Пружна опора
Номер патенту: 103840
Опубліковано: 25.11.2013
Автори: Сидоренко Ігор Іванович, Ткачов Анатолій Вікторович, Ткачьов Олексій Анатолійович

Формула / Реферат
Пружна опора, яка містить рухому і нерухому платформи, які з'єднані з можливістю переміщення одна відносно іншої вздовж напрямних, закріплених на нерухомій платформі, між якими для утворення зведеного пружного зв'язку встановлено циліндричні пружини стискання, один кінець яких закріплений на рухомій платформі, осі яких розташовані під деяким кутом до головної осі опори, яка відрізняється тим, що введено щонайменше один важіль та щонайменше один повзун з його власною напрямною, при цьому: один кінець важеля закріплено на рухомій платформі, а інший на повзуні, з яким з'єднано інший кінець пружини стискання; а сам повзун встановлено з можливістю переміщення на власній напрямній, закріпленій на нерухомій платформі, при цьому важелем і повзуном утворена система управління кутом нахилу осі пружини стискання відносно головної осі опори у вигляді шарнірно-важільного механізму.
Текст
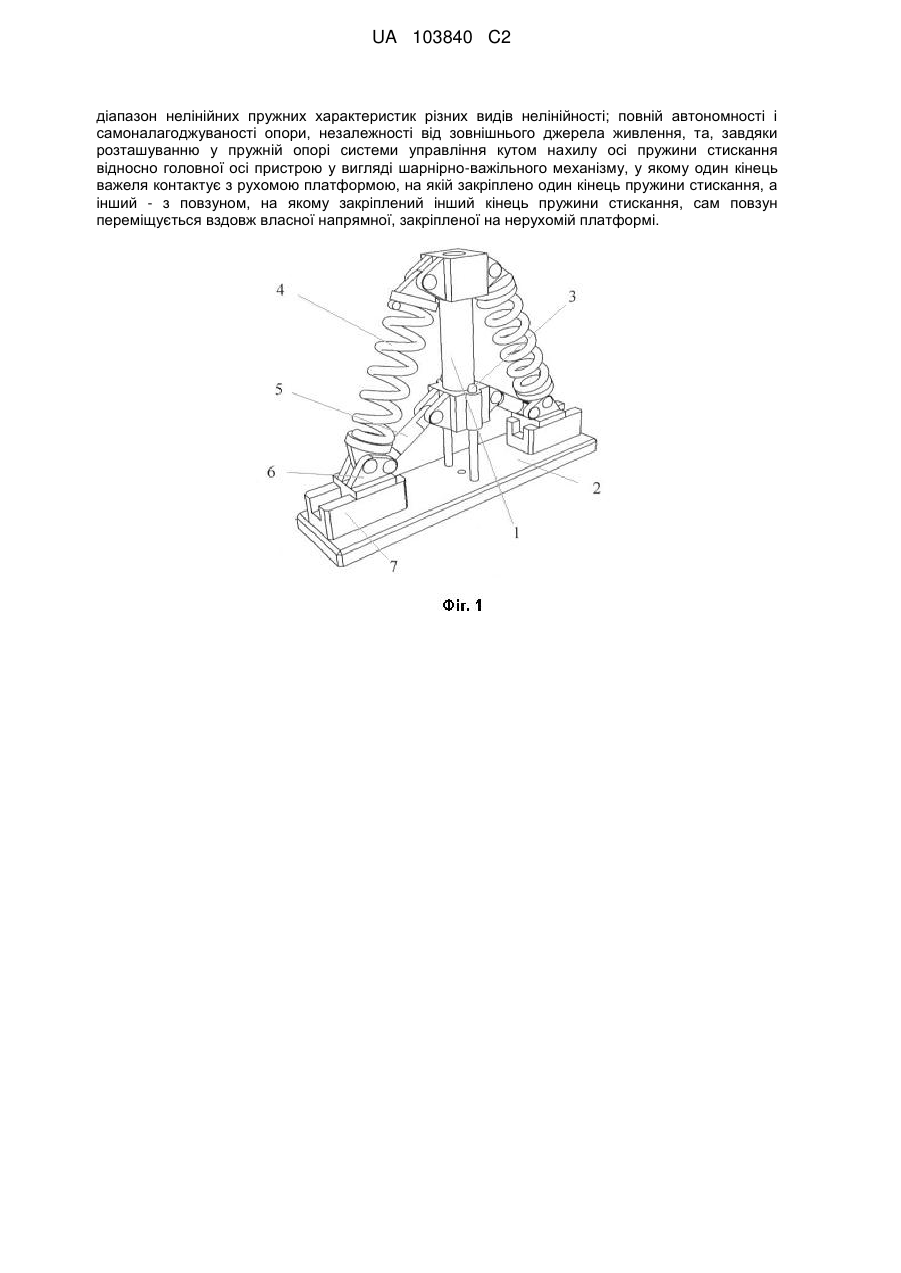
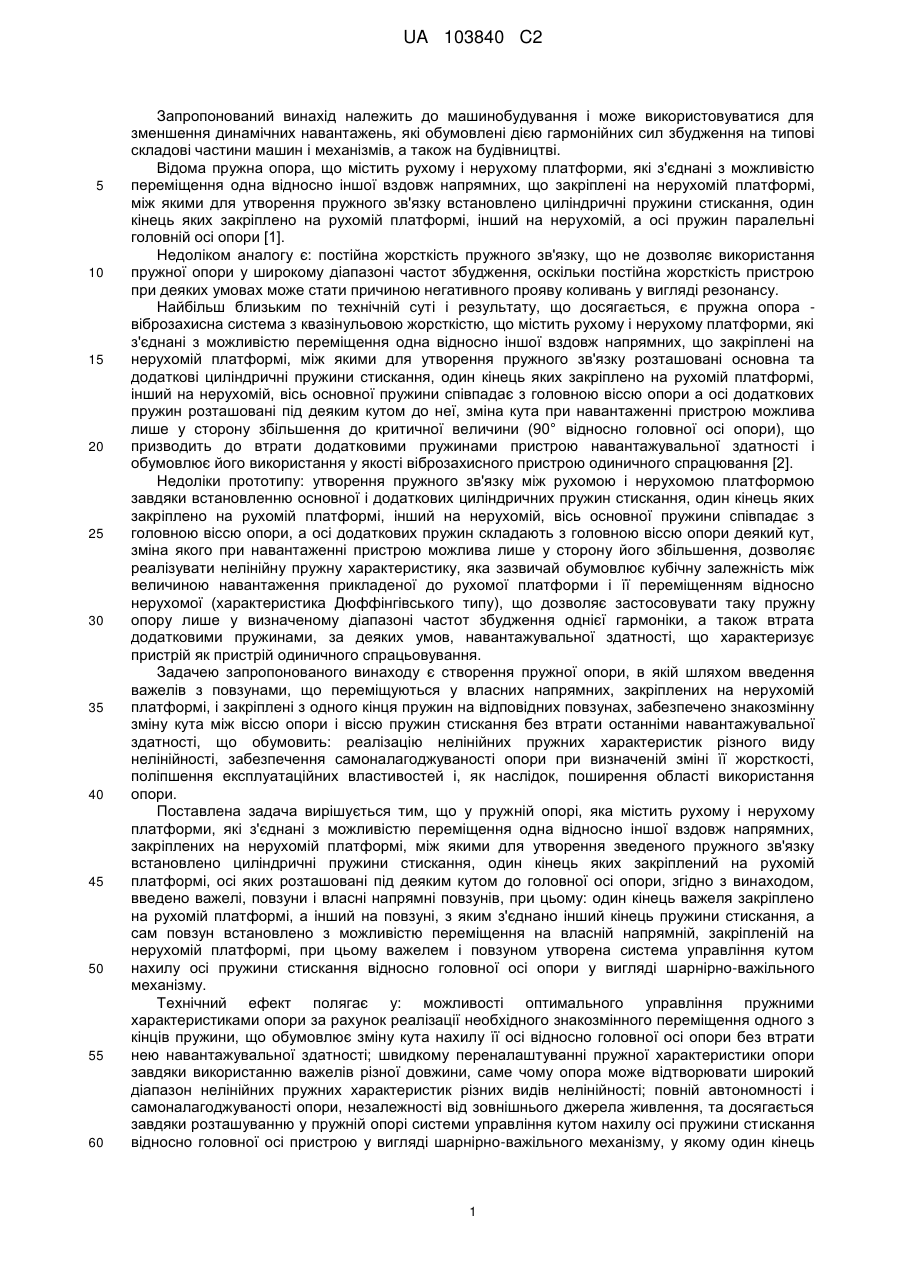
Реферат: Винахід належить до машинобудування і може використовуватися для зменшення динамічних навантажень, які обумовлені дією гармонійних сил збудження на типові складові частини машин і механізмів, а також на будівництві. У пружну опору, яка містить рухому і нерухому платформи, які з'єднані з можливістю переміщення одна відносно іншої вздовж напрямних, закріплених на нерухомій платформі, між якими для утворення зведеного пружного зв'язку встановлено циліндричні пружини стискання, один кінець яких закріплений на рухомій платформі, осі яких розташовані під деяким кутом до головної осі опори, згідно з винаходом введено важелі, повзуни і власні напрямні повзунів. При цьому: один кінець важеля закріплено на рухомій платформі, а інший - на повзуні, з яким з'єднано інший кінець пружини стискання, а сам повзун встановлено з можливістю переміщення на власній напрямній, закріпленій на нерухомій платформі, при цьому важелем і повзуном утворена система управління кутом нахилу осі пружини стискання