Пристрій контролю рівня рідинних середовищ з кільцевим рухом ультразвукового імпульсу
Номер патенту: 103916
Опубліковано: 12.01.2016
Автори: Літвінов Костянтин Анатолійович, Проказа Олена Іванівна, Стенцель Йосип Іванович
Формула / Реферат
Ультразвуковий пристрій контролю рівня рідинних середовищ (УЗКР), який працює за принципом визначення часу проходження ультразвуковим імпульсом (УЗІ) подвійної відстані від п'єзокерамічного приймача-передавача до контролюючої поверхні, котрий включає послідовно з'єднані п'єзокерамічний випромінювач, підсилювач, компаратор, мікроконтролер, регульоване джерело імпульсів збудження, і з'єднане з п'єзокерамічним випромінювачем, а компаратор з'єднаний з джерелом опорної напруги, мікроконтролер - з блоком обробки та індикації, а блок визначення амплітуди сигналу - з підсилювачем і мікроконтролером, а також має реперний пристрій у формі металевого кільця, який відрізняється тим, що з метою зменшення зони нечутливості та підвищення точності вимірювального контролю УЗКР з кільцевим рухом ультразвукового імпульсу має реперний алгоритм, котрий являє собою опорний електричний сигнал, пропорційний коефіцієнту співвідношення між часом зворотного та прямого ходу УЗІ, причому вимірюється час прямого та сумарний час зворотного ходу УЗІ, котрий в компараторі порівнюється з розрахованим значенням електричного сигналу, визначеним за поточним значенням коефіцієнта співвідношення, знайденим за значеннями часу зворотного та прямого ходу УЗІ, за різницею котрих розраховується поправка, котра уводиться до часу прямого ходу УЗІ.
Текст
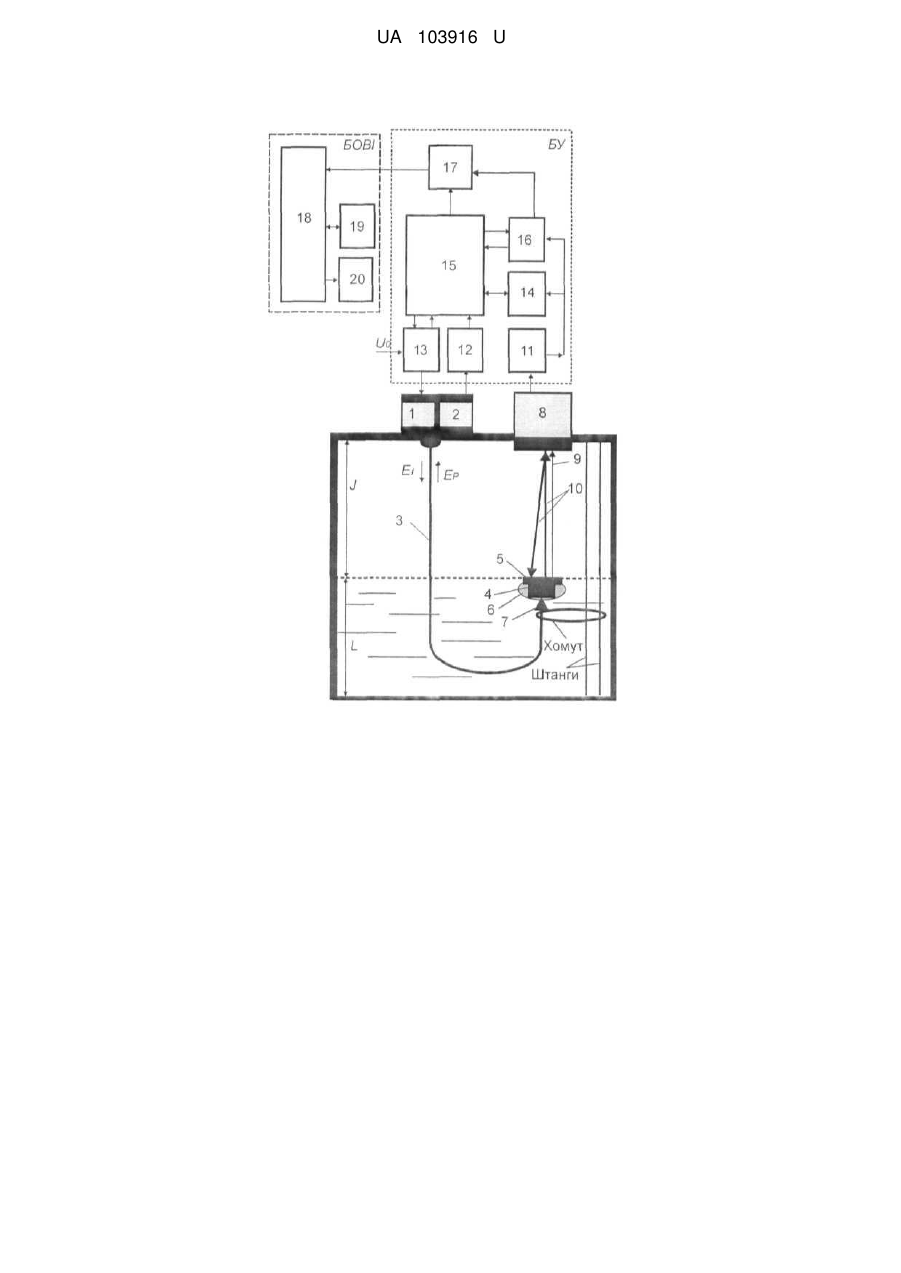
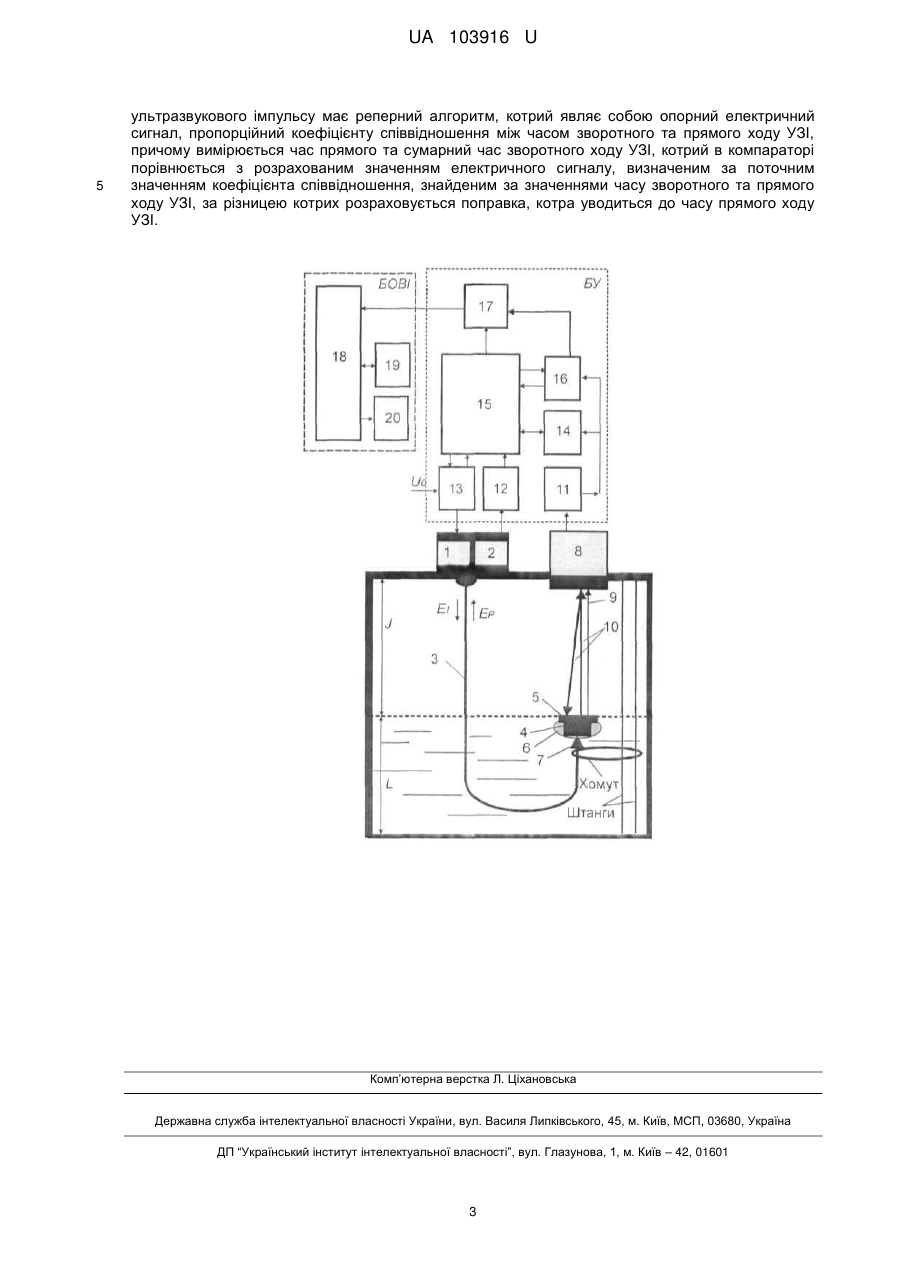
Реферат: Ультразвуковий пристрій контролю рівня рідинних середовищ (УЗКР) працює за принципом визначення часу проходження ультразвуковим імпульсом (УЗІ) подвійної відстані від п'єзокерамічного приймача-передавача до контролюючої поверхні, котрий включає послідовно з'єднані п'єзокерамічний випромінювач, підсилювач, компаратор, мікроконтролер, регульоване джерело імпульсів збудження, і з'єднане з п'єзокерамічним випромінювачем, а компаратор з'єднаний з джерелом опорної напруги, мікроконтролер - з блоком обробки та індикації, а блок визначення амплітуди сигналу - з підсилювачем і мікроконтролером, а також має реперний пристрій у формі металевого кільця. Пристрій має реперний алгоритм, котрий являє собою опорний електричний сигнал, пропорційний коефіцієнту співвідношення між часом зворотного та прямого ходу УЗІ. Вимірюється час прямого та сумарний час зворотного ходу УЗІ, котрий в компараторі порівнюється з розрахованим значенням електричного сигналу, визначеним за поточним значенням коефіцієнта співвідношення, знайденим за значеннями