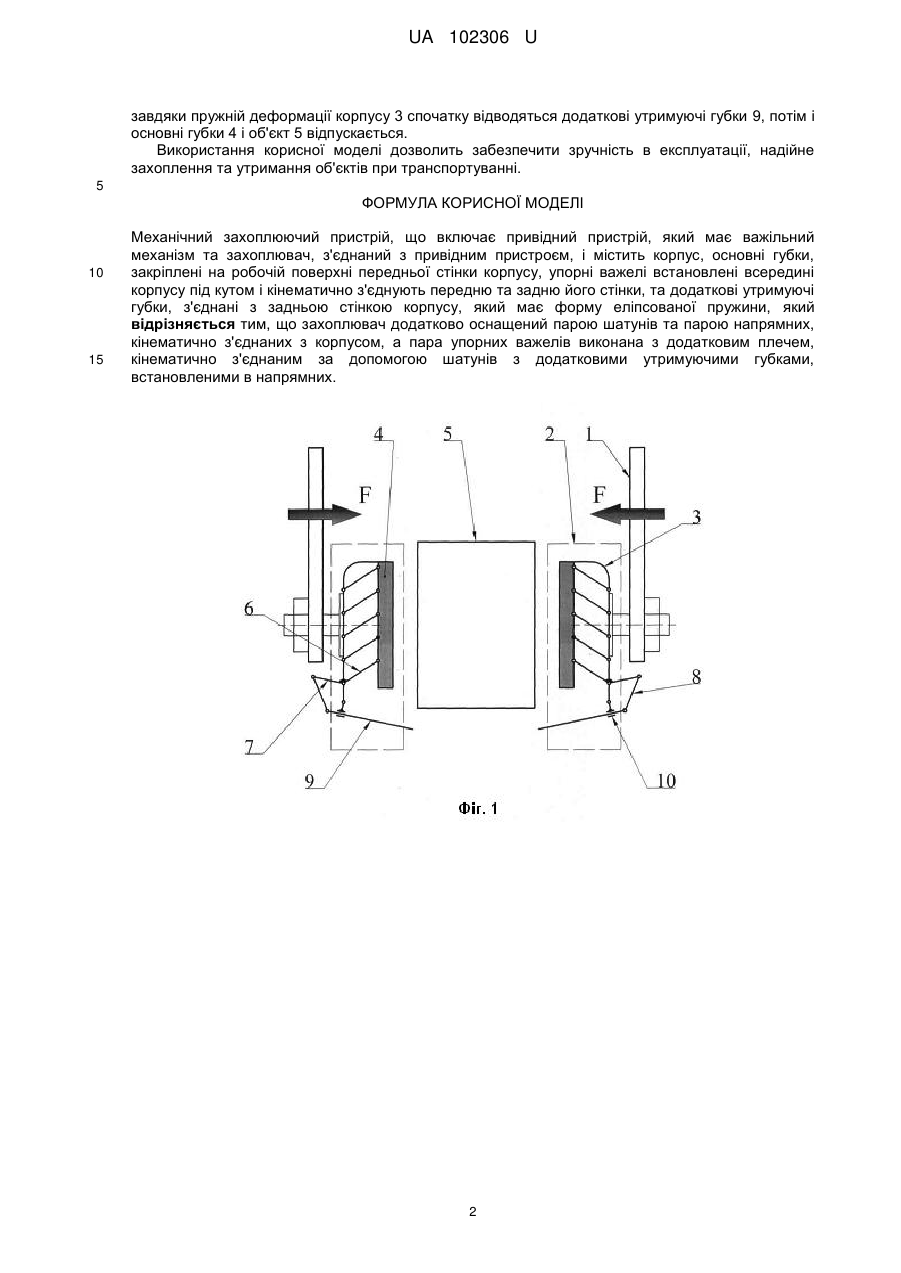
Реферат: UA 102306 U UA 102306 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до легкої, фармацевтичної, харчової промисловості, а саме до захоплюючих пристроїв, які застосовуються в укладальному, пакувальному та транспортувальному устаткуванні для захоплення і переміщення продуктів та упаковок. Відомим аналогом є захоплюючий пристрій (патент України № 93193, МПК B65G 47/90, 2011 p.), що включає множину захоплювачів, з'єднаних з привідним пристроєм, за допомогою механічного передавального вузла, що містить важільний механізм. Захоплювачі з'єднані між собою за допомогою лапок та шарнірів. Конструкція аналога не забезпечує достатній контроль зусилля притискання об'єктів, що призводить до їх руйнування. Відомим аналогом є також механічний захоплюючий пристрій (патент України № 103436, МПК B65G 47/90, 2013 p.), що включає привідний пристрій, який має важільний механізм та захоплювач, що з'єднаний з привідним пристроєм, і містить корпус, основні губки, закріплені на робочій поверхні передньої стінки корпусу, упорні важелі встановлені всередині корпусу під кутом і кінематично з'єднують передню та задню його стінки, та додаткові утримуючі губки, з'єднані з задньою стінкою корпусу, який має форму еліпсованої пружини. Крім того, корпус з'єднаний внизу з додатковими утримуючими губками та виконаний із пластику. Конструкція аналога має недостатню фіксацію об'єкта знизу, так як додаткові губки є статичними, що не забезпечує надійне захоплення та утримання об'єкта. В основу корисної моделі поставлена задача створити такий механічний захоплюючий пристрій, в якому введенням нових елементів і зв'язків між ними, забезпечилось би надійне захоплення та утримання об'єкта. Поставлена задача вирішується тим, що механічний захоплюючий пристрій, що включає привідний пристрій, який має важільний механізм та захоплювач, що з'єднаний з привідним пристроєм і містить корпус, основні губки, закріплені на робочій поверхні передньої стінки корпусу, упорні важелі, встановлені всередині корпусу під кутом і кінематично з'єднують передню та задню його стінки, та додаткові утримуючі губки, з'єднані з задньою стінкою корпусу, який має форму еліпсованої пружини, згідно з корисною моделлю, захоплювач додатково оснащений парою шатунів та парою напрямних, кінематично з'єднаних з корпусом, а пара упорних важелів виконана з додатковим плечем, кінематично з'єднаним за допомогою шатунів з додатковими утримуючими губками, встановленими в напрямних. Введення в конструкцію