Спосіб дистанційного знімання об’єктів
Номер патенту: 103833
Опубліковано: 25.11.2013
Автори: Беленок Вадим Юрійович, Шульц Роман Володимирович, Бурачек Всеволод Германович
Формула / Реферат
Спосіб дистанційного знімання об'єктів, заснований на скануванні зображення об'єктів на матричному фотоприймачі цифрової знімальної камери, який відрізняється тим, що при скануванні зображення об'єктів в одному напрямку осі фотоприймальної матриці зазначеної камери орієнтують під кутом 45° до напрямку переміщення зображення об'єктів, отримані при скануванні зображення об'єктів попіксельно перетворюють в електричні сигнали, розкладають отримані зображення на елементи, виконують ранжування елементів зображення об'єктів і визначать моменти перетинання ними ліній поділу пікселів, паралельних напрямкам двох осей фотоприймальної матриці, потім за цими даними визначають координати елементів зображення в системі координат фотоприймальної матриці та формують цифровий план об'єктів знімання.
Текст
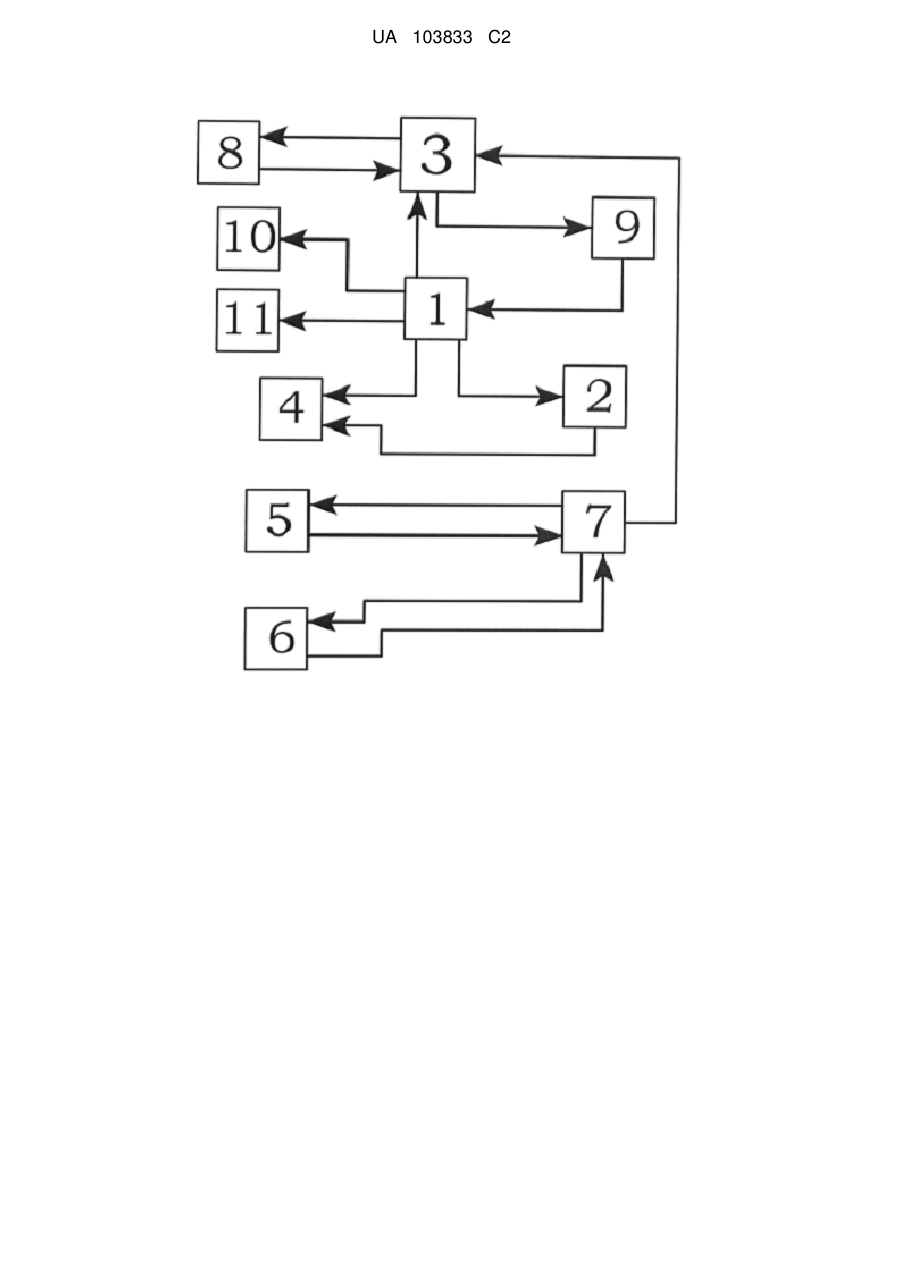
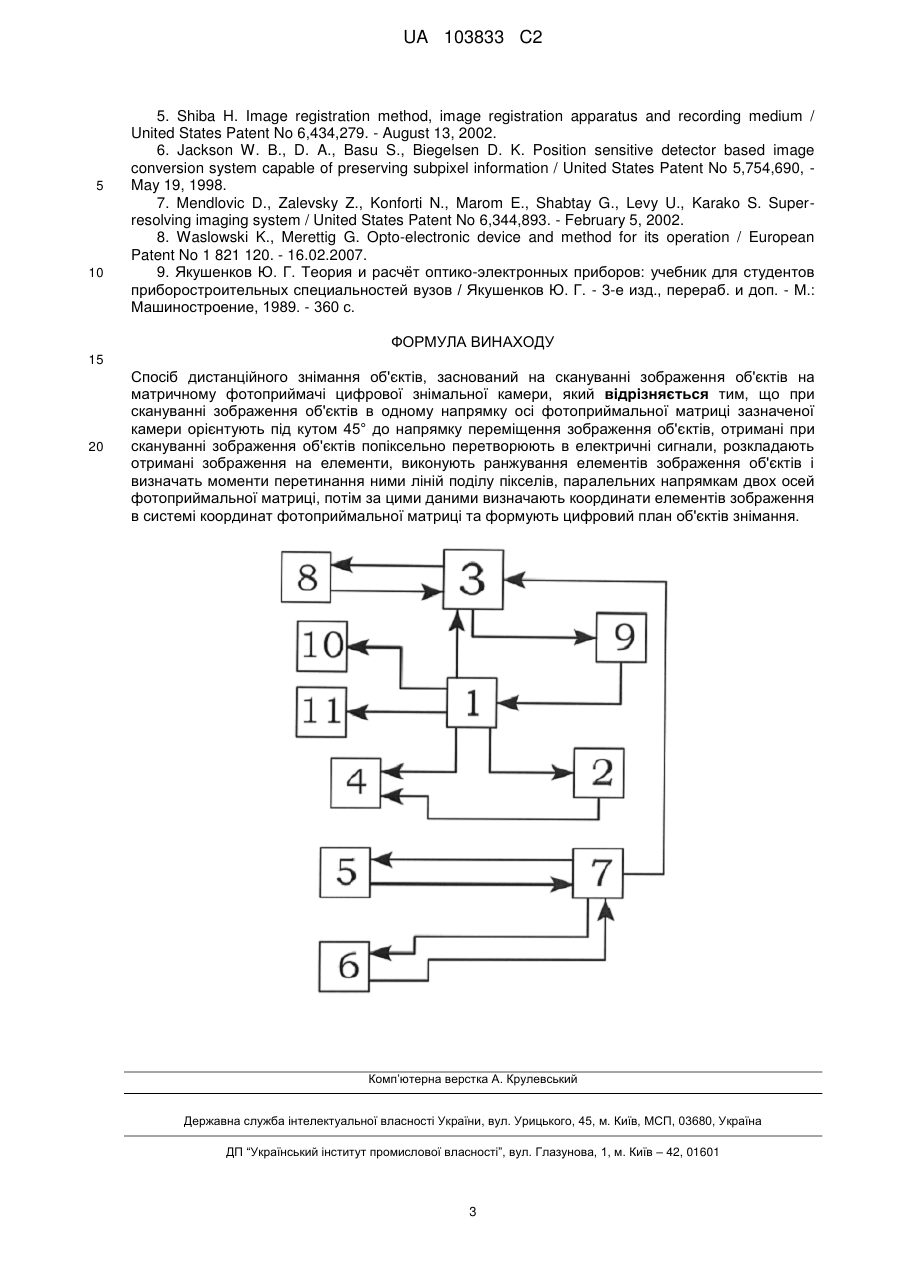
Реферат: Винахід належить до області аерокосмічних знімань та дешифрування. Спосіб дистанційного знімання об'єктів заснований на скануванні зображення об'єктів на матричному фотоприймачі цифрової знімальної камери. Згідно з винаходом, при скануванні зображення об'єктів в одному напрямку осі фотоприймальної матриці зазначеної камери орієнтують під кутом 45° до напрямку переміщення зображення об'єктів. Отримані при скануванні зображення об'єктів попіксельно перетворюють в електричні сигнали, розкладають отримані зображення на елементи, виконують ранжування елементів зображення об'єктів і визначать моменти перетинання ними ліній поділу пікселів, паралельних напрямкам двох осей фотоприймальної матриці. Потім за отриманими даними визначають координати елементів зображення в системі координат фотоприймальної матриці та формують цифровий план об'єктів знімання. Спосіб дозволяє здійснити знімання об'єктів у плані з координатами X, Y при скануванні об'єктів в одному напрямку, що підвищує розрізнювальну здатність знімальної системи. UA 103833 C2 (12) UA 103833 C2 UA 103833 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до області аерокосмічних знімань та дешифрування. Відомий ряд способів цифрового аерофотознімання: - способи сканування місцевості з космосу цифровими знімальними системами [1]; - сканерний спосіб цифрового аерофотознімання з літака системою ADS40 (Airborne Digital Sensor), камера якої має три панхроматичні лінійки, скеровані у напрямках "вперед" (28° від надиру), "назад" (42° від надиру) та "у надир" [2, 3]; - способи цифрового аерофотознімання з покадровим скануванням місцевості, описаний у роботах [3, 