часу зворотного та прямого ходу УЗІ, за різницею котрих розраховується поправка, котра уводиться до часу прямого ходу УЗІ. UA 103916 U (12) UA 103916 U UA 103916 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до вимірювальної техніки і може бути використана для контролю рівня рідинних середовищ (PC) у хімічній, нафтовій, енергетичній, фармацевтичній, металургійній та інших галузях промисловості. Відомий ультразвуковий рівнемір [А. св. СРСР № 564538, G01F23/28, 21.10.1977 "Ультразвуковой уровнемер с цифровым отсчетом"] працює за принципом вимірювання часу проходження ультразвуковим імпульсом (УЗІ) подвійної відстані від приймача-передавача до контролюючої поверхні та визначає рівень за добутком половини виміряного часу і відомої швидкості ультразвуку в даному середовищі. Недоліком відомого рівнеміра є проходження УЗІ подвійної відстані в газовому середовищі (ГС), що суттєво послаблює сприймаючий сигнал, залежність його показань від параметрів цього середовища (тиску, температури, складу газу), в якому розповсюджується УЗІ. Відомий ультразвуковий рівнемір "ВЗЛЕТ УР" виробництва ЗAT "Взлет" [патент РФ № 2195635, G01F23/28, опубл. 27.12.2002 "Способ измерения уровня жидких и сыпучих сред"], який працює за принципом вимірювання часу проходження УЗІ подвійної відстані від приймачапередавача до поверхні рідинного середовища (ПРС), але відрізняється тим, що як час проходження УЗІ вимірюють час проходження від моменту зміни однієї частоти на іншу у випроміненому імпульсі до моменту відповідної зміни частоти в прийнятому приймачіпередавачем імпульсі, відбитим від ПРС. Рівнемір має реперний пристрій у формі пластини, яка встановлена на фіксованій відстані від приймача-передавача. За часом проходження УЗІ подвійної відстані від приймача-передавача до поверхні реперної пластини визначається швидкість УЗІ. До недоліків, які обмежують використання даного рівнеміра, належить наявність великої зони нечутливості (0,5 метрів), малий діапазон вимірювання (від 0,5 до 5 метрів) і достатньо низький рівень компенсації зміни параметрів газового середовища. Найбільш близьким до запропонованого рівнеміра є ультразвуковий рівнемір МТМ900 виробництва ТОВ НВП "Мікротерм" [патент України № 82594, G01S15/00, опубл. 11.02.2008 "Спосіб вимірювання рівня рідких середовищ і ультразвуковий рівнемір"]. Вимірювання рівня PC здійснюється за принципом визначення часу проходження УЗІ подвійної відстані від п'єзокерамічного приймача-передавача до ПРС, який реалізований в блоці датчика. Блок датчика складається з п'єзокерамічного приймача-передавача, який підключений до підсилювача. Управління підсилювачем здійснюється за допомогою мікроконтролера, який управляє блоком формування