Комбінований захоплюючий пристрій
Номер патенту: 70384
Опубліковано: 11.06.2012
Автори: Нагорна Вікторія Владиславівна, Іванова Людмила Іллівна, Якимчук Микола Володимирович

Формула / Реферат
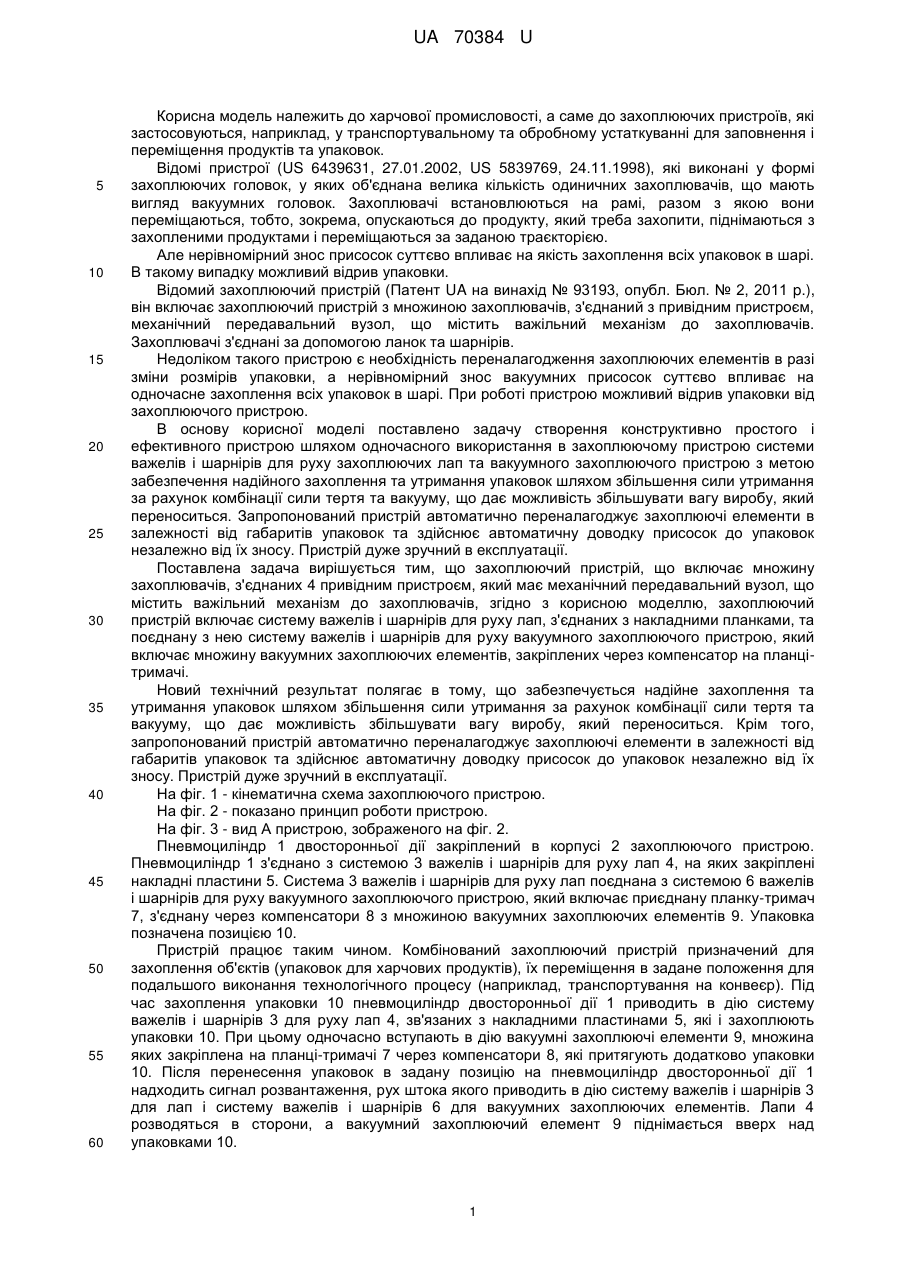
Комбінований захоплюючий пристрій, що містить множину захоплювачів, з'єднаних з привідним пристроєм, який має механічний передавальний вузол, що містить важільний механізм до захоплювачів, який відрізняється тим, що захоплюючий пристрій містить систему важелів і шарнірів для руху лап, з'єднаних з накладними планками, та поєднану з нею систему важелів і шарнірів для руху вакуумного захоплюючого пристрою, який містить множину вакуумних захоплюючих елементів, закріплених через компенсатори на планці-тримачі.