4]. Недоліком першого способу є мале поле зору і низька розрізненість. При реалізації другого способу застосовуються прилади з зарядовим зв'язком (ПЗЗ) у вигляді лінійки, а для формування зображення застосовується принцип дії електрооптичного сканера. У системі розміщено одну біля одної дві лінійки, зміщені на півпікселя, що підвищує розрізненість удвічі, у надирному напрямку "працюють" ще чотири ПЗЗ-лінійки (у червоному, зеленому, блакитному та інфрачервоному спектральних діапазонах). Особливістю сканерного зображення є те, що воно формується зі смуг і кожна смуга має свій миттєвий центр проекції, а через те, що літак переміщується, суцільне зображення є деформованим. Недоліком третього способу є мале поле зору цифрової камери. Для усунення вказаних недоліків застосовуються різноманітні способи одержання зображень субпіксельної розрізненості. Так, відомий спосіб та пристрій для реєстрації зображень [5], в якому забезпечується субпіксельна реєстрація країв на зображенні шляхом врахування відхилень розподілу яскравості від унімодального. Недоліком цього способу є відсутність фізичного вимірювання субпіксельних сигналів, тобто він є різновидом інтерполяції. Також відомий спосіб, що реалізується пристроєм для одержання зображень з реєстрацією субпіксельної інформації [6], в якому визначаються інтенсивності сигналів та центроїди місцерозташування сигналів в межах кожного пікселя. Недоліком цього пристрою є висока складність конструкції: кожний фотоприймальний елемент матриці обладнується декількома додатковими вимірювальними електродами та передпідсилювачами сигналів. Ще відомий спосіб, що реалізується пристроєм для одержання зображень із надрозрізненістю [7], в якому субпіксельний сигнал формується за допомогою додаткових дифракційних елементів з мікролінзами в кожному пікселі. Недоліком цього пристрою також є висока складність конструкції. Найбільш близьким технічним рішенням, що прийняте за прототип, є оптико-електронний пристрій та спосіб його функціонування, в якому здійснюється субпіксельний зсув зображення за рахунок додаткової оптичної системи [8]. Спільними ознаками для прототипу і заявленого способу є виконання покадрового знімання та застосування багатоелементної фотоприймальної матриці як приймача випромінювання. Недоліком відомого способу-прототипу є обмеження кількості розрізнювальних субпікселів кількістю додаткових оптичних систем, що обмежує значне підвищення розрізнювальної здатності знімальної системи. Задачею винаходу є створення способу дистанційного знімання об'єктів, який забезпечує побудову цифрового плану об'єктів місцевості в системі координат фотоприймальної матриці (XM, YM) при скануванні зображення по одній осі (наприклад, ХM +45°), що підвищує