Спосіб управління рухами щура
Номер патенту: 110712
Опубліковано: 10.02.2016
Автори: Каневський Валерій Олександрович, Григоров Олексій Олегович, Тукаленко Євген Валерійович

Формула / Реферат
Спосіб управління рухами щура і керування його переміщенням у просторі, що передбачає електростимуляцію глибинних структур мозку, який відрізняється тим, що з метою активації певних рухів тварини стимулюють глибинні структури мозку, до складу яких входить: сукупність ядер cuneiform nucleus (CnF), deep mesencephalic nucleus (DpMe), mesencephalic trigeminal nucleus (Me5), microccllular tegmental nucleus (MiTg) - для ініціації швидкого бігу та стрибків щура; або сукупність ядер ventrolaieral tegmental area (VLTg), poiulne reticular nucleus, oral part (PnO), reticulolegmcntal nucleus of the pons (Rt Igj, pedunculopoiuinc legniental nucleus (PPTg) - для виконання щуром іпсілатеральних поворотів ліворуч або праворуч; або зона lateral hypothalamic area (LH) - для ініціації ходи чи нешвидкого бігу щура; або ядро bed nucleus of the stria terminalis, medial division (RSTM) - для ініціації пошукової поведінки щура (рух у довільному напрямку, обстеження території).
Текст
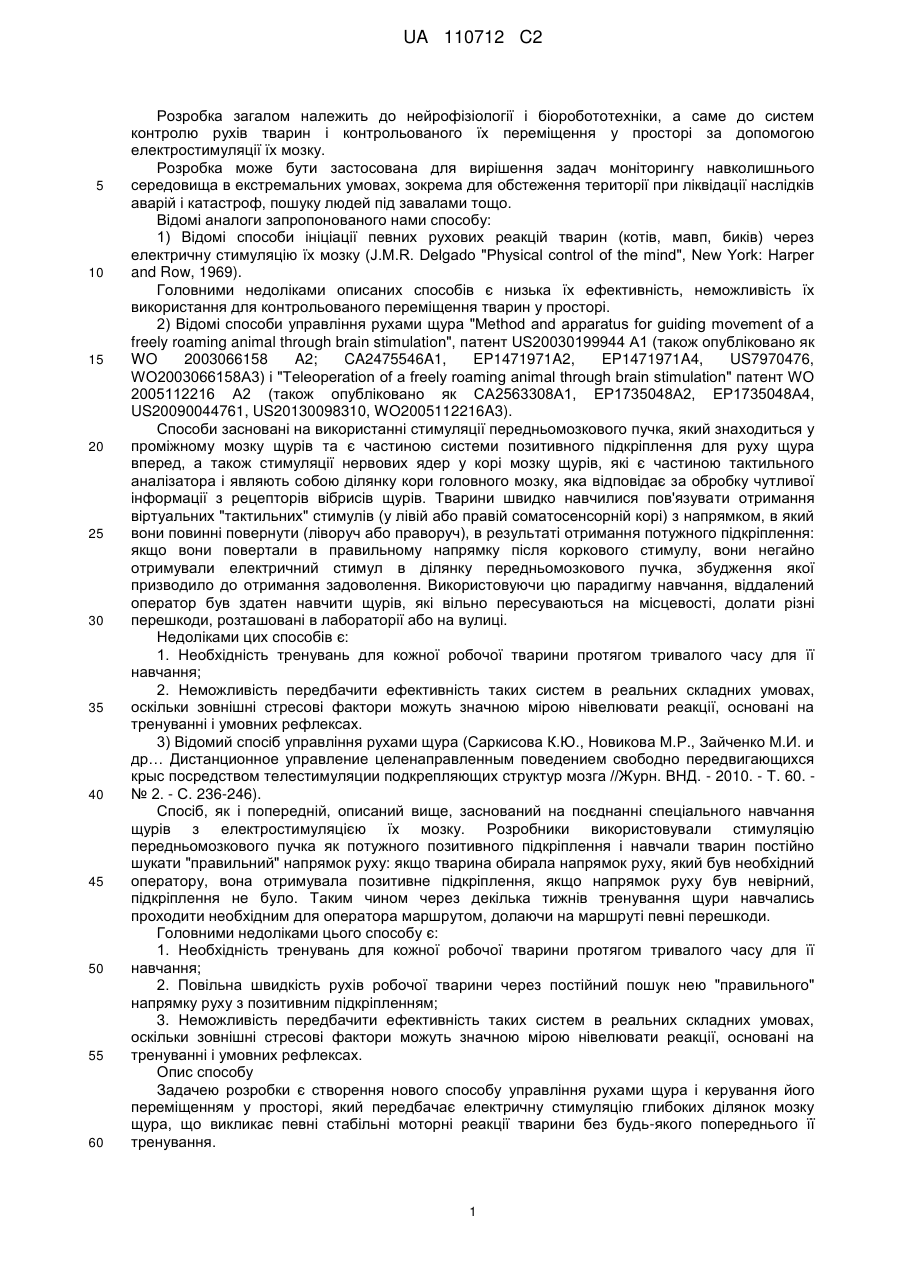
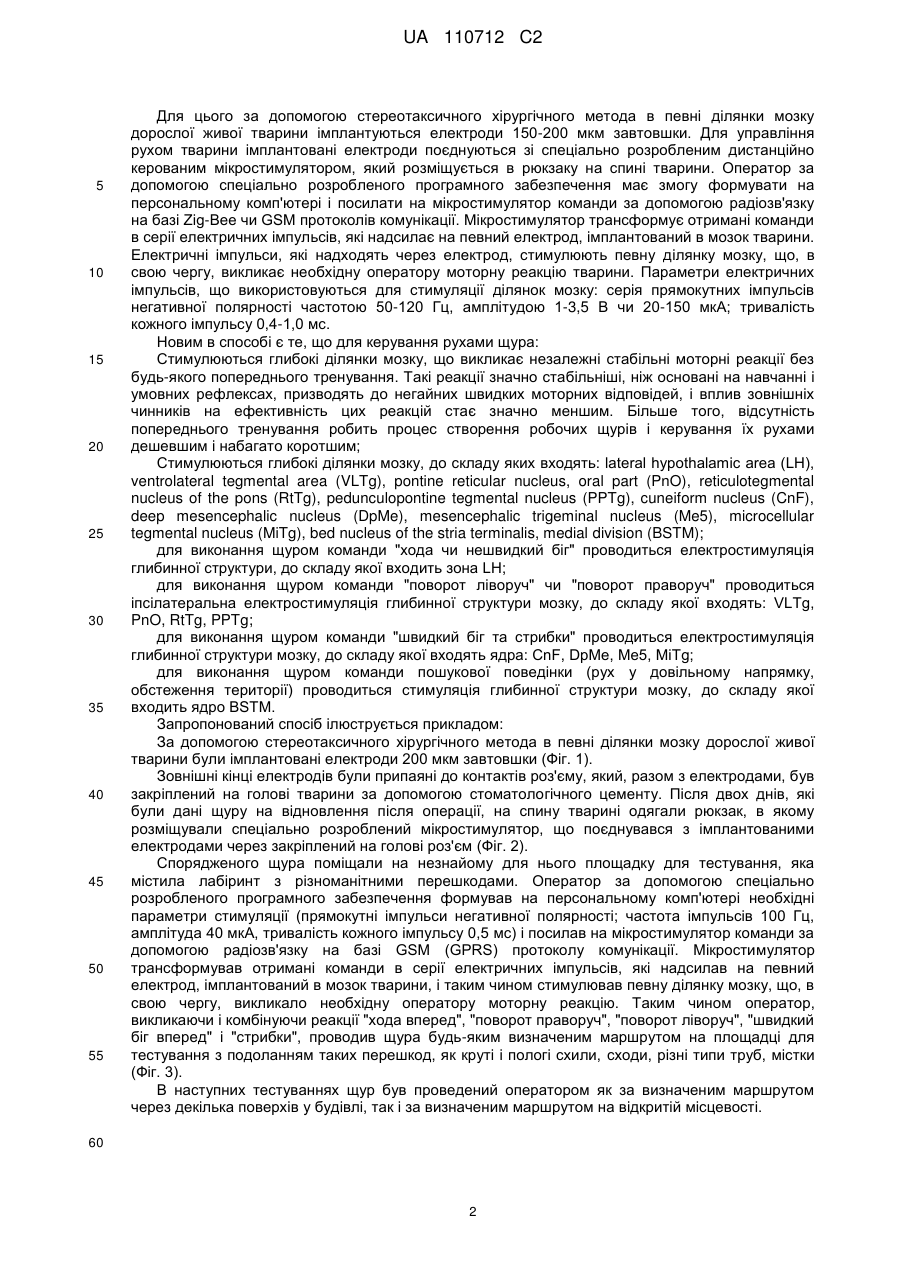
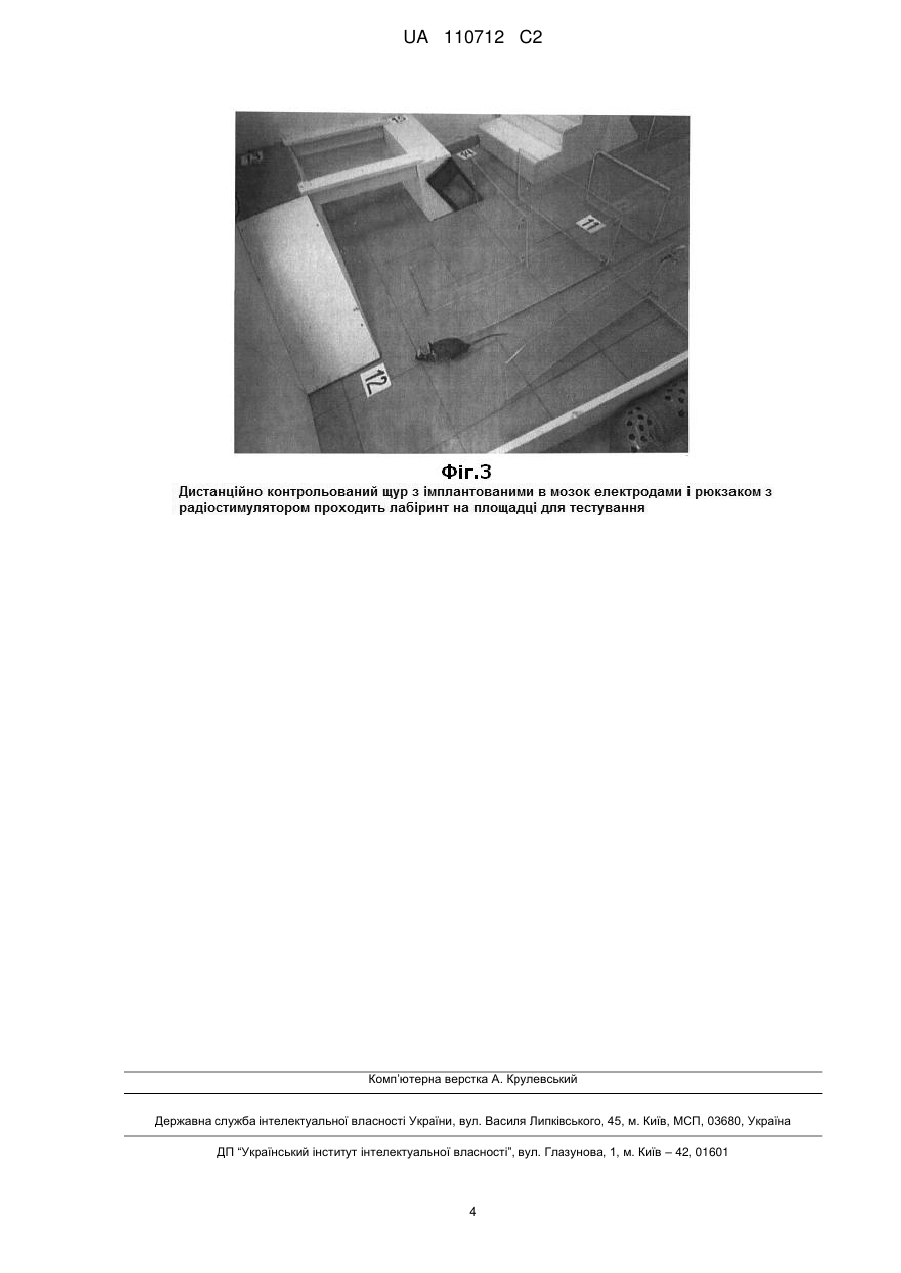
Реферат: Винахід належить до способу управління рухами щура і керування його переміщенням у просторі, що передбачає електростимуляцію глибинних структур мозку, в якому з метою активації певних рухів тварини стимулюють глибинні структури мозку, до складу яких входить: сукупність ядер cuneiform nucleus (CnF), deep mesencephalic nucleus (DpMe), mesencephalic trigeminal nucleus (Me5), microccllular tegmental nucleus (MiTg) - для ініціації швидкого бігу та стрибків щура; або сукупність ядер ventrolaieral tegmental area (VLTg), poiulne reticular nucleus, oral part (PnO), reticulolegmcntal nucleus of the pons (Rt Igj, pedunculopoiuinc legniental nucleus (PPTg) - для виконання щуром іпсілатеральних поворотів ліворуч або праворуч; або зона lateral hypothalamic area (LH) - для ініціації ходи чи нешвидкого бігу щура; або ядро bed nucleus of the stria terminalis, medial division (RSTM) - для ініціації пошукової поведінки щура (рух у довільному напрямку, обстеження