Текст
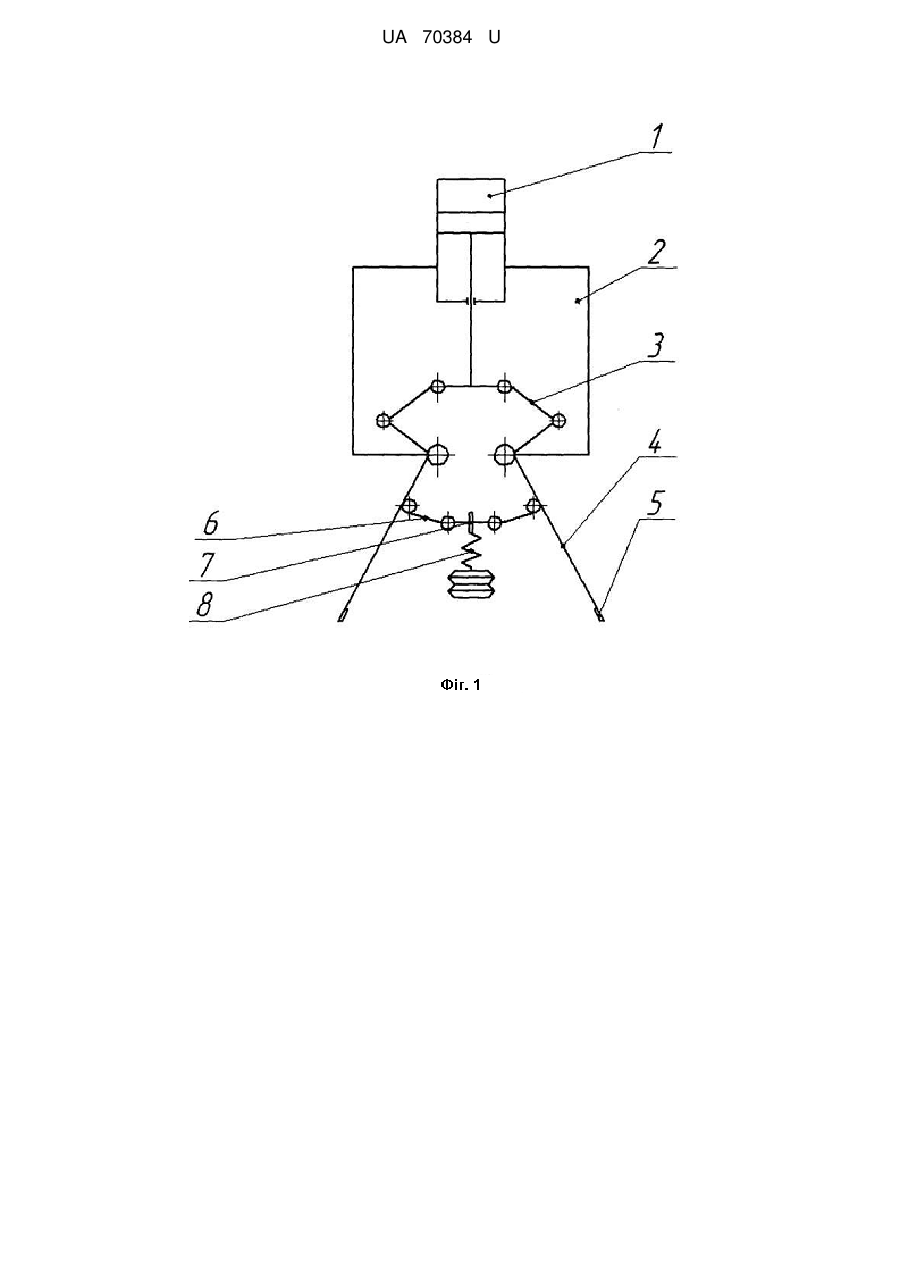
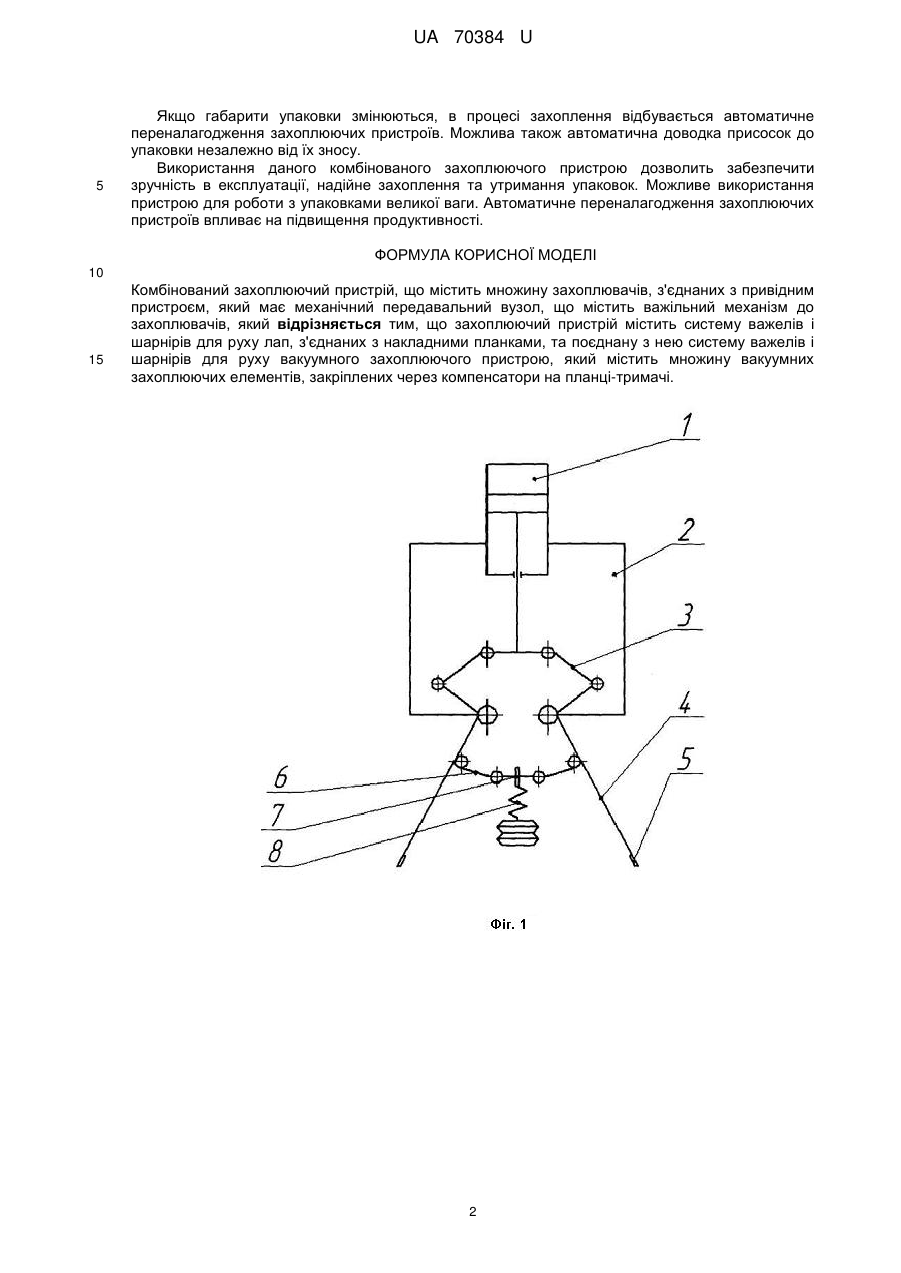
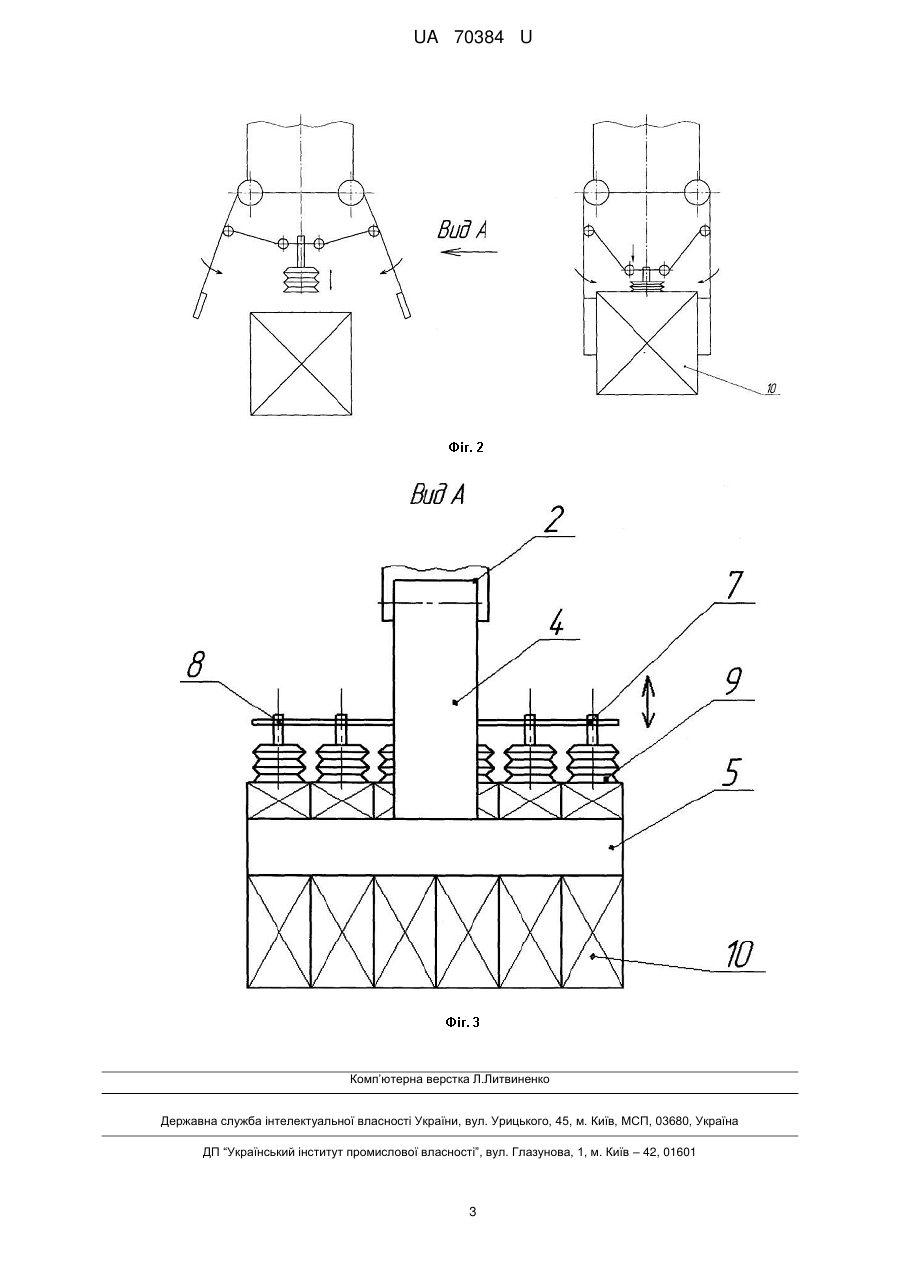
Реферат: UA 70384 U UA 70384 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до харчової промисловості, а саме до захоплюючих пристроїв, які застосовуються, наприклад, у транспортувальному та обробному устаткуванні для заповнення і переміщення продуктів та упаковок. Відомі пристрої (US 6439631, 27.01.2002, US 5839769, 24.11.1998), які виконані у формі захоплюючих головок, у яких об'єднана велика кількість одиничних захоплювачів, що мають вигляд вакуумних головок. Захоплювачі встановлюються на рамі, разом з якою вони переміщаються, тобто, зокрема, опускаються до продукту, який треба захопити, піднімаються з захопленими продуктами і переміщаються за заданою траєкторією. Але нерівномірний знос присосок суттєво впливає на якість захоплення всіх упаковок в шарі. В такому випадку можливий відрив упаковки. Відомий захоплюючий пристрій (Патент UA на винахід № 93193, опубл. Бюл. № 2, 2011 p.), він включає захоплюючий пристрій з множиною захоплювачів, з'єднаний з привідним пристроєм, механічний передавальний вузол, що містить важільний механізм до захоплювачів. Захоплювачі з'єднані за допомогою ланок та шарнірів. Недоліком такого пристрою є необхідність переналагодження захоплюючих елементів в разі зміни розмірів упаковки, а нерівномірний знос вакуумних присосок суттєво впливає на одночасне захоплення всіх