Механічний захоплюючий пристрій
Номер патенту: 80291
Опубліковано: 27.05.2013
Автори: Іванова Людмила Іллівна, Якимчук Микола Володимирович


Формула / Реферат
Механічний захоплюючий пристрій, що містить захоплювач, з'єднаний з привідним пристроєм, який має механічний передавальний вузол, що містить важільний механізм до захоплювача, який відрізняється тим, що захоплюючий пристрій має основні накладні губки, виконані з еластичного матеріалу, приєднані до передньої частини корпуса захоплюючого пристрою, який має форму еліпсованої пружини та виконаний зі спеціального пластика, всередині корпуса розташовані під кутом упорні важелі, пов'язані на кінцях з шарнірними з'єднаннями, одне з яких з'єднане з задньою стінкою корпуса захоплюючого пристрою, а друге - з передньою, внизу корпус захоплюючого пристрою з'єднаний з додатковими утримуючими губками, а задня стінка корпуса зв'язана з передавальним вузлом.
Текст
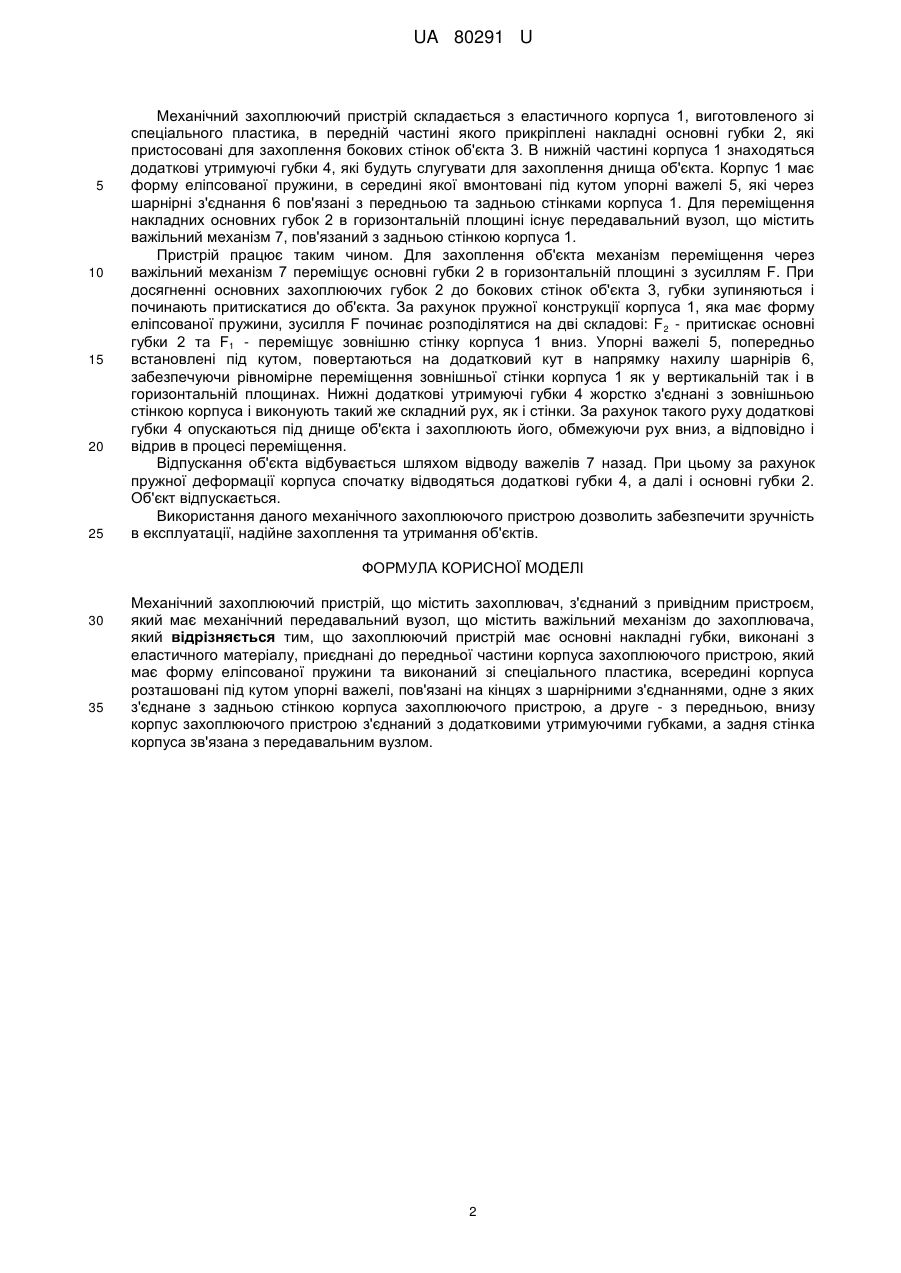
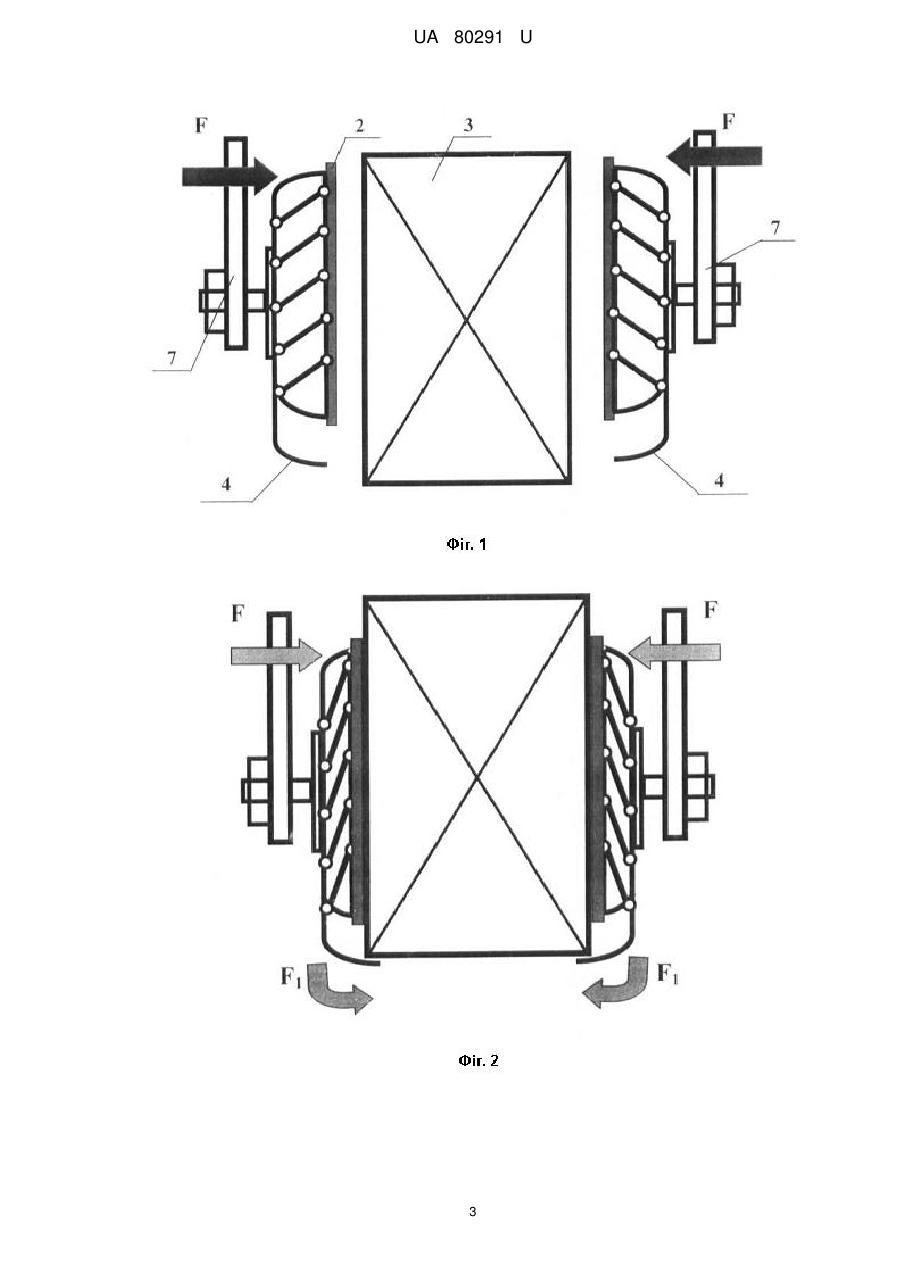
Реферат: UA 80291 U UA 80291 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до харчової промисловості, а саме до захоплюючих пристроїв, які застосовуються наприклад в укладальному та пакувальному устаткуванні для захоплення і переміщення продуктів та упаковок. Відомі пристрої (US 6439631, 27.01.2002; US 5839769, 24.11.1998), які виконані у формі захоплюючих головок, у яких об'єднана велика кількість одиничних захоплювачів, що мають вигляд вакуумних головок. Захоплювачі встановлюються на рамі, разом з якою вони переміщуються, тобто, зокрема, опускаються до пакованого продукту, який треба захопити, піднімаються з захопленими продуктами і переміщуються за заданою траєкторією. Але нерівномірний знос присосок суттєво впливає на якість захоплення всіх упаковок в шарі. В такому випадку можливий відрив одиничної упаковки. Відомий захоплюючий пристрій [патент та винахід № 93193, опубл. Бюл. № 2 2011 p.]