Мехатронний пристрій для переміщення технологічного обладнання в трубопроводах
Номер патенту: 112381
Опубліковано: 12.12.2016
Автори: Аврука Ірина Сергіївна, Древецький Володимир Володимирович



Формула / Реферат
Мехатронний пристрій для переміщення технологічного обладнання в трубопроводах, який складається з корпусу, носової та хвостової розпірних частин, виконаних у вигляді герметично охопленого еластичною оболонкою пустотілого перфорованого циліндра, системи живлення стиснутим середовищем з каналами і лінією живлення, яка з'єднується з хвостовою та носовою розпірними частинами, який відрізняється тим, що в хвостовій камері додатково встановлено впускний розподілювач та електродвигун, який зв'язаний з енкодером та гнучкою муфтою, що являє собою гнучку черв'ячну передачу, а до корпусу за допомогою шарніра прикріплена платформа з отворами для закріплення технологічного обладнання, яка опирається на підпружинені колеса.
Текст
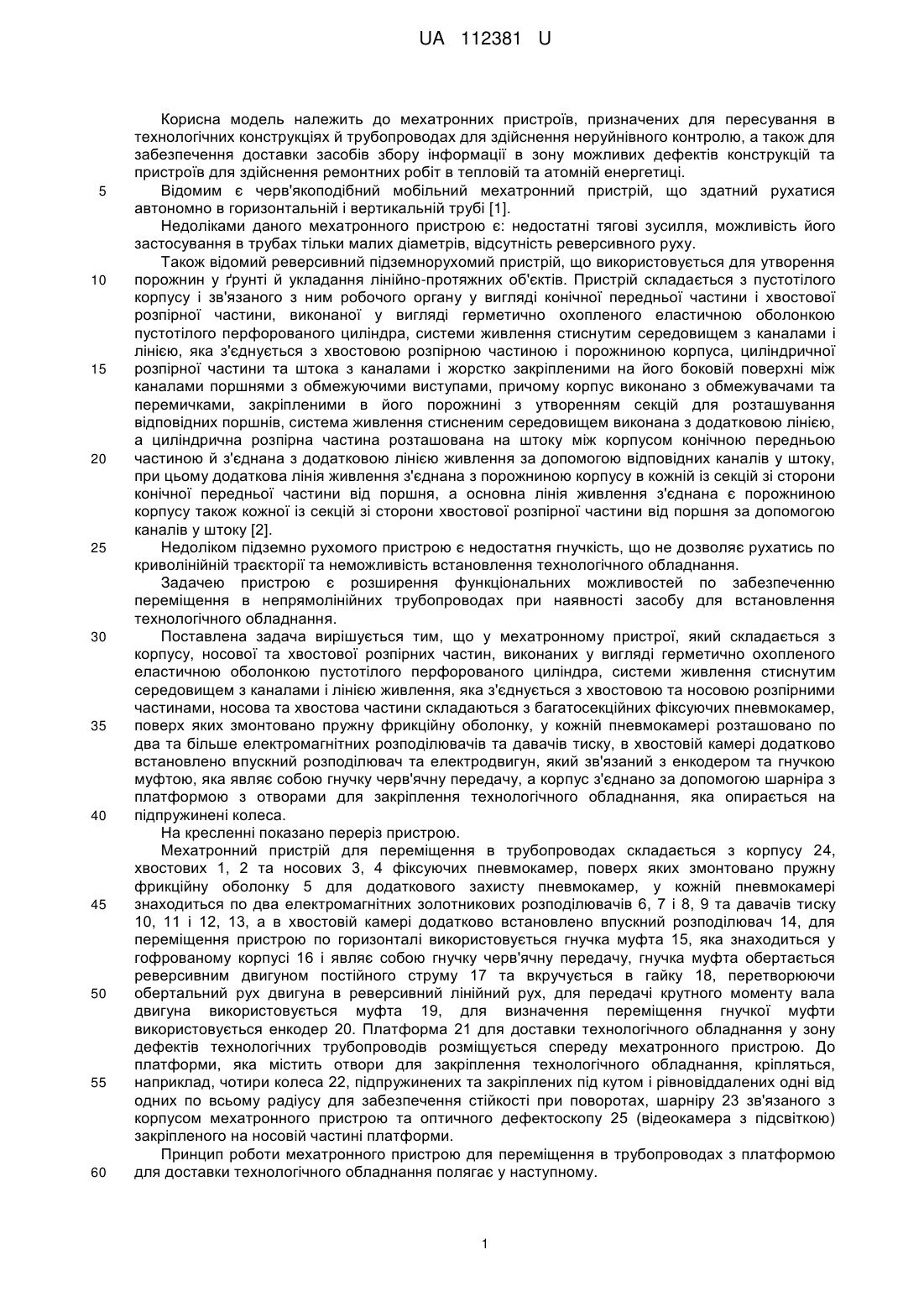
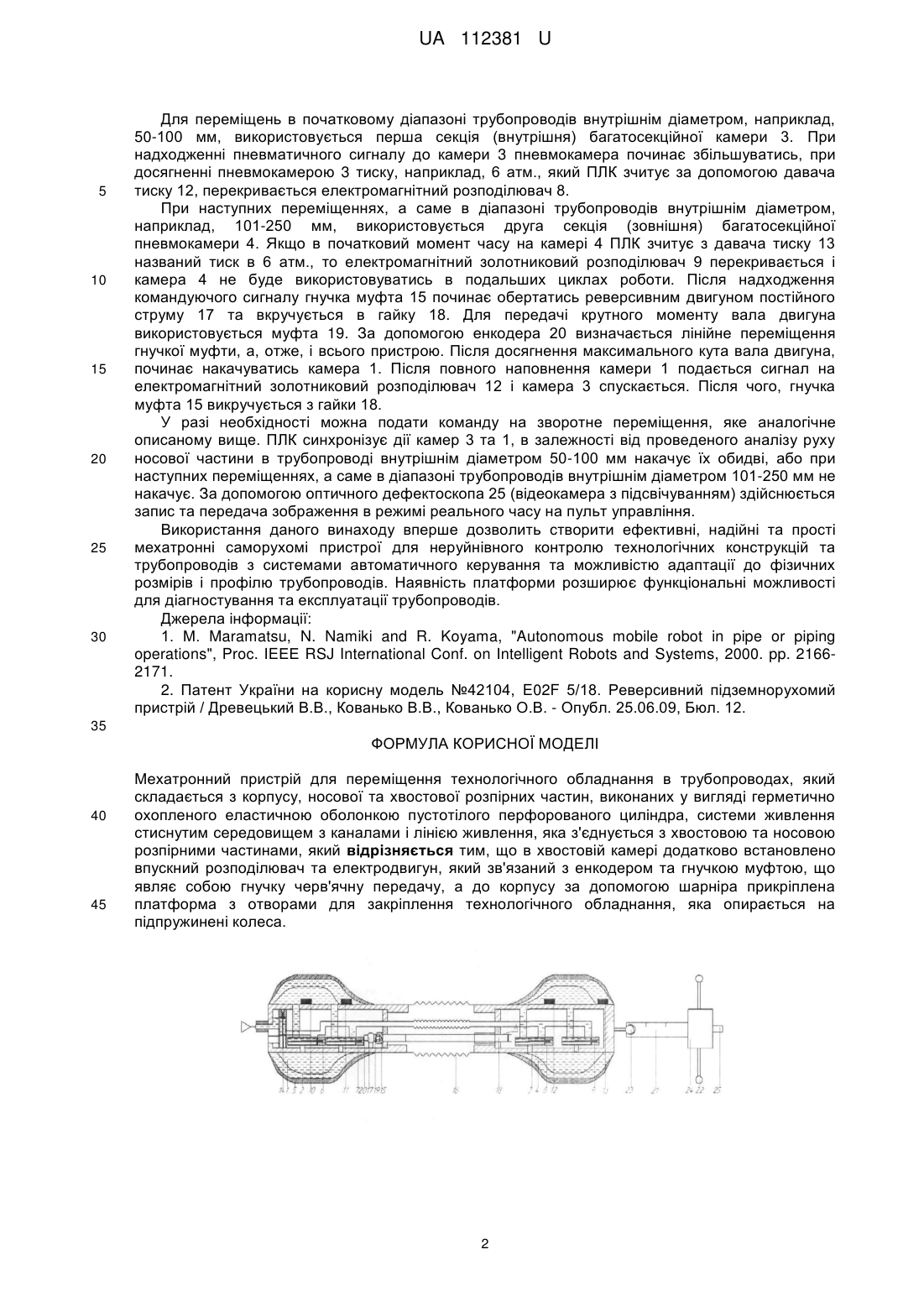
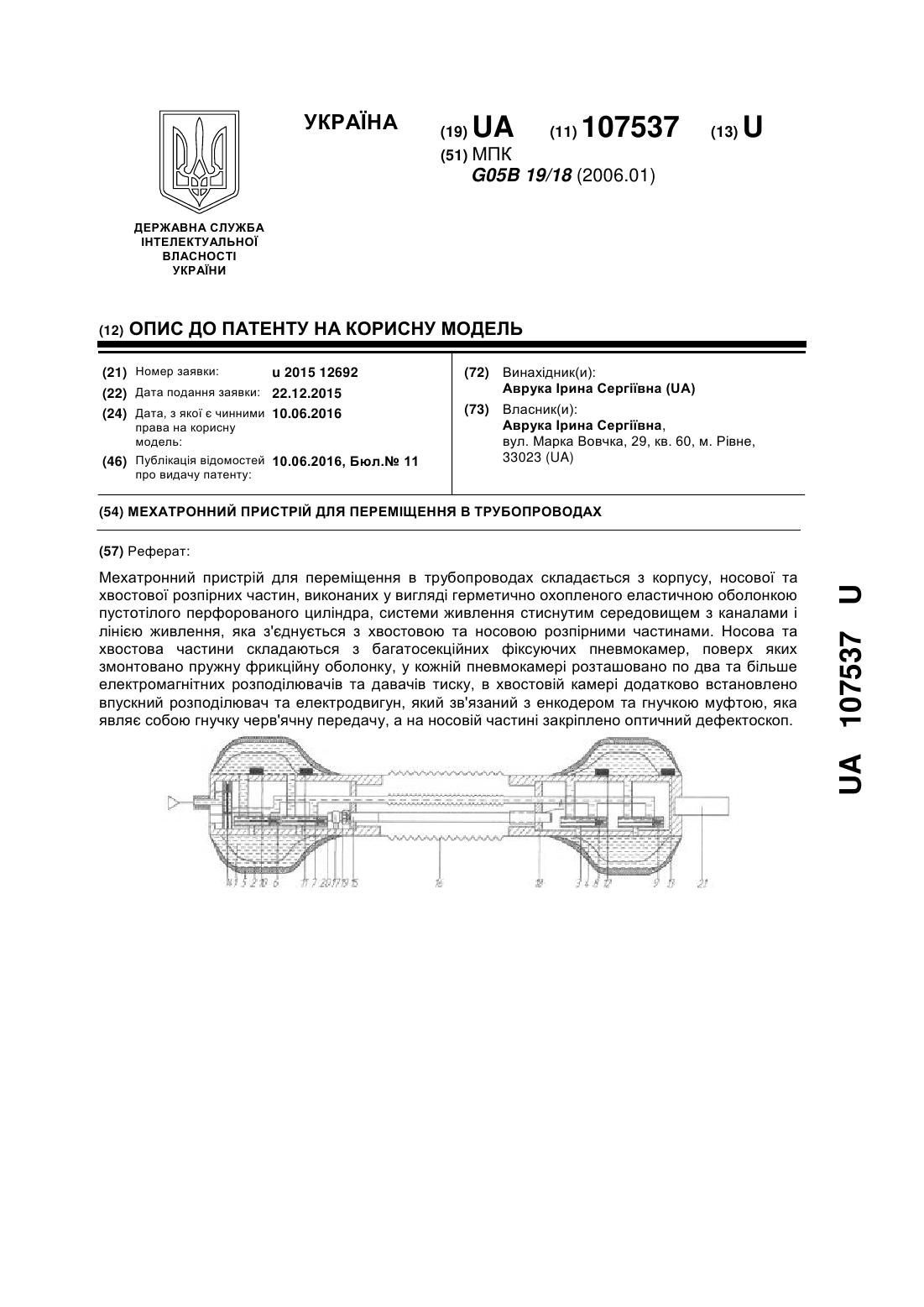
Реферат: Мехатронний пристрій для переміщення технологічного обладнання в трубопроводах складається з корпусу, носової та хвостової розпірних частин, виконаних у вигляді герметично охопленого еластичною оболонкою пустотілого перфорованого циліндра, системи живлення стиснутим середовищем з каналами і лінією живлення, яка з'єднується з хвостовою та носовою розпірними частинами. В хвостовій камері додатково встановлено впускний розподілювач та електродвигун, який зв'язаний з енкодером та гнучкою муфтою, що являє собою гнучку черв'ячну передачу. До корпусу за допомогою шарніра прикріплена платформа з отворами для закріплення технологічного обладнання, яка опирається на підпружинені колеса. UA 112381 U (12) UA 112381 U UA 112381 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до мехатронних пристроїв, призначених для