упаковок в шарі. При роботі пристрою можливий відрив упаковки від захоплюючого пристрою. В основу корисної моделі поставлено задачу створення конструктивно простого і ефективного пристрою шляхом одночасного використання в захоплюючому пристрою системи важелів і шарнірів для руху захоплюючих лап та вакуумного захоплюючого пристрою з метою забезпечення надійного захоплення та утримання упаковок шляхом збільшення сили утримання за рахунок комбінації сили тертя та вакууму, що дає можливість збільшувати вагу виробу, який переноситься. Запропонований пристрій автоматично переналагоджує захоплюючі елементи в залежності від габаритів упаковок та здійснює автоматичну доводку присосок до упаковок незалежно від їх зносу. Пристрій дуже зручний в експлуатації. Поставлена задача вирішується тим, що захоплюючий пристрій, що включає множину захоплювачів, з'єднаних 4 привідним пристроєм, який має механічний передавальний вузол, що містить важільний механізм до захоплювачів, згідно з корисною моделлю, захоплюючий пристрій включає систему важелів і шарнірів для руху лап, з'єднаних з накладними планками, та поєднану з нею систему важелів і шарнірів для руху вакуумного захоплюючого пристрою, який включає множину вакуумних захоплюючих елементів, закріплених через компенсатор на планцітримачі. Новий технічний результат полягає в тому, що забезпечується надійне захоплення та утримання упаковок шляхом збільшення сили утримання за рахунок комбінації сили