Суднова система зважування контейнерів
Номер патенту: 117146
Опубліковано: 12.06.2017
Автори: Дрозд Олена Володимірівна, Сандлер Альберт Кирилович
Формула / Реферат
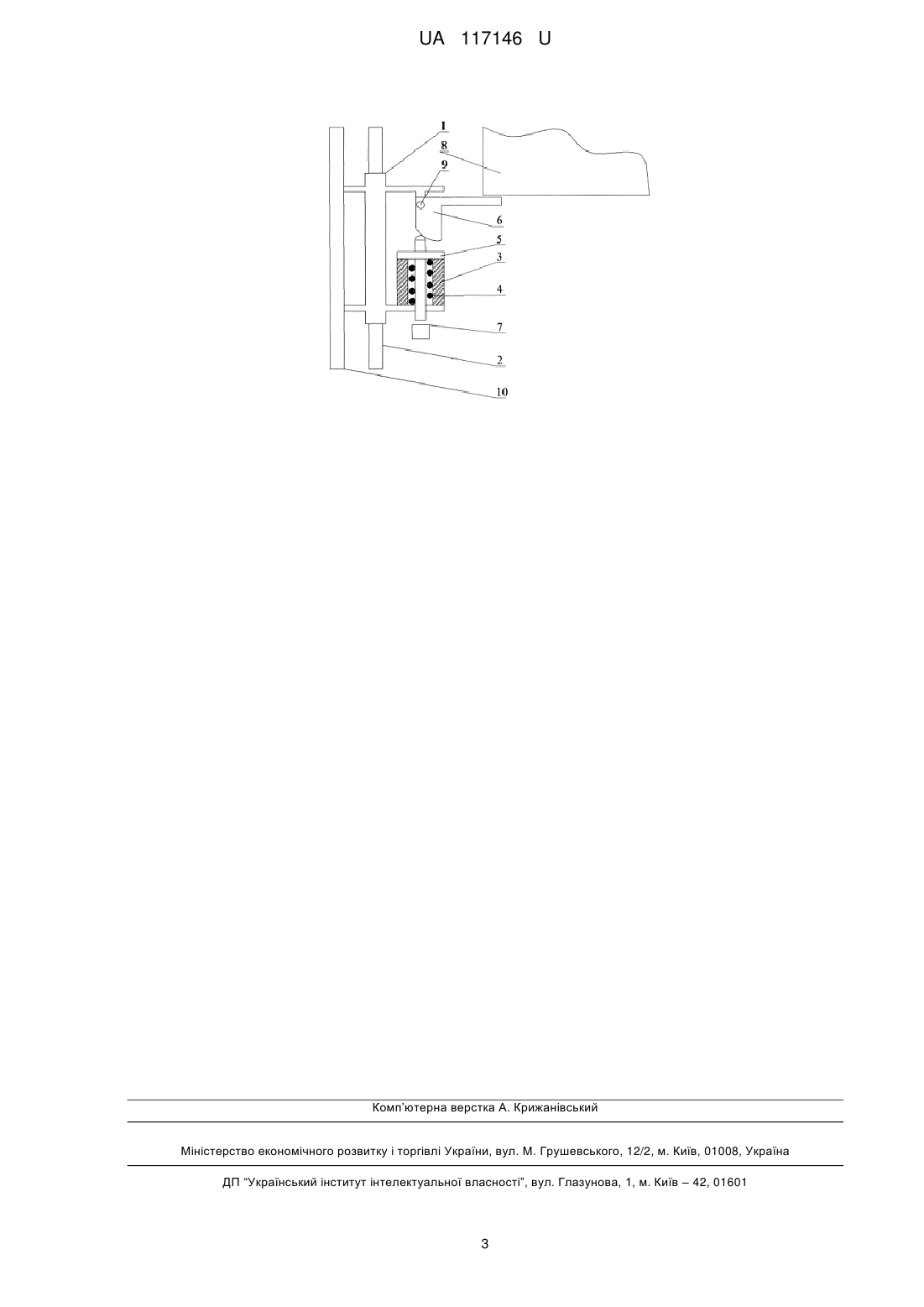
Суднова система зважування контейнерів, що складається з основи та чутливого елемента, яка відрізняється тим, що основа є рухомою та приводиться до руху по напрямним уздовж висоти контейнерного ряду лінійним електродвигуном, до чутливого елемента передається дія ваги контейнера за допомогою балки зі зворотною пружиною та ексцентриком, що тисне на шток, який взаємодіє з чутливим елементом з оксинітриду алюмінію, з'єднаним з волоконними світловодами, ваговою калібровочною пружиною та кінцевим вмикачем, який керує лінійним електродвигуном.