відносно головної осі опори у вигляді шарнірно-важільного механізму. Досягається можливість оптимального управління пружними характеристиками опори за рахунок реалізації необхідного знакозмінного переміщення одного з кінців пружини, що обумовлює зміну кута нахилу її осі відносно головної осі опори без втрати нею навантажувальної здатності; швидкому переналаштуванні пружної характеристики опори завдяки використанню важелів різної довжини, саме тому опора може відтворювати широкий UA 103840 C2 (12) UA 103840 C2 діапазон нелінійних пружних характеристик різних видів нелінійності; повній автономності і самоналагоджуваності опори, незалежності від зовнішнього джерела живлення, та, завдяки розташуванню у пружній опорі системи управління кутом нахилу осі пружини стискання відносно головної осі пристрою у вигляді шарнірно-важільного механізму, у якому один кінець важеля контактує з рухомою платформою, на якій закріплено один кінець пружини стискання, а інший - з повзуном, на якому закріплений інший кінець пружини стискання, сам повзун переміщується вздовж власної напрямної, закріпленої на нерухомій платформі. UA 103840 C2 5 10 15 20 25 30 35 40 45 50 55 60 Запропонований винахід належить до машинобудування і може використовуватися для зменшення динамічних навантажень, які обумовлені дією гармонійних сил збудження на типові складові частини машин і механізмів, а також на будівництві. Відома пружна опора, що містить рухому і нерухому платформи, які з'єднані з можливістю переміщення одна відносно іншої вздовж напрямних, що закріплені на нерухомій платформі, між якими для утворення пружного зв'язку встановлено циліндричні пружини стискання, один кінець яких закріплено на рухомій платформі, інший на нерухомій, а осі пружин паралельні головній осі опори [1]. Недоліком аналогу є: постійна жорсткість пружного зв'язку, що не дозволяє використання пружної опори у широкому діапазоні частот збудження, оскільки постійна жорсткість пристрою при деяких умовах може стати причиною негативного прояву коливань у вигляді резонансу. Найбільш близьким по технічній суті і результату, що досягається, є пружна опора віброзахисна система