імпульсів збудження, підключеного до п'єзокерамічного випромінювача (ПКВ). Час проходження УЗІ визначається від моменту досягнення максимального відхилення мембрани приймача-передавача до моменту перевищення установленого значення підсиленим відбитим сигналом. Порівняння відбитого сигналу з установленим значенням здійснюється за допомогою мікроконтролера. Для компенсації зміни параметрів ГС використовується реперний пристрій у формі кільця, який установлений на фіксованій відстані від ПКВ. До недоліків такого рівнеміра слід віднести: наявність великої зони нечутливості, яка досягає 600 мм, чутливість до перешкод і повторно відбитих УЗІ, які обумовлені великим коефіцієнтом підсилення при зміні малих значень рівня, мала точність вимірювання через низький рівень компенсації зміни фізичних параметрів ГС, яка дорівнює 0,25 % від діапазону вимірювального контролю, малий діапазон вимірювального контролю, який не перевищує 5000 мм, що обмежує широке їх використання в системах господарських розрахунків, особливо при контролю рівня PC у резервуарах висотою до 10 метрів. Задача, на вирішення якої направлено корисну модель, яка заявляється, полягає у підвищенні точності й вірогідності вимірювального контролю рівня рідинних середовищ засобом з кільцевим рухом ультразвукового сигналу. Поставлена задача вирішується за рахунок того, що в заявленому засобі вимірювального контролю рівня здійснюється компенсація зміни параметрів газового середовища реперним алгоритмом, який являє собою відношення часу t1 проходження УЗІ від випромінювача до приймача (час прямого ходу УЗІ) та часом, який складається з суми часу прямого t1 та часу t2 зворотного ходу УЗІ. При нормальних умовах вимірювального контролю рівня відношення часу t1/(t1+t2)=t1/tΣ=kt=const, де tΣ=t1+t2, а відношення відповідних відстаней (R1+R2)/R1=kL=2=const, де R1 - відстань прямого ходу УЗІ; R2 - відстань зворотного ходу УЗІ. Так як R1=R2, то незалежно від вимірювального рівня L та відхилення впливових факторів від їх нормованих значень, відношення kL є сталою величиною і завжди дорівнює 2. Так як час tΣ залежить не тільки від відстані R1 і R2, але й від фізичних параметрів газового середовища, то час tΣ є завжди більшим від 2t1. Експериментально установлено, що при одному і тому ж значенні рівня PC час зворотного ходу УЗІ залежить від зміни фізичних параметрів ГС як: тиску, температури та складу газу. Тобто відношення часу tΣ/t1, при зміні фізичних параметрів газу не дорівнює відношенню часу tΣH/t1H, 1 UA 103916 U 5 10 15 20 25 30 35 40 45 50 55 60 де t1H і tΣH - час прямого ходу та сумарний час проходження УЗІ подвійної відстані при умовах градуювання ультразвукового засобу контролю рівня (УЗКР). Для