Спосіб керування роботою машини із коливними рухами робочих органів
Номер патенту: 10971
Опубліковано: 15.12.2005
Автори: Пашистий Вадим Ананієвич, Берник Павло Степанович, Чубик Роман Васильович
Формула / Реферат
1. Спосіб керування роботою машин з коливними рухами робочих органів, при якому за допомогою системи керування приводом відслідковують власну частоту коливань механічної системи, підтримуючи режим роботи машини близьким до резонансного, який відрізняється тим, що в процесі роботи машини через систему керування безперервно контролюють два параметри - частоту та амплітуду коливань робочого органа, і у випадку зміни завантаження робочого органа або при необхідності зміни режиму роботи машини за допомогою системи керування коректують частоту та амплітуду вимушуючих коливань приводу робочого органа до частоти, котра близька до резонансної частоти пружної системи вібромашини при заданих завантаженні і амплітуді коливань.
2. Спосіб за п. 1, який відрізняється тим, що частоту вимушуючих коливань приводу робочого органа вибирають з умови:
fvymush=frezon+1 (Гц)
де: frezon - резонансна частота пружної системи вібромашини.
3. Спосіб за пп. 1, 2, який відрізняється тим, що корекцію параметрів коливного руху робочого органа машини проводять завдяки використанню програмного забезпечення системи керування.
4. Спосіб за пп. 1, 2, 3, який відрізняється тим, що система керування діє на електромагніт вібромашини широтно-імпульсно модульованою синусоїдальною напругою.
Текст
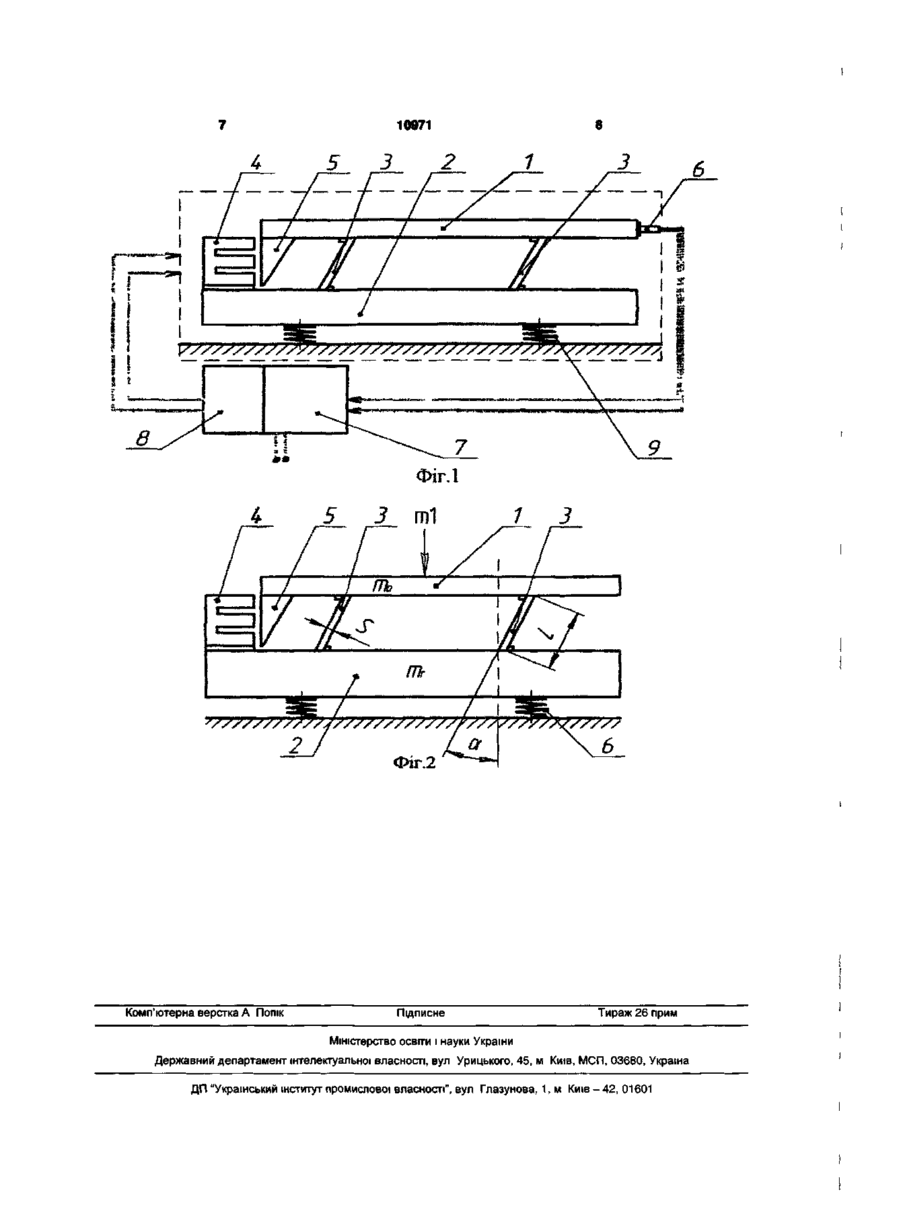
1 Спосіб керування роботою машин з коливними рухами робочих органів, при якому за допомогою системи керування приводом відслідковують власну частоту коливань механічної системи, підтримуючи режим роботи машини близьким до резонансного, який відрізняється тим, що в процесі роботи машини через систему керування безперервно контролюють два параметри - частоту та амплітуду коливань робочого органа, і у випадку зміни завантаження робочого органа або при необхідності зміни режиму роботи машини за допо могою системи керування коректують частоту та амплітуду вимушуючих коливань приводу робочого органа до частоти, котра близька до резонансної частоти пружної системи вібромашини при заданих завантаженні і амплітуді коливань 2 Спосіб за п 1, який відрізняється тим, що частоту вимушуючих коливань приводу робочого органа вибирають з умови lvymush = lrezon+1 (ГЦ) де frezon - резонансна частота пружної системи вібромашини 3 Спосіб за пп 1, 2, який відрізняється тим, що корекцію параметрів коливного руху робочого органа машини проводять завдяки використанню програмного забезпечення системи керування 4 Спосіб за пп 1, 2, 3, який