з квазінульовою жорсткістю, що містить рухому і нерухому платформи, які з'єднані з можливістю переміщення одна відносно іншої вздовж напрямних, що закріплені на нерухомій платформі, між якими для утворення пружного зв'язку розташовані основна та додаткові циліндричні пружини стискання, один кінець яких закріплено на рухомій платформі, інший на нерухомій, вісь основної пружини співпадає з головною віссю опори а осі додаткових пружин розташовані під деяким кутом до неї, зміна кута при навантаженні пристрою можлива лише у сторону збільшення до критичної величини (90° відносно головної осі опори), що призводить до втрати додатковими пружинами пристрою навантажувальної здатності і обумовлює його використання у якості віброзахисного пристрою одиничного спрацювання [2]. Недоліки прототипу: утворення пружного зв'язку між рухомою і нерухомою платформою завдяки встановленню основної і додаткових циліндричних пружин стискання, один кінець яких закріплено на рухомій платформі, інший на нерухомій, вісь основної пружини співпадає з головною віссю опори, а осі додаткових пружин складають з головною віссю опори деякий кут, зміна якого при навантаженні пристрою можлива лише у сторону його збільшення, дозволяє реалізувати нелінійну пружну характеристику, яка зазвичай обумовлює кубічну залежність між величиною навантаження прикладеної до рухомої платформи і її переміщенням відносно нерухомої (характеристика Дюффінгівського типу), що дозволяє застосовувати таку пружну опору лише у визначеному діапазоні частот збудження однієї гармоніки, а також втрата додатковими пружинами, за деяких умов, навантажувальної здатності, що характеризує пристрій як пристрій одиничного спрацьовування. Задачею запропонованого винаходу є створення пружної опори, в якій шляхом введення важелів з повзунами, що переміщуються у власних напрямних, закріплених на нерухомій платформі, і закріплені з одного кінця пружин на відповідних повзунах, забезпечено знакозмінну зміну кута між віссю опори і віссю пружин стискання без втрати останніми навантажувальної здатності, що обумовить: реалізацію нелінійних пружних характеристик різного виду нелінійності, забезпечення