. Він містить захоплюючий пристрій з множиною захоплювачів, з'єднаний з привідним пристроєм, механічний передавальний вузол, що містить важільний механізм до захоплювачів. Захоплювачі з'єднані за допомогою лапок та шарнірів. Але цей пристрій має обмеження зусилля притискання об'єктів, які мають таку жорсткість поверхні, що призводить до її руйнування. Зміна матеріалу об'єкта призводить до зміни коефіцієнта тертя та зусилля утримання, що може призвести до відриву об'єкта. Також для забезпечення зусилля утримання при зміні матеріалу об'єкта, треба замінювати накладки губок захоплюючого пристрою. В основу корисної моделі поставлено задачу створення механічного захоплюючого пристрою шляхом використання еластичних властивостей основних губок, які мають власну жорсткість та шорсткість, використання рівномірного розподілу зусилля по всій поверхні основних губок, одночасного використання в захоплюючому пристрої основних та додаткових утримуючих губок, рух яких забезпечує один передавальний вузол, забезпечує надійне захоплення та утримання упаковок за рахунок збільшення сили утримання основними губками та додаткової фіксації додатковими утримуючими губками. Причому додаткові утримуючі губки в нижній частині поверхні призводять до надійного перенесення об'єктів з малою жорсткістю поверхні та відсутнє їх руйнування. В конструкції відсутні змінні накладки для губок. Відрив об'єктів в процесі переміщення неможливий за рахунок особливої конструкції захоплюючого пристрою. Важливо те, що один привод приводить в рух основні та додаткові утримуючі губки. Спеціальний матеріал губок має еластичні властивості і частково компенсує зусилля притискання за рахунок власної жорсткості та шорсткості конструкції механізму, що дозволяє розподілити зусилля рівномірно по всій поверхні основних губок. Поставлена задача вирішується тим, що механічний захоплюючий пристрій містить захоплювач, з'єднаний з приводним пристроєм, який має механічний передавальний вузол, що містить важільний механізм до захоплювача. Згідно з корисною