Поперечний супорт токарного верстата з числовим програмним керуванням
Номер патенту: 112829
Опубліковано: 26.12.2016
Автори: Іщенко Людмила Володимирівна, Гречка Андрій Іванович, Лисенко Олександр Володимирович

Формула / Реферат
Поперечний супорт токарного верстата з числовим програмним керуванням, що містить корпус та привод переміщення револьверної головки, який відрізняється тим, що револьверна головка приєднана до платформи, що кріпиться до гільзи, яка на напрямних розміщена з ексцентриситетом у диску, що в свою чергу також на напрямних розміщений з ексцентриситетом у іншому диску, який обертається на напрямних корпусу, обидва диски мають свої приводи обертання та додатково оснащуються механізмом, що дозволяє перемикати режими роботи супорта, один з яких забезпечує рівнобіжне переміщення платформи, а інший - по радіусу навколо центру, проекція якого на основну площину напрямних співпадає з віссю шпинделя, причому радіус обертання може бути довільним, а положення цього центра вздовж осі шпинделя задається поздовжнім супортом.
Текст
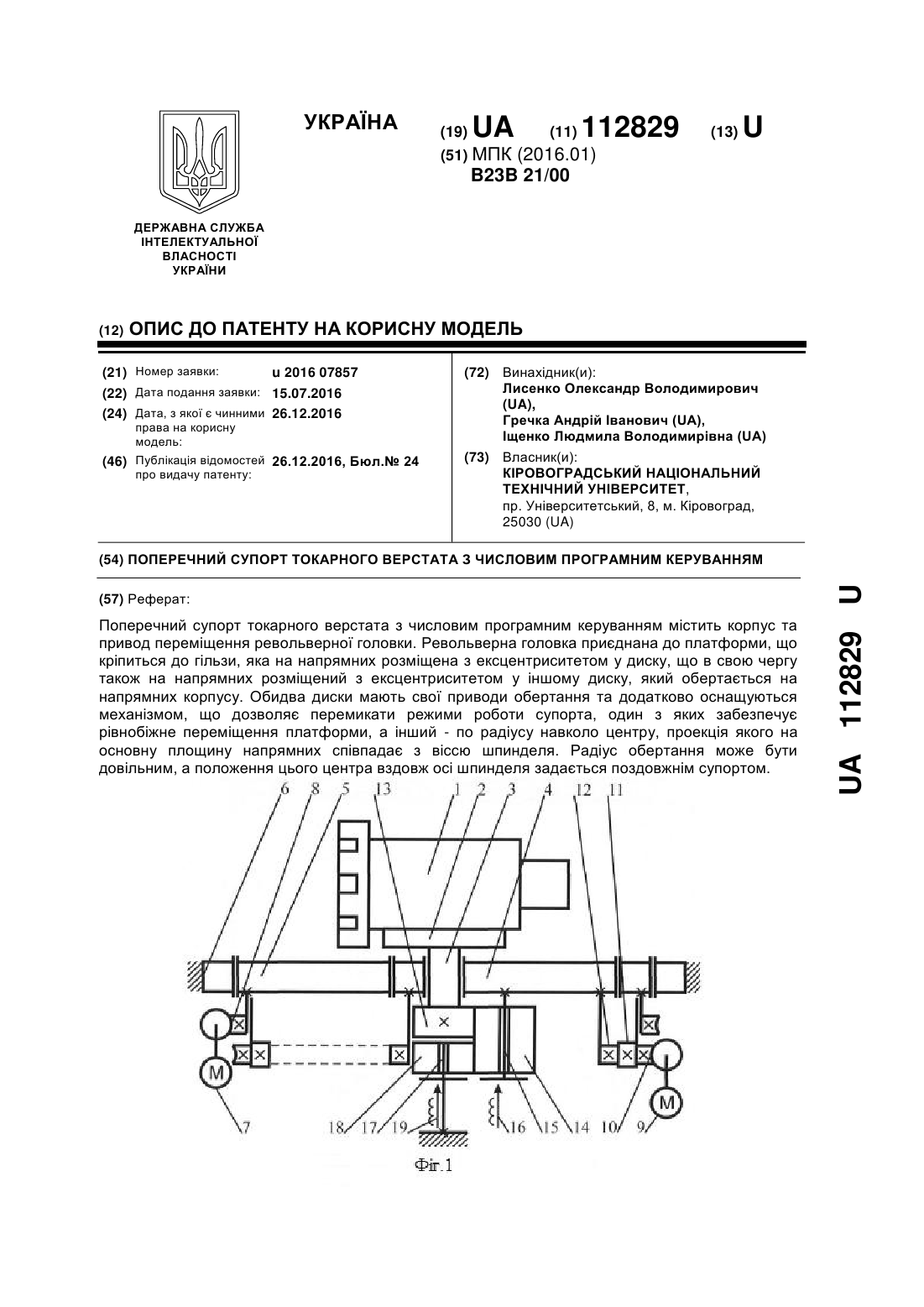
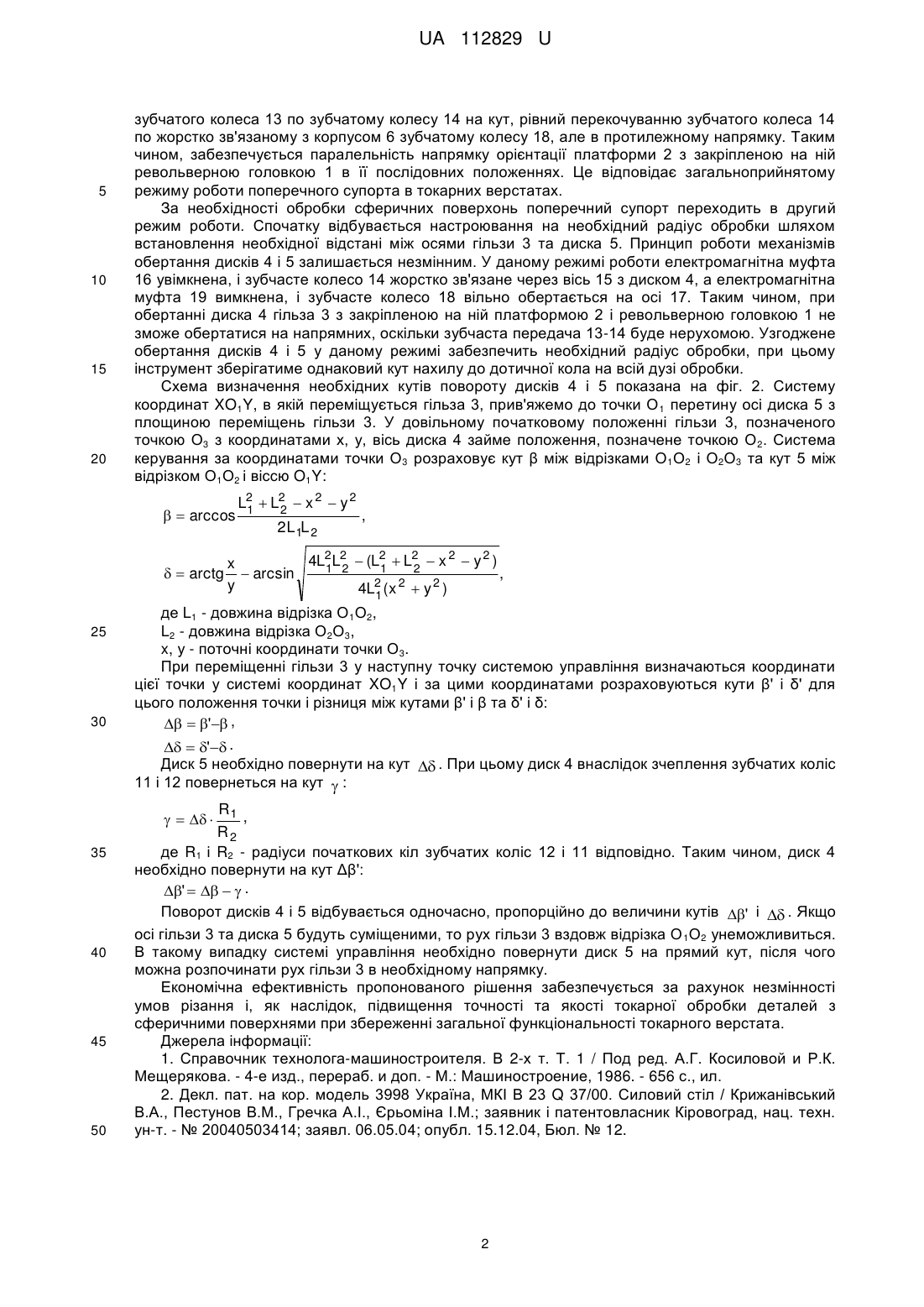
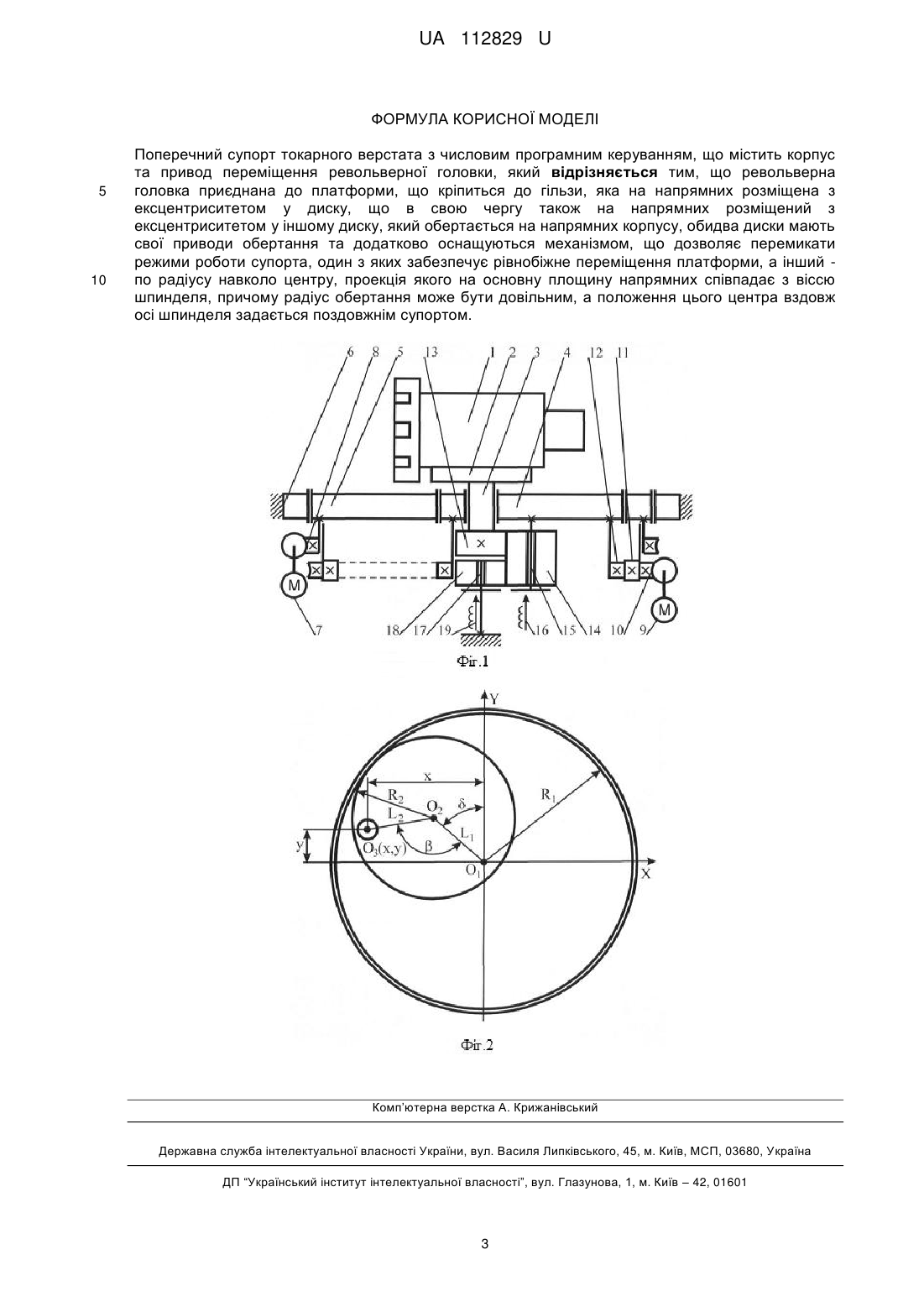
Реферат: Поперечний супорт токарного верстата з числовим програмним керуванням містить корпус та привод переміщення револьверної головки. Револьверна головка приєднана до платформи, що кріпиться до гільзи, яка на напрямних розміщена з ексцентриситетом у диску, що в свою чергу також на напрямних розміщений з ексцентриситетом у іншому диску, який обертається на напрямних корпусу. Обидва диски мають свої приводи обертання та додатково оснащуються механізмом, що дозволяє перемикати режими роботи супорта, один з яких забезпечує рівнобіжне переміщення платформи, а інший - по радіусу навколо центру, проекція якого на основну площину напрямних співпадає з віссю шпинделя. Радіус обертання може бути довільним, а положення цього центра вздовж осі шпинделя задається поздовжнім супортом. UA 112829 U (54) ПОПЕРЕЧНИЙ СУПОРТ ТОКАРНОГО ВЕРСТАТА З ЧИСЛОВИМ ПРОГРАМНИМ КЕРУВАННЯМ UA 112829 U UA 112829 U 5 10 