самоналагоджуваності опори при визначеній зміні її жорсткості, поліпшення експлуатаційних властивостей і, як наслідок, поширення області використання опори. Поставлена задача вирішується тим, що у пружній опорі, яка містить рухому і нерухому платформи, які з'єднані з можливістю переміщення одна відносно іншої вздовж напрямних, закріплених на нерухомій платформі, між якими для утворення зведеного пружного зв'язку встановлено циліндричні пружини стискання, один кінець яких закріплений на рухомій платформі, осі яких розташовані під деяким кутом до головної осі опори, згідно з винаходом, введено важелі, повзуни і власні напрямні повзунів, при цьому: один кінець важеля закріплено на рухомій платформі, а інший на повзуні, з яким з'єднано інший кінець пружини стискання, а сам повзун встановлено з можливістю переміщення на власній напрямній, закріпленій на нерухомій платформі, при цьому важелем і повзуном утворена система управління кутом нахилу осі пружини стискання відносно головної осі опори у вигляді шарнірно-важільного механізму. Технічний ефект полягає у: можливості оптимального управління пружними характеристиками опори за рахунок реалізації необхідного знакозмінного переміщення одного з кінців пружини, що обумовлює зміну кута нахилу її осі відносно головної осі опори без втрати нею навантажувальної здатності; швидкому переналаштуванні пружної характеристики опори завдяки використанню важелів різної довжини, саме чому опора може відтворювати широкий діапазон нелінійних пружних характеристик різних видів нелінійності; повній автономності і самоналагоджуваності опори, незалежності від зовнішнього джерела живлення, та досягається завдяки розташуванню у пружній опорі системи управління кутом нахилу осі пружини стискання відносно головної осі пристрою у вигляді шарнірно-важільного механізму, у якому один кінець 1 UA 103840 C2 5 10 15 20 25 30 35 важеля контактує з рухомою платформою, на якій закріплено один кінець пружини стискання, а інший - з повзуном, на якому закріплений інший кінець пружини стискання, сам повзун переміщується вздовж власної напрямної, закріпленої на нерухомій платформі. Суть