тертя та вакууму, що дає можливість збільшувати вагу виробу, який переноситься. Крім того, запропонований пристрій автоматично переналагоджує захоплюючі елементи в залежності від габаритів упаковок та здійснює автоматичну доводку присосок до упаковок незалежно від їх зносу. Пристрій дуже зручний в експлуатації. На фіг. 1 - кінематична схема захоплюючого пристрою. На фіг. 2 - показано принцип роботи пристрою. На фіг. 3 - вид А пристрою, зображеного на фіг. 2. Пневмоциліндр 1 двосторонньої дії закріплений в корпусі 2 захоплюючого пристрою. Пневмоциліндр 1 з'єднано з системою 3 важелів і шарнірів для руху лап 4, на яких закріплені накладні пластини 5. Система 3 важелів і шарнірів для руху лап поєднана з системою 6 важелів і шарнірів для руху вакуумного захоплюючого пристрою, який включає приєднану планку-тримач 7, з'єднану через компенсатори 8 з множиною вакуумних захоплюючих елементів 9. Упаковка позначена позицією 10. Пристрій працює таким чином. Комбінований захоплюючий пристрій призначений для захоплення об'єктів (упаковок для харчових продуктів), їх переміщення в задане положення для подальшого виконання технологічного процесу (наприклад, транспортування на конвеєр). Під час захоплення упаковки 10 пневмоциліндр двосторонньої дії 1 приводить в дію систему важелів і шарнірів 3 для руху лап 4, зв'язаних з накладними пластинами 5, які і захоплюють упаковки 10. При цьому одночасно вступають в дію вакуумні захоплюючі елементи 