Пристрій магнітний для вилучення сторонніх тіл
Номер патенту: 110384
Опубліковано: 10.10.2016
Автори: Негодуйко Володимир Володимирович, Великодний Олексій Миколайович, Біленький Віктор Андрійович, Михайлусов Ростислав Миколайович, Лурін Ігор Анатолійович

Формула / Реферат
Пристрій магнітний для вилучення сторонніх тіл, що містить ручку, рухомий стрижень, тримачі та магніт, який відрізняється тим, що рухомий стрижень виконаний у вигляді внутрішньої тяги, робоча частина з магнітом містить ексцентричний затискний механізм, виконаний з можливістю здійснення оберту в направляючих пазах, пристрій додатково містить ручку-маніпулятор.
Текст
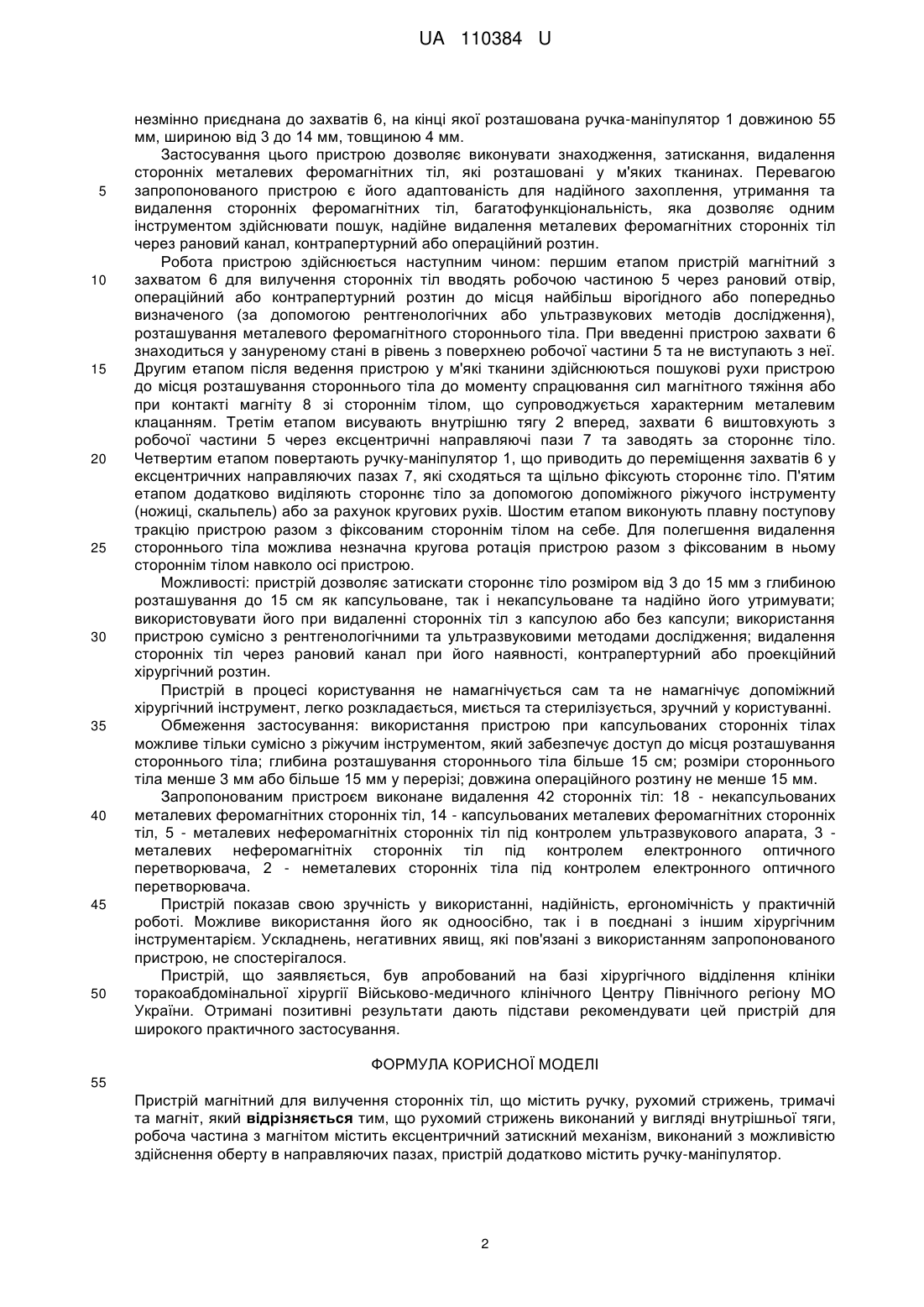
Реферат: Пристрій магнітний для вилучення сторонніх тіл, що містить ручку, рухомий стрижень, тримачі та магніт, причому рухомий стрижень виконаний у вигляді внутрішньої тяги, робоча частина з магнітом містить ексцентричний затискний механізм, виконаний з можливістю здійснення оберту в направляючих пазах, пристрій додатково містить ручку-маніпулятор. UA 110384 U (12) UA 110384 U UA 110384 U 5 10 15 20 25 30 35 40 45 50 55 Пристрій, що заявляється, належить до медичної техніки, зокрема до галузі медичного хірургічного інструментарію, і може бути використаний у загальній та невідкладній хірургії, травматології, щелепно-лицевій та військово-польовій хірургії для видалення повністю або частково капсульованих або некапсульованих сторонніх тіл. Відомий інструмент магнітний багатофункціональний для діагностики і видалення металевих феромагнітних сторонніх тіл (Патент на корисну модель № 101226 (UA)), який виконаний з трьох частин і має ручку з насічками, з двох діаметрально протилежних кінців від неї розташовані дві робочі магнітні частини з різними діаметрами. Пристрій дозволяє проводити діагностику та видалення металевих феромагнітних сторонніх тіл. Однак, до недоліків цього пристрою відноситься використання для видалення сторонніх