відрізняється тим, що система керування діє на електромагніт вібромашини широтно-імпульсно модульованою синусоїдальною напругою CO Корисна модель стосується вібраційної техніки і може знайти застосування в таких галузях як машинобудування та приладобудування, а також в гірничо-переробній промисловості ВІДОМІ способи підтримки роботи вібраційних машин в режимах, близьких до резонансних До них відносяться спосіб підтримки режиму коливань робочого органу, близького до резонансного за рахунок зміни жорсткості пружної системи машини [1] Недоліком даного способу є неможливість автоматичного регулювання жорсткості підвіски при ЗМІНІ навантаження на робочий орган Найбільш близьким по технічній суті є спосіб підтримки коло резонансного режиму роботи вібромашини за рахунок відслідковування власної частоти коливань механічної системи [2], тобто проходить процес підсилення сигналу отриманого від датчика вібрації двома підсилювачами, та вихідний силовий сигнал подається на електромагніт вібромашини Цей спосіб дозволяє здійснювати автоматичну піднастройку частоти вимушуючої сили яка близька до резонансної частоти механічної системи Але і цей спосіб має недоліки Основним із них є а) Дана система керування не є повністю автоматична, вона вимагає підчас запуску участь людини для пошуку резонансної частоти механічноі системи, після знаходження резонансної частоти вимагає переключення системи керування у слідкуючий режим б) Сигнал, який ми отримуємо із датчика вібрації, буде містити крім основної гармоніки, що рівна резонансній частоті механічної системи, ще й додаткові паразитні гармоніки, які обумовлені ударами деталей, що транспортуються, об корпус Тому після підсилення двома підсилювачами із врахуванням того, що кожний підсилювач має свій коефіцієнт нелінійних спотворень можна із впевненістю сказати, що частота вимушуючої сили не буде точно відповідати режиму роботи, близькому до резонансного в) Також згідно [3] збільшення приведеної маси приводить до зменшення частоти резонансу механічної системи Дана система керування проведе зміну частоти з певною точністю завдяки датчику вібрації, але для того щоб амплітуда І 0) 5Г 10971 коливань системи, тепер уже із більшою масою на новій резонансній частоті залишилася незмінною, необхідно проводити автоматичну корекцію амплітуди вимушуючої сили, тобто система керування згідно [2] не може проводити автоматичне регулювання амплітуди вимушуючої сили. Метою корисної молелі є розширення функціональні можливості машин із коливними рухами робочих органів і економія електроенергії, яка витрачається на їх привід. Поставлена мета досягається тим, що в способі керування роботою машини із