9, множина яких закріплена на планці-тримачі 7 через компенсатори 8, які притягують додатково упаковки 10. Після перенесення упаковок в задану позицію на пневмоциліндр двосторонньої дії 1 надходить сигнал розвантаження, рух штока якого приводить в дію системуважелів і шарнірів 3 для лап і систему важелів і шарнірів 6 для вакуумних захоплюючих елементів. Лапи 4 розводяться в сторони, а вакуумний захоплюючий елемент 9 піднімається вверх над упаковками 10. 1 UA 70384 U 5 Якщо габарити упаковки змінюються, в процесі захоплення відбувається автоматичне переналагодження захоплюючих пристроїв. Можлива також автоматична доводка присосок до упаковки незалежно від їх зносу. Використання даного комбінованого захоплюючого пристрою дозволить забезпечити зручність в експлуатації, надійне захоплення та утримання упаковок. Можливе використання пристрою для роботи з упаковками великої ваги. Автоматичне переналагодження захоплюючих пристроїв впливає на підвищення продуктивності. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 Комбінований захоплюючий пристрій, що містить множину захоплювачів, з'єднаних з привідним пристроєм, який має механічний передавальний вузол, що містить важільний механізм до захоплювачів, який відрізняється тим, що захоплюючий пристрій містить систему важелів і шарнірів для руху лап, з'єднаних з накладними планками, та поєднану з нею систему важелів і шарнірів для руху вакуумного захоплюючого пристрою, який містить множину вакуумних захоплюючих елементів, закріплених через компенсатори на планці-тримачі. 2 UA 70384 U Комп’ютерна верстка Л.Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюCombined gripping device