тіл тільки сил магнітного тяжіння, що обмежує його використання при "старих" та капсульованих сторонніх тілах, розташованих у важкодоступних ділянках. Найбільш близьким та вибраним за прототип є пристрій для видалення металевих сторонніх тіл з порожнистих органів, у тому числі з органів шлунково-кишкового тракту (Патент на корисну модель № 100897 (RU)). Пристрій містить корпус, рухомий стрижень, ручку стрижня, тримачі. До корпусу закріплений постійний магніт циліндричної форми. Пристрій містить пастку з ряду дротів виготовлених з немагнітного матеріалу, які кріпляться одним кінцем до верхньої частини рухомого стрижня, а іншим кінцем до корпусу. Дроти розташовані в одній площині, без перекрутів, за рахунок чого знижується ймовірність налипання чужорідного тіла до магніту поверх дротів. На стрижні є по два взаємодіючих між собою фіксатора, за рахунок роботи яких досягається оптимальний перекрут петель. Одним з недоліків цього пристрою є обмеженість його використання у порожнистих органах. Використання цього пристрою у м'яких тканинах призводить до додаткової травматизації м'яких тканин. Крім того, дроти за рахунок своєї гнучкості не дають можливості надійної фіксації сторонніх тіл. Пристрій не дає можливості виконувати пошук металевих сторонніх тіл за рахунок розташування магніту під шаром дротів. В основу корисної моделі поставлено задачу удосконалення пристрою для видалення металевих сторонніх тіл з порожнистих органів, в якому за рахунок зміни конструкції, досягається отримання додаткового механічного впливу, універсальність та надійність при захваті та видаленні феромагнітних металевих сторонніх тіл. Поставлена задача вирішується в пристрої магнітному для вилучення сторонніх тіл, що містить корпус, рухомий стрижень, ручку, тримачі та магніт, згідно з корисною моделлю, рухомий стрижень виконаний у вигляді внутрішньої тяги, робоча частина з магнітом містить ексцентричний затискний механізм, виконаний