моделлю, захоплюючий пристрій має основні накладні губки, виконані з еластичного матеріалу, приєднані до передньої частини корпуса захоплюючого пристрою, який має форму еліпсованої пружини та виконаний зі спеціального пластика, всередині корпуса розташовані під кутом упорні важелі, пов'язані на кінцях з шарнірними з'єднаннями, одне з яких з'єднане з задньою стінкою корпуса захоплюючого пристрою, а друге з передньою, внизу корпус захоплюючого пристрою з'єднаний з додатковими утримуючими губками, а задня стінка корпуса зв'язана з передавальним вузлом. Виконання основних накладних губок з еластичного матеріалу - рішення відоме. Виконання захоплюючого пристрою у вигляді, який має форму еліпсованої пружини, та виконаного зі спеціального пластика, на передній частині якого виконано основні накладні губки, а в нижній додаткові утримуючі губки - рішення нове. Розташування під кутом всередині корпуса упорних важелів, пов'язаних на кінцях з шарнірами, один з яких з'єднаний з задньою стінкою корпуса, а другий - з попередньою, з'єднання нижньої частини корпуса з додатковими утримуючими губками - рішення відоме. З'єднання захоплюючого пристрою з передавальним вузлом - рішення відоме. Поєднання нових технічних рішень з раніше відомими дозволяє отримати новий технічний результат, який полягає в тому, що забезпечується надійне захоплення та утримання упаковок за рахунок рівномірного розподілення сили утримання основними губками та додаткової фіксації додатковими утримуючими губками, та забезпечити діяльність тонких поверхонь упаковок в місцях захоплення. На фіг. 1 - Конструкція механічного захоплюючого пристрою. На фіг. 2 - Робота механічного захоплюючого пристрою. На фіг. 3 - Конструкція упорних важелів в механічному захоплюючому пристрої. 