території). UA 110712 C2 (12) UA 110712 C2 UA 110712 C2 5 10 15 20 25 30 35 40 45 50 55 60 Розробка загалом належить до нейрофізіології і біоробототехніки, а саме до систем контролю рухів тварин і контрольованого їх переміщення у просторі за допомогою електростимуляції їх мозку. Розробка може бути застосована для вирішення задач моніторингу навколишнього середовища в екстремальних умовах, зокрема для обстеження території при ліквідації наслідків аварій і катастроф, пошуку людей під завалами тощо. Відомі аналоги запропонованого нами способу: 1) Відомі способи ініціації певних рухових реакцій тварин (котів, мавп, биків) через електричну стимуляцію їх мозку (J.M.R. Delgado "Physical control of the mind", New York: Harper and Row, 1969). Головними недоліками описаних способів є низька їх ефективність, неможливість їх використання для контрольованого переміщення тварин у просторі. 2) Відомі способи управління рухами щура "Method and apparatus for guiding movement of a freely roaming animal through brain stimulation", патент US20030199944 A1 (також опубліковано як WO 2003066158 A2; CA2475546A1, EP1471971A2, EP1471971A4, US7970476, WO2003066158A3) і "Teleoperation of a freely roaming animal through brain stimulation" патент WO 2005112216 A2 (також опубліковано як СА2563308А1, EP1735048A2, EP1735048A4, US20090044761, US20130098310, WO2005112216A3). Способи засновані на використанні стимуляції передньомозкового пучка, який знаходиться у проміжному мозку щурів та є частиною системи позитивного підкріплення для руху щура вперед, а також стимуляції нервових ядер у корі мозку щурів, які є частиною тактильного аналізатора і являють собою ділянку кори головного мозку, яка відповідає за обробку чутливої інформації з рецепторів вібрисів щурів. Тварини швидко навчилися пов'язувати отримання віртуальних "тактильних" стимулів (у лівій або правій соматосенсорній корі) з напрямком, в який вони повинні повернути (ліворуч або праворуч), в результаті отримання потужного підкріплення: якщо вони повертали в правильному напрямку після коркового стимулу, вони негайно отримували електричний стимул в ділянку передньомозкового пучка, збудження якої призводило до отримання задоволення. Використовуючи цю парадигму навчання, віддалений