з можливістю здійснення оберту в направляючих пазах, пристрій додатково містить ручку-маніпулятор. Технічний результат, що досягається при вирішенні задачі, полягає у використанні для видалення металевих феромагнітних сторонніх тіл магніту та обертального ексцентричного затискного механізму, внаслідок чого можлива точна діагностика та фіксація стороннього тіла, а також технологічне поєднання дії сил магнітного тяжіння та механічного затискання в одному пристрої. Пристрій, що заявляється, пояснюють креслення (фіг. 1-2). Пристрій, що заявляється, містить ручку-маніпулятор 1, рухомий стрижень, виконаний у вигляді внутрішньої тяги 2, ручку пристрою 3, шийку пристрою 4 для з'єднання з робочою частиною 5 пристрою. Робоча частина 5 виконана з обертальним ексцентричним затискним механізмом 6 - захвати з можливістю здійснення оберту в ексцентричних направляючих пазах 7. На кінці робочої частини 5 розміщений пошуковий магніт 8. Внутрішня тяга 2 виконана з можливістю обмежено рухатися всередині ручки 1, шийки 4, робочої частини 5 пристрою, внаслідок чого захвати 6, які приєднані до внутрішньої тяги 2, можуть виштовхуватися вперед та зміщуватися зовнішньо або внутрішньо. Ручка 3 пристрою являє собою циліндр діаметром 10 мм та довжиною 80 мм, на яку нанесені насічки для зручності користування та зменшення ковзання інструменту у руці, до якої незнімно прикріплена шийка 4 пристрою, яка являє собою циліндр діаметром 10 мм, довжиною 90 мм. До торця шийки 4 пристрою прикріплена робоча частина 5 у вигляді циліндра діаметром 14 мм, довжиною 30 мм. У центрі дистальної частини незнімно приєднаний магніт 8 розміром діаметром 4 мм, на однаковій відстані від магніту 8 на дистальній частині прорізані два однакових ексцентричних направляючих пази 7. З направляючих пазів виштовхуються два ідентичних захвати 6 довжиною 15 мм, шириною 1 мм, дистальні частини яких округлені на кінцях та мають заточені зубчики для