Спосіб керування рухами людини
Номер патенту: 41795
Опубліковано: 10.06.2009
Автори: Іванов Валентин Володимирович, Алєєв Леонид Седекович, Горбаньов Володимир Миколайович, Шевченко Анатолій Борисович, Вовк Майя Іванівна
Формула / Реферат
Спосіб керування рухами людини шляхом стимуляції вибраного нервово-м'язового комплексу людини електричними сигналами, які керуються по одному або декількох параметрах сигналами біоелектричної активності, який відрізняється тим, що сигнали біоелектричної активності відводять з рухових одиниць м'язів тієї ж людини, функціонально не завантажених під час електростимуляції, переважно з м'язів, симетричних тим, скороченнями яких керують.
Текст
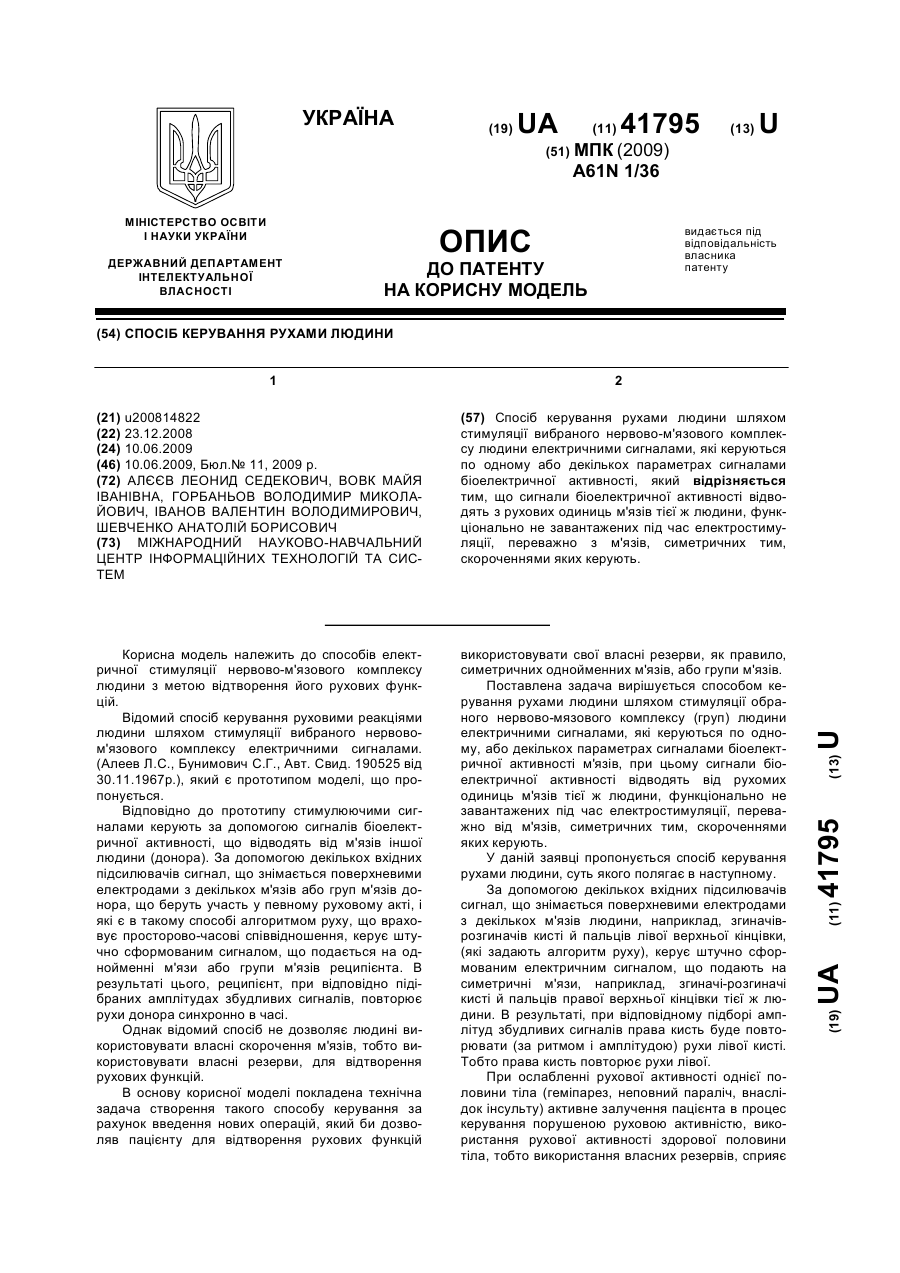
Спосіб керування рухами людини шляхом стимуляції вибраного нервово-м'язового комплексу людини електричними сигналами, які керуються по одному або декількох параметрах сигналами біоелектричної активності, який відрізняється тим, що сигнали біоелектричної активності відводять з рухових одиниць м'язів тієї ж людини, функціонально не завантажених під час електростимуляції, переважно з м'язів, симетричних тим, скороченнями яких керують. (19) (21) u200814822 (22) 23.12.2008 (24) 10.06.2009 (46) 10.06.2009, Бюл.№ 11, 2009 р. (72) АЛЄЄВ ЛЕОНИД СЕДЕКОВИЧ, ВОВК МАЙЯ ІВАНІВНА, ГОРБАНЬОВ ВОЛОДИМИР МИКОЛАЙОВИЧ, ІВАНОВ ВАЛЕНТИН ВОЛОДИМИРОВИЧ, ШЕВЧЕНКО АНАТОЛІЙ БОРИСОВИЧ (73) МІЖНАРОДНИЙ НАУКОВО-НАВЧАЛЬНИЙ ЦЕНТР ІНФОРМАЦІЙНИХ ТЕХНОЛОГІЙ ТА СИСТЕМ 3 41795 реабілітації як процесу відтворення порушеної рухової активності. Певну роль пропонований спосіб керування може грати при керуванні координаціями здорової людини, наприклад у спорті, коли стає завдання однакового по силі й тривалості скорочення симетричних м'язів. Таким чином, основною відмінною рисою пропонованого способу від прототипу є те, що для керування рухами людини шляхом електростимуляції вибраного нервово-м'язового комплексу поряд з використанням алгоритму руху, що задається сигналами електричної активності м'язів іншої людини (донора), використовується алгоритм руху, що задається сигналами електричної активності власних (здорових) м'язів, функціонально не завантажених під час електростимуляції, переважно симетричних. Це дає можливість використовувати власні резерви організму для відновлення рухових функцій. Для ілюстрації пропонуємого способу нижче приведена на фіг. блок-схема одного каналу багатоканального апарата, що реалізує пропонований спосіб. Принцип дії інших каналів аналогічний. На блок-схемі показаний також варіант, коли стимуляцію м’язів пацієнта можливо виконувати шляхом відведення сигналів електростимуляції іншої людини (донора). Блок-схема містить власні м'язи 1 людини, які задають алгоритм керування рухами, м'язи 2 іншої людини (донора, інструктора), що задають алгоритм керування рухами, електроди 3, що відводять біопотенціали м'язів, що керують, вхідний підсилювач 4 (підсилювач біопотенціалів), інтегратор 5, модулятор 6, генератор 7 стимулюючого сигналу, вихідний підсилювач 8, електроди 9, що підводять стимулюючий сигнал, м'язи 10 людини, скороченнями яких керують. Комп’ютерна верстка І.