15 20 25 30 35 40 45 50 55 60 Поперечний супорт токарного верстата з числовим програмним керуванням належить до верстатобудування. Відомі токарні верстати з числовим програмним керуванням, які мають поздовжній і поперечний супорт, що забезпечують переміщення револьверної головки у площині шляхом суміщення двох прямолінійних рухів [1]. Обробка сферичних поверхонь у відомих токарних верстатах з числовим програмним керуванням відбувається шляхом інтерполяції двох прямолінійних рухів, що призводить до зростання шорсткості поверхні та зміні умов різання внаслідок зміни кутів різання, що також погіршує якість обробки. Відомий силовий стіл, що забезпечує переміщення платформи у площині в результаті обертання двох дисків, причому платформа через гільзу ексцентрично розташована на напрямних у диску, що в свою чергу ексцентрично розташований на напрямних в іншому диску, кожен диск має свій механізм обертання, а платформа пов'язана з механізмом, який забезпечує паралельність напрямку її орієнтації [2]. У відомому силовому столі платформа не може здійснювати кутове переміщення. Задачею корисної моделі є підвищення точності і якості токарної обробки деталей з сферичними поверхнями шляхом забезпечення переміщення інструмента з незмінною орієнтацією щодо центра сфери. Поставлена задача вирішується тим, що у пропонованому поперечному супорті токарного верстата з числовим програмним керуванням револьверна головка приєднана до платформи, що кріпиться до гільзи, яка на напрямних розміщена з ексцентриситетом у диску, що в свою чергу також на напрямних розміщений з ексцентриситетом у іншому диску, який обертається на напрямних корпусу, обидва диски мають свої приводи обертання та додатково оснащуються механізмом, що дозволяє перемикати режими роботи супорта, один з яких забезпечує рівнобіжне переміщення платформи, а інший - по радіусу навколо центру, проекція якого на основну площину напрямних співпадає з віссю шпинделя, причому радіус обертання може бути довільним, а положення цього центра вздовж осі шпинделя задається поздовжнім супортом. Схема поперечного