Автори англійськоюYakymchuk Mykola Volodymyrovych, Ivanova Liudmyla Illivna, Nahorna Viktoria Vladyslavivna
Назва патенту російськоюКомбинированное захватное устройство
Автори російськоюЯкимчук Николай Владимирович, Иванова Людмила Ильинична, Нагорная Виктория Владиславовна
МПК / Мітки
МПК: B65G 47/91
Мітки: захоплюючий, пристрій, комбінований
Код посилання
<a href="https://ua.patents.su/5-70384-kombinovanijj-zakhoplyuyuchijj-pristrijj.html" target="_blank" rel="follow" title="База патентів України">Комбінований захоплюючий пристрій</a>
Механічний захоплюючий пристрій
Номер патенту: 70067
Опубліковано: 25.05.2012
Автори: Бородавка Ярослав Сергійович, Дороніна Катерина Михайлівна, Захаревич Валерій Болеславович, Гавва Олександр Миколайович, Волчко Анатолій Іванович
МПК: B66C 1/58
Мітки: пристрій, механічний, захоплюючий
Формула / Реферат:
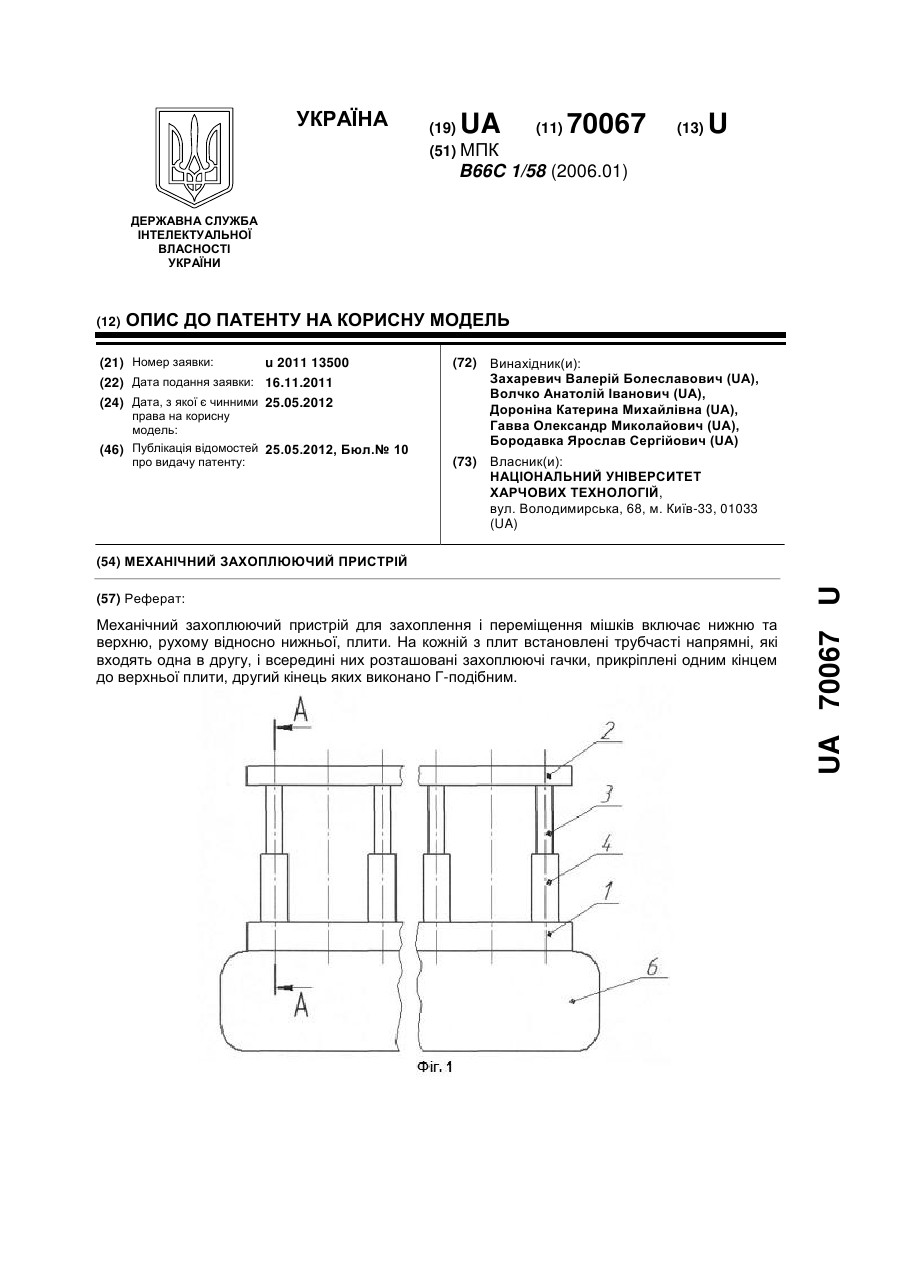
Механічний захоплюючий пристрій для захоплення і переміщення мішків, що включає нижню та верхню, рухому відносно нижньої, плити, який відрізняється тим, що на кожній з плит встановлені трубчасті напрямні, які входять одна в другу, і всередині них розміщуються захоплюючі гачки, прикріплені одним кінцем до верхньої плити, а другий кінець яких виконано Г-подібним.