надійної фіксації. Всередині ручки 3, шийки 4 та робочої частини 5 обмежено переміщується внутрішня тяга 2 діаметром 6 мм та довжиною 26,5 см, яка 1 UA 110384 U 5 10 15 20 25 30 35 40 45 50 незмінно приєднана до захватів 6, на кінці якої розташована ручка-маніпулятор 1 довжиною 55 мм, шириною від 3 до 14 мм, товщиною 4 мм. Застосування цього пристрою дозволяє виконувати знаходження, затискання, видалення сторонніх металевих феромагнітних тіл, які розташовані у м'яких тканинах. Перевагою запропонованого пристрою є його адаптованість для надійного захоплення, утримання та видалення сторонніх феромагнітних тіл, багатофункціональність, яка дозволяє одним інструментом здійснювати пошук, надійне видалення металевих феромагнітних сторонніх тіл через рановий канал, контрапертурний або операційний розтин. Робота пристрою здійснюється наступним чином: першим етапом пристрій магнітний з захватом 6 для вилучення сторонніх тіл вводять робочою частиною 5 через рановий отвір, операційний або контрапертурний розтин до місця найбільш вірогідного або попередньо визначеного (за допомогою рентгенологічних або ультразвукових методів дослідження), розташування металевого феромагнітного стороннього тіла. При введенні пристрою захвати 6 знаходиться у зануреному стані в рівень з поверхнею робочої частини 5 та не виступають з неї. Другим етапом після ведення пристрою у м'які тканини здійснюються пошукові рухи пристрою до місця розташування стороннього тіла до моменту спрацювання сил магнітного тяжіння або при контакті магніту 8 зі стороннім тілом, що супроводжується характерним металевим клацанням. Третім етапом висувають внутрішню тягу 2 вперед, захвати 6 виштовхують з робочої частини 5 через ексцентричні направляючі пази 7 та заводять за стороннє тіло. Четвертим етапом повертають ручку-маніпулятор 1, що приводить до переміщення захватів 6 у ексцентричних направляючих пазах 7, які сходяться та щільно фіксують стороннє