супорта токарного верстата з числовим програмним керуванням приведена на фіг. 1, схема його роботи - на фіг. 2. Револьверна головка 1 приєднана до платформи 2, що кріпиться до гільзи 3, яка на напрямних розміщена з ексцентриситетом у диску 4. Диск 4 на напрямних розміщений з ексцентриситетом у диску 5, який обертається на напрямних корпусу 6. Величини обох ексцентриситетів рівні. Диск 5 отримує обертання від електродвигуна 7 через черв'ячну передачу 8. Диск 4 отримує обертання від електродвигуна 9 через черв'ячну передачу 10 і зубчасту передачу 11-12, причому черв'ячне колесо передачі 10 і зубчасте колесо внутрішнього зачеплення жорстко з'єднані між собою і обертаються співвісно з черв'ячним колесом передачі 8, а зубчасте колесо 12 жорстко з'єднано з диском 4. До гільзи 3 жорстко приєднане зубчасте колесо 13, що входить в зачеплення з зубчастим колесом 14, яке обертається на осі 15, причому дана вісь розташована на одній прямій з центральною віссю диска 4. Зубчасте колесо 14 може жорстко з'єднуватися з віссю 15 за допомогою електромагнітної муфти 16. На одній прямій з центральною віссю диска 5 розташована вісь 17, на якій обертається зубчасте колесо 18, що входить в зачеплення з зубчастим колесом 14. Зубчасте колесо 18 може жорстко з'єднуватися з віссю 17 за допомогою електромагнітної муфти 19. Зубчасті колеса 13 і 18 мають однакові радіуси початкових кіл. Електромагнітні муфти 16 і 19 працюють в протифазі. Поперечний супорт токарного верстата з числовим програмним керуванням може працювати у двох режимах. В першому режимі забезпечується рівнобіжне переміщення платформи 2 з револьверною головкою 1 в площині обертання дисків 4 і 5. Лінійні координатні переміщення отримуються внаслідок узгоджених взаємних поворотів диска 5 з ексцентрично розташованим диском 4 та диска 4 з ексцентрично розташованою гільзою 3. При необхідності виконання руху гільзи 3 з платформою 2 і револьверною головкою 1 по прямому відрізку система управління визначає кут повороту диска 5 відносно корпусу 6 та диска 4 відносно диска 5. Диск 5 зв'язаний з корпусом 6 через електродвигун 