Евольвентна зубчаста передача попова о.п. з точковою системою зачеплення поздовжньо модифікованих зубів
Формула / Реферат
Евольвентна зубчаста передача з точковою системою зачеплення поздовжньо модифікованих зубів, що містить ведуче та ведене зубчасті колеса з розташованими на них евольвентними зубами, які взаємодіють один з одним по лінії контакту, яка відрізняється тим, що прямолінійні твірні бічних поверхонь зубів ведучого зубчастого колеса замінені криволінійними твірними з радіусом кривизни ![]() , внаслідок чого відбувається точкове зачеплення зубів, а евольвентні ділянки зубів ведучого та веденого зубчастих коліс на відстані
, внаслідок чого відбувається точкове зачеплення зубів, а евольвентні ділянки зубів ведучого та веденого зубчастих коліс на відстані ![]() від вершин зубів характеризуються дугами кіл з радіусами
від вершин зубів характеризуються дугами кіл з радіусами ![]() і
і ![]() , плавно спряженими з евольвентними кривими, при цьому товщини вершин зубів з кожної сторони зменшені на величину
, плавно спряженими з евольвентними кривими, при цьому товщини вершин зубів з кожної сторони зменшені на величину ![]() мм, крім того, радіуси
мм, крім того, радіуси ![]() і
і ![]() визначаються із співвідношення:
визначаються із співвідношення:
![]() ,
,
де ![]() ,
, ![]() - радіуси кривизни евольвентних кривих в точках спряження з дугами кіл; bW - довжина зубів;
- радіуси кривизни евольвентних кривих в точках спряження з дугами кіл; bW - довжина зубів; ![]() - параметр криволінійності зубів на торцевих ділянках; m - модуль зачеплення; ra1, ra2 - радіуси вершин зубів коліс; rb1, rb2 - радіуси основних кіл коліс;
- параметр криволінійності зубів на торцевих ділянках; m - модуль зачеплення; ra1, ra2 - радіуси вершин зубів коліс; rb1, rb2 - радіуси основних кіл коліс; ![]() - кут зачеплення.
- кут зачеплення.
Текст
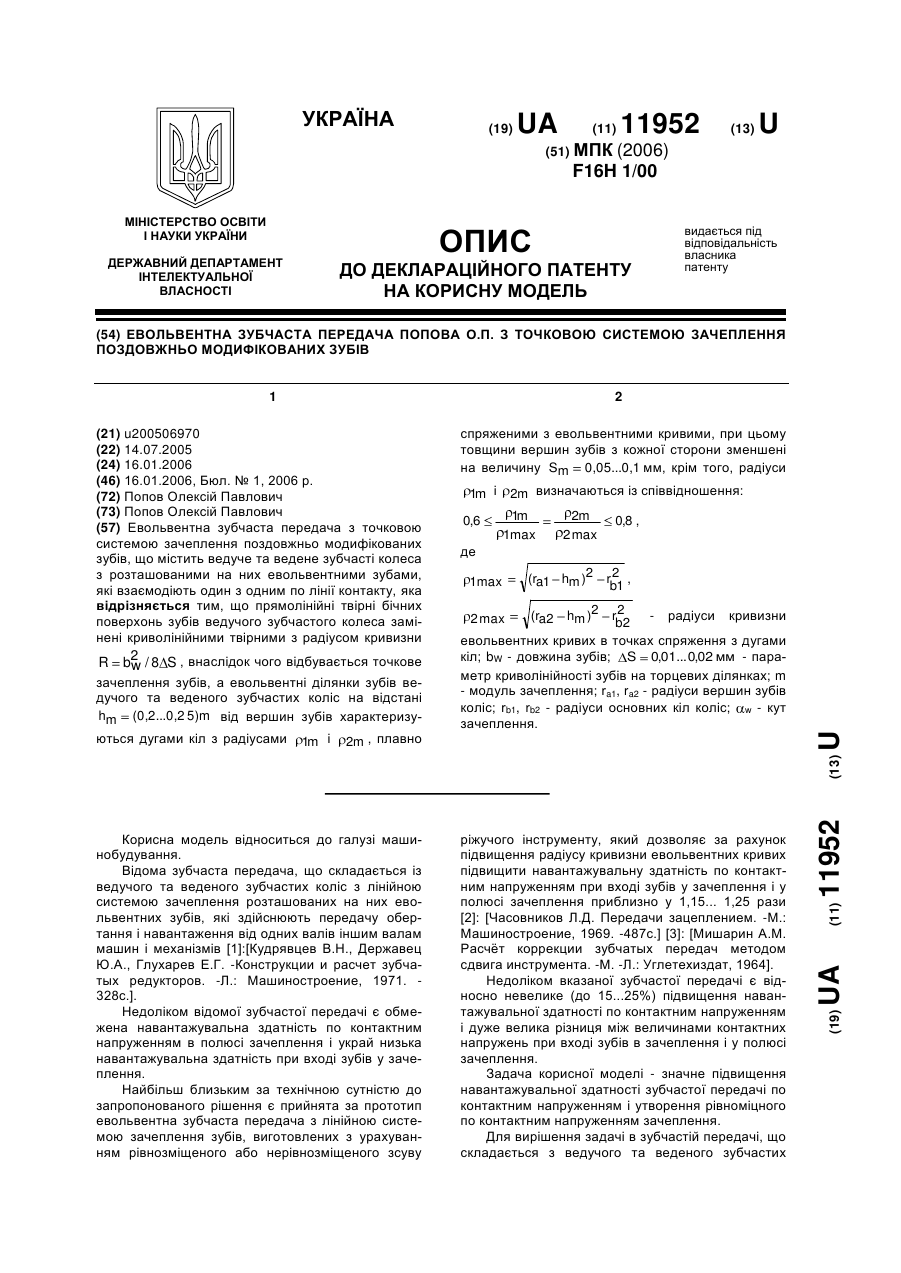
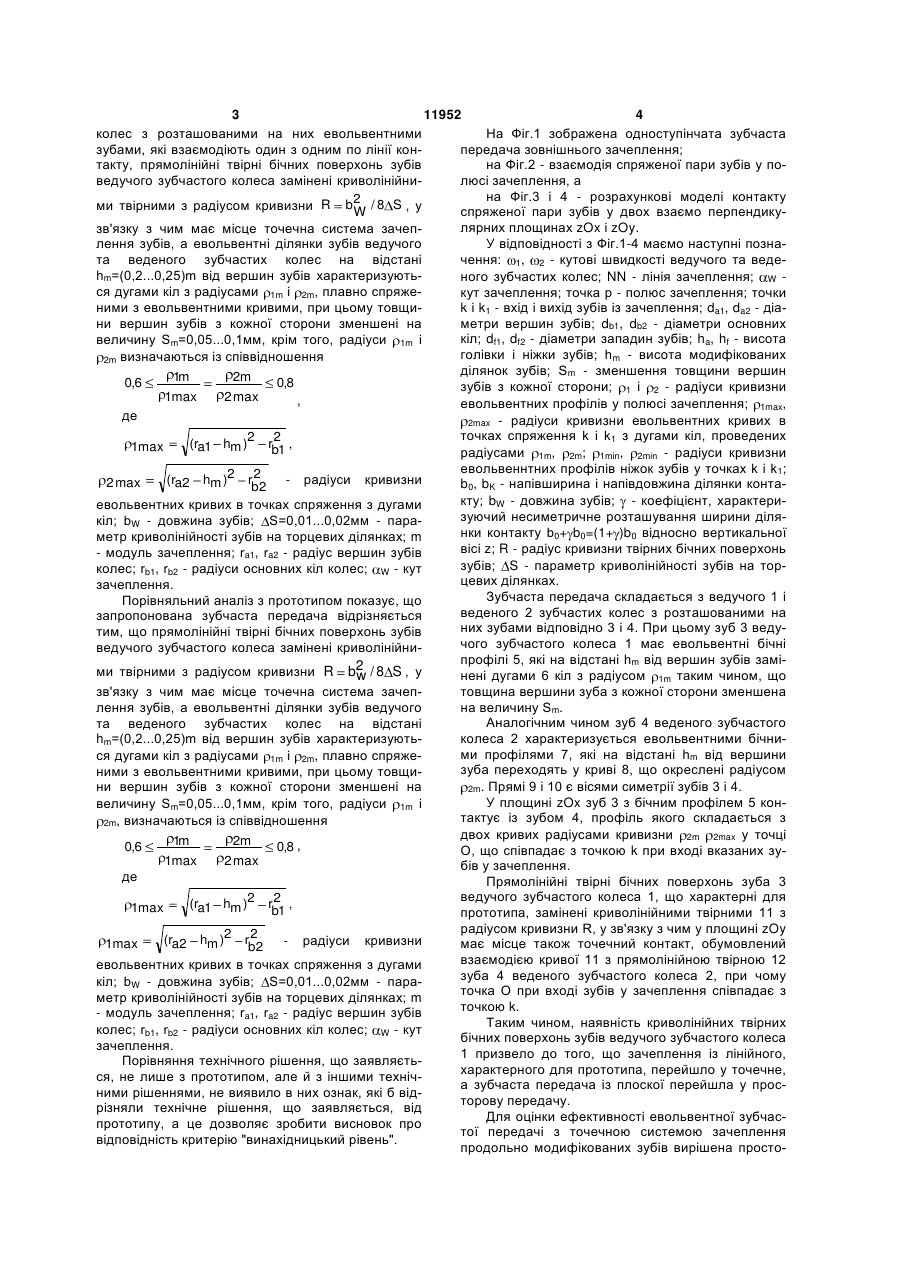
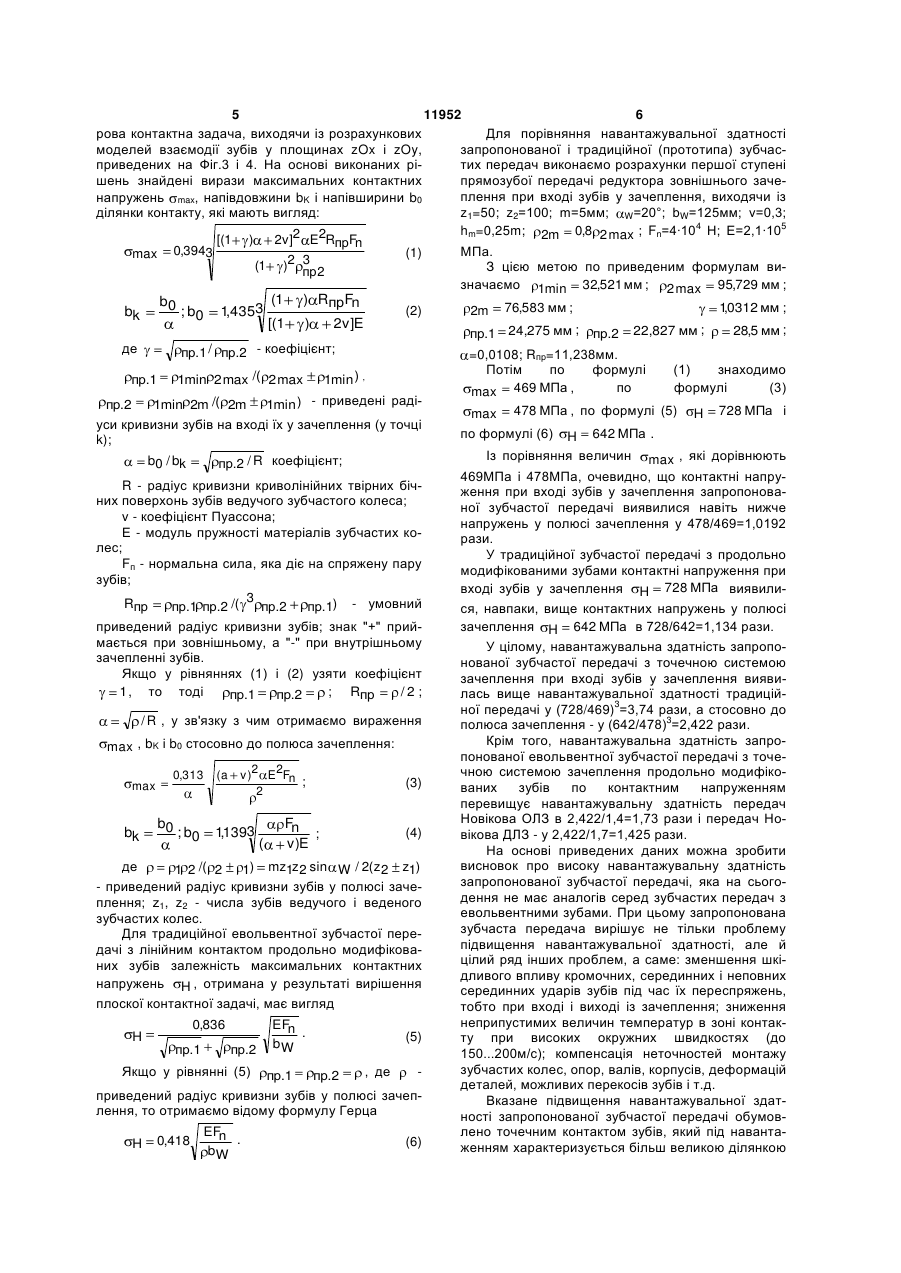
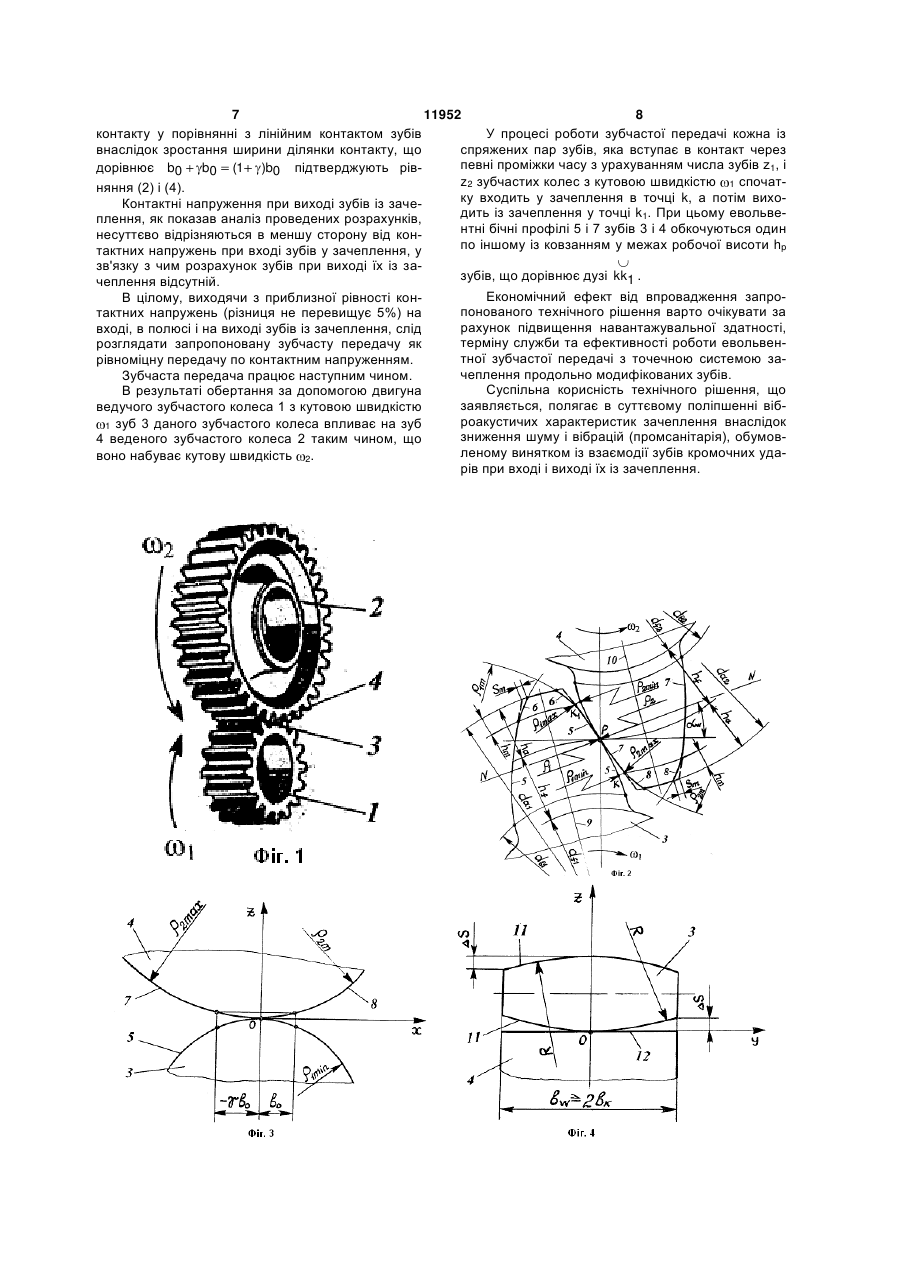
