Спосіб дистанційного вимірювання глибини водойми з повітряного судна
Номер патенту: 114428
Опубліковано: 12.06.2017
Автори: Мамонтова Людмила Степанівна, Бурачек Всеволод Германович, Донець Володимир Володимирович, Крячок Сергій Дмитрович
Формула / Реферат
Спосіб дистанційного вимірювання глибини водойми з повітряного судна, що оснований на батиметричному двопроменевому методі вимірювань у видимому і інфрачервоному діапазонах, який відрізняється тим, що вимірювання виконуються в динаміці з розгойдуванням частоти випромінювання в межах відповідних діапазонів вимірювання рельєфу дна і глибини водойми, причому в кожному діапазоні змішуються у приймальному каналі відбиті і випромінювані імпульси відповідних частот, порівнюють отриману змішану частоту ![]() , поділену навпіл, з частотою випромінювання, в момент співпадіння цих частот отримують подвоєну частоту
, поділену навпіл, з частотою випромінювання, в момент співпадіння цих частот отримують подвоєну частоту ![]() , надходження випромінюваних та відбитих імпульсів видимого діапазону та подвоєну частоту
, надходження випромінюваних та відбитих імпульсів видимого діапазону та подвоєну частоту ![]() надходження випромінюваних та відбитих імпульсів інфрачервоного діапазону, а глибина водойми визначають за формулою:
надходження випромінюваних та відбитих імпульсів інфрачервоного діапазону, а глибина водойми визначають за формулою:
![]() ,
,
де
![]() - число періодів частоти
- число періодів частоти ![]() в каналі видимого діапазону;
в каналі видимого діапазону;
![]() - число періодів частоти
- число періодів частоти ![]() в каналі інфрачервоного діапазону;
в каналі інфрачервоного діапазону;
![]() ,
, ![]() - цілі непарні числа;
- цілі непарні числа;
![]() - коефіцієнт, який враховує зміну швидкості світла у водному середовищі.
- коефіцієнт, який враховує зміну швидкості світла у водному середовищі.
![]() - швидкість світла в атмосфері.
- швидкість світла в атмосфері.
Текст
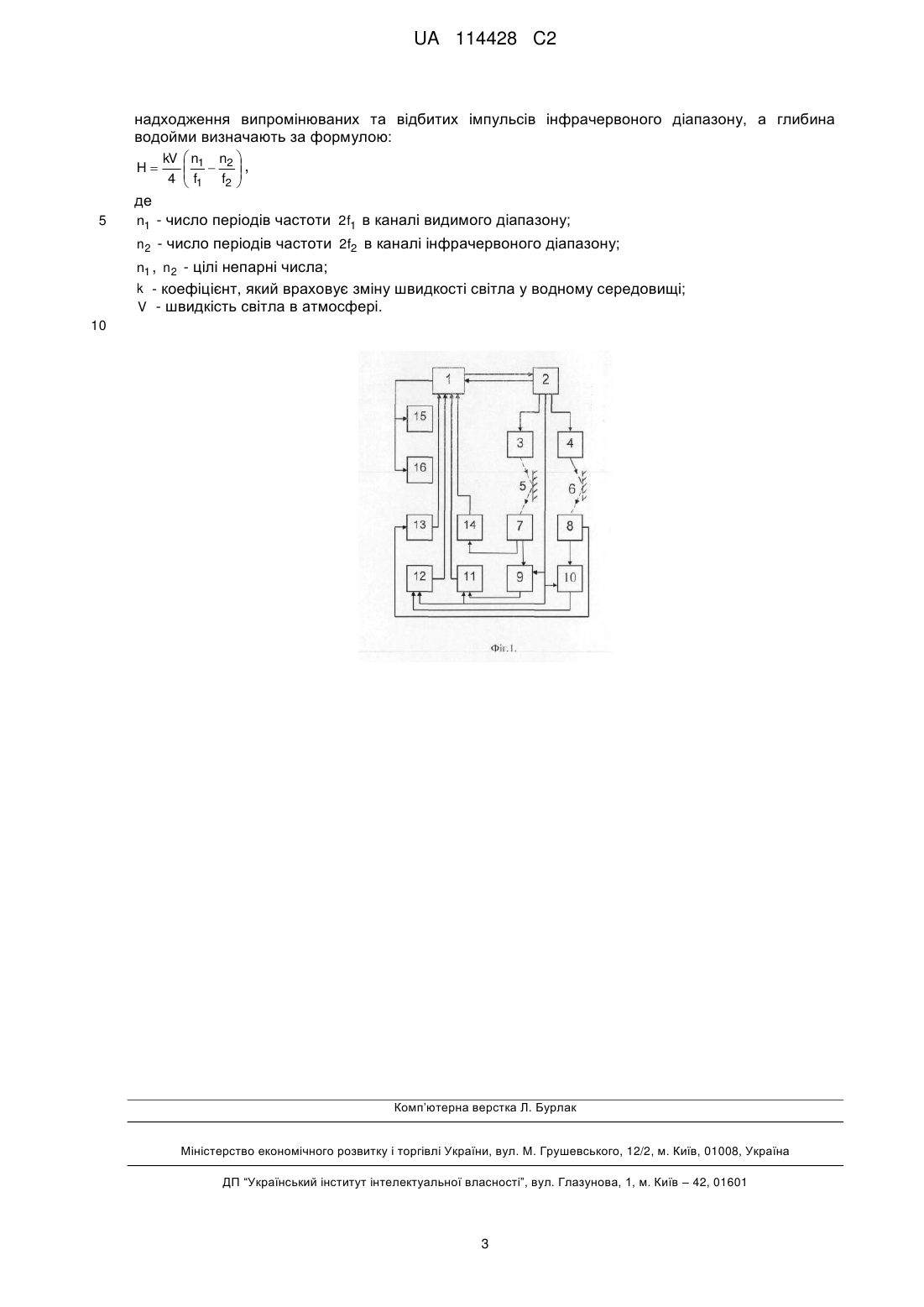
Реферат: Запропонований спосіб належить до області дистанційного зондування Землі, зокрема до дистанційних геодезичних світловіддалемірних вимірювань. Спосіб дистанційного вимірювання глибини водойми з повітряного судна, що оснований на батиметричному двопроменевому методі вимірювань у видимому і інфрачервоному діапазонах, згідно з винаходом, в кожному діапазоні змішуються у приймальному каналі відбиті і випромінювані (прямі) імпульси, при цьому вимірювання виконуються в динаміці з розгойдуванням частоти f випромінювання в межах відповідних діапазонів вимірювання рельєфу дна і глибина водойми визначається шляхом порівняння змішаної частоти f, поділеної навпіл, з частотою випромінювання в момент співпадіння (рівності) цих частот за формулою kV 2 n1 n 2 f f 2 1 , UA 114428 C2 (12) UA 114428 C2 де f1 - частота надходження випромінюваних та відбитих імпульсів видимого діапазону; f2, - частота надходження випромінюваних та відбитих імпульсів інфрачервоного діапазону; n1 - число періодів частоти f1 в каналі видимого діапазону; n2 - число періодів частоти f2 в каналі інфрачервоного діапазону; n1, n2 - цілі непарні числа; k - коефіцієнт, який враховує зміну швидкості світла у водному середовищі. Технічним результатом є підвищення точності визначення глибини водойми. UA 114428 C2 5 10 15 20 25 30 35 40 Запропонований спосіб належить до області дистанційного зондування Землі, зокрема до дистанційних геодезичних світловіддалемірних вимірювань. Відомі світлолокаційні способи вимірювання дальності, наприклад світловіддалемірний спосіб вимірювання відстані від випромінювача до відбивача, основані на вимірюванні часових інтервалів проходження випромінювальним імпульсом відстані від випромінювача до відбивача і назад [1]. Недоліком цього способу є низька точність визначення часу. Більш точним є фазовий метод, що припускає створення безперервних гармонійних коливань уздовж лінії від випромінювача до об'єкта і назад. Коливання, що виробляє випромінювач, проходять вимірювальну відстань, відбиваються від об'єкта, знову проходять ту ж дистанцію і приймаються приймачем. Одночасно на приймач подаються коливання випромінювача безпосередньо. Як вимірювальний пристрій використовується фазометр, що вимірює різницю фаз між прямими (безпосередніми) і відбитими від об'єкта коливаннями, що пройшли подвійну відстань між випромінювачем (приймачем) і об'єктом. При відомій частоті випромінюваних коливань, швидкості розповсюдження їх у повітрі й виміряній різниці фаз між прямими і відбитими коливаннями визначається відстань до об'єкта [2]. Фазові методи дозволяють вимірювати відстань з геодезичною точністю при частоті випромінюваних коливань не менше 10 МГц. Недоліком фазового методу є складність апаратури, а сама методика виконання вимірювань не передбачає вимірювання відстані під час руху випромінювача (вимірювального пристрою) або об'єкта, відстань, до якого визначається, тобто сама методика виконання вимірювань обмежена в застосуванні. Більш точним, ніж фазовий, є спосіб [3], оснований на змішуванні в приймачі відбитих і випромінюваних імпульсів з подвоєнням частоти випромінюваних імпульсів і подальшим частотним вимірюванням відстані. Недоліком такого способу, як і фазового, є неможливість вимірювання відстані між рухомими об'єктами під час руху випромінювача світловіддалеміра. В [4] описаний спосіб двопроменевої локації водних об'єктів. Для сканування товщі води застосовуються частоти зеленого і інфрачервоного спектрів випромінювання світла. Цей спосіб може бути аналогом запропонованому способу, який приймається за прототип. Задачею винаходу є створення способу дистанційних світловіддалемірних вимірювань, що забезпечать визначення глибини водойми з літаючого апарата з підвищеною точністю. Поставлена задача вирішується за рахунок створення способу дистанційного вимірювання глибини водойми з повітряного судна, що оснований на батиметричному двопроменевому методі вимірювань у видимому і інфрачервоному