пересування в технологічних конструкціях й трубопроводах для здійснення неруйнівного контролю, а також для забезпечення доставки засобів збору інформації в зону можливих дефектів конструкцій та пристроїв для здійснення ремонтних робіт в тепловій та атомній енергетиці. Відомим є черв'якоподібний мобільний мехатронний пристрій, що здатний рухатися автономно в горизонтальній і вертикальній трубі [1]. Недоліками даного мехатронного пристрою є: недостатні тягові зусилля, можливість його застосування в трубах тільки малих діаметрів, відсутність реверсивного руху. Також відомий реверсивний підземнорухомий пристрій, що використовується для утворення порожнин у ґрунті й укладання лінійно-протяжних об'єктів. Пристрій складається з пустотілого корпусу і зв'язаного з ним робочого органу у вигляді конічної передньої частини і хвостової розпірної частини, виконаної у вигляді герметично охопленого еластичною оболонкою пустотілого перфорованого циліндра, системи живлення стиснутим середовищем з каналами і лінією, яка з'єднується з хвостовою розпірною частиною і порожниною корпуса, циліндричної розпірної частини та штока з каналами і жорстко закріпленими на його боковій поверхні між каналами поршнями з обмежуючими виступами, причому корпус виконано з обмежувачами та перемичками, закріпленими в його порожнині з утворенням секцій для розташування відповідних поршнів, система живлення стисненим середовищем виконана з додатковою лінією, а циліндрична розпірна частина розташована на штоку між корпусом конічною передньою частиною й з'єднана з додатковою лінією живлення за допомогою відповідних каналів у штоку, при цьому додаткова лінія живлення з'єднана з порожниною корпусу в кожній із секцій зі сторони конічної передньої частини від поршня, а основна лінія живлення з'єднана є порожниною корпусу також кожної із секцій зі сторони хвостової розпірної частини від поршня за допомогою каналів