коливними рухами робочих органів, в якому система керування приводом, відслідковуючи власну частоту коливань механічної системи, підтримує режим роботи машини близький до резонансного, згідно корисної моделі, в процесі роботи машини система керування контролює два параметри - частоту та амплітуду коливань робочого органу і в випадку зміни завантаження робочого органу або при необхідності зміни режиму роботи машини система керування коректує частоту та амплітуду вимушуючих коливань приводу робочого органу, до частоти котра близька до резонансної частоти пружної системи вібромашини при заданому завантаженні робочого органу і амплітуду коливань на резонансній частоті так, що б вона відповідала оптимальному режиму технологічного процесу. Такий спосіб дозволяє автоматизувати процес піднастройки частоти і амплітуди вимушуючих коливань приводу робочого органу вібромашини при зміні завантаження робочого органу або при необхідності зміни режиму роботи вібромашини до значень, котрі відповідають колорезонансному режими роботи. Колорезонансний режим роботи забезпечується ТИМ ЩО, ЧаСТОТа ВИМушуЮЧОЇ СИЛИ fvymush ПОСТІЙНО на 1 (Гц) більша ніж частота резонансу пружної системи вібромашини і тим самим забезпечуються мінімальні витрати енергії на вібропривід при роботі в двох основних режимах роботи: а) режим максимальної швидкості вібротранспортування або максимальної інтенсивності віброобробки при різних масах завантаження б) режим, коли для умов технологічного процесу необхідно стабільність таких параметрів як: продуктивність вібромашини, швидкість вібротранспортування, інтенсивність віброобробки незалежно від маси завантаження вібромашини. Відомо згідно [3], що при роботі вібромашини в резонансному режимі проходить різке зростання амплітуди коливань, що може зруйнувати конструкцію машини, а також приводить до некерованого та нестабільного режиму роботи вібромашини. Тому вибрано постійне підтримування частоти вимушуючих коливань приводу робочого органу вібромашини в колорезонансному режимі роботи де зберігається основна перевага резонансного режиму роботи - мінімальні витрати електроенергії на привід, при збереженні оптимального режиму роботи. Спосіб відрізняється тим що, корекція параметрів коливного руху робочого органу машини про водиться завдяки використанню програмного забезпечення системи керування. Завдяки тому що, корекція параметрів коливного руху робочого органу машини проводиться із використанням програмного забезпечення системи керування: це дає можливість звести до мінімуму час на налагодження та переналагодження системи при переході на інший технологічний через те, що витрачається час лише на корекцію або заміну