оператор був здатен навчити щурів, які вільно пересуваються на місцевості, долати різні перешкоди, розташовані в лабораторії або на вулиці. Недоліками цих способів є: 1. Необхідність тренувань для кожної робочої тварини протягом тривалого часу для її навчання; 2. Неможливість передбачити ефективність таких систем в реальних складних умовах, оскільки зовнішні стресові фактори можуть значною мірою нівелювати реакції, основані на тренуванні і умовних рефлексах. 3) Відомий спосіб управління рухами щура (Саркисова К.Ю., Новикова М.Р., Зайченко М.И. и др… Дистанционное управление целенаправленным поведением свободно передвигающихся крыс посредством телестимуляции подкрепляющих структур мозга //Журн. ВНД. - 2010. - Т. 60. № 2. - С. 236-246). Спосіб, як і попередній, описаний вище, заснований на поєднанні спеціального навчання щурів з електростимуляцією їх мозку. Розробники використовували стимуляцію передньомозкового пучка як потужного позитивного підкріплення і навчали тварин постійно шукати "правильний" напрямок руху: якщо тварина обирала напрямок руху, який був необхідний оператору, вона отримувала позитивне підкріплення, якщо напрямок руху був невірний, підкріплення не було. Таким чином через декілька тижнів тренування щури навчались проходити необхідним для оператора маршрутом, долаючи на маршруті певні перешкоди. Головними недоліками цього способу є: 1. Необхідність тренувань для кожної робочої тварини протягом тривалого часу для її навчання; 2. Повільна швидкість рухів робочої тварини через постійний пошук нею "правильного" напрямку руху з позитивним підкріпленням; 3. Неможливість передбачити ефективність таких систем в реальних складних умовах, оскільки зовнішні стресові фактори можуть значною мірою нівелювати реакції, основані на тренуванні і умовних рефлексах. Опис способу Задачею розробки є створення нового способу управління рухами щура і керування його переміщенням у просторі, який передбачає електричну стимуляцію глибоких ділянок мозку щура, що викликає певні стабільні моторні реакції тварини без будь-якого попереднього її тренування. 