Евольвентна зубчаста передача з точковою системою зачеплення поздовжньо модифікованих зубів, що містить ведуче та ведене зубчасті колеса з розташованими на них евольвентними зубами, які взаємодіють один з одним по лінії контакту, яка відрізняється тим, що прямолінійні твірні бічних поверхонь зубів ведучого зубчастого колеса замінені криволінійними твірними з радіусом кривизни R b2 / 8 S , внаслідок чого відбувається точкове w зачеплення зубів, а евольвентні ділянки зубів ведучого та веденого зубчастих коліс на відстані hm (0,2...0,2 5)m від вершин зубів характеризу 3 11952 4 колес з розташованими на них евольвентними На Фіг.1 зображена одноступінчата зубчаста зубами, які взаємодіють один з одним по лінії конпередача зовнішнього зачеплення; такту, прямолінійні твірні бічних поверхонь зубів на Фіг.2 - взаємодія спряженої пари зубів у поведучого зубчастого колеса замінені криволінійнилюсі зачеплення, а на Фіг.3 і 4 - розрахункові моделі контакту ми твірними з радіусом кривизни R b2 / 8 S , у спряженої пари зубів у двох взаємо перпендикуW лярних площинах zOx і zOy. зв'язку з чим має місце точечна система зачепУ відповідності з Фіг.1-4 маємо наступні позналення зубів, а евольвентні ділянки зубів ведучого та веденого зубчастих колес на відстані чення: 1, 2 - кутові швидкості ведучого та ведеhm=(0,2...0,25)m від вершин зубів характеризуютьного зубчастих колес; NN - лінія зачеплення; W ся дугами кіл з радіусами 1m і 2m, плавно спряжекут зачеплення; точка р - полюс зачеплення; точки ними з евольвентними кривими, при цьому товщиk і k1 - вхід і вихід зубів із зачеплення; da1, da2 - діани вершин зубів з кожної сторони зменшені на метри вершин зубів; db1, db2 - діаметри основних кіл; df1, df2 - діаметри западин зубів; ha, hf - висота величину Sm=0,05...0,1мм, крім того, радіуси 1m і голівки і ніжки зубів; hm - висота модифікованих визначаються із співвідношення 2m ділянок зубів; Sm - зменшення товщини вершин 1m 2m 0,6 0,8 зубів з кожної сторони; 1 і 2 - радіуси кривизни 1max 2 max , евольвентних профілів у полюсі зачеплення; 1max, де 2max - радіуси кривизни евольвентних кривих в точках спряження k і k1 з дугами кіл, проведених 2 r2 , (ra1 hm ) 1max b1 радіусами 1m, 2m; 1min, 2min - радіуси кривизни евольвеннтних профілів ніжок зубів у точках k і k1; (ra2 hm )2 r 2 - радіуси кривизни 2 max b0, bK - напівширина і напівдовжина ділянки контаb2 кту; bW - довжина зубів; - коефіцієнт, характериевольвентних кривих в точках спряження з дугами зуючий несиметричне розташування ширини ділякіл; bW - довжина зубів; S=0,01...0,02мм - паранки контакту b0+ b0=(1+ )b0 відносно вертикальної метр криволінійності зубів на торцевих ділянках; m вісі z; R - радіус кривизни твірних бічних поверхонь - модуль зачеплення; ra1, ra2 - радіус вершин зубів зубів; S - параметр криволінійності зубів на торколес; rb1, rb2 - радіуси основних кіл колес; W - кут цевих ділянках. зачеплення. Зубчаста передача складається з ведучого 1 і Порівняльний аналіз з прототипом показує, що веденого 2 зубчастих колес з розташованими на запропонована зубчаста передача відрізняється них зубами відповідно 3 і 4. При цьому зуб 3 ведутим, що прямолінійні твірні бічних поверхонь зубів чого зубчастого колеса 1 має евольвентні бічні ведучого зубчастого колеса замінені криволінійнипрофілі 5, які на відстані hm від вершин зубів замі2 /8 S , у ми твірними з радіусом кривизни R bw нені дугами 6 кіл з радіусом 1m таким чином, що товщина вершини зуба з кожної сторони зменшена зв'язку з чим має місце точечна система зачепна величину Sm. лення зубів, а евольвентні ділянки зубів ведучого Аналогічним чином зуб 4 веденого зубчастого та веденого зубчастих колес на відстані колеса 2 характеризується евольвентними бічниhm=(0,2...0,25)m від вершин зубів характеризуютьми профілями 7, які на відстані hm від вершини ся дугами кіл з радіусами 1m і 2m, плавно спряжезуба переходять у криві 8, що окреслені радіусом ними з евольвентними кривими, при цьому товщини вершин зубів з кожної сторони зменшені на 2m. Прямі 9 і 10 є вісями симетрії зубів 3 і 4. У площині zOx зуб 3 з бічним профілем 5 конвеличину Sm=0,05...0,1мм, крім того, радіуси 1m і тактує із зубом 4, профіль якого складається з 2m, визначаються із співвідношення двох кривих радіусами кривизни 2m 2max у точці 1m 2m 0,6 0,8 , О, що співпадає з точкою k при вході вказаних зу1max 2 max бів у зачеплення. де Прямолінійні твірні бічних поверхонь зуба 3 ведучого зубчастого колеса 1, що характерні для 2 r2 , (ra1 hm ) 1max b1 прототипа, замінені криволінійними твірними 11 з радіусом кривизни R, у зв'язку з чим у площині zOy (ra2 hm )2 r 2 1max має місце також точечний контакт, обумовлений b2 - радіуси кривизни взаємодією кривої 11 з прямолінійною твірною 12 евольвентних кривих в точках спряження з дугами зуба 4 веденого зубчастого колеса 2, при чому кіл; bW - довжина зубів; S=0,01...0,02мм - параточка О при вході зубів у зачеплення співпадає з метр криволінійності зубів на торцевих ділянках; m точкою k. - модуль зачеплення; ra1, ra2 - радіус вершин зубів Таким чином, наявність криволінійних твірних колес; rb1, rb2 - радіуси основних кіл колес; W - кут бічних поверхонь зубів ведучого зубчастого колеса зачеплення. 