Спосіб управління рухами голуба
Номер патенту: 110713
Опубліковано: 10.02.2016
Автори: Каневський Валерій Олександрович, Григоров Олексій Олегович, Тукаленко Євген Валерійович
Формула / Реферат
Спосіб управління рухами голуба і керування його переміщенням у просторі, що передбачає електростимуляцію глибинних структур мозку, який відрізняється тим, що з метою активації певних рухів тварини стимулюються глибинні ділянки мозку, до складу яких входить: сукупність структур Nucleus mesencephalicus lateralis pars dorsalis (MLd), Nucleus intracollicularis (ICo), Substantia grisea centralis (GCt), Radix mesencephalicus nervi trigemini (RxVM) - для рухів вперед на землі та зльоту; або сукупність структур: Substantia nigra, pars compacta (SNc), Tractus occipitomesencephalicus (OM), Formatio reticularis lateralis mesencephali (FRL) - для іпсілатеральних поворотів ліворуч або праворуч; або сукупність структур: Nucleus reticularis gigantocellularis (Rgc), Nucleus reticularis parvocellularis (Rpc), Nucleus centralis medullae oblongatae pars dorsalis (Cnd) - для іпсілатеральних поворотів ліворуч або праворуч; або сукупність структур Stratum opticum (SOp), Nucleus radix optici basalis (nBOR), Area ventralis tegmenti (AVT) - для іпсілатеральних поворотів ліворуч або праворуч.
Текст
Реферат: Винахід належить до способу управління рухами голуба і керування його переміщенням у просторі, що передбачає електростимуляцію глибинних структур мозку, в якому з метою активації певних рухів тварини стимулюються глибинні ділянки мозку, до складу яких входить: сукупність структур Nucleus mesencephalicus lateralis pars dorsalis (MLd), Nucleus intracollicularis (ICo), Substantia grisea centralis (GCt), Radix mesencephalicus nervi trigemini (RxVM) - для рухів вперед на землі та зльоту; або сукупність структур: Substantia nigra, pars compacta (SNc), UA 110713 C2 (12) UA 110713 C2 Tractus occipitomesencephalicus (OM), Formatio reticularis lateralis mesencephali (FRL) - для іпсілатеральних поворотів ліворуч або праворуч; або сукупність структур: Nucleus reticularis gigantocellularis (Rgc), Nucleus reticularis parvocellularis (Rpc), Nucleus centralis medullae oblongatae pars dorsalis (Cnd) - для іпсілатеральних поворотів ліворуч або праворуч; або сукупність структур Stratum opticum (SOp), Nucleus radix optici basalis (nBOR), Area ventralis tegmenti (AVT) - для іпсілатеральних поворотів ліворуч або праворуч. UA 110713 C2 5 10 15 20 25 30 35 40 45 50 55 Розробка загалом належить до нейрофізіології і біоробототехніки, а саме до систем контролю рухів тварин і керованого їх переміщення у просторі за допомогою електростимуляції їх мозку. Розробка може бути застосована для вирішення задач моніторингу навколишнього середовища в екстремальних умовах, зокрема для обстеження території при ліквідації наслідків аварій і катастроф, а також доставки корисного вантажу тощо. Відомі аналоги запропонованого нами способу: 1) Відомий спосіб управління рухами голуба шляхом електричної стимуляції його мозку за допомогою дистанційно керованого стимулятора. Дуже неповне і стисле описання цього способу наводиться лише в одній науковій публікації [Н. Wang, R. Huai, J. Yang, X. Su Review of research progress in biorobot // Advanced Materials Research Vols. 655-657 (2013) pp 1061-1065]. Згідно зі статтею, дослідники використовували стимуляцію ділянок мозку птаха, які є аналогічними до заднього вентролатерального таламічного ядра та мигдалини у ссавців, при цьому можна дійти висновку, що такий спосіб дистанційного керування рухами голуба може бути реалізованим лише у закритих приміщеннях невеликої площі, оскільки висота польоту таких птахів з електродами є нижчою, ніж до імплантації електродів, а також тому що радіозв'язок зі стимулятором можливий лише на невеликій відстані. Автори відзначають необхідність подальшого розвитку моделі дистанційно керованого голуба: як біологічного модуля системи, так і електронного. Отже, головним недоліком такого способу є низька ефективність способу, а саме неможливість його використання на відкритій місцевості. 