програмного забезпечення промислового мікроконтролера. Пристрій відрізняється тим, що для живлення приводу вібромашин використано широтноімпульсно модульовану синусоїдальну напругу, що дозволяє отримувати синусоїдальну напругу необхідної частоти та великої потужності. На фіг.1 зображений спосіб керування роботою машин із коливним рухом робочих органів на прикладі керування роботою вібролотка. Вібролоток 1 закріплений до рами 2 плоскими пружинами З, рама 2 закріплена на амортизаторах 9. Привід лотка 1 здійснюється від електромагніта 4 закріпленого на рамі 2. Електромагніт 4 взаємодіє із якорем 5 закріпленим до вібролотка 1. До складу системи керування входить датчик вібрації (акселерометр) (6) який закріплено на робочому органі машини 1. Датчик вібрації 6 [4, 5] з'єднано електричним зв'язком із промисловим мікроконтролером 7, а промисловий мікроконтролер 7 із зашитою в нього програмою керування з'єднано електричним зв'язком із перетворювачем частоти 8. Спосіб керування роботою вібролотка 1 наступний. Датчик вібрації 6 безперервно передає інформацію [4, 5] у вигляді електричного сигналу, про частоту та амплітуду механічних коливань вібролотка 1. Електричні сигнали із датчика 6 поступають на промисловий мікроконтролер 7 де він проводить відповідну обробку із аналізом відповідності амплітуди та частоти коливань пружної системи вібромашини до заданих оператором значень (оптимальних для даного технологічного процесу). При зміні навантаження на Вібролоток 1 пройде зміна амплітуди та частоти коливань пружної системи вібромашини і відповідно до цього зміняться параметри електричного сигналу на виході датчика вібрації (акселерометра) 6, що поступають на вхід промислового мікроконтролера 7. Промисловий мікроконтролер 7 спілкуючись по стандартному промисловому інтерфейсу із перетворювачем частоти 8 віддасть йому команду, збільшити або зменшити [7] амплітуду широтноімпульсно модульованої напруги ІІшім- Порівнюючи нову частоту коливань пружної системи вібромашини із попередньою частотою мікроконтролер 7, використовуючи програму керування, спілкується по стандартному промисловому інтерфейсу із перетворювачем частоти 8, віддає команду змінити частоту широтно-імпульсно модульованої синусоїди [7] на його виході в ту сторону в яку пройшла зміна власної частоти коливань пружної системи вібромашини. Тобто в сторону зміни резонансу механічної системи. Причому промисловий мікроконтролер 7 буде постійно зберігати різницю в 12(Гц) між частотою [7] широтно-імпульсно модульованої синусоїди на виході перетворювача 10971 частоти 8 та резонансною частотою пружної системи вібромашини. Розглянемо практичне використання способу на прикладі