діапазону вимірювального контролю рівня від 0,1 до 10 метрів і нормальних умовах відношення tΣ/t1=tΣH/t1H=ktH=const, де ktH - нормоване значення коефіцієнта співвідношення часу, котре записується в пам'ять блока обробки вимірювальної інформації (БОВІ). Поточне значення коефіцієнта співвідношення kt постійно розраховується в БОВІ за виміряними значеннями часу t1 (прямого ходу УЗІ) та сумарним часом tΣ (зворотного ходу УЗІ) і порівнюється з його нормованим значенням. При kt≠ktH визначається їх різниця Δkt=kt-ktH і розраховується відповідна їй поправка у вигляді часу, котра уводиться в результат в вимірювання часу прямого ходу УЗІ. Якщо УЗКР використовується для вимірювання рівня в діапазоні, в котрому ступінь поглинання УЗІ (згідно зі законом Бугера-Ламберта-Бера) практично є незмінною, то відношення ktH=kL=2. Таким чином, співвідношення часу прямого та зворотного ходу УЗІ в ГС можна використати у вигляді реперного сигналу для УЗКР з кільцевим рухом УЗІ. Блок-схема роботи вимірювальної схеми УЗКР приведена на кресленні, на якому позначено: 1 - блок формування електричного збуджуючого імпульсу (ЕЗІ); 2 - приймач УЗІ зворотного ходу; 3 - кабель; 4 - перетворювач; 5 - металева мембрана; 6 - поплавок; 7 - електрод; 8 приймач УЗІ прямого ходу; 9 - УЗІ прямого ходу; 10 - УЗІ зворотного ходу; 11 - підсилювач електрорушійної сили (ЕРС) прямого ходу УЗІ; 12 - підсилювач ЕРС зворотного ходу УЗІ; 13 блок живлення; 14 - блок визначення амплітуди сигналу; 15 - мікропроцесорний контролер блоку управління (БУ); 16 - компаратор; 17 - блок нормалізації; 18 - мікропроцесорний контролер БОВІ; 19 - блок пам'яті; 20 - блок індикації. Принцип роботи вимірювальної схеми УЗКР полягає в наступному. Блок 13, який призначений для живлення електричної вимірювальної схеми УЗКР, формує ЕЗІ заданою амплітудою Е1 і подає його по кабелю 3 до блок формування ЕЗІ 1, який перетворює цей електричний сигнал в УЗІ за допомогою п'єзокерамічного елемента (ПКЕ) 4. Так як ПКЕ жорстко зв'язаний з металевою мембраною 5, то УЗІ випромінюються в ГС товщиною J. Після проходження ГС УЗІ 9 сприймаються приймачем 8, у котрому перетворюються в ЕРС з частотою УЗІ, формуючи таким чином електричний сигнал прямого ходу. Далі цей сигнал надходить на підсилювач 11, блок 14 визначення амплітуди та компаратор 16. Одночасно УЗІ 10 відбиваються від поверхні приймача 8 і повертаються до перетворювача 4 і далі по кабелю 3 до приймача 2, формуючи таким чином сигнал зворотного ходу Ер. Останній поступає в підсилювач 12 і далі направляється в контролер блока управління (БУ) 15. В останній надходить також сигнал прямого ходу. У БУ запам'ятовуються сигнали прямого та зворотного ходу УЗІ, визначається час прямого t1 і