Текст
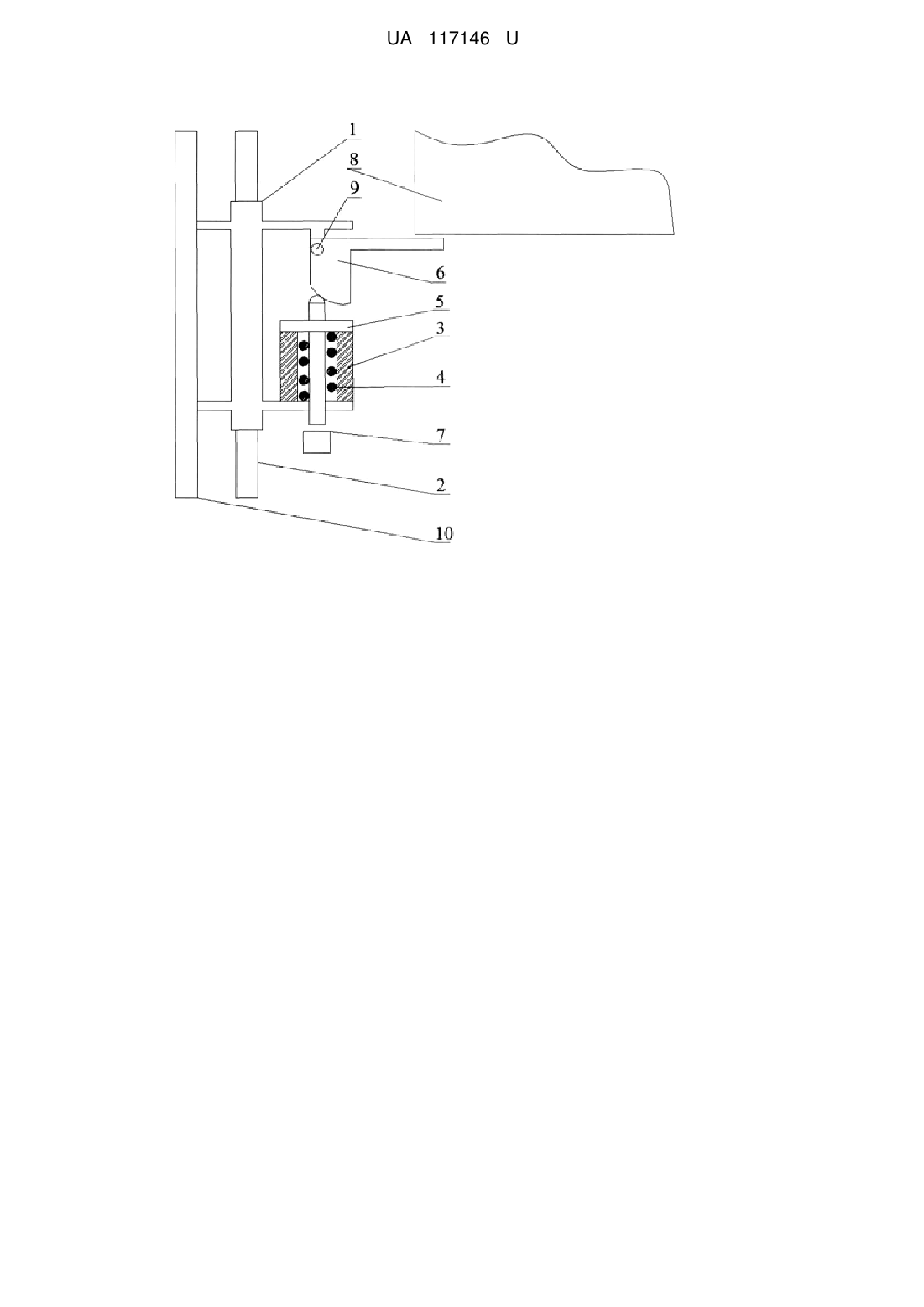
Реферат: Суднова система зважування контейнерів складається з основи та чутливого елемента. Основа є рухомою та приводиться до руху по напрямним уздовж висоти контейнерного ряду лінійним електродвигуном, до чутливого елемента передається дія ваги контейнера за допомогою балки зі зворотною пружиною та ексцентриком, що тисне на шток, який взаємодіє з чутливим елементом з оксинітриду алюмінію, з'єднаним з волоконними світловодами, ваговою калібровочною пружиною та кінцевим вмикачем, який керує лінійним електродвигуном. UA 117146 U (54) СУДНОВА СИСТЕМА ЗВАЖУВАННЯ КОНТЕЙНЕРІВ UA 117146 U UA 117146 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до систем зважування контейнерів. Область застосування вагоконтрольні системи морських контейнеровозів [1, 2, 3]. Відома система зважування контейнерів складається з вагової платформи та динамометричного чутливого елемента між платформою та вантажним гаком [4]. Недоліки пристрою, які обумовлені застосуванням вагової платформи та динамометричного чутливого елемента: - неможливість урахування при зважуванні дійсного центра ваги контейнера з вантажем; - необхідність наявності додаткового каналу передачі інформації "ваги-судно"; - залежність достовірності виміру від кліматологічних умов навколишнього середовища. Найближчим аналогом до корисної моделі є система зважування контейнерів, яка складається з основи, плити фундаментної, чутливого елемента з кріпленням та вагової платформи [5]. Недоліки пристрою, які обумовлені застосуванням вагової платформи: - необхідність додаткової перевантажувальної операції "берег-ваги-судно"; - необхідність наявності додаткового каналу передачі інформації "ваги-судно"; - залежність достовірності виміру від кліматологічних умов навколишнього середовища. Задачею корисної моделі є створення системи зважування контейнерів, у якій присутня можливість урахування при зважуванні дійсного центра ваги контейнера з вантажем, відсутні додаткові інформаційні канали та перевантажувальні операції при зважуванні, відсутня залежність від кліматологічних чинників та одночасно збережені високий рівень чутливості та точності, а також простота та надійність схемотехнічних рішень систем відомих типів. Поставлена задача вирішується тим, що у судновій системі зважування контейнерів, що складається з основи та чутливого елемента, згідно з корисною моделлю, основа є рухомою та приводиться до руху по напрямним уздовж висоти контейнерного ряду лінійним електродвигуном, до чутливого елемента передається дія ваги контейнера за допомогою балки зі зворотною пружиною та ексцентриком, що тисне на шток, який взаємодіє з чутливим елементом з оксинітриду алюмінію, з'єднаним з волоконними світловодами, ваговою калібровочною пружиною та кінцевим вмикачем, який керує лінійним електродвигуном. Технічний результат досягається завдяки тому, що комбінація оптико-механічних елементів забезпечує: - здійснення вагового контролю контейнерів безпосередньо під час вантажних операцій; - врахування й компенсацію впливу гідрометеорологічних чинників, що впливають на точність вагоконтрольних операцій; - постійну