1 UA 110712 C2 5 10 15 20 25 30 35 40 45 50 55 Для цього за допомогою стереотаксичного хірургічного метода в певні ділянки мозку дорослої живої тварини імплантуються електроди 150-200 мкм завтовшки. Для управління рухом тварини імплантовані електроди поєднуються зі спеціально розробленим дистанційно керованим мікростимулятором, який розміщується в рюкзаку на спині тварини. Оператор за допомогою спеціально розробленого програмного забезпечення має змогу формувати на персональному комп'ютері і посилати на мікростимулятор команди за допомогою радіозв'язку на базі Zig-Bee чи GSM протоколів комунікації. Мікростимулятор трансформує отримані команди в серії електричних імпульсів, які надсилає на певний електрод, імплантований в мозок тварини. Електричні імпульси, які надходять через електрод, стимулюють певну ділянку мозку, що, в свою чергу, викликає необхідну оператору моторну реакцію тварини. Параметри електричних імпульсів, що використовуються для стимуляції ділянок мозку: серія прямокутних імпульсів негативної полярності частотою 50-120 Гц, амплітудою 1-3,5 В чи 20-150 мкА; тривалість кожного імпульсу 0,4-1,0 мс. Новим в способі є те, що для керування рухами щура: Стимулюються глибокі ділянки мозку, що викликає незалежні стабільні моторні реакції без будь-якого попереднього тренування. Такі реакції значно стабільніші, ніж основані на навчанні і умовних рефлексах, призводять до негайних швидких моторних відповідей, і вплив зовнішніх чинників на ефективність цих реакцій стає значно меншим. Більше того, відсутність попереднього тренування робить процес створення робочих щурів і керування їх рухами дешевшим і набагато коротшим; Стимулюються глибокі ділянки мозку, до складу яких входять: lateral hypothalamic area (LH), ventrolateral tegmental area (VLTg), pontine reticular nucleus, oral part (PnO), reticulotegmental nucleus of the pons (RtTg), pedunculopontine tegmental nucleus (PPTg), cuneiform nucleus (CnF), deep mesencephalic nucleus (DpMe), mesencephalic trigeminal nucleus (Me5), microcellular tegmental nucleus (MiTg), bed nucleus of the stria terminalis, medial division (BSTM); для виконання щуром команди "хода чи нешвидкий біг" проводиться електростимуляція глибинної структури, до складу якої входить зона LH; для виконання щуром команди "поворот ліворуч" чи "поворот праворуч" проводиться іпсілатеральна електростимуляція глибинної структури мозку, до складу якої входять: VLTg, PnO, RtTg, PPTg; для виконання щуром команди "швидкий біг та стрибки" проводиться електростимуляція глибинної структури мозку, до складу якої входять ядра: CnF, DpMe, Me5, MiTg; для виконання щуром команди пошукової поведінки (рух у довільному напрямку, обстеження території) проводиться стимуляція глибинної структури мозку, до складу якої входить ядро BSTM. Запропонований спосіб ілюструється прикладом: За допомогою стереотаксичного хірургічного метода в певні ділянки мозку дорослої живої тварини були імплантовані електроди 200 мкм завтовшки (Фіг. 1). Зовнішні кінці електродів були припаяні до контактів роз'єму, який, разом з електродами, був закріплений на голові тварини за допомогою стоматологічного цементу. Після двох днів, які були дані щуру на відновлення після операції, на спину тварині одягали рюкзак, в якому розміщували спеціально розроблений мікростимулятор, що поєднувався з імплантованими електродами через закріплений на голові роз'єм (Фіг. 2). Спорядженого щура поміщали на незнайому для нього площадку для тестування, яка містила лабіринт з різноманітними перешкодами. Оператор за допомогою спеціально розробленого програмного забезпечення формував на персональному комп'ютері необхідні параметри стимуляції (прямокутні імпульси негативної полярності; частота імпульсів 100 Гц, амплітуда 40 мкА, тривалість кожного імпульсу 0,5 мс) і посилав на мікростимулятор команди за допомогою радіозв'язку на базі GSM (GPRS) протоколу комунікації. Мікростимулятор трансформував отримані команди в серії електричних імпульсів, які надсилав на певний електрод, імплантований в мозок тварини, і таким чином стимулював певну ділянку мозку, що, в свою чергу, викликало необхідну оператору моторну реакцію. Таким чином оператор, викликаючи і комбінуючи реакції "хода вперед", "поворот праворуч", "поворот ліворуч", "швидкий біг вперед" і "стрибки", проводив щура будь-яким визначеним маршрутом на площадці для тестування з подоланням таких перешкод, як круті і пологі схили, сходи, різні типи труб, містки (Фіг. 3). В наступних тестуваннях щур був проведений оператором як за визначеним маршрутом через декілька поверхів у будівлі, так і за визначеним маршрутом на відкритій місцевості. 