Скворцова 4 Біопотеціали, що виникають при скороченні власних м'язів (1) людини, рухами якої керують, функціонально не завантажених під час електростимуляції, або з м'язів (2) іншої людини (донора, інструктора), знімаються за допомогою поверхневих електродів, що відводять електродами (3), з рухових точок, тої або іншої групи м'язових волокон і підводять до вхідного підсилювача - підсилювача біопотенціалів (4). За допомогою вхідного підсилювача (4) сигнали підсилюються й потім подаються на інтегратор (5), який виконує усереднення електроміограми в часі. Постійна часу може мінятися. Сигнал, що представляє за формою середнє значення електроміограми, подається на наступний блок - модулятор (6). На цей же блок (6) подається електричний сигнал від генератора (7) стимулюючого сигналу. На виході модулятора (6) з'являється сигнал, за формою, що збігається із сигналом від генератора стимулюючого сигналу, але по амплітуді пропорційний величині середнього значення електроміограми. Генератор (7) стимулюючого сигналу - пристрій, що виробляє електричні сигнали різних параметрів. Сигнал з модулятора (6) подається на вихідний підсилювач (8), що дозволяє на виході отримати сигнали, які за рівнем дозволяють одержати необхідне скорочення м'язів, що приймають участь в керованому русі. Цей сигнал через стимулюючі електроди (9) подається на відповідні рухові точки вибраного нервово-м'язового комплексу (10) для керування рухами людини. Спосіб керування рухами людини, що пропонується, дозволяє самостійно людині керувати ритмом, силою і швидкістю скорочення чи розслаблення своїх м'язів, які приймають участь в русі. Спосіб не має перешкод для технічної реалізації. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for guiding movements of person
Автори англійськоюAlieiev Leonid Sedekovych, Vovk Maia Ivanivna, Horbaniov Volodymyr Mykolaiovych, Ivanov Valentyn Volodymyrovych, Shevchenko Anatolii Borysovych
Назва патенту російськоюСпособ управления движениями человека
Автори російськоюАлеев Леонид Седекович, Вовк Майя Ивановна, Горбанев Владимир Николаевич, Иванов Валентин Владимирович, Шевченко Анатолий Борисович
МПК / Мітки
МПК: A61N 1/36
Мітки: спосіб, рухами, людини, керування
Код посилання
<a href="https://ua.patents.su/2-41795-sposib-keruvannya-rukhami-lyudini.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування рухами людини</a>
Спосіб керування роботою машини із коливними рухами робочих органів
Номер патенту: 10971
Опубліковано: 15.12.2005
Автори: Берник Павло Степанович, Пашистий Вадим Ананієвич, Чубик Роман Васильович
МПК: B65G 27/10
Мітки: спосіб, органів, робочих, машини, керування, коливними, роботою, рухами
Формула / Реферат:
1. Спосіб керування роботою машин з коливними рухами робочих органів, при якому за допомогою системи керування приводом відслідковують власну частоту коливань механічної системи, підтримуючи режим роботи машини близьким до резонансного, який відрізняється тим, що в процесі роботи машини через систему керування безперервно контролюють два параметри - частоту та амплітуду коливань робочого органа, і у випадку зміни завантаження робочого органа...