роботи вібролотка (фіг.2). Згідно [6, 8] при розрахунках жорсткість амортизаторів 6 не береться до уваги тому, що вона набагато менша за жорсткість пружин 3. Параметри пружин машини, довжина Ь=30мм, товщина S=8MM. Матеріал сталь 65Г, модуль пружності матеріалу Е=21 -103кг/мм2. Визначаємо жорсткість пружин та власну (резонансну) частоту коливань механічної' системи враховуючи масу лотка та масу рами. Згідно [6, 8] жорсткість с = % : де Р - навантаження яке діє на пружину (кг), F - пружна деформація пружини під дією сили Р. Максимально допустиме навантаження пружин в (кг) буде: Ртах = Ь S , [ 6 3 Г ] , ТУТ [5ЗГ] = 7ОК/ g b L / MM -допустиме ДІЄЮ СИЛИ Ртах буДЄ рівна d L Pn bSdE = 7,14мм, = 2,351x105 W. с= % ' •~зг max м жорсткість власна (резонансна) частота механічної системи без деталей: 2% 'м гп я mг _ = 2,2кг, де т а =3кг - маса вібm a +m r ролотка 1, т г =8кг - маса рами 2. Для надійної роботи (колорезонансний режим) вібролотка частота вимушених коливань буде: де: М = fvymush=frezon+1 =53,24(Гц) При транспортуванні деталей масою т1=1кг, збільшиться приведена маса системи: {—- = 2,67кг, ТОДІ частота резонансу М = -f—s (m a +m1J+m r зміниться та буде рівна: їм Рі=47.26(Гц) 2 п Для того, щоб забезпечити ефективний режим роботи з точки зору енергозбереження необхідно провести корекцію частоти вимушуючих коливань приводу робочого органу вібромашини fnpHimiHKD^^^npHtm^iKr)^ + 1 = 4 8 і 26(Гц), де: А=1,5мм - амплітуда коливань лотка. V=48,26-1,5=72,34 мм/с При транспортування деталей масою т1=2кг збільшиться приведена маса системи: М = -т^-2 т —-- = 3,077кг, ТОДІ частота резонан с а +m1)+mr су зміниться та буде рівна: = —— . — = 43.99(Гц) V ; 2 п VM а частота вимушуючих коливань приводу робочого органу вібромашини npn(m1=Kr) f І _хпри(т1=2кг) vymush—I л-лл QQ/Гі і\ rezon + і—ч-ч-,»»^| ц^. Дня забезпечення цієї самої ШВИДКОСТІ при транспортуванні деталей масою т1=2кг необхідно збільшити амплітуду коливань, тепер А= )• % , = 7 2 9 навантаження згину для сталі 65Г. Підставивши параметри пружин отримаємо Ртах=76,22кг. Максимальна деформація пружин F3rmax, яка виникає ПІД \/_*при(т1=1кг) д V—І vymush r\ ТОбТО змінити частоту [7] широтно-імпульсно модульованої синусоїди на виході перетворювача частоти. При транспортуванні деталей масою ml ШВИДКІСТЬ переміщення деталей по лотку складала: 9 Застосування запропонованого способу керування роботою машин із коливним рухом робочих органів дозволить повністю автоматизувати процес керування даним класом машин та забезпечити оптимальні режими роботи при мінімальних затратах енергії на вібропривід. Даний спосіб зводить до мінімуму перехідні процеси при ЗМІНІ маси завантаження або ЗМІНІ режиму роботи, параметрів технологічного процесу. Література: 1. Авторське свідоцтво СССР №541740 кл., B65G27/00, 1977. 