у штоку [2]. Недоліком підземно рухомого пристрою є недостатня гнучкість, що не дозволяє рухатись по криволінійній траєкторії та неможливість встановлення технологічного обладнання. Задачею пристрою є розширення функціональних можливостей по забезпеченню переміщення в непрямолінійних трубопроводах при наявності засобу для встановлення технологічного обладнання. Поставлена задача вирішується тим, що у мехатронному пристрої, який складається з корпусу, носової та хвостової розпірних частин, виконаних у вигляді герметично охопленого еластичною оболонкою пустотілого перфорованого циліндра, системи живлення стиснутим середовищем з каналами і лінією живлення, яка з'єднується з хвостовою та носовою розпірними частинами, носова та хвостова частини складаються з багатосекційних фіксуючих пневмокамер, поверх яких змонтовано пружну фрикційну оболонку, у кожній пневмокамері розташовано по два та більше електромагнітних розподілювачів та давачів тиску, в хвостовій камері додатково встановлено впускний розподілювач та електродвигун, який зв'язаний з енкодером та гнучкою муфтою, яка являє собою гнучку черв'ячну передачу, а корпус з'єднано за допомогою шарніра з платформою з отворами для закріплення технологічного обладнання, яка опирається на підпружинені колеса. На кресленні показано переріз пристрою. Мехатронний пристрій для переміщення в трубопроводах складається з корпусу 24, хвостових 1, 2 та носових 3, 4 фіксуючих пневмокамер, поверх яких змонтовано пружну фрикційну оболонку 5 для додаткового захисту пневмокамер, у кожній пневмокамері знаходиться по два електромагнітних золотникових розподілювачів 6, 7 і 8, 9 та давачів тиску 10, 11 і 12, 13, а в хвостовій камері додатково встановлено впускний розподілювач 14, для переміщення пристрою по горизонталі використовується гнучка муфта 15, яка знаходиться у гофрованому корпусі 16 і являє собою гнучку черв'ячну передачу, гнучка