Патенти з міткою «рухами»
Спосіб управління рухами голуба
Номер патенту: 110713
Опубліковано: 10.02.2016
Автори: Тукаленко Євген Валерійович, Каневський Валерій Олександрович, Григоров Олексій Олегович
МПК: A01K 15/00, G05D 3/00, A01K 35/00 ...
Мітки: голуба, спосіб, управління, рухами
Формула / Реферат:
Спосіб управління рухами голуба і керування його переміщенням у просторі, що передбачає електростимуляцію глибинних структур мозку, який відрізняється тим, що з метою активації певних рухів тварини стимулюються глибинні ділянки мозку, до складу яких входить: сукупність структур Nucleus mesencephalicus lateralis pars dorsalis (MLd), Nucleus intracollicularis (ICo), Substantia grisea centralis (GCt), Radix mesencephalicus nervi trigemini...
Спосіб управління рухами щура
Номер патенту: 110712
Опубліковано: 10.02.2016
Автори: Тукаленко Євген Валерійович, Григоров Олексій Олегович, Каневський Валерій Олександрович
МПК: G05D 3/00, G08C 17/02, A01K 15/00 ...
Мітки: рухами, щура, управління, спосіб
Формула / Реферат:
Спосіб управління рухами щура і керування його переміщенням у просторі, що передбачає електростимуляцію глибинних структур мозку, який відрізняється тим, що з метою активації певних рухів тварини стимулюють глибинні структури мозку, до складу яких входить: сукупність ядер cuneiform nucleus (CnF), deep mesencephalic nucleus (DpMe), mesencephalic trigeminal nucleus (Me5), microccllular tegmental nucleus (MiTg) - для ініціації швидкого бігу та...
Процес створення вертикальної тяги для літаків маховими рухами крила
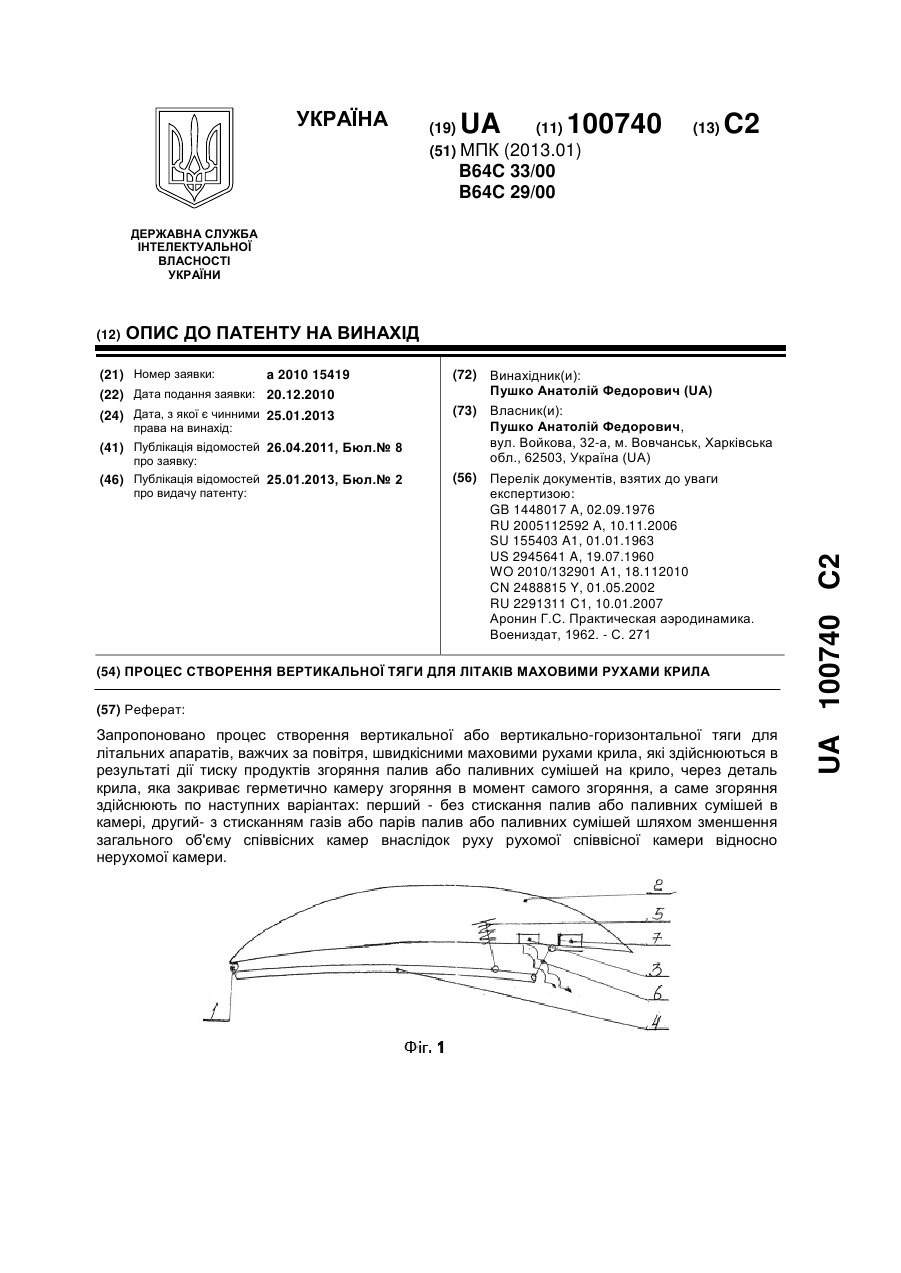
Номер патенту: 100740
Опубліковано: 25.01.2013
Автор: Пушко Анатолій Федорович
МПК: B64C 29/00, B64C 33/00
Мітки: рухами, маховими, вертикальної, крила, тяги, створення, процес, літаків
Формула / Реферат:
1. Процес створення вертикальної або вертикально-горизонтальної тяги для літальних апаратів, важчих за повітря, швидкісними маховими рухами крила, які здійснюють в результаті дії тиску продуктів згоряння палив або паливних сумішей на крило, через деталь крила, яка закриває герметично камеру згоряння в момент самого згоряння, а саме згоряння здійснюють по наступних варіантах: перший - без стискання палив або паливних сумішей в камері, другий...