розрізнювальну здатність знімальної системи. Поставлена задача вирішується тим, що в способі дистанційного знімання об'єктів, заснованому на скануванні зображення на матричному фотоприймачі цифрової знімальної камери, згідно з винаходом, при скануванні в одному напрямку осі матриці орієнтують під кутом 45° до напрямку переміщення зображення об'єктів, виконують ранжування елементів зображення об'єктів і визначать моменти перетинання ними ліній поділу пікселів, паралельних напрямкам двох осей фотоприймальної матриці, потім за цими даними визначають координати елементів зображення в системі координат фотоприймальної матриці та формують цифровий план об'єктів знімання. Технічним результатом є формування цифрового плану при скануванні зображення об'єктів місцевості в одному напрямку. На кресленні представлена схема пристрою, за допомогою якого реалізується запропонований спосіб, на якій відповідними цифрами позначено: 1 - блок керування; 2 - оптико-електронна цифрова знімальна камера; 3 - електронний блок обробки інформації; 1 UA 103833 C2 5 10 15 20 25 30 35 40 45 50 55 4 - блок ранжування елементів зображення об'єктів місцевості; 5 - блок вимірювання різниці освітленості елементів зображення при перетині зображенням лінії поділу пікселів, паралельної осі фотоприймальної матриці ХM; 6 - блок вимірювання різниці освітленості елементів зображення при перетині зображенням лінії поділу пікселів, паралельної осі фотоприймальної матриці YM; 7 - блок визначення моментів перетинання зображеннями елементів об'єктів ліній поділу пікселів, паралельних осям ХM і YM; 8 - навігаційний блок; 9 - блок формування цифрового плану об'єктів місцевості; 10 - блок запису та збереження інформації; 11 - блок передачі інформації. Всі блоки розташовані на борту носія (літака, гвинтокрила та ін.), цифрова камера 2 встановлена в системі осей, що забезпечують її задане положення відносно вертикалі та в плані, при цьому осі фотоприймальної матриці камери 2 повернуті в горизонтальній площині відносно поздовжньої осі носія (напрямку руху) на кут 45° (тобто напрямок сканування є Хм +45°). Лінією курсу є вісь X геодезичної системи координат. Стандартний навігаційний блок містить гіроазимут, гірогоризонт, датчики вертикалі, висоти, швидкості, приймач GPS та інші навігаційні прилади. Робота пристрою за запропонованим способом полягає в наступному. Блок 1 включає всі інші блоки пристрою та керує їх роботою. Камера 2 перетворює отримані при зніманні зображення об'єктів в електричні сигнали попіксельно та передає цю інформацію до блока 4. У блоці 4 відбувається розкладання зображення на елементи та ранжування елементів за розміром, освітленістю, формою. Поточні координати ранжованих елементів відслідковуються