тіло. П'ятим етапом додатково виділяють стороннє тіло за допомогою допоміжного ріжучого інструменту (ножиці, скальпель) або за рахунок кругових рухів. Шостим етапом виконують плавну поступову тракцію пристрою разом з фіксованим стороннім тілом на себе. Для полегшення видалення стороннього тіла можлива незначна кругова ротація пристрою разом з фіксованим в ньому стороннім тілом навколо осі пристрою. Можливості: пристрій дозволяє затискати стороннє тіло розміром від 3 до 15 мм з глибиною розташування до 15 см як капсульоване, так і некапсульоване та надійно його утримувати; використовувати його при видаленні сторонніх тіл з капсулою або без капсули; використання пристрою сумісно з рентгенологічними та ультразвуковими методами дослідження; видалення сторонніх тіл через рановий канал при його наявності, контрапертурний або проекційний хірургічний розтин. Пристрій в процесі користування не намагнічується сам та не намагнічує допоміжний хірургічний інструмент, легко розкладається, миється та стерилізується, зручний у користуванні. Обмеження застосування: використання пристрою при капсульованих сторонніх тілах можливе тільки сумісно з ріжучим інструментом, який забезпечує доступ до місця розташування стороннього тіла; глибина розташування стороннього тіла більше 15 см; розміри стороннього тіла менше 3 мм або більше 15 мм у перерізі; довжина операційного розтину не менше 15 мм. Запропонованим пристроєм виконане видалення 42 сторонніх тіл: 18 - некапсульованих металевих феромагнітних сторонніх тіл, 14 - капсульованих металевих феромагнітних сторонніх тіл, 5 - металевих неферомагнітніх сторонніх тіл під контролем ультразвукового апарата, 3 металевих неферомагнітніх сторонніх тіл під контролем електронного оптичного перетворювача, 2 - неметалевих сторонніх тіла під контролем електронного оптичного перетворювача. Пристрій показав свою зручність у використанні, надійність, ергономічність у практичній роботі. Можливе