7 і черв'ячну передачу 8. гільзу 10, а диск 4 зв'язаний з корпусом 6 через електродвигун 9, черв'ячну передачу 10 і зубчасту передачу 1112. Внаслідок перекочування зубчатого колеса 12 по зубчатому колесу 11 диск 4 отримує додатковий поворот. Система управління визначає величину додаткового повороту і корегує величину кута повороту диска 4. Таким чином, взаємно пов'язані повороти дисків 4 і 5 перетворюються у рух гільзи 3 по прямому відрізку у площині, перпендикулярній до її осі. Електромагнітна муфта 16 вимкнена, і зубчасте колесо 14 може вільно обертатися на осі 15, а електромагнітна муфта 19 увімкнена, і зубчасте колесо 18 жорстко зв'язане через вісь 17 з корпусом 6. Переміщення гільзи 3 супроводжується перекочуванням закріпленого на ній 1 UA 112829 U 5 10 15 20 зубчатого колеса 13 по зубчатому колесу 14 на кут, рівний перекочуванню зубчатого колеса 14 по жорстко зв'язаному з корпусом 6 зубчатому колесу 18, але в протилежному напрямку. Таким чином, забезпечується паралельність напрямку орієнтації платформи 2 з закріпленою на ній револьверною головкою 1 в її послідовних положеннях. Це відповідає загальноприйнятому режиму роботи поперечного супорта в токарних верстатах. За необхідності обробки сферичних поверхонь поперечний супорт переходить в другий режим роботи. Спочатку відбувається настроювання на необхідний радіус обробки шляхом встановлення необхідної відстані між осями гільзи 3 та диска 5. Принцип роботи механізмів обертання дисків 4 і 5 залишається незмінним. У даному режимі роботи електромагнітна муфта 16 увімкнена, і зубчасте колесо 14 жорстко зв'язане через вісь 15 з диском 4, а електромагнітна муфта 19 вимкнена, і зубчасте колесо 18 вільно обертається на осі 17. Таким чином, при обертанні диска 4 гільза 3 з закріпленою на ній платформою 2 і револьверною головкою 1 не зможе обертатися на напрямних, оскільки зубчаста передача 13-14 буде нерухомою. Узгоджене обертання дисків 4 і 5 у даному режимі забезпечить необхідний радіус обробки, при цьому інструмент зберігатиме однаковий кут нахилу до дотичної кола на всій дузі обробки. Схема