2. Авторське свідоцтво СССР №776961 кл., B65G27/24, 1980. 3. Э.Э. Лавендал. Вибрации в технике Справ, в 6 т. - М.. Машиностроение, 1981. - Т.4. Вибрационные процессы и машины. - 510с. 4. Добрынин С.А., Фельдман М.С., Фирсов Г.И. Методы автоматизированного исследования вибрации машин. Москва, «МАШИНОСТРОЕНИЕ», 1987,-225ст. 5. А.Г. Гетманов, П.И. Дегтяренко, Б.Ю. Мандровский-Соколов и др. Автоматическое управление вибрационными испытаниями. М.: Энергия, 1978. 112с. 6. В.И. Анурьев Справочник конструктора машиностроителя. Т-3. Москва. "Машиностроение" 1979.557ст. 7. Михайлов О.П. Автоматизированный электропривод станков и промышленных роботов. Учебник для вузов. - М.: Машиностроение. 1990 304ст. 8. Крюков Б.И. Динамика вибрационных; машин резонансного тина. Киев, «Наукова думка», 1970,230ст. 10971 ФІГ Л 5 З ml 1 З Фіг.2 Комп'ютерна верстка А Попік Підписне Тираж 26 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул Урицького, 45, м Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул Глазунова, 1, м Київ - 4 2 , 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of control of operation of machines with fluctuating motions of operating units
Автори англійськоюBernyk Pavlo Stepanovych, Chubyk Roman Vasyliovych
Назва патенту російськоюСпособ управления работой машины с колебательными движениями рабочих органов
Автори російськоюБерник Павел Степанович, Чубик Роман Васильевич
МПК / Мітки
МПК: B65G 27/10
Мітки: коливними, керування, роботою, рухами, органів, спосіб, машини, робочих
Код посилання
<a href="https://ua.patents.su/4-10971-sposib-keruvannya-robotoyu-mashini-iz-kolivnimi-rukhami-robochikh-organiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування роботою машини із коливними рухами робочих органів</a>
Гідропривід робочих органів машини
Номер патенту: 7460
Опубліковано: 15.06.2005
Автори: Рибалко Вячеслав Миколайович, Ярошенко Володимир Федорович, Козубець Олександр Володимирович, Ловейкін Вячеслав Сергійович
МПК: A01D 69/00
Мітки: гідропривід, робочих, органів, машини
Формула / Реферат:
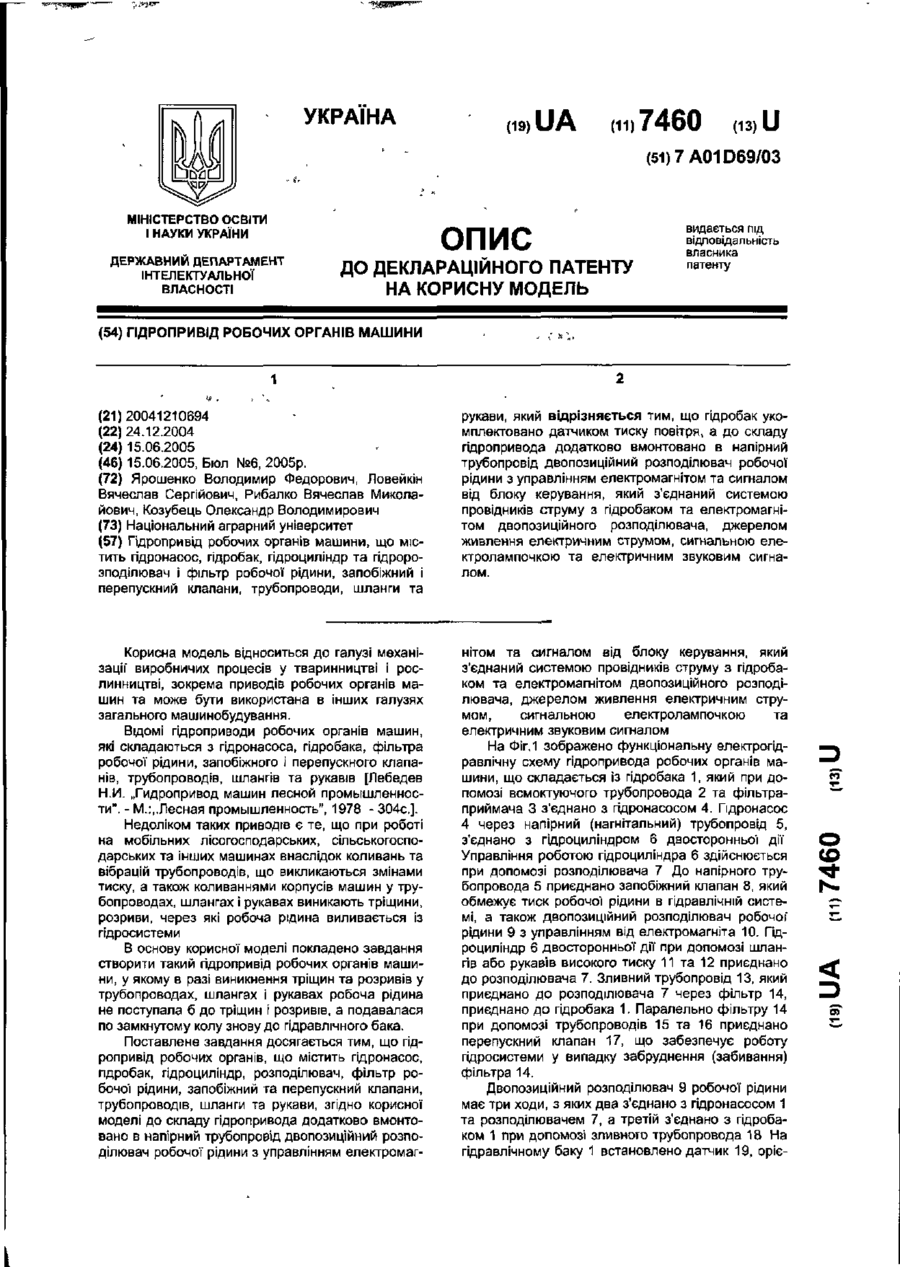
Гідропривід робочих органів машини, що містить гідронасос, гідробак, гідроциліндр та гідророзподілювач і фільтр робочої рідини, запобіжний і перепускний клапани, трубопроводи, шланги та рукави, який відрізняється тим, що гідробак укомплектовано датчиком тиску повітря, а до складу гідропривода додатково вмонтовано в напірний трубопровід двопозиційний розподілювач робочої рідини з управлінням електромагнітом та сигналом від блоку керування,...