Захоплюючий пристрій

Номер патенту: 93193
Опубліковано: 25.01.2011
Автори: Вілд Ханс-Петер, Крафт Еберхард, Лехерт Франк
МПК: B65G 47/91, B65G 47/90
Мітки: захоплюючий, пристрій
Формула / Реферат:
1. Захоплюючий пристрій (1) з множиною захоплювачів (5), які розташовані в першій позиції з першим заданим кроком (А) між ними, що має привідний пристрій (7) для переміщення захоплювачів (5) щонайменше в одну другу позицію, в якій захоплювачі (5) розташовані із другим заданим кроком (В) між ними, привід (7) має механічний передавальний вузол (9), який містить важільний механізм до захоплювачів (5), а передавальний вузол (9) для кожного...
Захоплюючий пристрій

Номер патенту: 15565
Опубліковано: 17.07.2006
Автори: Гук Зіновій Васильович, Філяк Михайло Йосипович
МПК: B66C 1/62
Мітки: захоплюючий, пристрій
Формула / Реферат:
1. Захоплюючий пристрій, що містить верхню скобу і циліндричний корпус, який відрізняється тим, що в нижній відносно скоби частині корпус виконаний з наскрізним пазом, нахиленим до осі корпусу з верхнім розташуванням входу в паз, вхід в паз перекритий С-подібною нахиленою касетою з розташуванням входу в касету на стику з пазом, просвіт С-подібної касети в профіль відповідає просвіту паза, в якому в поперечній до осі корпусу площині вільно...
Самовідчіпний захоплюючий пристрій
Номер патенту: 24767
Опубліковано: 10.07.2007
Автор: Боратинський Олег Володимирович
МПК: B66C 1/22
Мітки: самовідчіпний, пристрій, захоплюючий
Формула / Реферат:
Самовідчіпний захоплюючий пристрій, який містить корпус з вирізом, шарнірно встановлену вантажозахоплюючу скобу, вушко для під'єднання до вантажопідіймального механізму з можливістю зворотно-поступального руху, поворотний фіксатор у вигляді двоплечого важеля, одне плече якого взаємодіє з носком скоби, пружину, який відрізняється тим, що, з метою підвищення надійності в роботі, вантажозахоплююча скоба змонтована на підпружиненому штоці, в пазі...
Захоплюючий пристрій маніпулятора
Номер патенту: 68761
Опубліковано: 10.04.2012
Автори: Кузнєцов Юрій Миколайович, Фоменкова Анастасія Олексіївна, Резенчук Олена Євгенівна
МПК: B25J 15/00
Мітки: захоплюючий, пристрій, маніпулятора
Формула / Реферат:
Захоплюючий пристрій маніпулятора, що містить циліндричний пустотілий корпус, упорну гайку, трубку, порожнина якої має можливість зв'язуватись з джерелом живлення робочого середовища, який відрізняється тим, що трубка виконана у вигляді гвинтової спіралі з неметалевого матеріалу поверх циліндричного пустотілого корпуса, завальцьований кінець трубки розміщений всередині упорної гайки, що виконана з неметалевого матеріалу, а відкритий прямий...
Попередній патент: Автомобіль
Наступний патент: Нагрівач преформ
Випадковий патент: Пристрій для нанесення ворсованого покриття