Ультразвукова тростина-локатор для сліпих


Формула / Реферат
1. Ультразвукова тростина-локатор для сліпих людей, що містить блок живлення, блок формування сигналу керування (генератор сигналів), дві ультразвукові головки (приймальна й передавальна з робочою частотою 40 кГц), детектор, підсилювачі приймача та передавача, аналого-цифровий перетворювач, блок зберігання даних, головний телефон (випромінювач звуку), блок формування аудіосигналу, яка відрізняється тим, що в неї введені блок зв'язку з персональним комп'ютером по USB протоколу та блок керування чутливістю локатора.
2. Ультразвукова тростина-локатор за п. 1, яка відрізняється тим, що блок керування з чутливістю локатора виконаний у вигляді послідовно з'єднаних блока порогової обробки та блока керування.
Текст
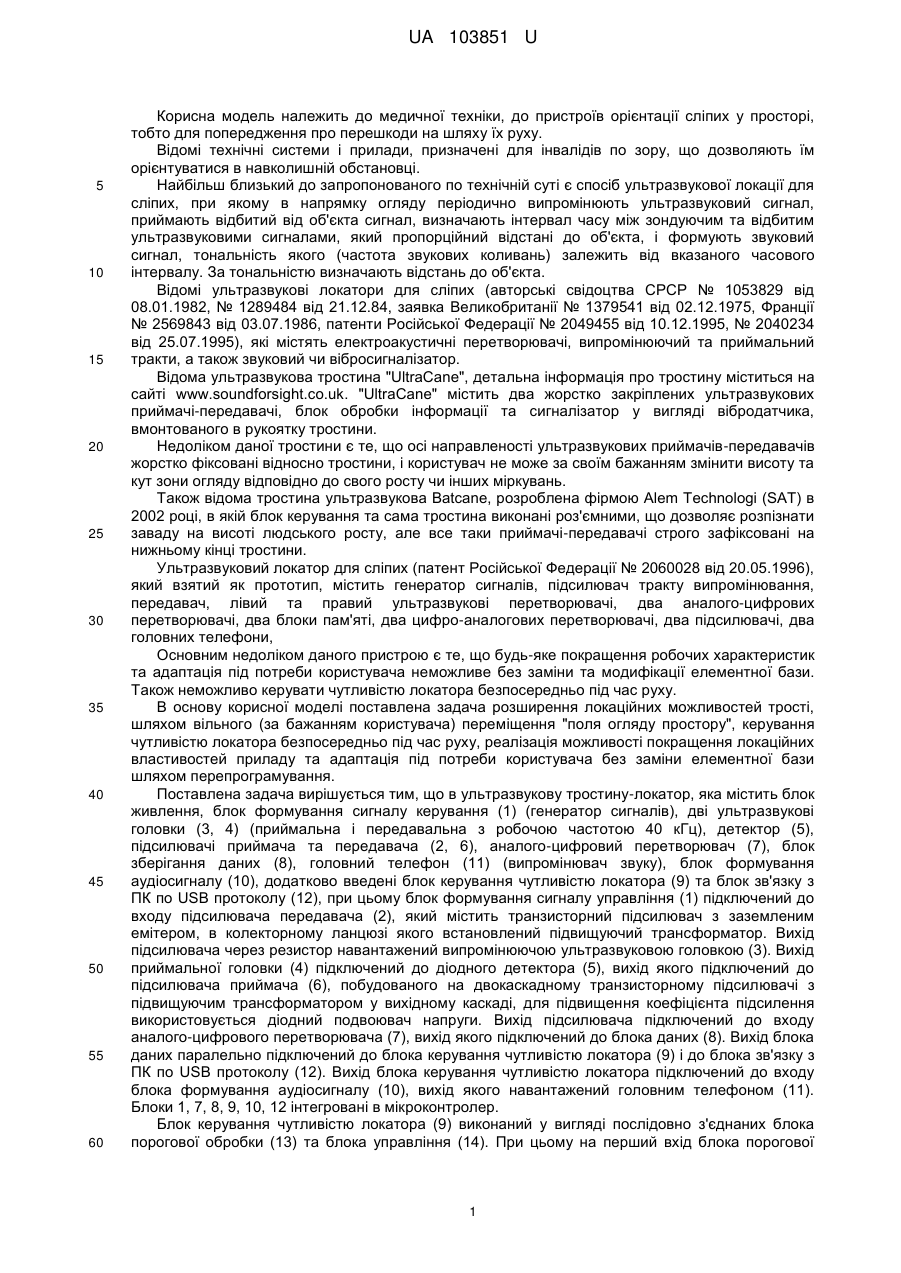
Реферат: Ультразвукова тростина-локатор для сліпих людей містить блок живлення, блок формування сигналу керування (генератор сигналів), дві ультразвукові головки (приймальна й передавальна з робочою частотою 40 кГц), детектор, підсилювачі приймача та передавача, аналого-цифровий перетворювач, блок зберігання даних, головний телефон (випромінювач звуку), блок формування аудіосигналу. В ультразвукову тростину-локатор введені блок зв'язку з персональним комп'ютером по USB протоколу та блок керування з чутливістю локатора. UA 103851 U про видачу патенту: UA 103851 U UA 103851 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до медичної техніки, до пристроїв орієнтації сліпих у просторі, тобто для попередження про перешкоди на шляху їх руху. Відомі технічні системи і прилади, призначені для інвалідів по зору, що дозволяють їм орієнтуватися в навколишній обстановці. Найбільш близький до запропонованого по технічній суті є спосіб ультразвукової локації для сліпих, при якому в напрямку огляду періодично випромінюють ультразвуковий сигнал, приймають відбитий від об'єкта сигнал, визначають інтервал часу між зондуючим та відбитим ультразвуковими сигналами, який пропорційний відстані до об'єкта, і формують звуковий сигнал, тональність якого (частота звукових коливань) залежить від вказаного часового інтервалу. За тональністю визначають відстань до об'єкта. Відомі ультразвукові локатори для сліпих (авторські свідоцтва СРСР № 1053829 від 08.01.1982, № 1289484 від 21.12.84, заявка Великобританії № 1379541 від 02.12.1975, Франції № 2569843 від 03.07.1986, патенти Російської Федерації № 2049455 від 10.12.1995, № 2040234 від 25.07.1995), які містять електроакустичні перетворювачі, випромінюючий та приймальний тракти, а також звуковий чи вібросигналізатор. Відома ультразвукова тростина "UltraCane", детальна інформація про тростину міститься на сайті www.soundforsight.co.uk. "UltraCane" містить два жорстко закріплених ультразвукових приймачі-передавачі, блок обробки інформації та сигналізатор у вигляді вібродатчика, вмонтованого в рукоятку тростини. Недоліком даної тростини є те, що осі направленості ультразвукових приймачів-передавачів жорстко фіксовані відносно тростини, і користувач не може за своїм бажанням змінити висоту та кут зони огляду відповідно до свого росту чи інших міркувань. Також відома тростина ультразвукова Batcane, розроблена фірмою Alem Technologi (SAT) в 2002 році, в якій блок керування та сама тростина виконані роз'ємними, що дозволяє розпізнати заваду на висоті людського росту, але все таки приймачі-передавачі строго зафіксовані на нижньому кінці тростини. Ультразвуковий локатор для сліпих (патент Російської Федерації № 2060028 від 20.05.1996), який