60 2 UA 110712 C2 ФОРМУЛА ВИНАХОДУ 5 10 15 Спосіб управління рухами щура і керування його переміщенням у просторі, що передбачає електростимуляцію глибинних структур мозку, який відрізняється тим, що з метою активації певних рухів тварини стимулюють глибинні структури мозку, до складу яких входить: сукупність ядер cuneiform nucleus (CnF), deep mesencephalic nucleus (DpMe), mesencephalic trigeminal nucleus (Me5), microccllular tegmental nucleus (MiTg) - для ініціації швидкого бігу та стрибків щура; або сукупність ядер ventrolaieral tegmental area (VLTg), poiulne reticular nucleus, oral part (PnO), reticulolegmcntal nucleus of the pons (Rt Igj, pedunculopoiuinc legniental nucleus (PPTg) для виконання щуром іпсілатеральних поворотів ліворуч або праворуч; або зона lateral hypothalamic area (LH) - для ініціації ходи чи нешвидкого бігу щура; або ядро bed nucleus of the stria terminalis, medial division (RSTM) - для ініціації пошукової поведінки щура (рух у довільному напрямку, обстеження території). 3 UA 110712 C2 Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюKanevskyi Valerii Oleksandrovych
Автори російськоюКаневский Валерий Александрович
МПК / Мітки
МПК: G05D 3/00, G08C 17/02, A01K 15/00
Мітки: щура, спосіб, управління, рухами
Код посилання
<a href="https://ua.patents.su/6-110712-sposib-upravlinnya-rukhami-shhura.html" target="_blank" rel="follow" title="База патентів України">Спосіб управління рухами щура</a>
Спосіб доставки мезенхімальних стовбурових клітин в організм щура при лікуванні гострої фокальної ішемії мозку
Номер патенту: 64540
Опубліковано: 10.11.2011
Автори: Радик Роман Михайлович, Гринь Владислав Костянтинович, Паляниця Сергій Семенович, КАЗАКОВ ВАЛЕРІЙ МИКОЛАЙОВИЧ, Івнєв Борис Борисович, Попандопуло Андрій Геннадійович
МПК: G09B 23/28
Мітки: ішемії, спосіб, клітин, лікуванні, доставки, фокальної, гострої, стовбурових, організм, щура, мезенхімальних, мозку
Формула / Реферат:
Спосіб доставки мезенхімальних стовбурових клітин в організм щура при лікуванні гострої фокальної ішемії мозку, що включає ін'єкцію мезенхімальних стовбурових клітин (МСК) в організм щура, який відрізняється тим, що введення стовбурових клітин виконують шляхом безпосередньої трансплантації МСК у лікворопровідну систему головного мозку щура через боковий шлуночок.