діапазонах, який відрізняється тим, що вимірювання виконуються в динаміці з розгойдуванням частоти випромінювання в межах відповідних діапазонів вимірювання рельєфу дна і глибини водойми, причому в кожному діапазоні змішуються у приймальному каналі відбиті і випромінювані імпульси відповідних частот, порівнюють отриману змішану частоту, змішану частоту f , поділену навпіл, з частотою випромінювання, в момент співпадіння цих частот отримують подвоєну частоту f1 надходження випромінюваних та відбитих імпульсів видимого діапазону та подвоєну частоту f2 надходження випромінюваних та відбитих імпульсів інфрачервоного діапазону, а глибина водойми визначається за формулою: H 45 kV 4 n1 n2 f 1 f2 , де n1 - число періодів частоти 2f1 в каналі видимого діапазону; n2 - число періодів частоти 2f2 в каналі інфрачервоного діапазону; n1 , n2 - цілі непарні числа; k - коефіцієнт, який враховує зміну швидкості світла у водному середовищі. 50 55 V - швидкість світла в атмосфері. Пристрій працює наступним чином. Блок 1 вмикає інші блоки пристрою та подає команду на блок 2, задаючи зміну діапазону коливань частоти fu випромінювання в межах вимірювання глибини водойми і рельєфу дна. За сигналом блока 2 блоки 3 та 4 випромінюють імпульси світлових сигналів. Блок 3 у - видимому діапазоні, блок 4 - у інфрачервоному діапазоні, які надходять до поверхонь відбиття: (5 - дна водойми та 6 - водна поверхня). Відбиті від відповідної поверхні імпульси надходять до приймачів: 7 - видимого діапазону і 8 1 UA 114428 C2 інфрачервоного діапазону. Далі світлові сигнали перетворюються у електричні з частотою перебігу f0 відбитих імпульсів відповідно в блоках 9 та 10. Одночасно в блок 9 та 10 надходять 5 електричні сигнали з блока 2 з частотою випромінювання fu (прямі імпульси). В блока 9 та 10 частоти змішуються порізно для двох каналів - видимого та інфрачервоного діапазонів. При цьому f0 fu . Під час коливань частоти в блоці 2 змінюється проміжок часу затримки між прямими та відбитими сигналами. В момент, коли в одному з каналів, наприклад у каналі T u 2 , де Tu - період частоти fu , в видимого діапазону цей часовий інтервал буде дорівнювати 10 змішувачі 9 виникає подвійна частота f 2fu , яка з блока 9 надходить в блок 11. В блоці 11 частота f ділиться на 2. Також в блок 11 з блока 2 надходить поточна частота випромінювання f fu , яка порівнюється з частотою 2 . Після збігу цих частот сигнали з блока 11 надходять до 15 f fu блока 1. В блок 1 надходять також з блока 2 значення поточної частоти на момент збігу 2 . Аналогічні перетворення виконуються в блоках 4, 6, 8, 10, 12 та блоці 1 стосовно f fu інфрачервоного діапазону. В моменти збігу частот 2 з датчиків 13 (канал видимого діапазону) та 14 (канал інфрачервоного діапазону) в блок 1 надходять імпульси (прямі та відбиті) для почергового зчитування їх в імпульсно-часовому режимі. В блоці 1 обчислюється ' ' приблизна відстань H1 - для видимого і H 2 - для інфрачервоного діапазонів за формулами ' H1 