винаходу пояснюється кресленнями. На фіг. 1 зображений загальний вид пружної опори, яка містить рухому 1 і нерухому 2 платформи, які з'єднані з можливістю переміщення одна відносно іншої вздовж напрямних 3, між якими для утворення пружного зв'язку встановлено циліндричні пружини 4 стискання, осі яких складають з головною віссю опори деякий кут, один кінець важеля 5 і один кінець пружини стискання 4 закріплені на рухомій платформі 1 а інший кінець важеля закріплений на повзуні 6, на якому закріплений інший кінець пружини стискання 4, сам повзун встановлено з можливістю переміщення на власній напрямній 7, закріпленій на нерухомій платформі 2. Пружна опора працює наступним чином (Фіг. 2). Прикладання навантаження на рухому платформу 1 обумовлює її переміщення х відносно нерухомої платформи 2 вздовж напрямних 3 внаслідок деформації на ту ж саму величину пружного зв'язку, що складається з циліндричних витих пружин 4, осі яких складають з головною віссю опори деякий кут 0. Закріплення одного кінця важеля 5 на рухомій платформі 1, а іншого на повзуні 6 обумовлює переміщення повзуна і закріпленого на ньому одного кінця пружини стискання 4 на величину у(х) вздовж власної напрямної 7, закріпленої на нерухомій платформі 2. Враховуючи, що інший кінець циліндричної пружини стискання 4 закріплений на рухомій платформі, очевидно, що кут між осями пружин стискання і головною віссю опори у загальному випадку описується виразом: Σ(х) = 0 + (х) ± (у(х)), де (х) - геометрична зміна кута між головною віссю опори і осями пружин стискання 4, пов'язана з їх початковою орієнтацією і їх деформацією х у опорі; (у(х)) - знакозмінний кут між головною віссю опори і осями пружин стискання 4, зміна якого пов'язана з напрямком і величиною переміщення у(х) кінця пружини стискання, закріпленої на повзуні 6. Величина і знакозмінний напрямок переміщення у(х) кінця пружини стискання 4, закріпленої на повзуні 6, залежить від довжини використаного важеля 5 і величини і напрямку вертикального переміщення х пов'язаного з одним з його кінців рухомої платформи 1. Застосування запропонованого конструктивного рішення дозволить поліпшити експлуатаційні властивості пружної опори і розширити область її застосування, а також значно знизити динамічні навантаження, скоротити час і кількість циклів коливань механізмів у перехідних режимах роботи. Джерела інформації: 1. Заблонский К.