блоком 7, при цьому до блоків 5 і 6 надходить інформація про прогнозовані моменти вимірів з попередженням. У блоках 5 і 6 виконується вимірювання рівня та порівняння електричних сигналів від пікселів по обидва боки від граничних ліній стовпців (у блоці 5) і рядків (у блоці 6) і визначаються моменти рівних сигналів при проходженні кожним елементом робочої зони (n границь по осі ХM і m границь по осі YM). Отримана інформація з блоків 5 і 6 передається до блока 7, в якому обчислюються середні значення моментів проходження центрів зображень елементів через лінії границь стовпців і рядків паралельно, відповідно, до осей ХM і YM матриці з врахуванням швидкості переміщення зображення і з приведенням даних до заданої експозиції та визначення координат ХM і YM. З блока 7 сигнали, що містять координати об'єктів у системі матриці (XM; YM), передаються до блока 3, де виконується перетворення координат елементів із системи (XM; YM) у задану систему координат з врахуванням даних, що передаються блоком 8 і визначають орієнтування носія в геодезичній системі координат (X; Y). З блока 3 інформація про координати елементів зображення надходить до блока 9, в якому формується цифровий план у системі (X; Y). При цьому, інформація з блока 9 щодо формування плану для і-го кадру маршруту передається до блока 1, звідки надходить команда до блока 10 про запис цифрового плану і до блока 11 про передачу цифрового плану на наземну станцію. Якщо осі системи (XM; YM) повернуті відносно осей (X; Y) на 45° у додатному напрямку (проти ходу стрілки годинника), то координати об'єкта трансформуються відомим чином: X X A 1 M , Y Y M sin 45 - матриця направляючих косинусів. де A cos 45 sin 45 cos 45 Таким чином, запропонований спосіб дозволяє здійснити знімання об'єктів у плані з координатами (X; Y) при скануванні об'єктів в одному напрямку (наприклад, за рахунок переміщення носія). Джерела інформації: 1. Савиных В. П. Геоинформационный анализ данных дистанционного зондирования / В. П. Савиных, В. Я. Цветков. - М.: Картгеоцентр-Геодезиздат, 2001. - 228 с. 2. LH System ADS 40, XIX ISPRS Congress Amsterdam, July, 2000. 3. Дорожинський О. Л. Фотограмметрія: підручник/ О. Л. Дорожинський, Р. Тукай. - Львів: Видавництво Національного університету "Львівська політехніка", 2008. - 332 с. 4. Патент на винахід № 79505, Україна, G02B 13/08, G03B 37/00. Спосіб цифрового аерофотознімання - Бурачек В. Г., Железняк О. О., Крельштейн П. Д., Надточій О. В., Шульц Р. В. - Від 25.06.2007, Бюл. № 9, 2007 р. 2 UA 103833 C2 5 10 5. Shiba H. Image registration method, image registration apparatus and recording medium / United States Patent No 6,434,279. - August 13, 2002. 