Спосіб моделювання геморагічного інсульту у щура

Номер патенту: 56958
Опубліковано: 15.05.2003
Автори: Святюк Юлія Василівна, Бібікова Вікторія Миколаївна, Царьов Олександр Вікторович, Колдунов Віктор Володимирович, Козлов Сергій Володимирович
МПК: G09B 23/28
Мітки: спосіб, інсульту, моделювання, геморагічного, щура
Формула / Реферат:
Спосіб моделювання геморагічного інсульту у щура, що містить формування внутрішньомозкової гематоми шляхом введення аутокрові, який відрізняється тим, що артеріальну аутокров вводять білатерально у внутрішню капсулу головного мозку безпосередньо крізь фізіологічний отвір в черепі.
Спосіб керування рухами людини
Номер патенту: 41795
Опубліковано: 10.06.2009
Автори: Шевченко Анатолій Борисович, Іванов Валентин Володимирович, Вовк Майя Іванівна, Горбаньов Володимир Миколайович, Алєєв Леонид Седекович
МПК: A61N 1/36
Мітки: рухами, людини, керування, спосіб
Формула / Реферат:
Спосіб керування рухами людини шляхом стимуляції вибраного нервово-м'язового комплексу людини електричними сигналами, які керуються по одному або декількох параметрах сигналами біоелектричної активності, який відрізняється тим, що сигнали біоелектричної активності відводять з рухових одиниць м'язів тієї ж людини, функціонально не завантажених під час електростимуляції, переважно з м'язів, симетричних тим, скороченнями яких керують.
Спосіб моделювання травми спинного мозку щура шляхом половинного його розрізу у нижньогрудному відділі
Номер патенту: 92522
Опубліковано: 26.08.2014
Автори: Цимбалюк Віталій Іванович, Молотковець Віталій Юрійович, Медведєв Володимир Вікторович, Сенчик Юрій Юрійович
МПК: A61B 17/00
Мітки: розрізу, половинного, мозку, травми, моделювання, відділі, нижньогрудному, шляхом, спинного, спосіб, щура
Формула / Реферат:
Спосіб моделювання травми спинного мозку шляхом половинного його розрізу у нижньогрудному відділі (Т11) статевозрілих щурів-самців, що є способом наукового моделювання, який відрізняється тим, що щурам-самцям, вагою 250-300 грамів, віком 5,5 після виконання загального знеболення з використанням суміші, розчинів ксилазину (15 мг/кг) і кетаміну (70 мг/кг), проводять розріз спинного мозку на нижньогрудному рівні, шляхом введення в місце...
Спосіб повного перетину спинного мозку щура у верхньокрижовому відділі

Номер патенту: 92520
Опубліковано: 26.08.2014
Автори: Молотковець Віталій Юрійович, Цимбалюк Віталій Іванович, Медведєв Володимир Вікторович, Сенчик Юрій Юрійович
МПК: A61B 17/00
Мітки: щура, повного, мозку, спосіб, верхньокрижовому, спинного, перетину, відділі
Формула / Реферат:
Спосіб повного перетину спинного мозку у верхньокрижовому відділі, що включає моделювання формування синдрому посттравматичної еластичності у м'язах хвоста, який відрізняється тим, що щурам-самцям, вагою 250-300 г, віком 5,5 міс. після загального знесоленням з використанням суміші розчинів ксилазину (15 мг/кг) і кетаміну (70 мг/кг) проводять доступ до спинного мозку, далі атравматичною голкою із ниткою № 10 проколюють тканину спинного мозку...
Попередній патент: Обладнання для зменшення відмітки на екрані радара для літальних апаратів
Наступний патент: Спосіб управління рухами голуба
Випадковий патент: Гідравлічний циліндр низького тиску