И. Детали машин / К.И. Заблонский. - К.: Вища шк. головне изд-во, 1985. 518 с 2. Алабужев П.М. Виброзащитные системы с квазинулевой жесткостью / Алабужев П.М., Гритчин А.А., Ким И.И. - Л.: Машиностроение, 1986. - 96 с. ФОРМУЛА ВИНАХОДУ 40 45 50 Пружна опора, яка містить рухому і нерухому платформи, які з'єднані з можливістю переміщення одна відносно іншої вздовж напрямних, закріплених на нерухомій платформі, між якими для утворення зведеного пружного зв'язку встановлено циліндричні пружини стискання, один кінець яких закріплений на рухомій платформі, осі яких розташовані під деяким кутом до головної осі опори, яка відрізняється тим, що введено щонайменше один важіль та щонайменше один повзун з його власною напрямною, при цьому: один кінець важеля закріплено на рухомій платформі, а інший на повзуні, з яким з'єднано інший кінець пружини стискання; а сам повзун встановлено з можливістю переміщення на власній напрямній, закріпленій на нерухомій платформі, при цьому важелем і повзуном утворена система управління кутом нахилу осі пружини стискання відносно головної осі опори у вигляді шарнірноважільного механізму. 2 UA 103840 C2 Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F16F 1/22
Код посилання
<a href="https://ua.patents.su/5-103840-pruzhna-opora.html" target="_blank" rel="follow" title="База патентів України">Пружна опора</a>
Пружна опора

Номер патенту: 41553
Опубліковано: 15.12.2004
Автори: Можаровський Микола Мар'янович, Грабар Іван Григорович
МПК: F16C 27/00, F16C 35/04
Формула / Реферат:
Пружна опора, що складається з концентрично розташованих нерухомого з кришкою і рухомого корпусів з радіальними виступами і пружним елементом між ними, де пружний елемент виконаний у вигляді пакета розташованих в осьовому напрямку кілець, при цьому виступи рухомого корпусу мають ступінчастий профіль, яка відрізняється тим, що нерухомий корпус оснащений гідравлічним пристроєм, що складається з поршня і циліндра, виконаних у вигляді кільця і...