муфта обертається реверсивним двигуном постійного струму 17 та вкручується в гайку 18, перетворюючи обертальний рух двигуна в реверсивний лінійний рух, для передачі крутного моменту вала двигуна використовується муфта 19, для визначення переміщення гнучкої муфти використовується енкодер 20. Платформа 21 для доставки технологічного обладнання у зону дефектів технологічних трубопроводів розміщується спереду мехатронного пристрою. До платформи, яка містить отвори для закріплення технологічного обладнання, кріпляться, наприклад, чотири колеса 22, підпружинених та закріплених під кутом і рівновіддалених одні від одних по всьому радіусу для забезпечення стійкості при поворотах, шарніру 23 зв'язаного з корпусом мехатронного пристрою та оптичного дефектоскопу 25 (відеокамера з підсвіткою) закріпленого на носовій частині платформи. Принцип роботи мехатронного пристрою для переміщення в трубопроводах з платформою для доставки технологічного обладнання полягає у наступному. 1 UA 112381 U 5 10 15 20 25 30 Для переміщень в початковому діапазоні трубопроводів внутрішнім діаметром, наприклад, 50-100 мм, використовується перша секція (внутрішня) багатосекційної камери 3. При надходженні пневматичного сигналу до камери 3 пневмокамера починає збільшуватись, при досягненні пневмокамерою 3 тиску, наприклад, 6 атм., який ПЛК зчитує за допомогою давача тиску 12, перекривається електромагнітний розподілювач 8. При наступних переміщеннях, а саме в діапазоні трубопроводів внутрішнім діаметром, наприклад, 101-250 мм, використовується друга секція (зовнішня) багатосекційної пневмокамери 4. Якщо в початковий момент часу на камері 4 ПЛК зчитує з давача тиску 13 названий тиск в 6 атм., то електромагнітний золотниковий розподілювач 9 перекривається і камера 4 не буде використовуватись в подальших циклах роботи. Після надходження командуючого сигналу гнучка муфта 15 починає обертатись