1 UA 80291 U 5 10 15 20 25 Механічний захоплюючий пристрій складається з еластичного корпуса 1, виготовленого зі спеціального пластика, в передній частині якого прикріплені накладні основні губки 2, які пристосовані для захоплення бокових стінок об'єкта 3. В нижній частині корпуса 1 знаходяться додаткові утримуючі губки 4, які будуть слугувати для захоплення днища об'єкта. Корпус 1 має форму еліпсованої пружини, в середині якої вмонтовані під кутом упорні важелі 5, які через шарнірні з'єднання 6 пов'язані з передньою та задньою стінками корпуса 1. Для переміщення накладних основних губок 2 в горизонтальній площині існує передавальний вузол, що містить важільний механізм 7, пов'язаний з задньою стінкою корпуса 1. Пристрій працює таким чином. Для захоплення об'єкта механізм переміщення через важільний механізм 7 переміщує основні губки 2 в горизонтальній площині з зусиллям F. При досягненні основних захоплюючих губок 2 до бокових стінок об'єкта 3, губки зупиняються і починають притискатися до об'єкта. За рахунок пружної конструкції корпуса 1, яка має форму еліпсованої пружини, зусилля F починає розподілятися на дві складові: F 2 - притискає основні губки 2 та F1 - переміщує зовнішню стінку корпуса 1 вниз. Упорні важелі 5, попередньо встановлені під кутом, повертаються на додатковий кут в напрямку нахилу шарнірів 6, забезпечуючи рівномірне переміщення зовнішньої стінки корпуса 1 як у вертикальній так і в горизонтальній площинах. Нижні додаткові утримуючі губки 4 жорстко з'єднані з зовнішньою стінкою корпуса і виконують такий же складний рух, як і стінки. За рахунок такого руху додаткові губки 4 опускаються під днище об'єкта і захоплюють його, обмежуючи рух вниз, а відповідно і відрив в процесі переміщення. Відпускання об'єкта відбувається шляхом відводу важелів 7 назад. При цьому за рахунок пружної деформації корпуса спочатку відводяться додаткові губки 4, а далі і основні губки 2. Об'єкт відпускається. Використання даного механічного захоплюючого пристрою дозволить забезпечити зручність в експлуатації, надійне захоплення та утримання об'єктів. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 Механічний захоплюючий пристрій, що містить захоплювач, з'єднаний з привідним пристроєм, який має механічний передавальний вузол, що містить важільний механізм до захоплювача, який відрізняється тим, що захоплюючий пристрій має основні накладні губки, виконані з еластичного матеріалу, приєднані до передньої частини корпуса захоплюючого пристрою, який має форму еліпсованої пружини та виконаний зі спеціального пластика, всередині корпуса розташовані під кутом упорні важелі, пов'язані на кінцях з шарнірними з'єднаннями, одне з яких з'єднане з задньою стінкою корпуса захоплюючого пристрою, а друге - з передньою, внизу корпус захоплюючого пристрою з'єднаний з додатковими утримуючими губками, а задня стінка корпуса зв'язана з передавальним вузлом. 2 UA 80291 U 3 UA 80291 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMechanical gripping device
Автори англійськоюYakymchuk Mykola Volodymyrovych, Ivanova Liudmyla Illivna
Назва патенту російськоюМеханическое захватное устройство
Автори російськоюЯкимчук Николай Владимирович, Иванова Людмила Ильинична
МПК / Мітки
МПК: B65B 35/16, B65G 47/90
Мітки: захоплюючий, механічний, пристрій
Код посилання
<a href="https://ua.patents.su/6-80291-mekhanichnijj-zakhoplyuyuchijj-pristrijj.html" target="_blank" rel="follow" title="База патентів України">Механічний захоплюючий пристрій</a>
Механічний захоплюючий пристрій
Номер патенту: 70067
Опубліковано: 25.05.2012
Автори: Бородавка Ярослав Сергійович, Дороніна Катерина Михайлівна, Волчко Анатолій Іванович, Захаревич Валерій Болеславович, Гавва Олександр Миколайович
МПК: B66C 1/58
Мітки: механічний, захоплюючий, пристрій
Формула / Реферат:
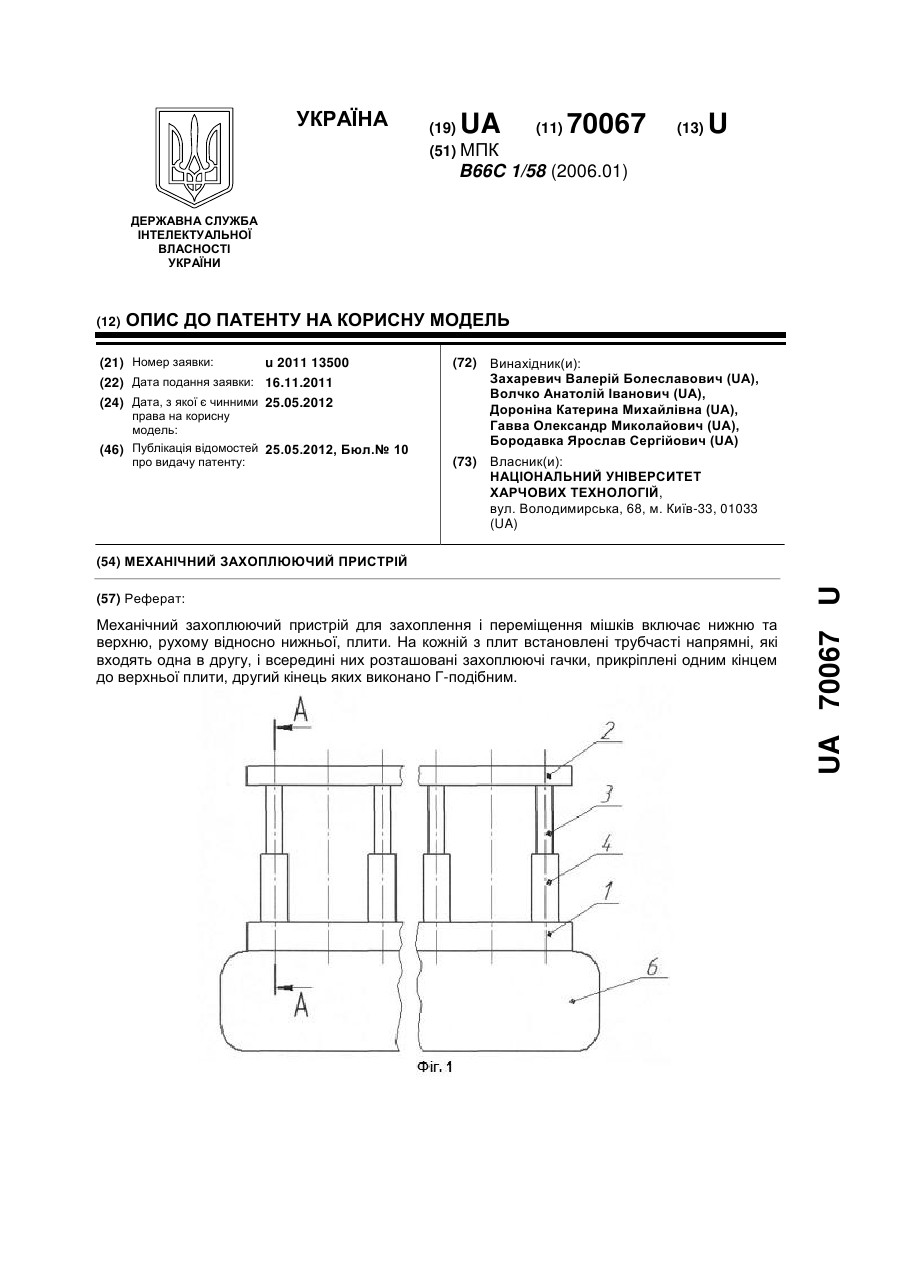
Механічний захоплюючий пристрій для захоплення і переміщення мішків, що включає нижню та верхню, рухому відносно нижньої, плити, який відрізняється тим, що на кожній з плит встановлені трубчасті напрямні, які входять одна в другу, і всередині них розміщуються захоплюючі гачки, прикріплені одним кінцем до верхньої плити, а другий кінець яких виконано Г-подібним.