2) Відомі способи ініціації певних рухових реакцій тварин (котів, мавп, биків) через електричну стимуляцію їх мозку [J.M.R. Delgado "Physical control of the mind", New York: Harper and Row, 1969]. Головними недоліками описаних способів є низька їх ефективність, неможливість їх використання для контрольованого переміщення тварин у просторі. 3) Відомі способи управління рухами щура "Method and apparatus for guiding movement of a freely roaming animal through brain stimulation", патент US20030199944 A1 (також опубліковано як WO 2003066158 A2; CA2475546A1, EP1471971A2, EP1471971A4, US7970476, WO2003066158A3) і "Teleoperation of a freely roaming animal through brain stimulation" патент WO 2005112216 A2 (також опубліковано як СА2563308А1, EP1735048A2, EP1735048A4, US20090044761, US20130098310, WO2005112216A3). Способи основані на використанні стимуляції передньомозкового пучка, який знаходиться у проміжному мозку щурів та є частиною системи позитивного підкріплення для руху щура вперед, а також стимуляції нервових ядер у корі мозку щурів, які є частиною тактильного аналізатора і являють собою ділянку кори головного мозку, яка відповідає за обробку чутливої інформації з рецепторів вібрисів щурів. Тварини швидко навчилися пов'язувати отримання віртуальних "тактильних" стимулів (у лівій або правій соматосенсорній корі) з напрямком, в який вони повинні повернути (ліворуч або праворуч), в результаті отримання потужного підкріплення: якщо вони повертали в правильному напрямку після коркового стимулу, вони негайно отримували електричний стимул в ділянку передньомозкового пучка, збудження якої призводило до отримання задоволення. Використовуючи цю парадигму навчання, віддалений оператор був здатен навчити щурів, які вільно пересуваються на місцевості, долати різні перешкоди, розташовані в лабораторії або на вулиці. Недоліками цих способів є: 1) Необхідність тренувань для кожної робочої тварини протягом тривалого часу для її навчання; 2) Неможливість передбачити ефективність таких систем в реальних складних умовах, оскільки зовнішні стресові фактори можуть значною мірою нівелювати реакції, основані на тренуванні і умовних рефлексах. 3) Відомий спосіб управління рухами щура [Саркисова К.Ю., Новикова М.Р., Зайченко М.И. и др… "Дистанционное управление целенаправленным поведением свободно передвигающихся крыс посредством телестимуляции подкрепляющих структур мозга", Журн. ВНД, 2010, т.60, №2, с.236-246]. Спосіб, як і попередній описаний вище, оснований на поєднанні спеціального навчання щурів з електростимуляцією їх мозку. Розробники використовували стимуляцію передньомозкового пучка як потужне позитивне підкріплення і навчали тварин постійно шукати "правильний" напрямок руху: якщо тварина вибирала напрямок руху, який був необхідний оператору, вона отримувала позитивне підкріплення, якщо напрямок руху був невірний, підкріплення не було. Таким чином через декілька тижнів тренування щури навчались 1 UA 110713 C2 5 10 15 20 25 30 35 40 45 50 55 проходити необхідним для оператора маршрутом, долаючи на маршруті певні перешкоди. Головними недоліками цього способу є: 1) Необхідність тренувань для кожної робочої тварини протягом тривалого часу для її навчання; 2) Повільна швидкість рухів робочої тварини через постійний пошук нею "правильного" напрямку руху з позитивним підкріпленням; 3) Неможливість передбачити ефективність таких систем в