1 призвело до того, що зачеплення із лінійного, Порівняння технічного рішення, що заявляєтьхарактерного для прототипа, перейшло у точечне, ся, не лише з прототипом, але й з іншими техніча зубчаста передача із плоскої перейшла у просними рішеннями, не виявило в них ознак, які б відторову передачу. різняли технічне рішення, що заявляється, від Для оцінки ефективності евольвентної зубчаспрототипу, а це дозволяє зробити висновок про тої передачі з точечною системою зачеплення відповідність критерію "винахідницький рівень". продольно модифікованих зубів вирішена просто 5 11952 6 рова контактна задача, виходячи із розрахункових Для порівняння навантажувальної здатності моделей взаємодії зубів у площинах zOx і zOy, запропонованої і традиційної (прототипа) зубчасприведених на Фіг.3 і 4. На основі виконаних рітих передач виконаємо розрахунки першої ступені шень знайдені вирази максимальних контактних прямозубої передачі редуктора зовнішнього зачеплення при вході зубів у зачеплення, виходячи із напружень max, напівдовжини bK і напівширини b0 ділянки контакту, які мають вигляд: z1=50; z2=100; m=5мм; W=20°; bW=125мм; v=0,3; hm=0,25m; 2m 0,8 2 max ; Fn=4·104 H; E=2,1·105 2 E2R F [(1 ) 2v ] пр n МПа. (1) max 0,3943 (1 )2 3 З цією метою по приведеним формулам випр 2 значаємо 1min 32,521 мм ; 2 max 95,729 мм ; b0 ; b0 bk де 1 4353 , (1 [(1 ) RпрFn ) 2v ]E (2) пр.1 1min ) , пр.2 1min 2m /( 2m 1min ) - приведені радіуси кривизни зубів на вході їх у зачеплення (у точці k); пр.2 / R коефіцієнт; b0 / bk R - радіус кривизни криволінійних твірних бічних поверхонь зубів ведучого зубчастого колеса; v - коефіцієнт Пуассона; Е - модуль пружності матеріалів зубчастих колес; Fп - нормальна сила, яка діє на спряжену пару зубів; 3 Rпр пр.1 пр.2 /( пр.2 пр.1) - умовний приведений радіус кривизни зубів; знак "+" приймається при зовнішньому, а "-" при внутрішньому зачепленні зубів. Якщо у рівняннях (1) і (2) узяти коефіцієнт ; Rпр /2 ; 1 , то тоді