Vt1 , H'2 Vt 2 20 , де t1 , t 2 - інтервали часу між випромінюваним та відбитим імпульсами, відповідно. В блоці 1 обчислюються число періодів подвоєної частоти f1 видимого діапазону для моменту t1 співпадіння випромінюваної та половиною змішаної частот ' 4H1f1 V , і для каналу інфрачервоного діапазону n1 4H'2f2 V , які заокруглюються до цілих непарних чисел. У підсумку визначають глибину водойми за формулою n2 25 n1 n2 f 1 f2 . Таким чином, запропонований спосіб дистанційного вимірювання глибини водойми з повітряного судна забезпечує підвищення точності визначення глибини водойми за рахунок частотної фіксації відстаней, рівних цілому числу періодів довжини хвилі. H 30 kV 2 ФОРМУЛА ВИНАХОДУ 35 40 Спосіб дистанційного вимірювання глибини водойми з повітряного судна, що оснований на батиметричному двопроменевому методі вимірювань у видимому і інфрачервоному діапазонах, який відрізняється тим, що вимірювання виконуються в динаміці з розгойдуванням частоти випромінювання в межах відповідних діапазонів вимірювання рельєфу дна і глибини водойми, причому в кожному діапазоні змішуються у приймальному каналі відбиті і випромінювані імпульси відповідних частот, порівнюють отриману змішану частоту f , поділену навпіл, з частотою випромінювання, в момент співпадіння цих частот отримують подвоєну частоту f1 , надходження випромінюваних та відбитих імпульсів видимого діапазону та подвоєну частоту f2 2 UA 114428 C2 надходження випромінюваних та відбитих імпульсів інфрачервоного діапазону, а глибина водойми визначають за формулою: H kV 4 n1 n2 , f 1 f2 де 5 n1 - число періодів частоти 2f1 в каналі видимого діапазону; n 2 - число періодів частоти 2f2 в каналі інфрачервоного діапазону; n1 , n 2 - цілі непарні числа; k - коефіцієнт, який враховує зміну швидкості світла у водному середовищі; V - швидкість світла в атмосфері. 10 Комп’ютерна верстка Л. Бурлак Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01S 13/00, G01N 21/00
Мітки: повітряного, судна, водойми, глибини, вимірювання, спосіб, дистанційного
Код посилання
<a href="https://ua.patents.su/5-114428-sposib-distancijjnogo-vimiryuvannya-glibini-vodojjmi-z-povitryanogo-sudna.html" target="_blank" rel="follow" title="База патентів України">Спосіб дистанційного вимірювання глибини водойми з повітряного судна</a>
Застосування способу дистанційного контролю глибини водойми з використанням багатоканального доступу до полів сейшового походження для здійснення багатоканального зв’язку
Номер патенту: 111243
Опубліковано: 10.11.2016
Автори: Анахов Степан Павлович, Анахова Ольга Володимирівна, Анахов Павло Володимирович
МПК: H04J 99/00
Мітки: зв'язку, дистанційного, здійснення, використанням, походження, застосування, сейшового, водойми, багатоканального, доступу, полів, контролю, глибини, способу
Формула / Реферат:
Застосування способу дистанційного контролю глибини водойми з використанням багатоканального доступу до полів сейшового походження для здійснення багатоканального зв'язку.