взятий як прототип, містить генератор сигналів, підсилювач тракту випромінювання, передавач, лівий та правий ультразвукові перетворювачі, два аналого-цифрових перетворювачі, два блоки пам'яті, два цифро-аналогових перетворювачі, два підсилювачі, два головних телефони, Основним недоліком даного пристрою є те, що будь-яке покращення робочих характеристик та адаптація під потреби користувача неможливе без заміни та модифікації елементної бази. Також неможливо керувати чутливістю локатора безпосередньо під час руху. В основу корисної моделі поставлена задача розширення локаційних можливостей трості, шляхом вільного (за бажанням користувача) переміщення "поля огляду простору", керування чутливістю локатора безпосередньо під час руху, реалізація можливості покращення локаційних властивостей приладу та адаптація під потреби користувача без заміни елементної бази шляхом перепрограмування. Поставлена задача вирішується тим, що в ультразвукову тростину-локатор, яка містить блок живлення, блок формування сигналу керування (1) (генератор сигналів), дві ультразвукові головки (3, 4) (приймальна і передавальна з робочою частотою 40 кГц), детектор (5), підсилювачі приймача та передавача (2, 6), аналого-цифровий перетворювач (7), блок зберігання даних (8), головний телефон (11) (випромінювач звуку), блок формування аудіосигналу (10), додатково введені блок керування чутливістю локатора (9) та блок зв'язку з ПК по USB протоколу (12), при цьому блок формування сигналу управління (1) підключений до входу підсилювача передавача (2), який містить транзисторний підсилювач з заземленим емітером, в колекторному ланцюзі якого встановлений підвищуючий трансформатор. Вихід підсилювача через резистор навантажений випромінюючою ультразвуковою головкою (3). Вихід приймальної головки (4) підключений до діодного детектора (5), вихід якого підключений до підсилювача приймача (6), побудованого на двокаскадному транзисторному підсилювачі з підвищуючим трансформатором у вихідному каскаді, для підвищення коефіцієнта підсилення використовується діодний подвоювач напруги. Вихід підсилювача підключений до входу аналого-цифрового перетворювача (7), вихід якого підключений до блока даних (8). Вихід блока даних паралельно підключений до блока керування чутливістю локатора (9) і до блока зв'язку з ПК по USB протоколу (12). Вихід блока керування чутливістю локатора підключений до входу блока формування аудіосигналу (10), вихід якого навантажений головним телефоном (11). Блоки 1, 7, 8, 9, 10, 12 інтегровані в мікроконтролер. Блок керування чутливістю локатора (9) виконаний у вигляді послідовно з'єднаних блока порогової обробки (13) та блока управління (14). При цьому на перший вхід блока порогової 1 UA 103851 U 5 10 15 20 25 30 35 40 обробки (13) надходить сигнал з виходу блоку даних (8), а на другий вхід - сигнал з виходу блоку управління (14), вихід блока порогової обробки з'єднаний з входом блока формування аудіосигналу (10). Суть корисної моделі пояснює креслення. На кресленні наведено блок-схему ультразвукової тростини-локатора. Реалізована можливість керувати пороговим значенням амплітуди безпосередньо під час руху за допомогою кнопок на лицевій панелі, що дозволяє керувати чутливістю локатора до розмірів перешкод на шляху. Кнопки виконані випуклими в металевому корпусі і легко знаходяться користувачем. Зв'язок приладу з персональним комп'ютером здійснюється через стандартний інтерфейс (USB), це дає можливість здійснювати програмну обробку і аудіовізуалізацію сигналу на комп'ютері. Що в свою чергу дозволяє