6. Jackson W. В., D. A., Basu S., Biegelsen D. K. Position sensitive detector based image conversion system capable of preserving subpixel information / United States Patent No 5,754,690, May 19, 1998. 7. Mendlovic D., Zalevsky Z., Konforti N., Marom E., Shabtay G., Levy U., Karako S. Superresolving imaging system / United States Patent No 6,344,893. - February 5, 2002. 8. Waslowski K., Merettig G. Opto-electronic device and method for its operation / European Patent No 1 821 120. - 16.02.2007. 9. Якушенков Ю. Г. Теория и расчёт оптико-электронных приборов: учебник для студентов приборостроительных специальностей вузов / Якушенков Ю. Г. - 3-е изд., перераб. и доп. - М.: Машиностроение, 1989. - 360 с. ФОРМУЛА ВИНАХОДУ 15 20 Спосіб дистанційного знімання об'єктів, заснований на скануванні зображення об'єктів на матричному фотоприймачі цифрової знімальної камери, який відрізняється тим, що при скануванні зображення об'єктів в одному напрямку осі фотоприймальної матриці зазначеної камери орієнтують під кутом 45° до напрямку переміщення зображення об'єктів, отримані при скануванні зображення об'єктів попіксельно перетворюють в електричні сигнали, розкладають отримані зображення на елементи, виконують ранжування елементів зображення об'єктів і визначать моменти перетинання ними ліній поділу пікселів, паралельних напрямкам двох осей фотоприймальної матриці, потім за цими даними визначають координати елементів зображення в системі координат фотоприймальної матриці та формують цифровий план об'єктів знімання. Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюBelenok Vadym Yuriiovych, Burachek Vsevolod Hermanovych, Shults Roman Volodymyrovych
Автори російськоюБеленок Вадим Юрьевич, Бурачек Всеволод Германович, Шульц Роман Владимирович
МПК / Мітки
МПК: G01C 11/00
Мітки: знімання, дистанційного, об'єктів, спосіб
Код посилання
<a href="https://ua.patents.su/5-103833-sposib-distancijjnogo-znimannya-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб дистанційного знімання об’єктів</a>
Спосіб дистанційного знімання місцевості
Номер патенту: 49406
Опубліковано: 26.04.2010
Автори: Зацерковний Віталій Іванович, Бурачек Всеволод Германович, Беленок Вадим Юрійович, Параніч Віктор Петрович, Мороз Валерій Миколайович
МПК: G01C 11/00
Мітки: дистанційного, спосіб, знімання, місцевості
Формула / Реферат:
Спосіб дистанційного знімання місцевості, що заснований на методі цифрової зйомки плану місцевості та методі лазерного висотометрування, який відрізняється тим, що одночасно з експозиціями цифрової знімальної камери вимірюють за допомогою лазерного висотоміра висоти точок на плані, що знімають цифровою камерою, при цьому лазерний промінь висотоміра пропускають крізь двоклинову оптичну систему та виконують обертання клинів в одному напрямку з...