присутність вагоконтрольного комплексу на борту судна; - зниження витрат та часу на вагоконтрольні операції. Суть корисної моделі пояснюється кресленням, де зображено система зважування контейнерів, що складається з чотирьох комплектів, змонтованих по кутах кожного контейнерного ряду. Кожен з комплектів являє собою основу 1, яка рухається уздовж напрямної 2. На основі закріплені чутливий елемент з оксинітриду алюмінію з волоконними світловодами 3, калібровочна пружина 4, балка з ексцентриком 6, кінцевий вмикач 7 та зворотна пружина 9. Шток 5 знаходиться у механічному зв'язку з чутливим елементом, калібровочною пружиною та балкою з ексцентриком та зворотною пружиною. Рух основи уздовж напрямної забезпечує лінійний електродвигун 10. При опусканні по ряду контейнера 8, він приводить до руху балку з ексцентриком, який тисне на шток. Шток тисне на чутливий елемент та калібровочну пружину. Чутливий елемент з оксинітриду алюмінію деформується та в ньому відбувається порушення умов повного внутрішнього відбивання світла, що надходить з волоконних світловодів [6]. Величина зниження інтенсивності світлового випромінювання внаслідок деформації буде пропорційна вазі контейнера. Отриманий сигнал надходить безпосередньо до суднової інформаційновимірювальної системи. Після проходження контейнера зони контакту з балкою, зворотна пружина повертає її в початкове положення, а шток у крайньому нижньому положенні вмикає кінцевий вмикач. З кінцевого вмикача надходить сигнал до лінійного електродвигуна. Останній переміщає основу до позиції, що відповідає наступному шару контейнерів у ряді. На кресленні зображена суднова система зважування контейнерів: 1 - основа; 2 - напрямна; 3 - чутливий елемент з оксинітриду алюмінію з волоконними світловодами; 4 - калібровочна пружина; 5 - шток; 6 - балка з ексцентриком; 7 - кінцевий вмикач; 8 - контейнер; 9 - зворотна пружина; 10 - лінійний електродвигун. Для здійснення корисної моделі застосовано комбінацію оптікомеханічних елементів. 1 UA 117146 U 5 10 15 20 25 30 35 У статичному режимі (перед початком вантажної операції) на опорі встановлюється відповідна калібруюча пружина, яка відповідає вазі та типу контейнерів, які будуть завантажуватися у відповідний ряд. Також виконується калібрування оптичної складової системи у відсутності навантаження. У динамічному режимі (режим вантажної операції) відбувається При опусканні по ряду контейнера 8, він приводить до руху балку з ексцентриком, який тисне на шток. Шток тисне на чутливий елемент та калібровочну пружину. Чутливий елемент з оксинітриду алюмінію деформується та в ньому відбувається порушення умов повного внутрішнього відбивання світла, що надходить з волоконних світловодів [6]. Величина зниження інтенсивності світлового випромінювання внаслідок деформації буде пропорційна вазі контейнера. Отриманий сигнал надходить безпосередньо до суднової інформаційно-вимірювальної системи. Після проходження контейнера зони контакту з балкою, зворотна пружина повертає її в початкове положення, а шток у крайньому нижньому положенні вмикає кінцевий вмикач. З кінцевого вмикача надходить сигнал до лінійного