Гідравлічний привід робочих органів машини
Номер патенту: 7498
Опубліковано: 15.06.2005
Автори: Ловейкін Вячеслав Сергійович, Рибалко Вячеслав Миколайович, Ярошенко Володимир Федорович
МПК: A01D 69/00
Мітки: машини, робочих, привід, гідравлічний, органів
Формула / Реферат:
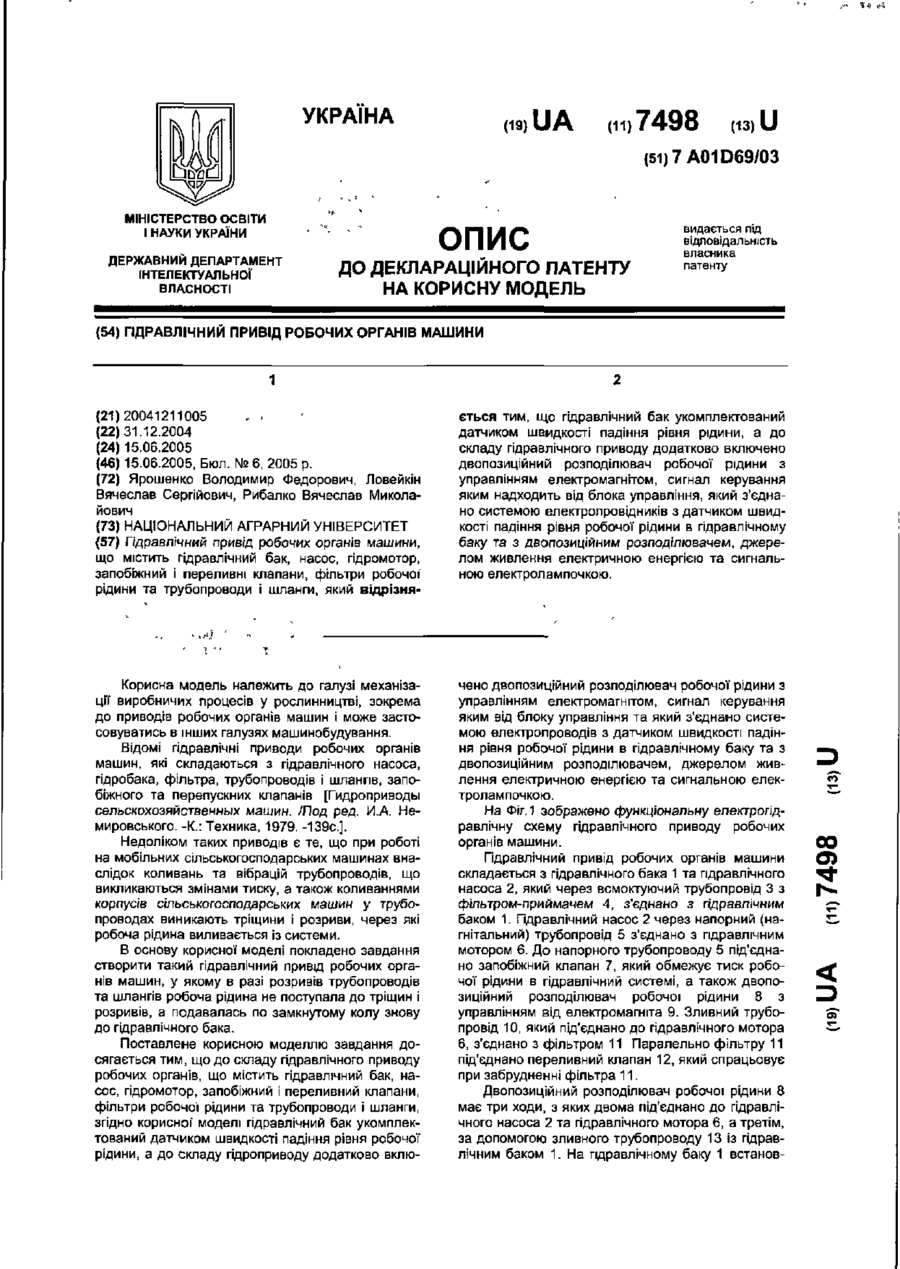
Гідравлічний привід робочих органів машини, що містить гідравлічний бак, насос, гідромотор, запобіжний і переливні клапани, фільтри робочої рідини та трубопроводи і шланги, який відрізняється тим, що гідравлічний бак укомплектований датчиком швидкості падіння рівня рідини, а до складу гідравлічного приводу додатково включено двопозиційний розподілювач робочої рідини з управлінням електромагнітом, сигнал керування яким надходить від блока...
Спосіб захисту робочих органів збиральної машини при попаданні сторонніх предметів та пристрій для його здійснення
Номер патенту: 24683
Опубліковано: 04.08.1998
Автори: Борошок Лев Абрамович, Нєдовєсов Віктор Іванович
МПК: A01D 75/00
Мітки: робочих, предметів, здійснення, захисту, пристрій, збиральної, органів, сторонніх, спосіб, машини, попаданні
Формула / Реферат:
1. Спосіб захисту робочих органів збиральної машини при попаданні сторонніх предметів, в якому визначають наявність стороннього аварійнонебезпечного предмета в рослинній масі, яка подається до технологічних переробляючих робочих органів, після чого зупиняють подаючий механізм, який відрізняється тим, що вимірюють механічні коливання по всій поверхні платформи зрізаючого чи підбираючого механізма і по параметрам цих коливань судять про те, що...