Спосіб керування рухами людини
Номер патенту: 41795
Опубліковано: 10.06.2009
Автори: Вовк Майя Іванівна, Іванов Валентин Володимирович, Горбаньов Володимир Миколайович, Шевченко Анатолій Борисович, Алєєв Леонид Седекович
МПК: A61N 1/36
Мітки: рухами, керування, спосіб, людини
Формула / Реферат:
Спосіб керування рухами людини шляхом стимуляції вибраного нервово-м'язового комплексу людини електричними сигналами, які керуються по одному або декількох параметрах сигналами біоелектричної активності, який відрізняється тим, що сигнали біоелектричної активності відводять з рухових одиниць м'язів тієї ж людини, функціонально не завантажених під час електростимуляції, переважно з м'язів, симетричних тим, скороченнями яких керують.
Намотувальна машина для термопластичних ниток, яка діє з роз’єднаними рухами

Номер патенту: 84008
Опубліковано: 10.09.2008
Автори: Нолє Крістоф, Бувьє Жан-Марк, Воллє Жером
МПК: B65H 67/04, B65H 54/28
Мітки: рухами, роз'єднаними, машина, діє, термопластичних, яка, намотувальна, ниток
Формула / Реферат:
1. Намотувальна машина (1), яка, по суті, складається зі станини (2), що містить щонайменше два шпинделі (6, 7), прикріплені до барабана (5); причому згадані шпинделі, з одного боку, виконані з можливістю встановлення на них щонайменше одного кулича, і, з іншого боку, з можливістю обертання навколо першої осі, по суті, перпендикулярній діаметру кулича; і щонайменше один позиціонуючий і направляючий пристрій (8), який позиціонує і направляє...
Спосіб керування роботою машини із коливними рухами робочих органів
Номер патенту: 10971
Опубліковано: 15.12.2005
Автори: Пашистий Вадим Ананієвич, Берник Павло Степанович, Чубик Роман Васильович
МПК: B65G 27/10
Мітки: спосіб, робочих, роботою, керування, органів, коливними, машини, рухами
Формула / Реферат:
1. Спосіб керування роботою машин з коливними рухами робочих органів, при якому за допомогою системи керування приводом відслідковують власну частоту коливань механічної системи, підтримуючи режим роботи машини близьким до резонансного, який відрізняється тим, що в процесі роботи машини через систему керування безперервно контролюють два параметри - частоту та амплітуду коливань робочого органа, і у випадку зміни завантаження робочого органа...