Пружна опора одномасового вібраційного конвеєра
Номер патенту: 29327
Опубліковано: 16.10.2000
Автор: Свистун Леонід Андрійович
МПК: B65G 27/00
Мітки: вібраційного, опора, одномасового, конвеєра, пружна
Формула / Реферат:
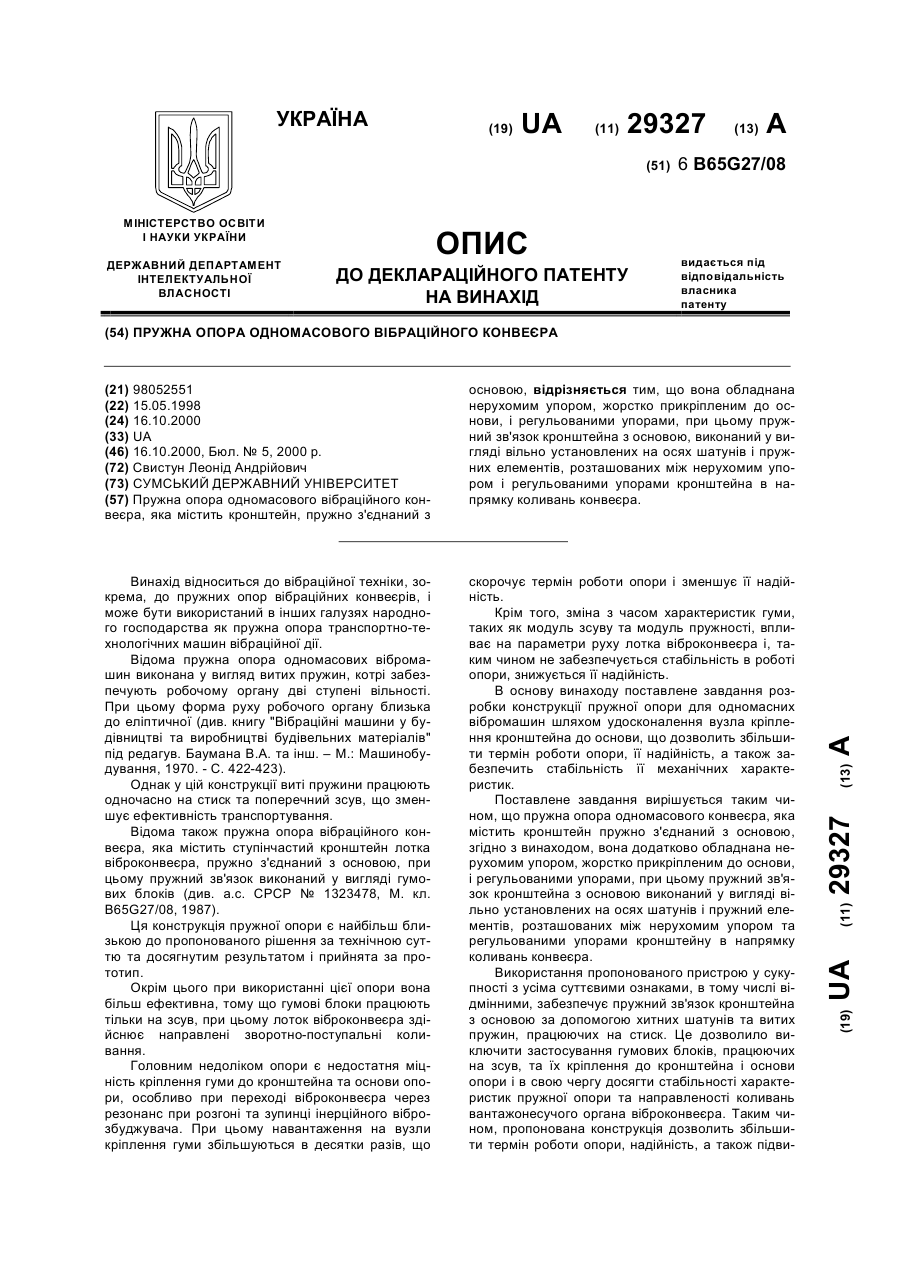
Пружна опора одномасового вібраційного конвеєра, яка містить кронштейн, пружно з'єднаний з основою, яка відрізняється тим, що вона обладнана нерухомим упором жорстко прикріпленим до основи, і регульованими упорами, при цьому пружний зв'язок кронштейна з основою виконаний у вигляді вільно установлених на осях шатунів і пружних елементів розташованих між нерухомим упором і регульованими упорами кронштейна в напрямку коливань конвеєра.
Пружна опора для вібраційних пристроїв
Номер патенту: 23325
Опубліковано: 25.05.2007
Автори: Нестеренко Микола Петрович, Скляренко Тарас Олександрович, Нестеренко Микола Миколайович
МПК: F16F 3/00
Мітки: опора, пружна, пристроїв, вібраційних
Формула / Реферат:
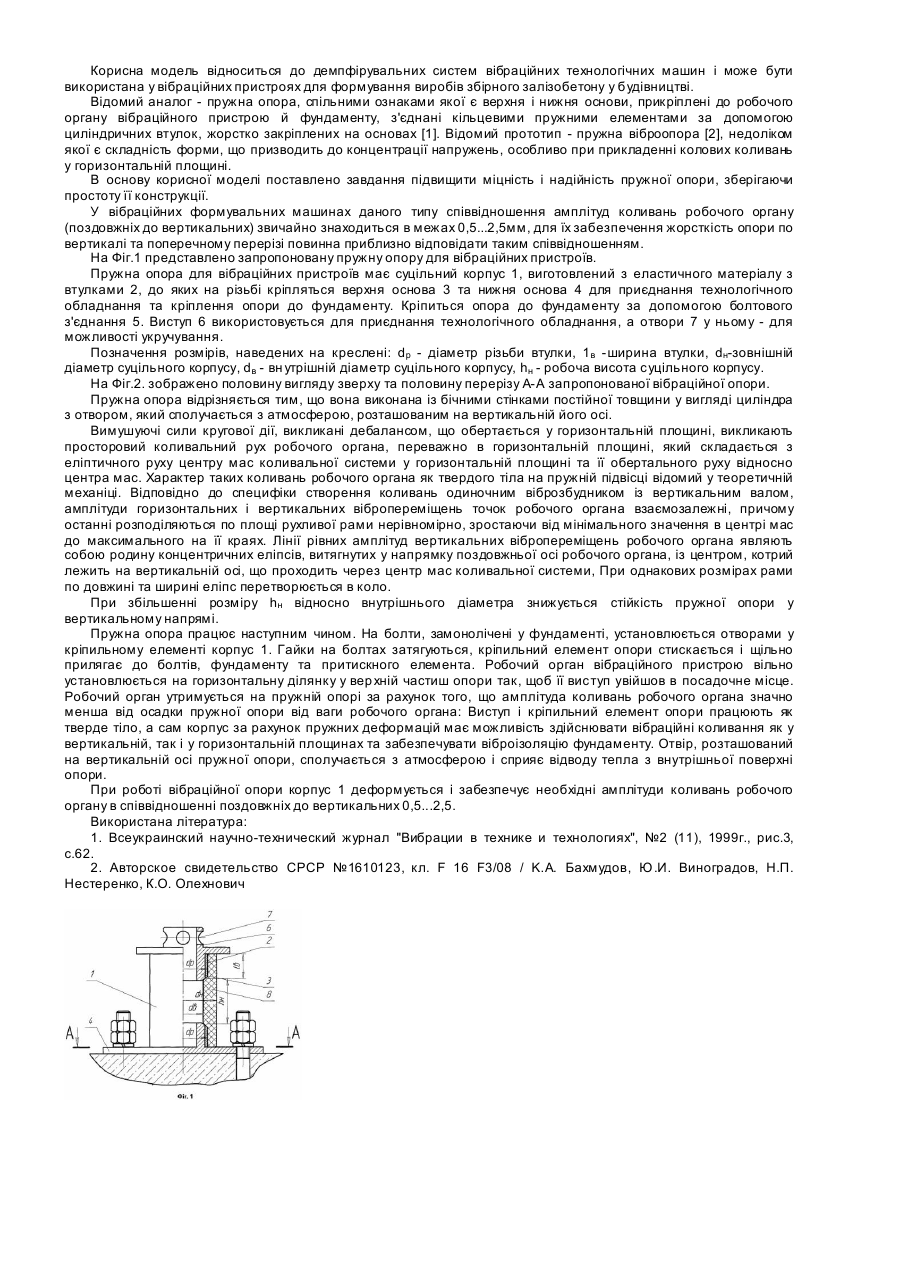
Пружна опора для вібраційних пристроїв, що містить суцільний корпус, виготовлений з еластичного матеріалу, з верхньою та нижньою основами для приєднання технологічного обладнання та кріплення опори до фундаменту, яка відрізняється тим, що виконана з бічними стінками постійної товщини у вигляді циліндра з отвором, що сполучається з атмосферою, розташованим на вертикальній його осі, через який здійснюють відведення тепла, причому співвідношення...
Пружна опора для підшипників роторних систем
Номер патенту: 89110
Опубліковано: 25.12.2009
Автори: Гайдамака Анатолій Володимирович, Гапонов Володимир Степанович
МПК: F16F 15/00, F16F 7/00, B23B 19/00, F16C 27/00, F16F 13/00
Мітки: підшипників, систем, опора, роторних, пружна
Формула / Реферат:
Пружна опора для підшипників роторних систем, що містить підшипник, корпус опори зі стопорним кільцем, елемент кінцевої жорсткості, обтискувальні кільця, основу з гвинтом, корпус роторної системи, яка відрізняється тим, що елемент кінцевої жорсткості складений з двох частин, між якими встановлені елементи квазінульової жорсткості.