механічного захоплюючого пристрою пари шатунів та пари напрямних, виконання пари упорних важелів з додатковим плечем, яке кінематично з'єднане за допомогою пари шатунів з додатковими утримуючими губками, які встановлені в парі напрямних, що кінематично з'єднані з корпусом, збільшить площини контакту між додатковими утримуючими губками і об'єктом, що в свою чергу забезпечить надійне захоплення та утримання об'єкта. Корисна модель пояснюється кресленнями, де на фіг. 1 - конструкція механічного захоплюючого пристрою; фіг. 2 - робота механічного захоплюючого пристрою. Механічний захоплюючий пристрій, що включає привідний пристрій, який має важільний механізм 1 (фіг. 1) та захоплювач 2, з'єднаний з привідним пристроєм, і містить корпус 3, основні губки 4, закріплені на робочій поверхні передньої стінки корпусу 3 та пристосовані для захоплення бокових стінок об'єкта 5, упорні важелі 6, встановлені всередині корпусу 3 під кутом і кінематично з'єднують передню та задню його стінки. Пара упорних важелів 6 виконана з додатковим плечем 7, кінематично з'єднаним за допомогою шатунів 8 з додатковими утримуючими губками 9, встановленими в напрямних 10, які кінематично з'єднані з корпусом 3. Захоплювач 2 має форму еліпсованої пружини. Пристрій працює таким чином. Для захоплення об'єкта привідний механізм за допомогою важільного механізму 1 переміщує основні губки 4 в горизонтальній площині з зусиллям F (фіг. 2). При досягненні основними губками 4 бокових стінок об'єкта 5, вони зупиняються і починають притискатися до об'єкта 5. За рахунок пружної конструкції корпусу 3, який має форму еліпсованої пружини, зусилля F починає розподілятися на дві складові: притискати основні губки 4 та переміщати зовнішню стінку корпусу 3 вниз. Упорні важелі 6, попередньо встановлені під кутом, повертаються на додатковий кут, забезпечуючи рівномірне переміщення зовнішньої стінки корпусу 3, як у вертикальній, так і в горизонтальній площинах. Одночасно з упорними важелями 6 на додатковий кут повертаються додаткові плечі 7, які за допомогою пари шатунів 8 переміщають додаткові утримуючі губки 9 в напрямних 10, які опускаються під днище об'єкта 5 і захоплюють його, обмежуючи рух вниз. Відпускання об'єкта 5, після його переміщення, відбувається шляхом відводу важільного механізму 1 назад, при цьому вище наведене відбувається в зворотному напрямі. А саме 1 UA 102306 U завдяки пружній деформації корпусу 3 спочатку відводяться додаткові утримуючі губки 9, потім і основні губки 4 і об'єкт 5 відпускається. Використання корисної моделі дозволить забезпечити зручність в експлуатації, надійне захоплення та утримання об'єктів при транспортуванні. 