пр.1 пр.2 / R , у зв'язку з чим отримаємо вираження max , bK і b0 стосовно до полюса зачеплення: max bk 0,313 (a v )2 E2Fn ; 2 b0 ; b0 11393 , ( Fn ; v )E (3) (4) де 1 2 /( 2 1) mz1z2 sin W / 2( z2 z1) - приведений радіус кривизни зубів у полюсі зачеплення; z1, z2 - числа зубів ведучого і веденого зубчастих колес. Для традиційної евольвентної зубчастої передачі з лінійним контактом продольно модифікованих зубів залежність максимальних контактних напружень H , отримана у результаті вирішення плоскої контактної задачі, має вигляд H 0,836 пр.1 пр.2 EFn . bW (5) Якщо у рівнянні (5) пр.1 , де пр.2 приведений радіус кривизни зубів у полюсі зачеплення, то отримаємо відому формулу Герца H 0,418 EFn . bW 76,583 мм ; пр.1 24,275 мм ; пр.1 / пр.2 - коефіцієнт; 1min 2 max /( 2 max 2m (6) 10312 мм ; , пр.2 22,827 мм ; =0,0108; Rпр=11,238мм. Потім по формулі 469 МПа , по max 28,5 мм ; (1) знаходимо формулі (3) max 478 МПа , по формулі (5) по формулі (6) H 642 МПа . H 728 МПа і Із порівняння величин max , які дорівнюють 469МПа і 478МПа, очевидно, що контактні напруження при вході зубів у зачеплення запропонованої зубчастої передачі виявилися навіть нижче напружень у полюсі зачеплення у 478/469=1,0192 рази. У традиційної зубчастої передачі з продольно модифікованими зубами контактні напруження при вході зубів у зачеплення H 728 МПа виявилися, навпаки, вище контактних напружень у полюсі зачеплення H 642 МПа в 728/642=1,134 рази. У цілому, навантажувальна здатність запропонованої зубчастої передачі з точечною системою зачеплення при вході зубів у зачеплення виявилась вище навантажувальної здатності традиційної передачі у (728/469)3=3,74 рази, а стосовно до полюса зачеплення - у (642/478)3=2,422 рази. Крім того, навантажувальна здатність запропонованої евольвентної зубчастої передачі з точечною системою зачеплення продольно модифікованих зубів по контактним напруженням перевищує навантажувальну здатність передач Новікова ОЛЗ в 2,422/1,4=1,73 рази і передач Новікова ДЛЗ - у 2,422/1,7=1,425 рази. На основі приведених даних можна зробити висновок про високу навантажувальну здатність запропонованої зубчастої передачі, яка на сьогодення не має аналогів серед зубчастих передач з евольвентними зубами. При цьому запропонована зубчаста передача вирішує не тільки проблему