реверсивним двигуном постійного струму 17 та вкручується в гайку 18. Для передачі крутного моменту вала двигуна використовується муфта 19. За допомогою енкодера 20 визначається лінійне переміщення гнучкої муфти, а, отже, і всього пристрою. Після досягнення максимального кута вала двигуна, починає накачуватись камера 1. Після повного наповнення камери 1 подається сигнал на електромагнітний золотниковий розподілювач 12 і камера 3 спускається. Після чого, гнучка муфта 15 викручується з гайки 18. У разі необхідності можна подати команду на зворотне переміщення, яке аналогічне описаному вище. ПЛК синхронізує дії камер 3 та 1, в залежності від проведеного аналізу руху носової частини в трубопроводі внутрішнім діаметром 50-100 мм накачує їх обидві, або при наступних переміщеннях, а саме в діапазоні трубопроводів внутрішнім діаметром 101-250 мм не накачує. За допомогою оптичного дефектоскопа 25 (відеокамера з підсвічуванням) здійснюється запис та передача зображення в режимі реального часу на пульт управління. Використання даного винаходу вперше дозволить створити ефективні, надійні та прості мехатронні саморухомі пристрої для неруйнівного контролю технологічних конструкцій та трубопроводів з системами автоматичного керування та можливістю адаптації до фізичних розмірів і профілю трубопроводів. Наявність платформи розширює функціональні можливості для діагностування та експлуатації трубопроводів. Джерела інформації: 1. М. Maramatsu, N. Namiki and R. Koyama, "Autonomous mobile robot in pipe or piping operations", Proc. IEЕЕ RSJ International Conf. on Intelligent Robots and Systems, 2000. pp. 21662171. 2. Патент України на корисну модель №42104, E02F 5/18. Реверсивний підземнорухомий пристрій / Древецький В.В., Кованько В.В., Кованько О.В. - Опубл. 25.06.09, Бюл. 12. 