визначення необхідних кутів повороту дисків 4 і 5 показана на фіг. 2. Систему координат XO1Y, в якій переміщується гільза 3, прив'яжемо до точки О 1 перетину осі диска 5 з площиною переміщень гільзи 3. У довільному початковому положенні гільзи 3, позначеного точкою О3 з координатами х, у, вісь диска 4 займе положення, позначене точкою О 2. Система керування за координатами точки О3 розраховує кут β між відрізками О1О2 і О2О3 та кут 5 між відрізком О1О2 і віссю O1Y: L2 L2 x 2 y 2 2 arccos 1 , 2 L 1L 2 arctg 25 30 4L2L2 (L2 L2 x 2 y 2 ) x 1 2 1 2 arcsin , y 4L2 ( x 2 y 2 ) 1 де L1 - довжина відрізка О1О2, L2 - довжина відрізка О2О3, x, у - поточні координати точки О3. При переміщенні гільзи 3 у наступну точку системою управління визначаються координати цієї точки у системі координат XO1Y і за цими координатами розраховуються кути β' і δ' для цього положення точки і різниця між кутами β' і β та δ' і δ: ' , ' . Диск 5 необхідно повернути на кут . При цьому диск 4 внаслідок зчеплення зубчатих коліс 11 і 12 повернеться на кут : R1 , R2 де R1 і R2 - радіуси початкових кіл зубчатих коліс 12 і 11 відповідно. Таким чином, диск 4 необхідно повернути на кут Δβ': ' . Поворот дисків 4 і 5 відбувається одночасно, пропорційно до величини кутів ' і . Якщо осі гільзи 3 та диска 5 будуть суміщеними, то рух гільзи 3 вздовж відрізка О 1О2 унеможливиться. В такому випадку системі управління необхідно повернути диск 5 на прямий кут, після чого можна розпочинати рух гільзи 3 в необхідному напрямку. Економічна ефективність пропонованого рішення забезпечується за рахунок незмінності умов різання і, як наслідок, підвищення точності та якості токарної обробки деталей з сферичними поверхнями при збереженні загальної функціональності токарного верстата. Джерела інформації: 1. Справочник технолога-машиностроителя. В 2-х т. Т. 1 / Под ред. А.Г. Косиловой и Р.К. Мещерякова. - 4-е изд., перераб. и доп. - М.: Машиностроение, 1986. - 656 с., ил. 2. Декл. пат. на кор. модель 3998 Україна, МКІ В 23 Q 37/00. Силовий стіл / Крижанівський В.А., Пестунов В.М., Гречка А.І., Єрьоміна І.