реальних складних умовах, оскільки зовнішні стресові фактори можуть значною мірою нівелювати реакції, основані на тренуванні і умовних рефлексах. Опис способу. Задачею розробки є створення нового способу управління рухами голуба і керування його переміщенням у просторі, який передбачає електричну стимуляцію глибоких ділянок мозку голуба, що викликає певні стабільні моторні реакції тварини без будь-якого попереднього її тренування. Для цього за допомогою стереотаксичного хірургічного методу в певні ділянки мозку дорослої живої тварини імплантуються електроди 150-200 мкм завтовшки. Для управління рухом тварини імплантовані електроди поєднуються зі спеціально розробленим дистанційно керованим мікростимулятором, який розміщується на спині тварини. Оператор за допомогою спеціально розробленого програмного забезпечення має змогу формувати на персональному комп'ютері і посилати на мікростимулятор команди за допомогою радіозв'язку на базі Zig-Bee чи GSM протоколів комунікації. Мікростимулятор трансформує отримані команди в серії електричних імпульсів, які надсилає на певний електрод, імплантований в мозок тварини. Електричні імпульси, які надходять через електрод, стимулюють певну ділянку мозку, що, в свою чергу, викликає необхідну оператору моторну реакцію тварини. Параметри електричних імпульсів, що використовуються для стимуляції ділянок мозку: серія прямокутних імпульсів негативної полярності частотою 50-120 Гц, амплітудою 1-3,5 В чи 20-150 мкА; тривалість кожного імпульсу 0,4-1,0 мс. Новим в способі є те, що для керування рухами голуба: Стимулюються глибокі ділянки мозку голуба, що викликає незалежні стабільні моторні реакції без будь-якого попереднього тренування. Такі реакції значно стабільніші, ніж основані на навчанні і умовних рефлексах, призводять до негайних швидких моторних відповідей, і вплив зовнішніх чинників на ефективність цих реакцій стає значно меншим. Більше того, відсутність попереднього тренування робить процес створення робочих голубів і керування їх рухами дешевшим і набагато коротшим; Стимулюються глибокі ділянки мозку, до складу яких входять: Nucleus mesencephalicus lateralis pars dorsalis (MLd), Nucleus intracollicularis (ICo), Substantia grisea centralis (GCt), Radix mesencephalicus nervi trigemini (RxVM), Substantia nigra, pars compacta (SNc), Tractus occipitomesencephalicus (OM), Formatio reticularis lateralis mesencephali (FRL), Nucleus reticularis gigantocellularis (Rgc), Nucleus reticularis parvocellularis (Rpc), Nucleus centralis medullae oblongatae pars dorsalis (Cnd), Stratum opticum (SOp), Nucleus radix optici basalis (nBOR), Area ventral is tegmenti (AVT); для виконання голубом команди "хода вперед" або "зліт та політ вперед" проводиться електростимуляція глибинної ділянки мозку, до складу якої входить сукупність структур: MLd, ICo, GCt, RxVM; для виконання голубом на землі або у повітрі команди "поворот ліворуч" чи "поворот праворуч" проводиться іпсілатеральна електростимуляція глибинної ділянки мозку, до складу якої входять сукупність структур: SNc, OM, FRL; або сукупність структур: Rgc, Rpc, Cnd; або сукупність структур SOp, nBOR, AVT. Запропонований спосіб пояснюється прикладом: За наведеним вище описом способу голубу було імплантовано в мозок вісім електродів, що були поєднані з роз'ємом. Після підключення до роз'єму мікростимулятора голуб тестувався у приміщенні та на відкритій місцевості. Птах, який був контрольований оператором дистанційно, був здатен проходити на землі складний лабіринт за заздалегідь визначеним маршрутом, а також злітати за командою оператора та виконувати маневрування у повітрі (повороти праворуч та ліворуч, політ у визначеному напрямку). ФОРМУЛА ВИНАХОДУ 60 Спосіб управління рухами голуба