35 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 Мехатронний пристрій для переміщення технологічного обладнання в трубопроводах, який складається з корпусу, носової та хвостової розпірних частин, виконаних у вигляді герметично охопленого еластичною оболонкою пустотілого перфорованого циліндра, системи живлення стиснутим середовищем з каналами і лінією живлення, яка з'єднується з хвостовою та носовою розпірними частинами, який відрізняється тим, що в хвостовій камері додатково встановлено впускний розподілювач та електродвигун, який зв'язаний з енкодером та гнучкою муфтою, що являє собою гнучку черв'ячну передачу, а до корпусу за допомогою шарніра прикріплена платформа з отворами для закріплення технологічного обладнання, яка опирається на підпружинені колеса. 2 UA 112381 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюDrevetskyi Volodymyr Volodymyrovych
Автори російськоюДревецкий Владимир Владимирович
МПК / Мітки
МПК: G05B 19/18
Мітки: пристрій, обладнання, технологічного, трубопроводах, мехатронний, переміщення
Код посилання
<a href="https://ua.patents.su/5-112381-mekhatronnijj-pristrijj-dlya-peremishhennya-tekhnologichnogo-obladnannya-v-truboprovodakh.html" target="_blank" rel="follow" title="База патентів України">Мехатронний пристрій для переміщення технологічного обладнання в трубопроводах</a>
Мехатронний пристрій для переміщення в трубопроводах
Номер патенту: 107537
Опубліковано: 10.06.2016
Автор: Аврука Ірина Сергіївна
МПК: G05B 19/18
Мітки: переміщення, мехатронний, пристрій, трубопроводах
Формула / Реферат:
Мехатронний пристрій для переміщення в трубопроводах, який складається з корпусу, носової та хвостової розпірних частин, виконаних у вигляді герметично охопленого еластичною оболонкою пустотілого перфорованого циліндра, системи живлення стиснутим середовищем з каналами і лінією живлення, яка з'єднується з хвостовою та носовою розпірними частинами, який відрізняється тим, що носова та хвостова частини складаються з багатосекційних фіксуючих...