зворотного tΣ2 ходу, розраховується поточне значення коефіцієнта співвідношення kt, електричний сигнал ut, котрий відповідає цьому співвідношенню, далі цей сигнал порівнюється з сигналом utH, котрий відповідає опорному коефіцієнту ktH і визначається їх різниця Δu=ut-utH. Якщо Δu≠0, то включається генератор тактових імпульсів, який послідовно генерує імпульси відповідної тривалості ti і подає їх на компаратор 16. Одночасно з генератором тактових імпульсів включається лічильник, котрий відраховує їх кількість N доти, поки не виконуватиметься наступна рівність: tiN=ku Δu, де ku - коефіцієнт перетворення. У компаратор 16 уводиться відповідна поправка і корегований сигнал надходить в блок 17, а далі подається в контролер 18 БОБІ. Пристрій контролю рівня рідинних середовищ з кільцевим рухом ультразвукового імпульсу дозволяє зменшити зону нечутливості ультразвукового пристрою контролю рівня PC практично до 10 разів за рахунок відсутності реперного металевого пристрою, розміщеного на відстані від 0,4 до 0,6 м та підвищити точність вимірювального контролю рівня PC практично до 5 разів за рахунок уведення поправки в результат вимірювання, яка формується за відхиленням співвідношення між часом зворотного та прямого ходу УЗІ. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Ультразвуковий пристрій контролю рівня рідинних середовищ (УЗКР), який працює за принципом визначення часу проходження ультразвуковим імпульсом (УЗІ) подвійної відстані від п'єзокерамічного приймача-передавача до контролюючої поверхні, котрий включає послідовно з'єднані п'єзокерамічний випромінювач, підсилювач, компаратор, мікроконтролер, регульоване джерело імпульсів збудження, і з'єднане з п'єзокерамічним випромінювачем, а компаратор з'єднаний з джерелом опорної напруги, мікроконтролер - з блоком обробки та індикації, а блок визначення амплітуди сигналу - з підсилювачем і мікроконтролером, а також має реперний пристрій у формі металевого кільця, який відрізняється тим, що з метою зменшення зони нечутливості та підвищення точності вимірювального контролю УЗКР з кільцевим рухом 2 UA 103916 U 5 ультразвукового імпульсу має реперний алгоритм, котрий являє собою опорний електричний сигнал, пропорційний коефіцієнту співвідношення між часом зворотного та прямого ходу УЗІ, причому вимірюється час прямого та сумарний час зворотного ходу УЗІ, котрий в компараторі порівнюється з розрахованим значенням електричного сигналу, визначеним за поточним значенням коефіцієнта співвідношення, знайденим за значеннями часу зворотного та прямого ходу УЗІ, за різницею котрих розраховується поправка, котра уводиться до часу прямого ходу УЗІ. Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01F 23/28