Пружна опора для вібраційних пристроїв
Номер патенту: 68059
Опубліковано: 15.07.2004
Автори: Нестеренко Микола Петрович, Скляренко Тарас Олександрович, Нестеренко Микола Миколайович
МПК: F16F 3/00
Мітки: пристроїв, опора, пружна, вібраційних
Формула / Реферат:
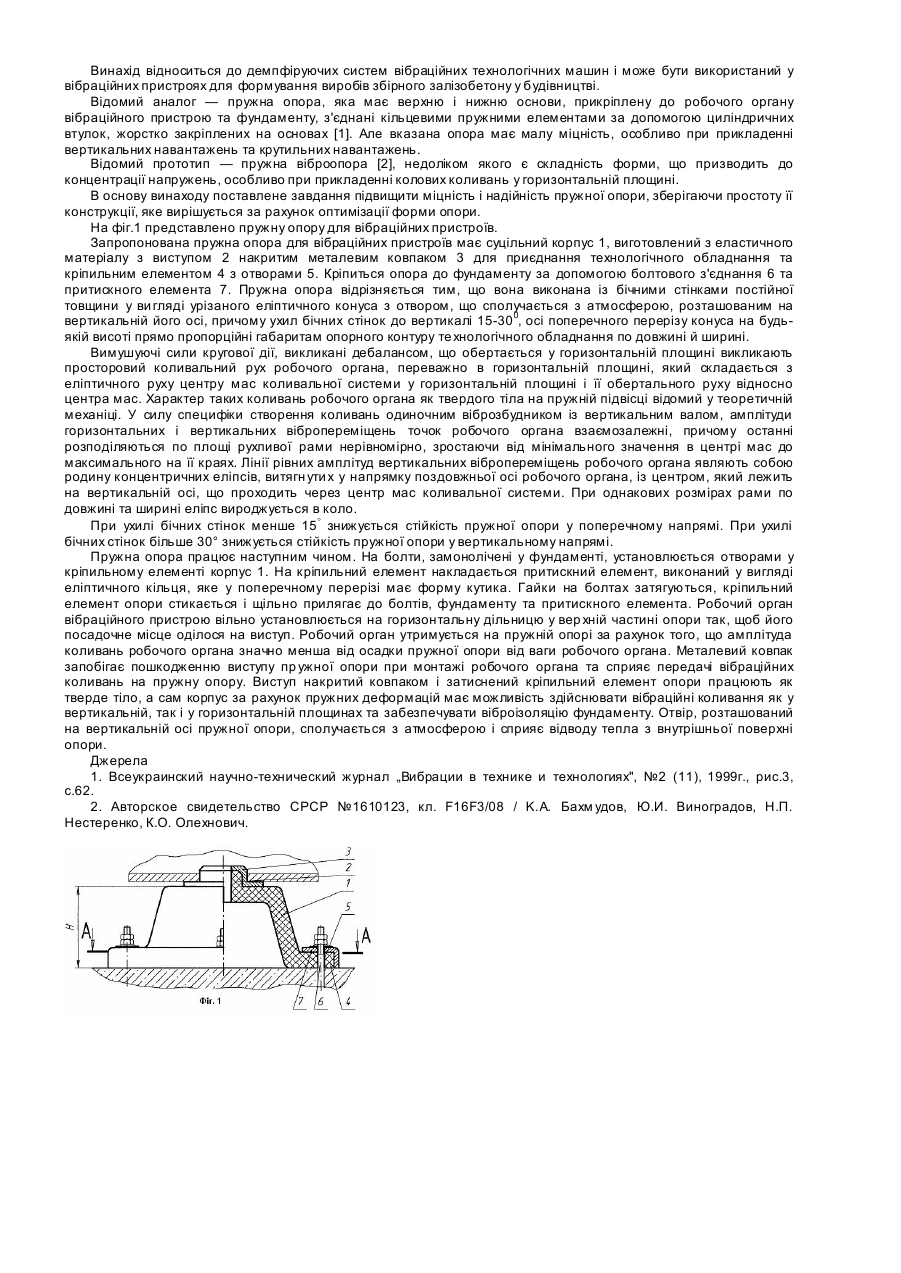
Пружна опора для вібраційних пристроїв, яка має суцільний корпус з виступом для приєднання технологічного обладнання, накритим металевим ковпаком та кріпильним елементом навколо основи конуса, яка відрізняється тим, що вона виконана із бічними стінками постійної товщини у вигляді зрізаного еліптичного конуса з отвором, що сполучається з атмосферою, розташованим на вертикальній його осі, причому ухил бічних стінок до вертикалі 15-30°, осі...
Попередній патент: Застосування одностінних вуглецевих нанотрубок в антигіпертензивній терапії
Наступний патент: Спосіб визначення мінеральної густини скелета гірської породи
Випадковий патент: Епоксидне зв'язуюче