М.; заявник і патентовласник Кіровоград, нац. техн. ун-т. - № 20040503414; заявл. 06.05.04; опубл. 15.12.04, Бюл. № 12. 35 40 45 50 2 UA 112829 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 Поперечний супорт токарного верстата з числовим програмним керуванням, що містить корпус та привод переміщення револьверної головки, який відрізняється тим, що револьверна головка приєднана до платформи, що кріпиться до гільзи, яка на напрямних розміщена з ексцентриситетом у диску, що в свою чергу також на напрямних розміщений з ексцентриситетом у іншому диску, який обертається на напрямних корпусу, обидва диски мають свої приводи обертання та додатково оснащуються механізмом, що дозволяє перемикати режими роботи супорта, один з яких забезпечує рівнобіжне переміщення платформи, а інший по радіусу навколо центру, проекція якого на основну площину напрямних співпадає з віссю шпинделя, причому радіус обертання може бути довільним, а положення цього центра вздовж осі шпинделя задається поздовжнім супортом. Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B23B 21/00
Мітки: керуванням, поперечний, верстата, програмним, токарного, супорт, числовим
Код посилання
<a href="https://ua.patents.su/5-112829-poperechnijj-suport-tokarnogo-verstata-z-chislovim-programnim-keruvannyam.html" target="_blank" rel="follow" title="База патентів України">Поперечний супорт токарного верстата з числовим програмним керуванням</a>
Спосіб обробки отворів великих діаметрів на важких токарних верстатах з числовим програмним керуванням
Номер патенту: 75834
Опубліковано: 10.12.2012
Автор: Хорошайло Вадим Вікторович
МПК: B23B 1/00
Мітки: важких, керуванням, обробки, токарних, діаметрів, отворів, спосіб, числовим, програмним, великих, верстатах
Формула / Реферат:
Спосіб обробки отворів великих діаметрів на важких токарних верстатах з числовим програмним керуванням шляхом фрезерування, який відрізняється тим, що обертання фрези навколо своєї осі та її поздовжнє переміщення здійснюється фрезерним супортом, а рух кругової подачі виконується деталлю, закріпленою на планшайбі.