і керування його переміщенням у просторі, що передбачає електростимуляцію глибинних структур мозку, який відрізняється тим, що з метою активації 2 UA 110713 C2 5 10 певних рухів тварини стимулюються глибинні ділянки мозку, до складу яких входить: сукупність структур Nucleus mesencephalicus lateralis pars dorsalis (MLd), Nucleus intracollicularis (ICo), Substantia grisea centralis (GCt), Radix mesencephalicus nervi trigemini (RxVM) - для рухів вперед на землі та зльоту; або сукупність структур: Substantia nigra, pars compacta (SNc), Tractus occipitomesencephalicus (OM), Formatio reticularis lateralis mesencephali (FRL) - для іпсілатеральних поворотів ліворуч або праворуч; або сукупність структур: Nucleus reticularis gigantocellularis (Rgc), Nucleus reticularis parvocellularis (Rpc), Nucleus centralis medullae oblongatae pars dorsalis (Cnd) - для іпсілатеральних поворотів ліворуч або праворуч; або сукупність структур Stratum opticum (SOp), Nucleus radix optici basalis (nBOR), Area ventralis tegmenti (AVT) - для іпсілатеральних поворотів ліворуч або праворуч. Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюKanevskyi Valerii Oleksandrovych
Автори російськоюКаневский Валерий Александрович
МПК / Мітки
МПК: A01K 35/00, G05D 3/00, G08C 17/02, A01K 15/00
Мітки: спосіб, управління, голуба, рухами
Код посилання
<a href="https://ua.patents.su/5-110713-sposib-upravlinnya-rukhami-goluba.html" target="_blank" rel="follow" title="База патентів України">Спосіб управління рухами голуба</a>
Спосіб управління рухами щура
Номер патенту: 110712
Опубліковано: 10.02.2016
Автори: Тукаленко Євген Валерійович, Каневський Валерій Олександрович, Григоров Олексій Олегович
МПК: G08C 17/02, G05D 3/00, A01K 15/00
Мітки: щура, рухами, управління, спосіб
Формула / Реферат:
Спосіб управління рухами щура і керування його переміщенням у просторі, що передбачає електростимуляцію глибинних структур мозку, який відрізняється тим, що з метою активації певних рухів тварини стимулюють глибинні структури мозку, до складу яких входить: сукупність ядер cuneiform nucleus (CnF), deep mesencephalic nucleus (DpMe), mesencephalic trigeminal nucleus (Me5), microccllular tegmental nucleus (MiTg) - для ініціації швидкого бігу та...
Спосіб керування рухами людини
Номер патенту: 41795
Опубліковано: 10.06.2009
Автори: Шевченко Анатолій Борисович, Горбаньов Володимир Миколайович, Іванов Валентин Володимирович, Алєєв Леонид Седекович, Вовк Майя Іванівна
МПК: A61N 1/36
Мітки: людини, рухами, керування, спосіб
Формула / Реферат:
Спосіб керування рухами людини шляхом стимуляції вибраного нервово-м'язового комплексу людини електричними сигналами, які керуються по одному або декількох параметрах сигналами біоелектричної активності, який відрізняється тим, що сигнали біоелектричної активності відводять з рухових одиниць м'язів тієї ж людини, функціонально не завантажених під час електростимуляції, переважно з м'язів, симетричних тим, скороченнями яких керують.
Спосіб керування роботою машини із коливними рухами робочих органів
Номер патенту: 10971
Опубліковано: 15.12.2005
Автори: Чубик Роман Васильович, Пашистий Вадим Ананієвич, Берник Павло Степанович
МПК: B65G 27/10
Мітки: органів, робочих, коливними, спосіб, керування, машини, рухами, роботою
Формула / Реферат:
1. Спосіб керування роботою машин з коливними рухами робочих органів, при якому за допомогою системи керування приводом відслідковують власну частоту коливань механічної системи, підтримуючи режим роботи машини близьким до резонансного, який відрізняється тим, що в процесі роботи машини через систему керування безперервно контролюють два параметри - частоту та амплітуду коливань робочого органа, і у випадку зміни завантаження робочого органа...