Спосіб та пристрій для дистанційного знімання місцевості
Номер патенту: 94163
Опубліковано: 11.04.2011
Автори: Параніч Віктор Петрович, Зацерковний Віталій Іванович, Беленок Вадим Юрійович, Бурачек Всеволод Германович, Мороз Валерій Миколайович
МПК: G01C 11/02
Мітки: спосіб, знімання, дистанційного, місцевості, пристрій
Формула / Реферат:
1. Спосіб дистанційного знімання місцевості, що заснований на методі цифрової зйомки плану місцевості та методі лазерного висотометрування, який відрізняється тим, що одночасно з експозиціями цифрової знімальної камери вимірюють за допомогою лазерного висотоміра висоти точок на плані, що знімають цифровою камерою, лазерний промінь висотоміра пропускають крізь двоклинову оптичну систему та виконують обертання клинів в одному напрямі з різними...
Оптико-електронний сканувальний пристрій для дистанційного знімання
Номер патенту: 95143
Опубліковано: 11.07.2011
Автори: Пономаренко Сергій Олексійович, Станкевич Сергій Арсенійович, Федотов Борис Микитович
МПК: H04N 7/22, H01L 27/148, G01C 11/18
Мітки: сканувальний, оптико-електронний, знімання, дистанційного, пристрій
Формула / Реферат:
Оптико-електронний сканувальний пристрій для дистанційного знімання, що містить оптичну систему, декілька лінійок або матрицю фотоприймальних елементів, регістри виводу, рядковий буфер, накопичувач сигналів зображення, схему керування і тактовий генератор, який відрізняється тим, що додатково містить суматори, кількість яких дорівнює кількості лінійок або рядків в матриці фотоприймальних елементів, входи яких підключені до виходів регістрів...
Спосіб дистанційного знімання даних
Номер патенту: 39546
Опубліковано: 25.02.2009
Автори: Коломейко Анатолій Вікторович, Шостак Олександр Тихонович, Шацман Леонід Георгійович, Волощук Ігор Вікторович, Нікітін Микола Михайлович
МПК: G01L 11/00, G01N 29/00
Мітки: знімання, дистанційного, спосіб, даних
Формула / Реферат:
1. Спосіб дистанційного знімання даних, при якому проводять підготовку чутливого елемента шляхом розміщення перетворювача поверхневих акустичних хвиль і відбивачів поверхневих акустичних хвиль на акустичному звукопроводі, формують за кількістю відбивачів поверхневих акустичних хвиль кількість акустичних трактів, встановлюють чутливий елемент, що містить акустичний звукопровід з розміщеними на ньому перетворювачем поверхневих акустичних хвиль...
Спосіб аерокосмічного знімання лінійних об’єктів
Номер патенту: 97888
Опубліковано: 26.03.2012
Автори: Станкевич Сергій Арсенійович, Бурачек Всеволод Германович, Нисторяк Іван Олександрович, Попов Михайло Олексійович, Зацерковний Віталій Іванович, Беленок Вадим Юрійович
МПК: G01C 11/02
Мітки: аерокосмічного, спосіб, лінійних, об'єктів, знімання
Формула / Реферат:
Спосіб аерокосмічного знімання лінійних об'єктів, заснований на субпіксельній технології, який відрізняється тим, що фотоприймальну матрицю оптико-електронного знімального приладу повертають навколо оптичної осі приладу, при цьому вимірюють величину кута повороту, а при формуванні цифрового плану за величиною електричних сигналів від засвічування пікселів вздовж границь лінійного об'єкта визначають точні межі та ширину об'єкта і враховують...
Попередній патент: Спосіб визначення молекулярного йоду у воді
Наступний патент: Капсульований білоквмісний продукт та спосіб його одержання
Випадковий патент: Інгібітори взаємодії між mdm2 та p53