Механічний захоплюючий пристрій

Номер патенту: 101109
Опубліковано: 25.02.2013
Автори: Дороніна Катерина Михайлівна, Волчко Анатолій Іванович, Гавва Олександр Миколайович, Бородавка Ярослав Сергійович, Захаревич Валерій Болеславович
МПК: B66C 1/58
Мітки: захоплюючий, пристрій, механічний
Формула / Реферат:
Механічний захоплюючий пристрій для захоплення і переміщення мішків, що включає нижню та верхню, рухому відносно нижньої, плити, який відрізняється тим, що на кожній з плит встановлені трубчасті напрямні, які входять одна в другу, всередині них розміщуються захоплюючі гачки, прикріплені одним кінцем до верхньої плити, а другий кінець яких виконано з можливістю прийняття в мішку Г-подібної форми.
Комбінований захоплюючий пристрій

Номер патенту: 70384
Опубліковано: 11.06.2012
Автори: Якимчук Микола Володимирович, Іванова Людмила Іллівна, Нагорна Вікторія Владиславівна
МПК: B65G 47/91
Мітки: захоплюючий, комбінований, пристрій
Формула / Реферат:
Комбінований захоплюючий пристрій, що містить множину захоплювачів, з'єднаних з привідним пристроєм, який має механічний передавальний вузол, що містить важільний механізм до захоплювачів, який відрізняється тим, що захоплюючий пристрій містить систему важелів і шарнірів для руху лап, з'єднаних з накладними планками, та поєднану з нею систему важелів і шарнірів для руху вакуумного захоплюючого пристрою, який містить множину вакуумних...
Захоплюючий пристрій маніпулятора
Номер патенту: 68761
Опубліковано: 10.04.2012
Автори: Кузнєцов Юрій Миколайович, Фоменкова Анастасія Олексіївна, Резенчук Олена Євгенівна
МПК: B25J 15/00
Мітки: пристрій, маніпулятора, захоплюючий
Формула / Реферат:
Захоплюючий пристрій маніпулятора, що містить циліндричний пустотілий корпус, упорну гайку, трубку, порожнина якої має можливість зв'язуватись з джерелом живлення робочого середовища, який відрізняється тим, що трубка виконана у вигляді гвинтової спіралі з неметалевого матеріалу поверх циліндричного пустотілого корпуса, завальцьований кінець трубки розміщений всередині упорної гайки, що виконана з неметалевого матеріалу, а відкритий прямий...
Захоплюючий пристрій

Номер патенту: 15565
Опубліковано: 17.07.2006
Автори: Філяк Михайло Йосипович, Гук Зіновій Васильович
МПК: B66C 1/62
Мітки: пристрій, захоплюючий
Формула / Реферат:
1. Захоплюючий пристрій, що містить верхню скобу і циліндричний корпус, який відрізняється тим, що в нижній відносно скоби частині корпус виконаний з наскрізним пазом, нахиленим до осі корпусу з верхнім розташуванням входу в паз, вхід в паз перекритий С-подібною нахиленою касетою з розташуванням входу в касету на стику з пазом, просвіт С-подібної касети в профіль відповідає просвіту паза, в якому в поперечній до осі корпусу площині вільно...
Попередній патент: Спосіб приготування пивного сусла із зернового екстракту тритикале
Наступний патент: Спосіб кристалізації цукрового утфелю останнього ступеня кристалізації
Випадковий патент: Спосіб виготовлення виливків у формах з сипкого піску