Мітки: рідинних, пристрій, ультразвукового, середовищ, кільцевим, імпульсу, рухом, рівня, контролю
Код посилання
<a href="https://ua.patents.su/5-103916-pristrijj-kontrolyu-rivnya-ridinnikh-seredovishh-z-kilcevim-rukhom-ultrazvukovogo-impulsu.html" target="_blank" rel="follow" title="База патентів України">Пристрій контролю рівня рідинних середовищ з кільцевим рухом ультразвукового імпульсу</a>
Ультразвуковий пристрій для контролю рівня рідинних середовищ
Номер патенту: 110220
Опубліковано: 10.12.2015
Автори: Стенцель Йосип Іванович, Літвінов Костянтин Анатолійович, Рябіченко Антон Вікторович
МПК: G01F 23/296
Мітки: пристрій, рідинних, рівня, середовищ, ультразвуковий, контролю
Формула / Реферат:
Ультразвуковий пристрій для вимірювання рівня рідинних середовищ, який включає послідовно з'єднані основний п'єзокерамічний випромінювач (ПКВ), який збуджується електричним імпульсом, блок управління (БУ) та блок обробки інформації (БОІ), який містить мікроконтролер та з'єднані з ним блоки перетворення сигналу, пам'яті та індикації, при цьому БУ містить послідовно з'єднані підсилювач, компаратор, керуючий мікроконтролер та регульоване...
Магнітострикційний пристрій для контролю рівня рідинних середовищ
Номер патенту: 98707
Опубліковано: 12.05.2015
Автори: Проказа Олена Іванівна, Стенцель Йосип Іванович, Рябіченко Антон Вікторович, Шаповалов Олексій Іванович
МПК: G01F 23/28
Мітки: магнітострикційний, пристрій, рідинних, рівня, контролю, середовищ
Формула / Реферат:
Магнітострикційний пристрій (МСПр) для вимірювання рівня рідинних середовищ (PC), який здійснюється за принципом визначення часу проходження електричним струмовим імпульсом (ЕСІ) відстані від місця його подачі до електромагнітного перетворювача (ЕМП), котрий являє собою плаваючий на поверхні PC поплавок з постійним магнітом, і ультразвукового торсійного імпульсу (УЗТІ) від ЕМП до приймача цього імпульсу, а вплив зміни температури PC...
Пристрій для вимірювання рівня рідинних середовищ
Номер патенту: 30475
Опубліковано: 15.11.2000
Автори: Черепков Олексій Іванович, Андрієнко Юрій Олександрович, Спалек Юрій Михайлович, Жуков Борис Володимирович, Воронін Альберт Олексійович
МПК: G01F 23/28
Мітки: рідинних, рівня, пристрій, середовищ, вимірювання
Формула / Реферат:
Пристрій для вимірювання рівня рідинних середовищ, який містить вимірювальну трубу з акустичним випромінювачем зондуючого сигналу та першим приймачем акустичних сигналів, підсилювач - формувач зондуючих сигналів, підсилювач-формувач прийнятих сигналів, схему вимірювання часового інтервалу, функційно пов'язаного з вимірюємим рівнем та індикатор, що відрізняється тим, що до нього введений другий приймач акустичних сигналів, який розташовано...