Пристрій для автоматичного керування планшетністю штаби прокату
Номер патенту: 14507
Опубліковано: 15.05.2006
Автори: Попович Микола Гаврилович, Островерхов Микола Якович
МПК: B21B 37/00
Мітки: прокату, планшетністю, пристрій, керування, штаби, автоматичного
Формула / Реферат:
Пристрій для автоматичного керування планшетністю штаби прокату, що містить датчик розподілу натягу по ширині штаби, виходи якого по числу зон вимірювання з'єднані з входами блока керування, перетворювачі частоти з рекуперативним гальмуванням, виходи яких з'єднано із входами лінійних асинхронних двигунів, встановлених під штабою відповідно до зон вимірювання натягу, датчик швидкості штаби, який з'єднано з додатковим входом блока керування,...
Спосіб керування процесом шихтування
Номер патенту: 35645
Опубліковано: 25.09.2008
Автори: Ульшин Віталій Олександрович, Гавриш Олександр Іванович
МПК: G05D 11/00
Мітки: шихтування, спосіб, процесом, керування
Формула / Реферат:
Спосіб керування процесом шихтування, який полягає в тому, що формують і подають в систему сигнали задання продуктивності окремих дозаторів, вимірюють загальну продуктивність, формують пропорційно до неї сигнал, який відрізняється тим, що додатково формують коригуючий сигнал на зміну часткового вмісту групи компонентів шихти, пропорційний відхиленню показника зольності готової шихти від заданого значення.
Спосіб керування потужністю в замкненій системі керування потужністю системи зв’язку з режимом паралельного доступу з кодовим розподілом каналів (пдкр) (варіанти) та замкнена система керування потужністю систем
Номер патенту: 57747
Опубліковано: 15.07.2003
Автор: Сеінтс Кіт В.
МПК: H04B 7/00
Мітки: замкнена, замкнений, зв'язку, режимом, варіанти, керування, система, системі, кодовим, паралельного, розподілом, систем, доступу, спосіб, каналів, потужністю, пдкр
Формула / Реферат:
1. Спосіб керування потужністю в замкненій системі керування потужністю системи зв'язку з режимом паралельного доступу з кодовим розподілом каналів (ПДКР), який полягає в:вимірюванні значення енергії у смузі частот,вимірюванні енергії пілот-каналу,перерахунку зазначеної енергії пілот-каналу відповідно до значення пілотної складової для одержання значення неперешкоджаючої енергії.відніманні зазначеного значення...
Намотувальна машина для термопластичних ниток, яка діє з роз’єднаними рухами

Номер патенту: 84008
Опубліковано: 10.09.2008
Автори: Бувьє Жан-Марк, Воллє Жером, Нолє Крістоф
МПК: B65H 54/28, B65H 67/04
Мітки: ниток, діє, машина, намотувальна, яка, рухами, роз'єднаними, термопластичних
Формула / Реферат:
1. Намотувальна машина (1), яка, по суті, складається зі станини (2), що містить щонайменше два шпинделі (6, 7), прикріплені до барабана (5); причому згадані шпинделі, з одного боку, виконані з можливістю встановлення на них щонайменше одного кулича, і, з іншого боку, з можливістю обертання навколо першої осі, по суті, перпендикулярній діаметру кулича; і щонайменше один позиціонуючий і направляючий пристрій (8), який позиціонує і направляє...