Токарний верстат з числовим програмним керуванням для обробки полігональних поверхонь
Номер патенту: 25411
Опубліковано: 10.08.2007
Автори: Кузнєцов Юрій Миколайович, Кулаков Іван Сергійович, Самойленко Олексій Васильович
МПК: B23B 41/00, B23B 5/00
Мітки: токарний, поверхонь, верстат, полігональних, числовим, керуванням, обробки, програмним
Формула / Реферат:
Токарний верстат з числовим програмним керуванням для обробки полігональних поверхонь, що містить робочий шпиндельний вузол, розміщений в передній бабці та оснащений приводом обертання і датчиком кутового положення заготовки, а також супорт, що встановлений з можливістю переміщення щонайменше вздовж поздовжньої та поперечної осей, оснащений датчиками положення вздовж цих осей, який відрізняється тим, що супорт містить інструментальний...
Стенд функціонального контролю і діагностики токарних верстатів з числовим програмним керуванням
Номер патенту: 37797
Опубліковано: 10.12.2008
Автори: Нестеренко Олександр Сергійович, Фоменко Андрій Миколайович, Шарейко Дмитро Юрійович
МПК: G05B 23/02
Мітки: токарних, програмним, контролю, керуванням, верстатів, числовим, стенд, діагностики, функціонального
Формула / Реферат:
1. Стенд функціонального контролю і діагностики токарних верстатів з числовим програмним керуванням, що містить персональний комп'ютер, сполучений з пристроєм числового програмного керування через роз'єм інтерфейсу фотозчитуючого пристрою, пристрій числового програмного керування, сполучений з асинхронним електроприводом, електропривод асинхронний, сполучений з електродвигунами двох механізмів подачі і електродвигуном шпинделя, три асинхронні...
Агрегатний верстат з числовим програмним керуванням
Номер патенту: 95596
Опубліковано: 25.12.2014
Автори: Луцький Сергій Володимирович, Сорокін Володимир Федорович, Шандиба Олена Василівна, Біловол Ганна Володимирівна, Тернюк Ігор Олександрович
МПК: B23Q 41/00, B23Q 39/00
Мітки: керуванням, верстат, агрегатний, числовим, програмним
Формула / Реферат:
Агрегатний верстат з числовим програмним керуванням (ЧПК), що має станину з внутрішньою порожниною і плитою на ній, поворотний ділильний стіл на плиті з приводом, механізми підйому і повороту столу з приводами, розташовані в станині, блок ЧПК, а також агрегатні головки зі шпинделями, що мають приводи, при цьому на корпусі поворотного ділильного столу закріплений установочно-затискний пристрій, плита має центральну і бічну частини, на бічній...
Супорт токарного верстата
Номер патенту: 62204
Опубліковано: 15.12.2003
Автори: Ковальов Віктор Дмитрович, Бабін Олег Фавійович, Гаков Сергій Олександрович
МПК: B23B 21/00
Мітки: токарного, супорт, верстата
Формула / Реферат:
Супорт токарного верстата, що містить вібратор, який являє собою пасивний демпфер, різцетримач, встановлений на супорт, різець, який відрізняється тим, що супорт оснащений вібратором, який являє собою активний демпфер і складається з гідравлічного циліндра малого ходу, взаємодіючого зі стежучим приводом, на базі лінійного двигуна з гідропідсилювачем і зв'язаний з датчиком вібрацій, встановленим на різці.