підвищення навантажувальної здатності, але й цілий ряд інших проблем, а саме: зменшення шкідливого впливу кромочних, серединних і неповних серединних ударів зубів під час їх переспряжень, тобто при вході і виході із зачеплення; зниження неприпустимих величин температур в зоні контакту при високих окружних швидкостях (до 150...200м/с); компенсація неточностей монтажу зубчастих колес, опор, валів, корпусів, деформацій деталей, можливих перекосів зубів і т.д. Вказане підвищення навантажувальної здатності запропонованої зубчастої передачі обумовлено точечним контактом зубів, який під навантаженням характеризується більш великою ділянкою 7 11952 8 контакту у порівнянні з лінійним контактом зубів У процесі роботи зубчастої передачі кожна із внаслідок зростання ширини ділянки контакту, що спряжених пар зубів, яка вступає в контакт через певні проміжки часу з урахуванням числа зубів z1, і дорівнює b0 b0 (1 )b0 підтверджують рівz2 зубчастих колес з кутовою швидкістю 1 спочатняння (2) і (4). ку входить у зачеплення в точці k, а потім вихоКонтактні напруження при виході зубів із зачедить із зачеплення у точці k1. При цьому евольвеплення, як показав аналіз проведених розрахунків, нтні бічні профілі 5 і 7 зубів 3 і 4 обкочуються один несуттєво відрізняються в меншу сторону від конпо іншому із ковзанням у межах робочої висоти hp тактних напружень при вході зубів у зачеплення, у зв'язку з чим розрахунок зубів при виході їх із зачеплення відсутній. В цілому, виходячи з приблизної рівності контактних напружень (різниця не перевищує 5%) на вході, в полюсі і на виході зубів із зачеплення, слід розглядати запропоновану зубчасту передачу як рівноміцну передачу по контактним напруженням. Зубчаста передача працює наступним чином. В результаті обертання за допомогою двигуна ведучого зубчастого колеса 1 з кутовою швидкістю 1 зуб 3 даного зубчастого колеса впливає на зуб 4 веденого зубчастого колеса 2 таким чином, що воно набуває кутову швидкість 2. зубів, що дорівнює дузі kk1 . Економічний ефект від впровадження запропонованого технічного рішення варто очікувати за рахунок підвищення навантажувальної здатності, терміну служби та ефективності роботи евольвентної зубчастої передачі з точечною системою зачеплення продольно модифікованих зубів. Суспільна корисність технічного рішення, що заявляється, полягає в суттєвому поліпшенні віброакустичих характеристик зачеплення внаслідок зниження шуму і вібрацій (промсанітарія), обумовленому винятком із взаємодії зубів кромочних ударів при вході і виході їх із зачеплення. 