5 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 Механічний захоплюючий пристрій, що включає привідний пристрій, який має важільний механізм та захоплювач, з'єднаний з привідним пристроєм, і містить корпус, основні губки, закріплені на робочій поверхні передньої стінки корпусу, упорні важелі встановлені всередині корпусу під кутом і кінематично з'єднують передню та задню його стінки, та додаткові утримуючі губки, з'єднані з задньою стінкою корпусу, який має форму еліпсованої пружини, який відрізняється тим, що захоплювач додатково оснащений парою шатунів та парою напрямних, кінематично з'єднаних з корпусом, а пара упорних важелів виконана з додатковим плечем, кінематично з'єднаним за допомогою шатунів з додатковими утримуючими губками, встановленими в напрямних. 2 UA 102306 U Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMechanical gripping device
Автори англійськоюMakatyora Dmytro Anatoliyovych
Назва патенту російськоюМеханическое захватывающее устройство
Автори російськоюМакатёра Дмитрий Анатолиевич
МПК / Мітки
МПК: B65G 47/90
Мітки: захоплюючий, механічний, пристрій
Код посилання
<a href="https://ua.patents.su/5-102306-mekhanichnijj-zakhoplyuyuchijj-pristrijj.html" target="_blank" rel="follow" title="База патентів України">Механічний захоплюючий пристрій</a>
Механічний захоплюючий пристрій
Номер патенту: 103436
Опубліковано: 10.10.2013
Автори: Іванова Людмила Іллівна, Якимчук Микола Володимирович
МПК: B65B 35/16, B65G 47/90
Мітки: пристрій, захоплюючий, механічний
Формула / Реферат:
Механічний захоплюючий пристрій, що включає захоплювач, з'єднаний з привідним пристроєм, який має механічний передавальний вузол, що містить важільний механізм до захоплювача, який відрізняється тим, що має основні накладні губки, виконані з еластичного матеріалу, приєднані до робочої поверхні частини корпусу захоплюючого пристрою, який має форму еліпсованої пружини та виконаний із пластику, всередині корпусу розташовані під кутом упорні...
Механічний захоплюючий пристрій

Номер патенту: 80291
Опубліковано: 27.05.2013
Автори: Іванова Людмила Іллівна, Якимчук Микола Володимирович
МПК: B65B 35/16, B65G 47/90
Мітки: захоплюючий, механічний, пристрій
Формула / Реферат:
Механічний захоплюючий пристрій, що містить захоплювач, з'єднаний з привідним пристроєм, який має механічний передавальний вузол, що містить важільний механізм до захоплювача, який відрізняється тим, що захоплюючий пристрій має основні накладні губки, виконані з еластичного матеріалу, приєднані до передньої частини корпуса захоплюючого пристрою, який має форму еліпсованої пружини та виконаний зі спеціального пластика, всередині корпуса...
Механічний захоплюючий пристрій
Номер патенту: 70067
Опубліковано: 25.05.2012
Автори: Дороніна Катерина Михайлівна, Захаревич Валерій Болеславович, Бородавка Ярослав Сергійович, Волчко Анатолій Іванович, Гавва Олександр Миколайович
МПК: B66C 1/58
Мітки: захоплюючий, механічний, пристрій
Формула / Реферат:
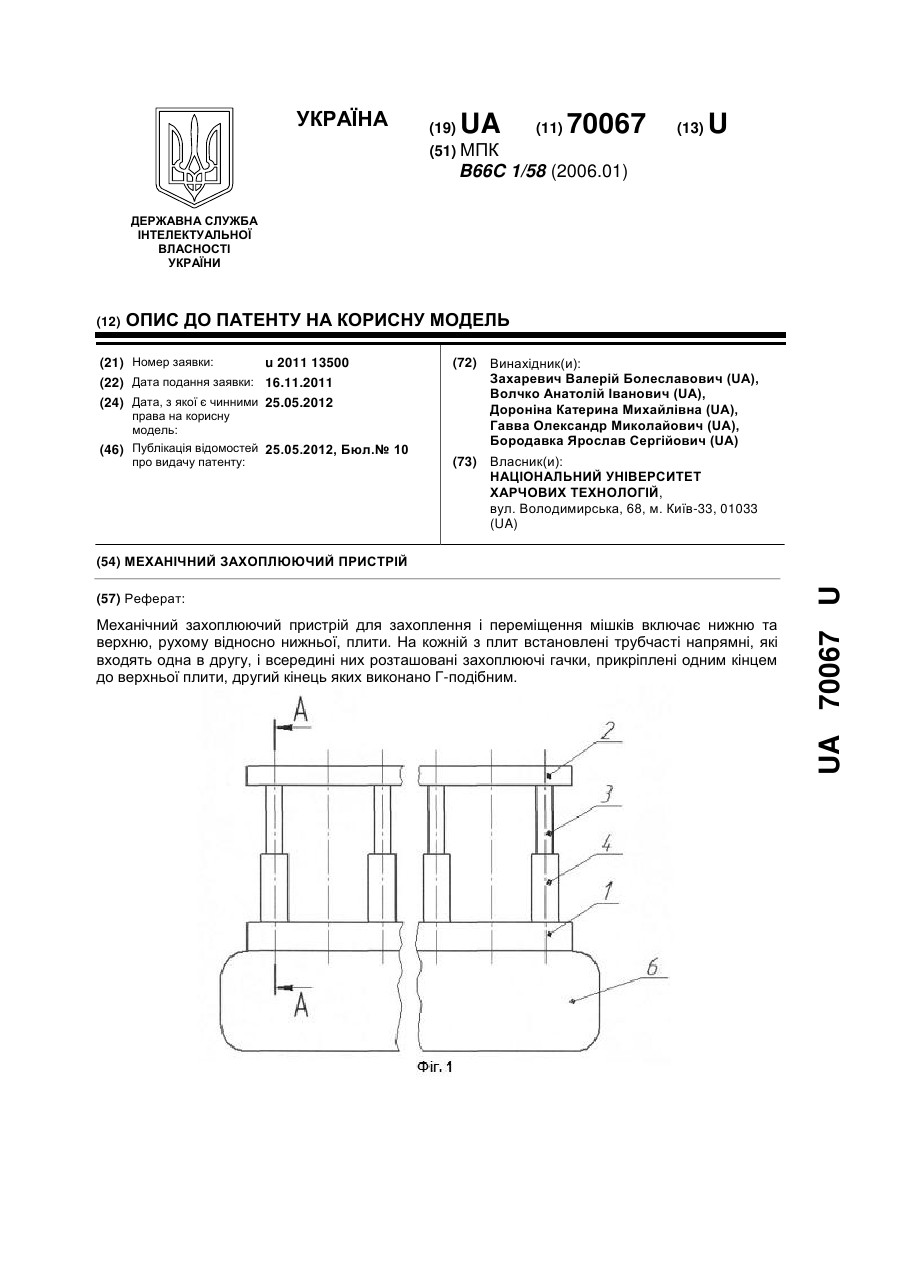
Механічний захоплюючий пристрій для захоплення і переміщення мішків, що включає нижню та верхню, рухому відносно нижньої, плити, який відрізняється тим, що на кожній з плит встановлені трубчасті напрямні, які входять одна в другу, і всередині них розміщуються захоплюючі гачки, прикріплені одним кінцем до верхньої плити, а другий кінець яких виконано Г-подібним.
Механічний захоплюючий пристрій

Номер патенту: 101109
Опубліковано: 25.02.2013
Автори: Волчко Анатолій Іванович, Захаревич Валерій Болеславович, Дороніна Катерина Михайлівна, Гавва Олександр Миколайович, Бородавка Ярослав Сергійович
МПК: B66C 1/58
Мітки: пристрій, механічний, захоплюючий
Формула / Реферат:
Механічний захоплюючий пристрій для захоплення і переміщення мішків, що включає нижню та верхню, рухому відносно нижньої, плити, який відрізняється тим, що на кожній з плит встановлені трубчасті напрямні, які входять одна в другу, всередині них розміщуються захоплюючі гачки, прикріплені одним кінцем до верхньої плити, а другий кінець яких виконано з можливістю прийняття в мішку Г-подібної форми.
Комбінований захоплюючий пристрій

Номер патенту: 70384
Опубліковано: 11.06.2012
Автори: Іванова Людмила Іллівна, Якимчук Микола Володимирович, Нагорна Вікторія Владиславівна
МПК: B65G 47/91
Мітки: захоплюючий, комбінований, пристрій
Формула / Реферат:
Комбінований захоплюючий пристрій, що містить множину захоплювачів, з'єднаних з привідним пристроєм, який має механічний передавальний вузол, що містить важільний механізм до захоплювачів, який відрізняється тим, що захоплюючий пристрій містить систему важелів і шарнірів для руху лап, з'єднаних з накладними планками, та поєднану з нею систему важелів і шарнірів для руху вакуумного захоплюючого пристрою, який містить множину вакуумних...
Попередній патент: Зубчаста передача
Наступний патент: Портативний тестер амортизаторів автомобілів
Випадковий патент: Механізм відтягнення полотна круглов'язальної машини