Спосіб дистанційного визначення характеристик середовища відкритої водойми
Номер патенту: 96637
Опубліковано: 25.11.2011
Автор: Запевалов Олександр Сергійович
МПК: G01V 8/00, G01J 3/44, G01S 17/00
Мітки: відкритої, спосіб, водойми, дистанційного, середовища, характеристик, визначення
Формула / Реферат:
Спосіб дистанційного визначення характеристик середовища відкритої водойми, що полягає в тому, що поверхню відкритої водойми безперервно опромінюють лазером в надир, реєструють відблиски дзеркального відображення від поверхні відкритої водойми, вимірюють спектр комбінаційного розсіяння з водної товщі відкритої водойми і по ньому визначають характеристики середовища відкритої водойми, який відрізняється тим, що в момент реєстрації відблиску...
Комплексний автоматичний екстраполятор з функціями вимірювання градієнта вертикальної швидкості повітряного судна та крутизни схилу гір на скануючому радіовисотомірі

Номер патенту: 51343
Опубліковано: 12.07.2010
Автори: Тимошенко Тетяна Михайлівна, Хохлов Євген Михайлович, Пономарьова Анна Юріївна, Скрипець Андрій Васильович, Грищенко Юрій Віталійович
МПК: G08G 5/00, G01S 13/93
Мітки: градієнта, екстраполятор, автоматичний, крутизни, повітряного, швидкості, гир, радіовисотомірі, функціями, вимірювання, комплексний, вертикальної, судна, схилу, скануючому
Формула / Реферат:
Комплексний автоматичний екстраполятор з функціями вимірювання градієнта вертикальної швидкості повітряних суден та крутизни схилу гір на скануючому радіовисотомірі, що містить канал вертикальної екстраполяції, який відрізняється тим, що в нього введений канал горизонтальної екстраполяції.
Спосіб дистанційного визначення характеристик середовища відкритої водойми
Номер патенту: 84956
Опубліковано: 10.12.2008
Автор: Запевалов Олександр Сергійович
МПК: G01S 17/00, G01J 3/44, G01V 8/00
Мітки: характеристик, спосіб, середовища, визначення, відкритої, водойми, дистанційного
Формула / Реферат:
Спосіб дистанційного визначення характеристик середовища відкритої водойми, який полягає в тому, що здійснюють зондування середовища в надир раманівським лазером і одержують спектр комбінаційного розсіювання, за яким визначають характеристики середовища, який відрізняється тим, що додатково безупинно опромінюють у надир поверхню водойми лідаром зі суміщеними випромінювачем і фотоприймачем і реєструють відблиски дзеркального відбиття, при...
Спосіб вимірювання відстаней у водному середовищі
Номер патенту: 27648
Опубліковано: 12.11.2007
Автори: Боровий Валентин Олександрович, Мамонтова Людмила Степанівна, Куреньов Юрій Петрович, Бурачек Всеволод Германович
МПК: G01S 13/00
Мітки: вимірювання, спосіб, водному, відстаней, середовищі
Формула / Реферат:
Спосіб вимірювання відстаней у водному середовищі, який заснований на застосуванні методу імпульсної гідролокації, який відрізняється тим, що частоту імпульсів, які випромінюються, змінюють таким чином, щоб результуюча частота прийнятих імпульсів, які складаються з відбитих від підводного об'єкта та випромінюваних, була подвоєною відносно частоти випромінюваних імпульсів; при цьому результуючу частоту ділять навпіл і порівнюють одержану...
Попередній патент: Спосіб електрохімічної обробки нанорозмірних об’єктів із бактерицидних металів у біологічних середовищах
Наступний патент: Багажна полиця
Випадковий патент: Крильчатка для вентиляційних каналів