електродвигуна. Останній переміщає основу до позиції, що відповідає наступному шару контейнерів у ряді. Для визначення точної ваги контейнера, з урахуванням дійсного центру ваги вантажу, суднова інформаційно-вимірювальна система опрацьовує сигналу з усіх чотирьох чутливих елементів комплекту. Таким чином, відбувається повний цикл системи вимірювання ваги контейнера. Джерела інформації: 1. Весы крановые. [Электронный ресурс]. Режим доступа: http://www.torgtehnika.com.ua/vesikranovie/blog.html 2. Нікольський, В.В., Нікольський, М.В., Накул, Ю.А. Система підтримки прийняття рішення по навантаженню великотоннажного контейнеровоза. // Наукові праці: Науково-методичний журнал. - Миколаїв: Вид-во ЧНУ ім. Петра Могили. - 2016. - Вип. 271. - Т. 283. Комп'ютерні технології. - С. 60-63. 3. Шмекер, К. Взвешивание контейнеров по требованиям ІМО и его возможные последствия / К. Шмекер // Порты Украины, № 07 (139). - 2014 [Электронный ресурс]. - Режим доступа: http://portsukraine.com /node/ 3776. 4. Крановые весы - характеристики, устройство и применение - Режим доступа: http://promplace.ru/kranovie-vesi-harakteristiki-ustrojstvo-i-primenenie-466.htm. 5. Контейнерные весы. [Электронный ресурс]. Режим доступа: http://www.metra.ru/catalogue/bolshegruznye-vesy/konteinernye-vesy.html. 6. AION прозрачный алюминий - Transparent Aluminum Oxynitride. [Электронный ресурс]. Режим доступа: http://www.sciencedebate2008.com/ unusual-aluminum/ ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 Суднова система зважування контейнерів, що складається з основи та чутливого елемента, яка відрізняється тим, що основа є рухомою та приводиться до руху по напрямним уздовж висоти контейнерного ряду лінійним електродвигуном, до чутливого елемента передається дія ваги контейнера за допомогою балки зі зворотною пружиною та ексцентриком, що тисне на шток, який взаємодіє з чутливим елементом з оксинітриду алюмінію, з'єднаним з волоконними світловодами, ваговою калібровочною пружиною та кінцевим вмикачем, який керує лінійним електродвигуном. 2 UA 117146 U Комп’ютерна верстка А. Крижанівський Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01G 15/00, G01G 17/00
Мітки: система, суднова, контейнерів, зважування
Код посилання
<a href="https://ua.patents.su/5-117146-sudnova-sistema-zvazhuvannya-kontejjneriv.html" target="_blank" rel="follow" title="База патентів України">Суднова система зважування контейнерів</a>
Система визначення положення контейнерів на контейнерній площадці
Номер патенту: 62709
Опубліковано: 12.09.2011
Автор: Морозова Галина Вікторівна
МПК: B65G 63/00, B65G 1/00
Мітки: визначення, площадці, система, контейнерів, положення, контейнерний
Формула / Реферат:
1. Система визначення положення контейнерів на контейнерній площадці, що містить комп'ютер з можливістю відображення на дисплеї плана контейнерної площадки та розташування на ній контейнерів з кодами, електронну мережу і відеокамери, яка відрізняється тим, що додатково введено відеосервер, відеокамери підключені до входу відеосервера, а вихід відеосервера з обробленим цифровим сигналом підключений в мережевий простір.2. Система за...