використання його як одноосібно, так і в поєднані з іншим хірургічним інструментарієм. Ускладнень, негативних явищ, які пов'язані з використанням запропонованого пристрою, не спостерігалося. Пристрій, що заявляється, був апробований на базі хірургічного відділення клініки торакоабдомінальної хірургії Військово-медичного клінічного Центру Північного регіону МО України. Отримані позитивні результати дають підстави рекомендувати цей пристрій для широкого практичного застосування. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 55 Пристрій магнітний для вилучення сторонніх тіл, що містить ручку, рухомий стрижень, тримачі та магніт, який відрізняється тим, що рухомий стрижень виконаний у вигляді внутрішньої тяги, робоча частина з магнітом містить ексцентричний затискний механізм, виконаний з можливістю здійснення оберту в направляючих пазах, пристрій додатково містить ручку-маніпулятор. 2 UA 110384 U Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюLurin Ihor Anatoliiovych, Mykhailusov Rostyslav Mykolaiovych
Автори російськоюЛурин Игорь Анатольевич, Михайлусов Ростислав Николаевич
МПК / Мітки
МПК: A61B 17/3205
Мітки: магнітний, сторонніх, пристрій, вилучення, тіл
Код посилання
<a href="https://ua.patents.su/5-110384-pristrijj-magnitnijj-dlya-viluchennya-storonnikh-til.html" target="_blank" rel="follow" title="База патентів України">Пристрій магнітний для вилучення сторонніх тіл</a>
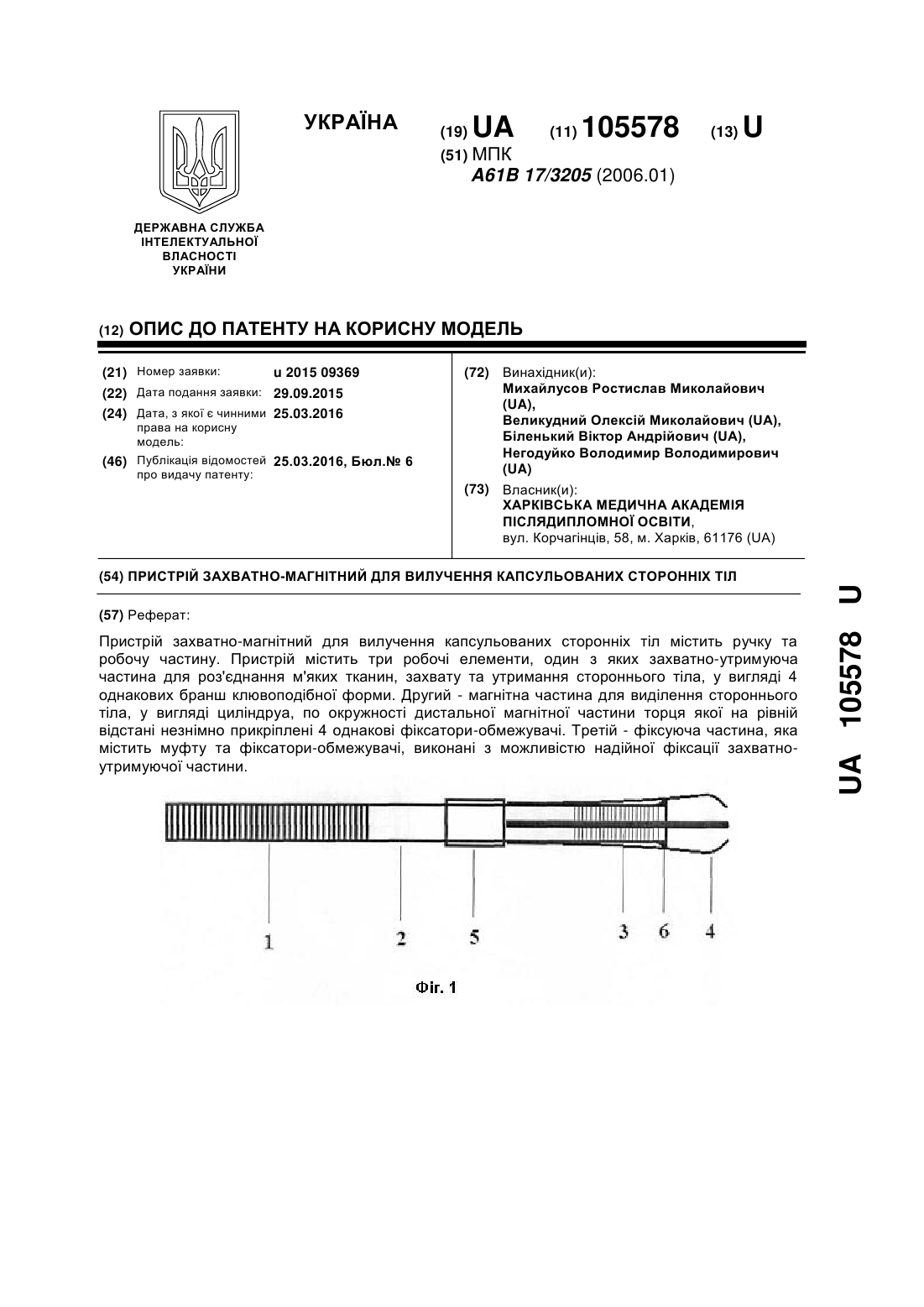
Пристрій захватно-магнітний для вилучення капсульованих сторонніх тіл
Номер патенту: 105578
Опубліковано: 25.03.2016
Автори: Біленький Віктор Андрійович, Великодний Олексій Миколайович, Негодуйко Володимир Володимирович, Михайлусов Ростислав Миколайович
МПК: A61B 17/3205
Мітки: тіл, вилучення, пристрій, захватно-магнітний, капсулованих, сторонніх
Формула / Реферат:
Пристрій захватно-магнітний для вилучення капсульованих сторонніх тіл, що містить ручку та робочу частину, який відрізняється тим, що пристрій містить три робочі елементи, один з яких захватно-утримуюча частина для роз'єднання м'яких тканин, захвату та утримання стороннього тіла, у вигляді 4 однакових бранш клювоподібної форми, другий - магнітна частина для виділення стороннього тіла, у вигляді циліндра, по окружності дистальної магнітної...
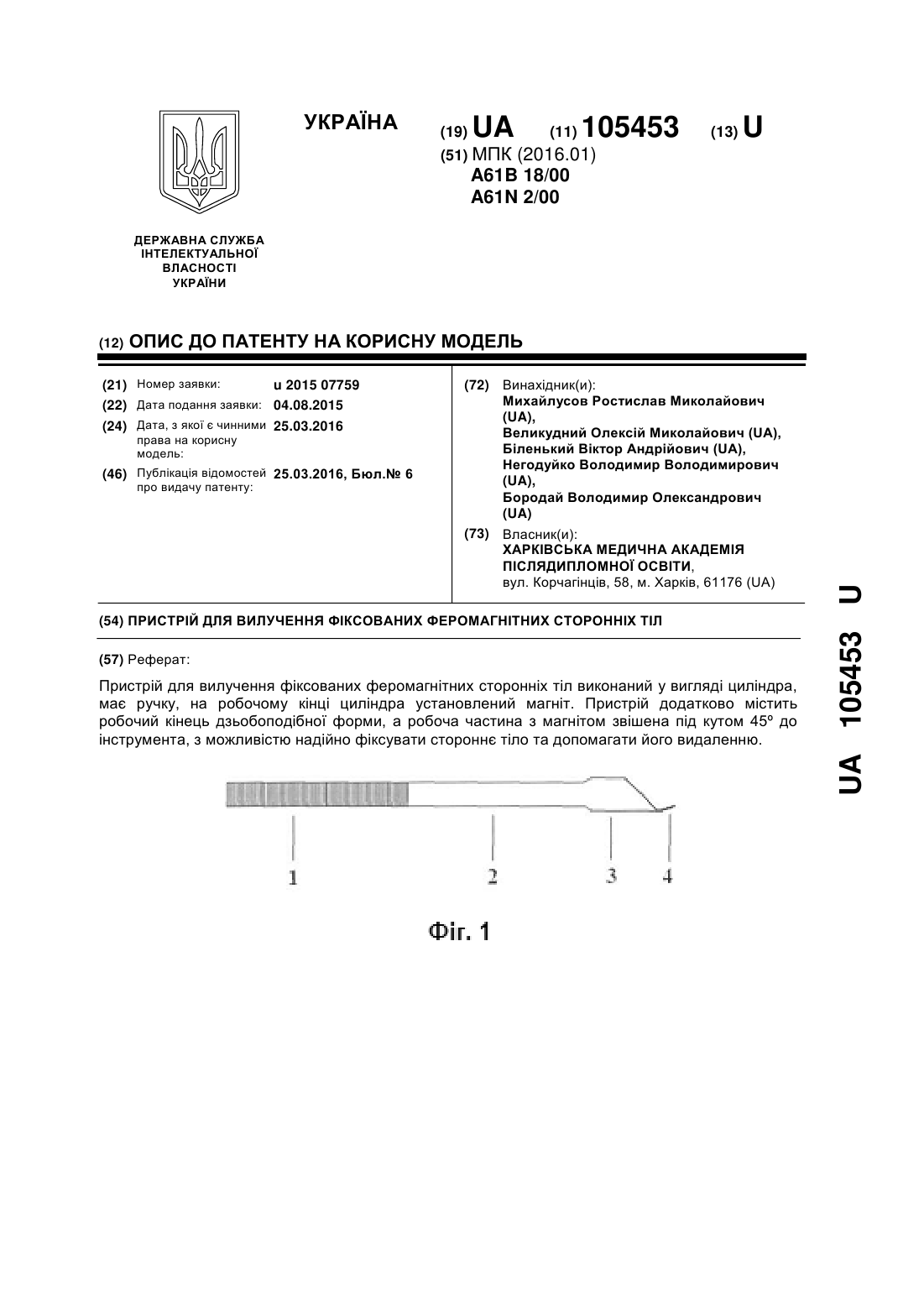
Пристрій для вилучення фіксованих феромагнітних сторонніх тіл
Номер патенту: 105453
Опубліковано: 25.03.2016
Автори: Біленький Віктор Андрійович, Негодуйко Володимир Володимирович, Михайлусов Ростислав Миколайович, Великодний Олексій Миколайович, Бородай Володимир Олександрович
МПК: A61B 18/00, A61N 2/00
Мітки: феромагнітних, вилучення, тіл, фіксованих, сторонніх, пристрій
Формула / Реферат:
Пристрій для вилучення фіксованих феромагнітних сторонніх тіл, який виконаний у вигляді циліндра, має ручку, на робочому кінці циліндра установлений магніт, який відрізняється тим, що пристрій додатково містить робочий кінець дзьобоподібної форми, а робоча частина з магнітом звішена під кутом 45º до інструмента, з можливістю надійно фіксувати стороннє тіло та допомагати його видаленню.
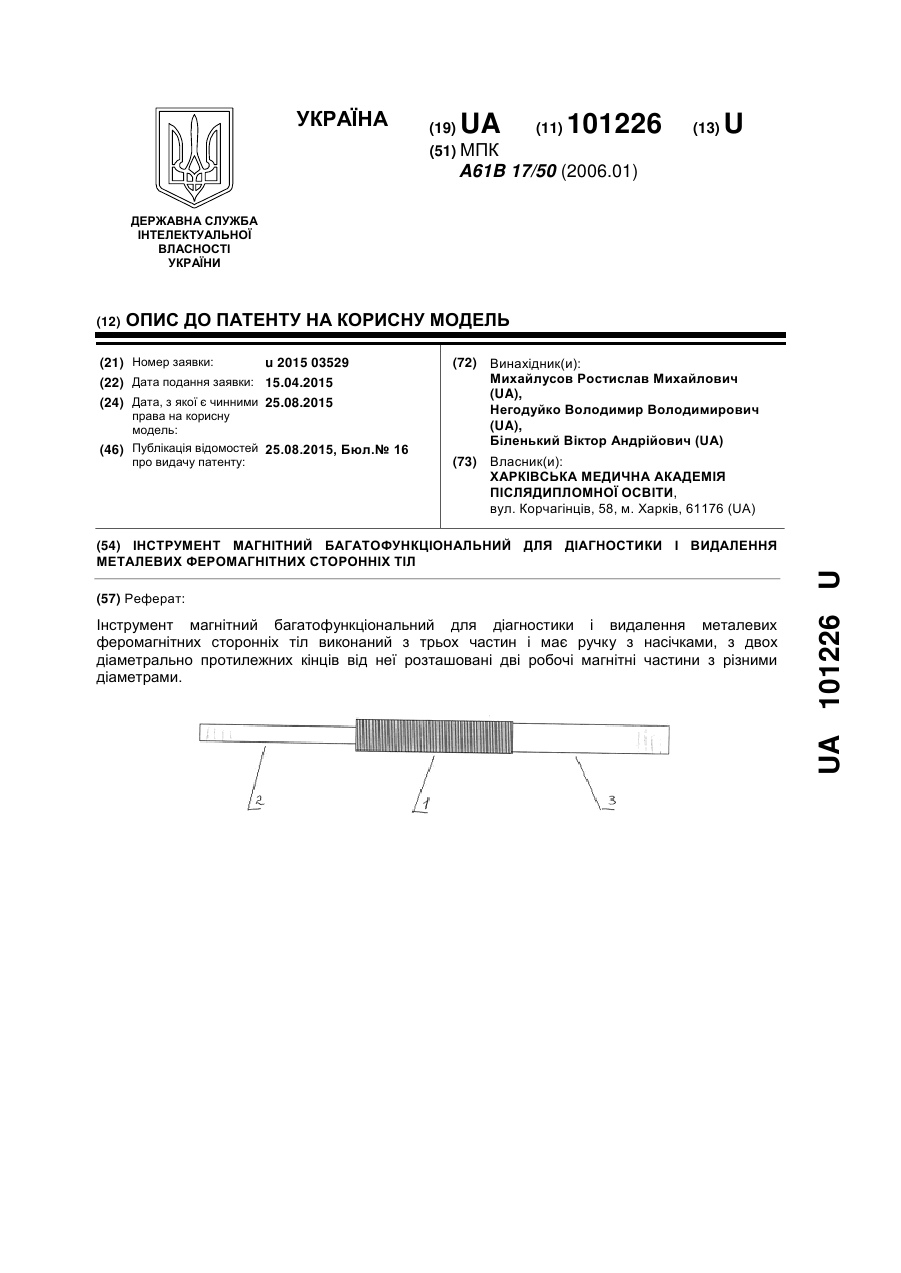
Інструмент магнітний багатофункціональний для діагностики і видалення металевих феромагнітних сторонніх тіл
Номер патенту: 101226
Опубліковано: 25.08.2015
Автори: Михайлусов Ростислав Михайлович, Біленький Віктор Андрійович, Негодуйко Володимир Володимирович
МПК: A61B 17/50
Мітки: сторонніх, магнітний, інструмент, видалення, феромагнітних, металевих, багатофункціональний, тіл, діагностики
Формула / Реферат:
Інструмент магнітний багатофункціональний для діагностики і видалення металевих феромагнітних сторонніх тіл, що виконаний з трьох частин, який відрізняється тим, що інструмент має ручку з насічками, з двох діаметрально протилежних кінців від неї розташовані дві робочі магнітні частини з різними діаметрами.