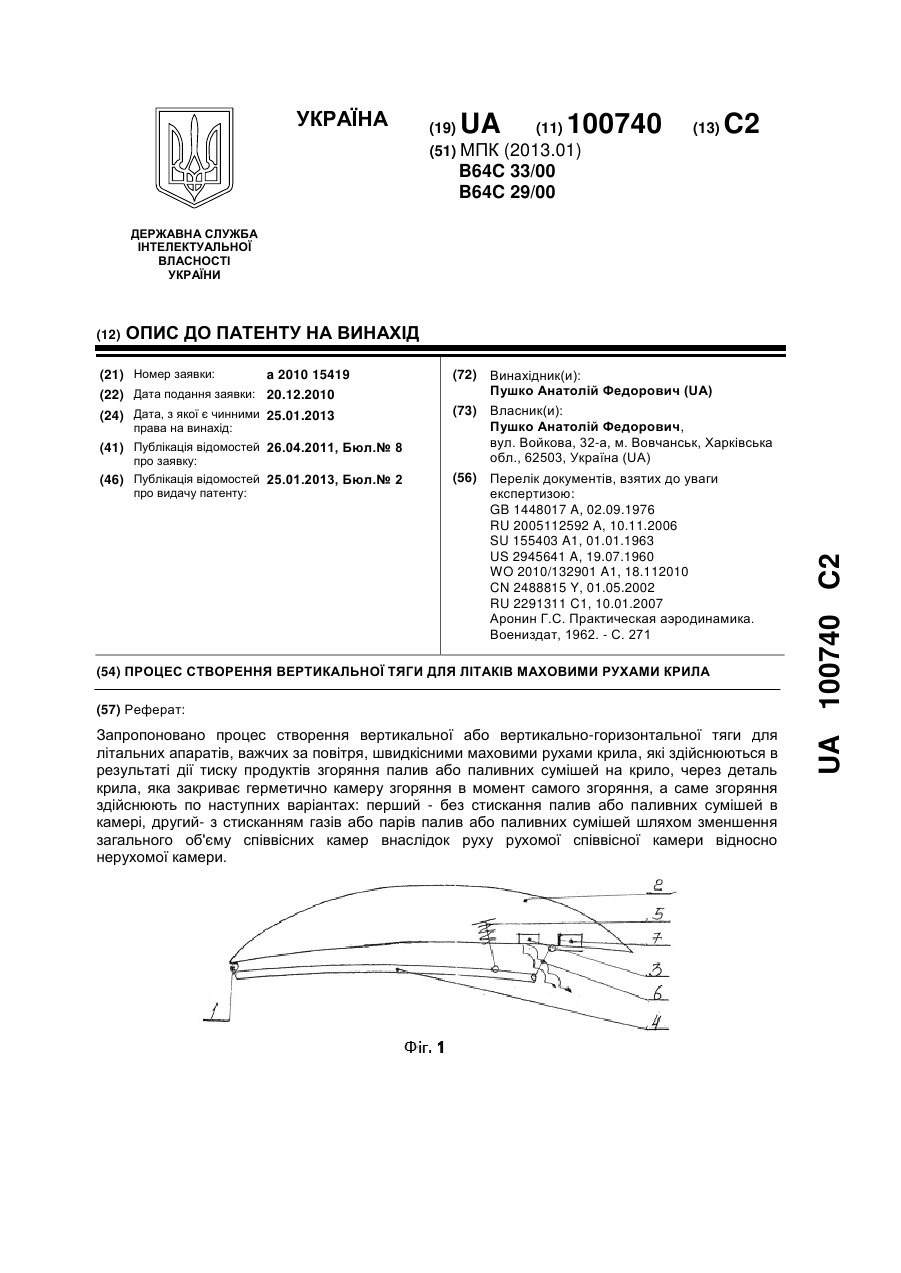
Процес створення вертикальної тяги для літаків маховими рухами крила
Номер патенту: 100740
Опубліковано: 25.01.2013
Автор: Пушко Анатолій Федорович
МПК: B64C 29/00, B64C 33/00
Мітки: вертикальної, рухами, літаків, створення, крила, процес, тяги, маховими
Формула / Реферат:
1. Процес створення вертикальної або вертикально-горизонтальної тяги для літальних апаратів, важчих за повітря, швидкісними маховими рухами крила, які здійснюють в результаті дії тиску продуктів згоряння палив або паливних сумішей на крило, через деталь крила, яка закриває герметично камеру згоряння в момент самого згоряння, а саме згоряння здійснюють по наступних варіантах: перший - без стискання палив або паливних сумішей в камері, другий...
Імпульсний модулятор голуба
Номер патенту: 87966
Опубліковано: 25.02.2014
Автор: Голуб Владислав Сергійович
МПК: H03K 3/023, H03K 5/02
Мітки: голуба, модулятор, імпульсний
Формула / Реферат:
1. Імпульсний модулятор, що містить суматор, перший вхід якого є входом модулятора, а другий є входом негативного зворотного зв'язку й підключений до виходу модулятора, коло інтегрування та компарування, вхід якого підключений до виходу суматора, та формувач імпульсів, вхід якого підключений до виходу кола інтегрування та компарування, а вихід є виходом модулятора, який відрізняється тим, що коло є з двома порогами компарування й двома...
Попередній патент: Спосіб управління рухами щура
Наступний патент: Система для виводу бджолиних маток, отримання маточного молочка, транспортування бджолиних яєць і личинок
Випадковий патент: Очисник головок коренеплодів від залишків гички