Пристрій для автоматичного збору і обробки діагностичної інформації про технічний стан обладнання і хід технологічного процесу
Номер патенту: 76510
Опубліковано: 15.08.2006
Автори: Брехунов Олександр Васильович, Нечитайло Віктор Михайлович, Савенчук Сергій Васильович, Шеремет Володимир Олександрович, Кекух Анатолій Володимирович, Міщенко Петро Дмитрович, Козенко Георгій Володимирович, Шнипко Андрій Іванович, Мисько Степан Миколайович
МПК: G01M 7/00, G01D 21/00
Мітки: стан, інформації, обладнання, збору, діагностичної, хід, технологічного, процесу, обробки, пристрій, автоматичного, технічний
Формула / Реферат:
Пристрій для автоматичного збору і обробки діагностичної інформації про технічний стан обладнання і хід технологічного процесу, що містить первинні перетворювачі параметрів технічного стану механізмів, блок первинної обробки сигналів параметрів технічного стану механізмів, схему визначення діагностичної ситуації, блок введення уставок, блок формування оперативної бази даних, генератор часових міток, схему перезапису інформації, блок індикації...
Пристрій для перекриття потоку в трубопроводах, що з’єднуються
Номер патенту: 25743
Опубліковано: 27.08.2007
Автор: Торовець Анатолій Григорович
МПК: F16K 31/00
Мітки: з'єднуються, потоку, пристрій, перекриття, трубопроводах
Формула / Реферат:
Пристрій для перекриття потоку в трубопроводах, що з'єднуються, який містить твердий і гнучкий елементи, який відрізняється тим, що твердий елемент виконаний у вигляді послідовно з'єднаних трьох однакових сфер з центрами, розміщеними по осі трубопроводів, причому кінці трубопроводів, що з'єднуються, вільно розміщені в крайніх сферах, а гнучкий елемент виконаний у вигляді пружно-еластичних, великої і розміщеної в ній малої, оболонок, причому...
Вібростійкий електронагрівач технологічного обладнання
Номер патенту: 55777
Опубліковано: 27.12.2010
Автори: Андрощук Олександр Дмитрович, Заблодський Микола Миколайович, Розсипний Олександр Миколайович, Войтенко Валерій Іванович
МПК: H05B 3/34
Мітки: вібростійкий, обладнання, електронагрівач, технологічного
Формула / Реферат:
Вібростійкий електронагрівач технологічного обладнання, що містить струмопровідну нитку, зигзагоподібно розташовану у поперечному напрямку й закріплену в електроізоляційній тканині з утворенням секцій, розділених ділянками цієї тканини, а уздовж щонайменше однієї з її крайок покладені струмопідвідні нитки, з'єднані із струмопровідними нитками кожної секції на відповідних ділянках тканини, який відрізняється тим, що з'єднання струмопровідних...
Пристрій для діагностики та блокування потоку рідини або газу низького тиску в трубопроводах
Номер патенту: 56149
Опубліковано: 10.01.2011
Автори: Гусак Дмитро Юрійович, Ніколенко Олександр Сергійович, Горбань Андрій Олександрович, Гнєдов Олег Борисович, Ченчевий Валерій Геннадійович
МПК: E03F 7/00
Мітки: блокування, пристрій, діагностики, газу, рідини, трубопроводах, низького, тиску, потоку
Формула / Реферат:
Пристрій для діагностики та блокування потоку рідини або газу низького тиску в трубопроводах, що містить систему відеоспостереження, штовхач, систему вводу пристрою в трубопровід з кабелем зв'язку та повітроводом, робочий орган перекриття трубопроводу, який виконаний з еластичного матеріалу, відеомонітор та автономне джерело живлення, який відрізняється тим, що система відеоспостереження вмонтована всередину корпуса з пристроєм для...
Попередній патент: Система каналізації
Наступний патент: Енергоефективний будинок
Випадковий патент: Індукційний електронагрівник