Система поосьового зважування на платформних вагах
Номер патенту: 106013
Опубліковано: 10.07.2014
Автори: Крижановський Юрій Антонович, Бабак Олег Володимирович, Татарінов Олексій Едуардович, Суровцев Ігор Вікторович
МПК: G01G 19/02
Мітки: платформних, вагах, поосьового, система, зважування
Формула / Реферат:
Система поосьового зважування на платформних автомобільних вагах, яка містить вантажну платформу, датчики сили, систему обробки та відображення інформації, а також систему селекції, керування і вимірювання, що забезпечені вантажною платформою, встановленою на датчики сили, виконані у вигляді датчиків розтягнення-стиснення, які згруповані у дві лінії за рухом транспорту, виходи датчиків сили під'єднані до входу цифрового відлікового пристрою,...
Пристрій для розрядки робочих контейнерів
Номер патенту: 38792
Опубліковано: 15.05.2001
Автори: Потапенко Євген Максимович, Фролов Віктор Васильович, Вірнік Фелікс Вольфович, Кравець Володимир Олексійович
МПК: G21F 5/00
Мітки: контейнерів, розрядки, пристрій, робочих
Формула / Реферат:
(21) 2000105641 Дата прийняття(54)(57) рішення 21 березня 2001 р.Пристрій для розрядки робочих контейнерів, що містить захисний корпус з наскрізним циліндричним каналом...
Система зважування залізничних вагонів і потягів під час руху та спосіб ідентифікації вагонів і потягів під час руху в процесі зважування
Номер патенту: 57536
Опубліковано: 15.05.2006
Автори: Яковлев Віталій Васильович, Немчин Олександр Федорович, Григоров Євген Владиславович, Паценкер Борис Львович
МПК: G01G 19/04
Мітки: процесі, вагонів, ідентифікації, потягів, руху, зважування, спосіб, система, залізничних
Формула / Реферат:
Спосіб виготовлення плівок халькогенідів металів, наприклад сульфіду цинку на підкладці полягає в тому, що всередині проточного реактора розміщують на вході кювету з хелатною металоорганічною сполукою, а на виході - підкладку. Пропускають через проточний реактор газ-носій. Нагрівають кювету до температури випаровування хелатної металоорганічної сполуки, а її пари за допомогою газу-носія транспортують до підкладки, яку перед цим додатково...
Система зважування залізничних вагонів і потягів у русі та спосіб ідентифікації вагонів і потягів у русі в процесі зважування
Номер патенту: 57536
Опубліковано: 16.06.2003
Автори: Паценкер Борис Львович, Яковлев Віталій Васильович, Григоров Євген Владиславович, Немчин Олександр Федорович
МПК: G01G 19/04
Мітки: ідентифікації, вагонів, залізничних, система, зважування, процесі, спосіб, русі, потягів
Формула / Реферат:
Спосіб виготовлення плівок халькогенідів металів, наприклад сульфіду цинку на підкладці полягає в тому, що всередині проточного реактора розміщують на вході кювету з хелатною металоорганічною сполукою, а на виході - підкладку. Пропускають через проточний реактор газ-носій. Нагрівають кювету до температури випаровування хелатної металоорганічної сполуки, а її пари за допомогою газу-носія транспортують до підкладки, яку перед цим додатково...