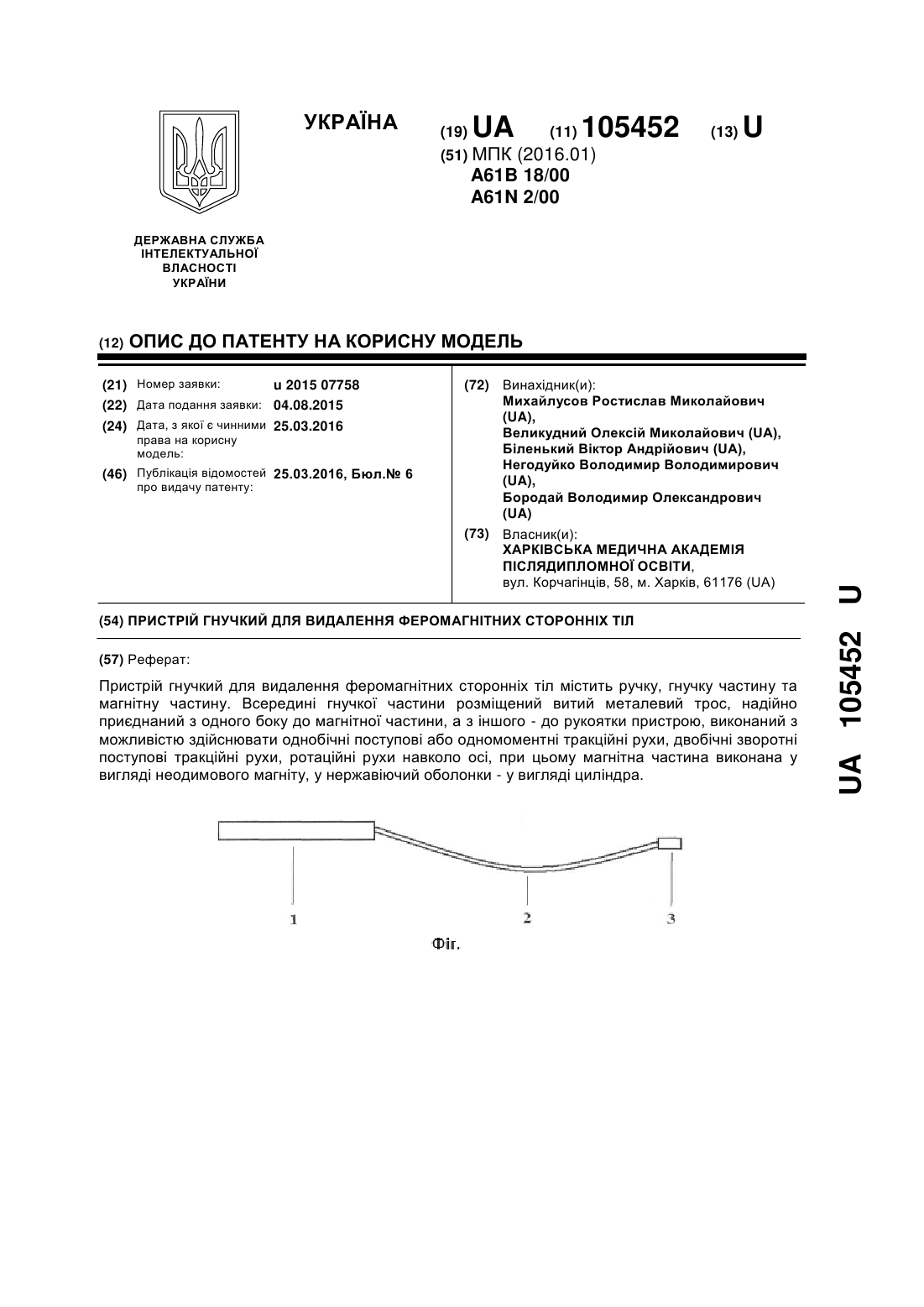
Пристрій гнучкий для видалення феромагнітних сторонніх тіл
Номер патенту: 105452
Опубліковано: 25.03.2016
Автори: Негодуйко Володимир Володимирович, Бородай Володимир Олександрович, Біленький Віктор Андрійович, Великодний Олексій Миколайович, Михайлусов Ростислав Миколайович
МПК: A61N 2/00, A61B 18/00
Мітки: сторонніх, феромагнітних, тіл, видалення, пристрій, гнучкий
Формула / Реферат:
Пристрій гнучкий для видалення феромагнітних сторонніх тіл, що містить ручку, гнучку частину та магнітну частину, який відрізняється тим, що всередині гнучкої частини розміщений витий металевий трос, надійно приєднаний з одного боку до магнітної частини, а з іншого - до рукоятки пристрою, виконаний з можливістю здійснювати однобічні поступові або одномоментні тракційні рухи, двобічні зворотні поступові тракційні рухи, ротаційні рухи навколо...
Пристрій для виявлення сторонніх тіл в матеріалі, що збирається сільськогосподарською збиральною машиною
Номер патенту: 39401
Опубліковано: 25.02.2009
Автори: Лозін Андрій Афонійович, Биков Олександр Болеславович
МПК: A01D 75/00
Мітки: машиною, пристрій, тіл, виявлення, збиральною, сторонніх, матеріали, збирається, сільськогосподарською
Формула / Реферат:
Пристрій для виявлення сторонніх тіл у матеріалі, що збирається сільськогосподарською збиральною машиною, який містить металодетектор, що включає датчик металевих предметів і блок збору та оброблення даних, датчик механічної реакції від матеріалу, що включає акселерометр, який з'єднаний з ущільнюючим елементом, що обертається, транспортуючого вузла сільськогосподарської збиральної машини, причому акселерометр установлений з можливістю...
Попередній патент: Спосіб топічної діагностики інфекцій сечової системи у дітей
Наступний патент: Пристрій для тарування колеса залізничного рухомого складу
Випадковий патент: Пристрій для змішування порошкових матеріалів з безступінчастим приводом