налаштовувати чутливість роботи приладу та перевіряти правильність його роботи. Також зв'язок з ПК дає можливість забезпечити максимальну гнучкість і можливість адаптації під потреби кожного користувача шляхом зміни керуючої програми мікроконтролера, прошивка якого здійснюється через той же інтерфейс. Це дає можливість покращити локаційні властивості приладу без заміни елементної бази, що є неможливим в аналогічних розробках. Корпус приладу виконаний у вигляді пульта з автономним батарейним живленням, що дозволяє користувачу за своїм бажанням змінювати "поле сканування простору" безпосередньо під час руху, направляючи пульт в потрібну сторону. Ультразвукова тростина-локатор для сліпих працює наступним чином. Мікроконтролер формує пачку імпульсів частотою 40 кГц ультразвуковий сигнал попередньо підсилений підсилювачем передавача випромінюється в навколишнє середовище п'єзокерамічною головкою. Відбиті від перешкоди ехо-сигнали з виходу приймальної головки надходять на діодний обмежувач рівня сигналу, для зменшення впливу імпульсних завад. Після цього сигнал підсилюється приймачем і надходить на аналоговий вхід мікроконтролера для оцифровки. Оцифрований масив даних тимчасово зберігається в пам'яті процесора для подальшої обробки. Далі в блоці порогової обробки визначається чи є на шляху руху перешкода шляхом порівняння амплітуд отриманих сигналів з пороговим значенням, яке може змінюватися користувачем. Так як локатор-тростина реагує на найближчу перешкоду при першому позитивному результаті подальша перевірка зупиняється і даний елемент масиву вважається відбитим сигналом. Дані передаються в блок формування аудіосигналу, де визначається інтервал часу між зондуючим і відбитим ультразвуковими сигналами, пропорційний відстані до об'єкта і формується звуковий сигнал, тональність (частота) якого залежить від виміряного часового інтервалу. За тональністю визначається відстань до об'єкта. Аудіосигнал випромінюється за допомогою головного телефону, підключеного до виходу блока формування аудіосигналу. Оскільки рівень прийнятого ехо-сигналу залежить від розмірів, форми та типу перешкод, то власник локатора після попереднього навчання і тренування зможе визначати не тільки відстань, а і характер завади, що розширює інформаційність пристрою, забезпечуючи тим самим підвищення безпеки руху сліпого по вибраному маршруту. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 50 1. Ультразвукова тростина-локатор для сліпих людей, що містить блок живлення, блок формування сигналу керування (генератор сигналів), дві ультразвукові головки (приймальна й передавальна з робочою частотою 40 кГц), детектор, підсилювачі приймача та передавача, аналого-цифровий перетворювач, блок зберігання даних, головний телефон (випромінювач звуку), блок формування аудіосигналу, яка відрізняється тим, що в неї введені блок зв'язку з персональним комп'ютером по USB протоколу та блок керування чутливістю локатора. 2. Ультразвукова тростина-локатор за п. 1, яка відрізняється тим, що блок керування з чутливістю локатора виконаний у вигляді послідовно з'єднаних блока порогової обробки та блока керування. 2 UA 103851 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01S 15/02, A61F 9/08, A61H 3/06
Мітки: ультразвукова, сліпих, тростина-локатор
Код посилання
<a href="https://ua.patents.su/5-103851-ultrazvukova-trostina-lokator-dlya-slipikh.html" target="_blank" rel="follow" title="База патентів України">Ультразвукова тростина-локатор для сліпих</a>
Пристрій для навігації сліпих людей
Номер патенту: 60467