Привід робочих органів сільськогосподарської машини
Номер патенту: 2225
Опубліковано: 15.12.2003
Автори: Воробйов Дмитро Леонідович, Мартиненко Сергій Анатолієвич, Воробйов Андрій Леонідович
МПК: A01D 69/00
Мітки: сільськогосподарсько, органів, машини, робочих, привід
Формула / Реферат:
Привід робочих органів сільськогосподарської машини, що містить двигун, привідний шків, зв'язаний з валом двигуна і з робочими органами, який відрізняється тим, що привідний шків виконаний в вигляді турбінного колеса регульованої гідромуфти, насосне колесо якої з'єднано з валом двигуна.
Гідравлічний привід робочих органів машини
Номер патенту: 7462
Опубліковано: 15.06.2005
Автори: Ловейкін Вячеслав Сергійович, Ярошенко Володимир Федорович, Шостак Анатолій Вікторович, Рибалко Вячеслав Миколайович
МПК: A01D 69/00
Мітки: робочих, машини, органів, гідравлічний, привід
Формула / Реферат:
Гідравлічний привід робочих органів машини, що містить гідравлічний насос, гідравлічний бак з робочою рідиною, виконуючі гідроциліндри, гідромотори, розподілювач потоку рідини, запобіжний і переливний клапани, фільтри, напірний та зливний трубопроводи, шланги і рукави, який відрізняється тим, що в напірному трубопроводі додатково вмонтовано датчик тиску робочої рідини та двопозиційний розподілювач з керуванням електромагнітом за допомогою...
Попередній патент: Спосіб виробництва марочного міцного білого вина “мадера “морський берег”
Наступний патент: Спосіб визначення теплової провідності контакту з`єднань з натягом
Випадковий патент: Спосіб одержання гіркої настоянки "кодацька фортеця"