Пристрій ультразвукового контролю зміни концентрацій домішок в газових та рідинних середовищах
Номер патенту: 63422
Опубліковано: 15.01.2004
Автори: Зеленков Олександр Аврамович, Казак Василь Миколайович, Пазюк Олексій Вячеславович, Соченко Петро Степанович
МПК: G01J 3/00
Мітки: контролю, газових, середовищах, рідинних, зміни, концентрацій, пристрій, домішок, ультразвукового
Формула / Реферат:
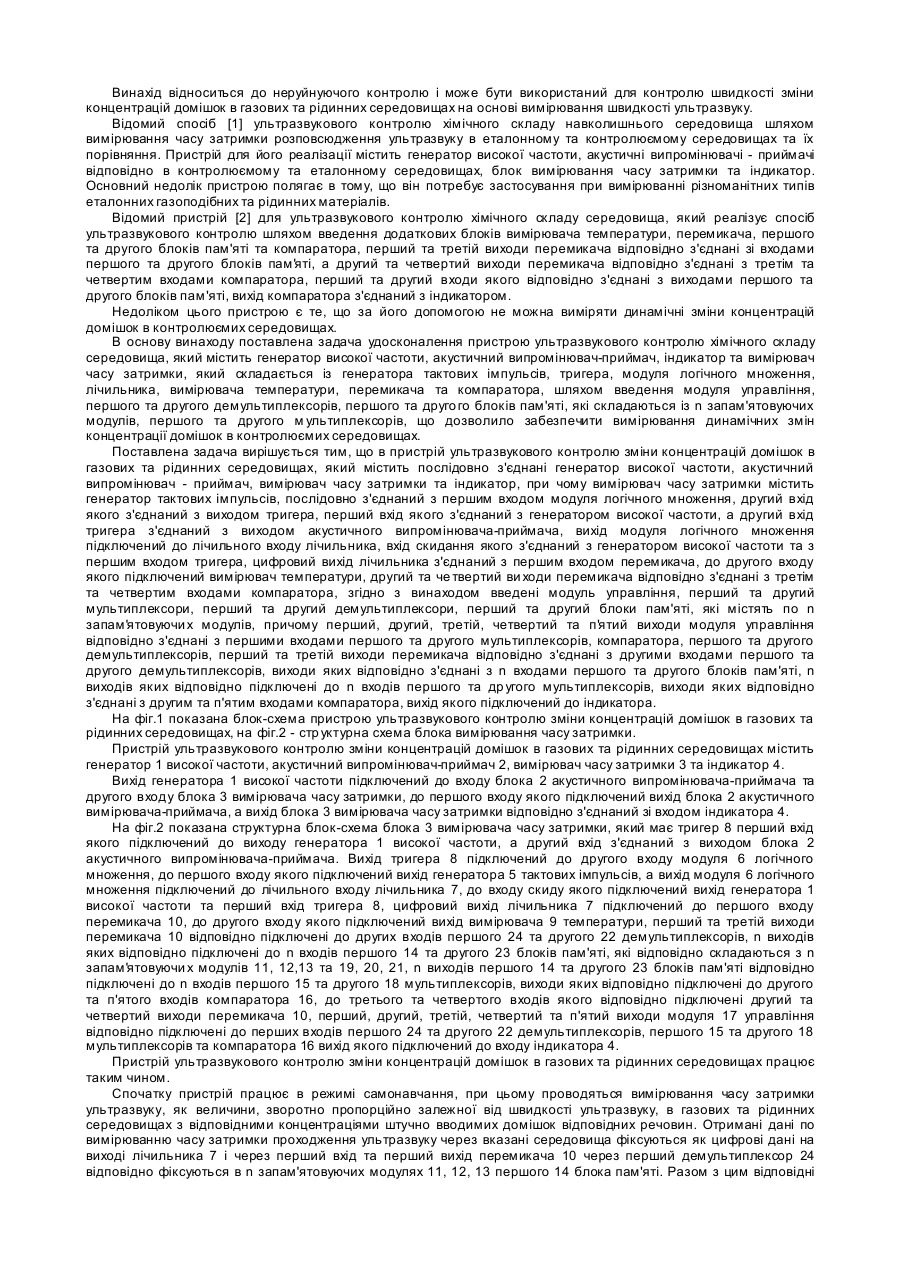
1. Пристрій ультразвукового контролю зміни концентрацій домішок в газових та рідинних середовищах, який містить послідовно з'єднані генератор високої частоти, акустичний випромінювач-приймач, вимірювач часу затримки та індикатор, причому вимірювач часу затримки містить генератор тактових імпульсів, послідовно з'єднаний з першим входом модуля логічного множення, другий вхід якого з'єднаний з виходом тригера, перший вхід якого з'єднаний з...