Опубліковано: 25.06.2011
Автори: Смірний Михайло Федорович, Лехцієр Леонід Рувімович
Мітки: сліпих, навігації, пристрій, людей
Формула / Реферат:
Пристрій для навігації сліпих людей, що містить відеокамеру з вбудованим сканером дальності, блок гучномовців (навушників), блок формування просторової 3D-моделі навколишнього оточення, блок сегментації фрагментів зображення, двомірну вібруючу сенсорну матрицю навколишнього оточення, блок синтезатора мовних рекомендацій, який відрізняється тим, що як двомірну вібруючу сенсорну матрицю застосовано блок керування динамічним скануванням...
Пристрій для навігації сліпих людей
Номер патенту: 61592
Опубліковано: 25.07.2011
Автори: Лехцієр Леонід Романович, Крамар Микола Максимович, Стрігін Роман Генадійович, Аптекарь Михайло Давидович
Мітки: навігації, сліпих, людей, пристрій
Формула / Реферат:
Пристрій для навігації сліпих людей, що містить відеокамеру з вбудованим сканером дальності, блок формування відеозображення, сегментації фрагментів та аналізу їх координат, блок формування звукових образів зображень та синтезу мовних рекомендацій і блок гучномовців, який відрізняється тим, що пристрій оснащено блоком бази знань навколишньої місцевості і блоком ідентифікації місцевості та оптимізації маршруту, причому перший та другий вихід...
Локатор для виявлення порушень суцільності бурильних труб
Номер патенту: 31354
Опубліковано: 15.12.2000
Автор: Вирста Ярослав Ярославович
МПК: E21B 47/00
Мітки: порушень, локатор, виявлення, суцільності, труб, бурильних
Формула / Реферат:
Локатор для виявлення порушень суцільності бурильних труб, який містить трансформатор з магнітопроводами круглого перерізу і електронну схему посилення, який відрізняється тим, що трансформатор виконаний з магнітопроводом, розташованим вздовж осьової лінії локатора, а вторинні обмотки з різним числом витків приєднані до вхідного ланцюга електронної схеми посилення та розташовані зустрічно вторинним обмоткам, приєднаним до вихідного ланцюга...
Прилад для орієнтування сліпих
Номер патенту: 59045
Опубліковано: 15.08.2003
Автор: Дандур'янц Олег Іванович
МПК: A61F 9/08
Мітки: сліпих, орієнтування, прилад
Формула / Реферат:
Прилад для орієнтування сліпих, що містить локаційну систему сканування, вихід якої з’єднано із входом системи перетворення, вихід якої з’єднано із входом системи індикації, до складу якої входять тактильні сигналізатори у вигляді п’єзокристалів (13), який відрізняється тим, що локаційна система сканування виконана у вигляді телекамери (1), а система перетворення містить аналого-цифровий перетворювач (3), вхід якого з’єднано з першим виходом...
Система візуального спостереження сліпих зон

Номер патенту: 51864
Опубліковано: 10.08.2010
Автор: Рябошапка Костянтин Олександрович
МПК: G01S 7/04, G08G 1/123, B62D 25/00
Мітки: сліпих, спостереження, зон, візуального, система
Формула / Реферат:
Система візуального спостереження сліпих зон, що включає розміщений в салоні автомобіля, в полі зору водія, дисплей для показу сліпих зон, візуальна інформація про які передається від відповідно встановлених відеокамер, яка відрізняється тим, що дисплей розташований на кожній із двох передніх стійок кузова автомобіля, у більшій частині покриваючи, звернену усередину салону, поверхню стійок.
Попередній патент: Машина для розсівання мінеральних добрив
Наступний патент: Спосіб дистанційного контролю, визначення роботоздатності і управління експлуатацією транспортних засобів
Випадковий патент: Спосіб профілактики септичних ускладнень після операцій на шлунково-кишковому тракті