9 Комп’ютерна верстка Л.Литвиненко 11952 Підписне 10 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюPopovs involute gearing with point system of coupling of teeth modified in long direction
Автори англійськоюPopov Oleksii Pavlovych
Назва патенту російськоюЭвольвентная зубчатая предача попова а.п. с точечной системой зацепления продольно модифицированных зубов
Автори російськоюПопов Алексей Павлович
МПК / Мітки
МПК: F16H 1/00
Мітки: поздовжньої, системою, попова, зубчаста, зачеплення, о.п, модифікованих, зубів, евольвентна, точковою, передача
Код посилання
<a href="https://ua.patents.su/5-11952-evolventna-zubchasta-peredacha-popova-op-z-tochkovoyu-sistemoyu-zacheplennya-pozdovzhno-modifikovanikh-zubiv.html" target="_blank" rel="follow" title="База патентів України">Евольвентна зубчаста передача попова о.п. з точковою системою зачеплення поздовжньо модифікованих зубів</a>
Зубчаста передача попова о.п. з точковою системою зачеплення евольвентних зубів
Номер патенту: 11441
Опубліковано: 15.12.2005
Автор: Попов Олексій Павлович
МПК: F16H 1/00
Мітки: евольвентних, зубчаста, зачеплення, о.п, попова, системою, зубів, передача, точковою
Формула / Реферат:
Зубчаста передача, яка складається з ведучого і веденого зубчастих коліс з розташованими на них евольвентними зубами, які взаємодіють одне з одним по лінії контакту, яка відрізняється тим, що в результаті заміни прямолінійних твірних бічних поверхонь зубів ведучого зубчастого колеса криволінійними твірними з радіусом кривизни R виконана точкова система зачеплення зубів, при цьому радіус R при перекосі зубів на кут Ψ і при відсутності...
Зубчасте зачеплення попова о.п. з поздовжньо модифікованими зубами
Номер патенту: 5641
Опубліковано: 15.03.2005
Автор: Попов Олексій Павлович
МПК: F16H 1/00
Мітки: зачеплення, поздовжньої, о.п, попова, модифікованими, зубами, зубчасте
Формула / Реферат:
Зубчасте зачеплення з поздовжньо модифікованими зубами, яке складається з ведучого і веденого зубчастих коліс з розташованими на них зубами, які містять евольвентні ніжки та неевольвентні головки, які знаходяться в зачепленні між собою, яке відрізняється тим, що бічні профілі ділянок зубів веденого зубчастого колеса, які прилеглі до їх вершин, у межах висоти виконані у...
Зубчаста передача попова о.п.
Номер патенту: 59839
Опубліковано: 15.09.2003
Автор: Попов Олексій Павлович
МПК: F16H 1/00
Мітки: попова, зубчаста, о.п, передача
Формула / Реферат:
Зубчаста передача, що містить ведуче та ведене зубчасті колеса з розташованими на них зубами, які знаходяться між собою в зачепленні, яка відрізняється тим, що будь-які точки бокових профілів зубів характеризуються сталими і рівними радіусами кривизни, що перевищують за значенням змінні радіуси кривизни бокових профілів евольвентних зубів, до того ж центри кривизни радіусів не збігаються один з одним і розташовані поза лінією зачеплення, за...
Зубчаста передача попова о.п. з модифікованими зубами
Номер патенту: 10475
Опубліковано: 15.11.2005
Автор: Попов Олексій Павлович
МПК: F16H 1/00
Мітки: о.п, зубами, передача, попова, модифікованими, зубчаста
Формула / Реферат:
Зубчаста передача, яка містить ведуче та ведене зубчасті колеса з розташованими на них неевольвентними зубами, які знаходяться між собою у зачепленні, яка відрізняється тим, що бічні профілі ділянок зубів з двох сторін ведучого та веденого зубчастих коліс, прилягаючі до їх вершин, в межах висоти виконані у вигляді прямих відрізків з урахуванням зменшення товщини вершин...
Енкаітна зубчаста передача попова о.п.
Номер патенту: 62233
Опубліковано: 15.12.2003
Автор: Попов Олексій Павлович
МПК: F16H 1/00
Мітки: о.п, зубчаста, енкаітна, передача, попова
Формула / Реферат:
Енкаітна зубчаста передача, яка містить ведуче та ведене зубчасті колеса з розташованими на них зубами, які знаходяться між собою в зачепленні, яка відрізняється тим, що бічні профілі енкаітних зубів в кожній точці мають однакові радіуси кривизни з неспівпадаючими один з одним центрами кривизни, які розташовані поза лінією зачеплення, за виключенням полюсу зачеплення, до того ж як вихідні бічні профілі зубів виступають увігнуті дуги кіл,...
Попередній патент: Гідросистема гірничої машини
Наступний патент: Агрегат для поверхневого внесення твердих мінеральних добрив
Випадковий патент: Комплект регулюючих елементів вузла рейкового скріплення