Пристрій для вимірювання рівня рідинних середовищ
Номер патенту: 321
Опубліковано: 30.04.1999
Автори: Андрієнко Юрій Олександрович, Спалек Юрій Михайлович, Жуков Борис Володимирович, Зиков Віктор Володимирович, Воронін Альберт Олексійович, Черепков Олексій Іванович
МПК: G01F 23/28
Мітки: рідинних, вимірювання, середовищ, рівня, пристрій
Формула / Реферат:
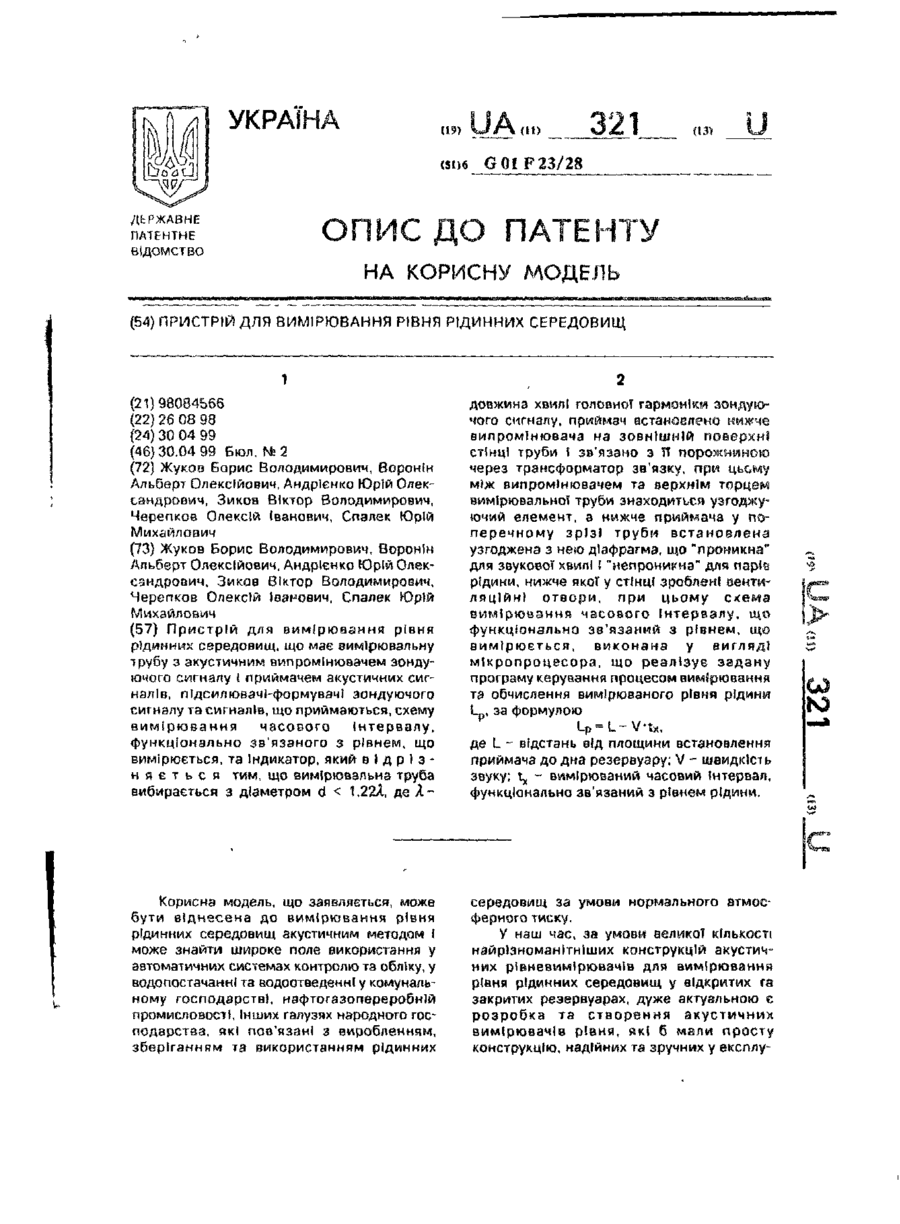
Пристрій для вимірювання рівня рідинних середовищ, що має вимірювальну трубу з акустичним випромінювачем зондуючого сигналу і приймачем акустичних сигналів, підсилювачі-формувачі зондуючого сигналу та сигналів, що приймаються, схему вимірювання часового - інтервалу, функціонально зв'язаного з рівнем, що вимірюється, та індикатор, який відрізняється тим, що вимірювальна труба вибирається з діаметром d < 1.22l, де l - довжина хвилі головної...
Попередній патент: Відвальна стріла штабелеукладача
Наступний патент: Модульний контейнерний комплекс
Випадковий патент: Піперидид 2-тіазоліламіду цитраконової кислоти, який проявляє антиоксидантну активність