Безпілотний літак-аерокоптер
Номер патенту: 122621
Опубліковано: 25.01.2018
Автори: Андрєєв Олександр Анатолійович, Віднічук Микола Антонович, Борова Валентина Євгенівна, Боровий Ярослав Анатолійович, Ковба Володимир Ігорович, Свистун Максим Васильович, Мороз Арсен Вікторович

Формула / Реферат
Безпілотний літак-аерокоптер, який включає фюзеляж, крило і хвостове оперення з елементами управління польотом, електромотори з гвинтами, шасі та бортове радіоелектронне обладнання з блоком живлення, який відрізняється тим, що електромотори з гвинтами розташовані в передній частині фюзеляжу по колу навколо його поздовжньої осі, а шасі розташоване в задній частині і виконане у вигляді хвостових опор.
Текст
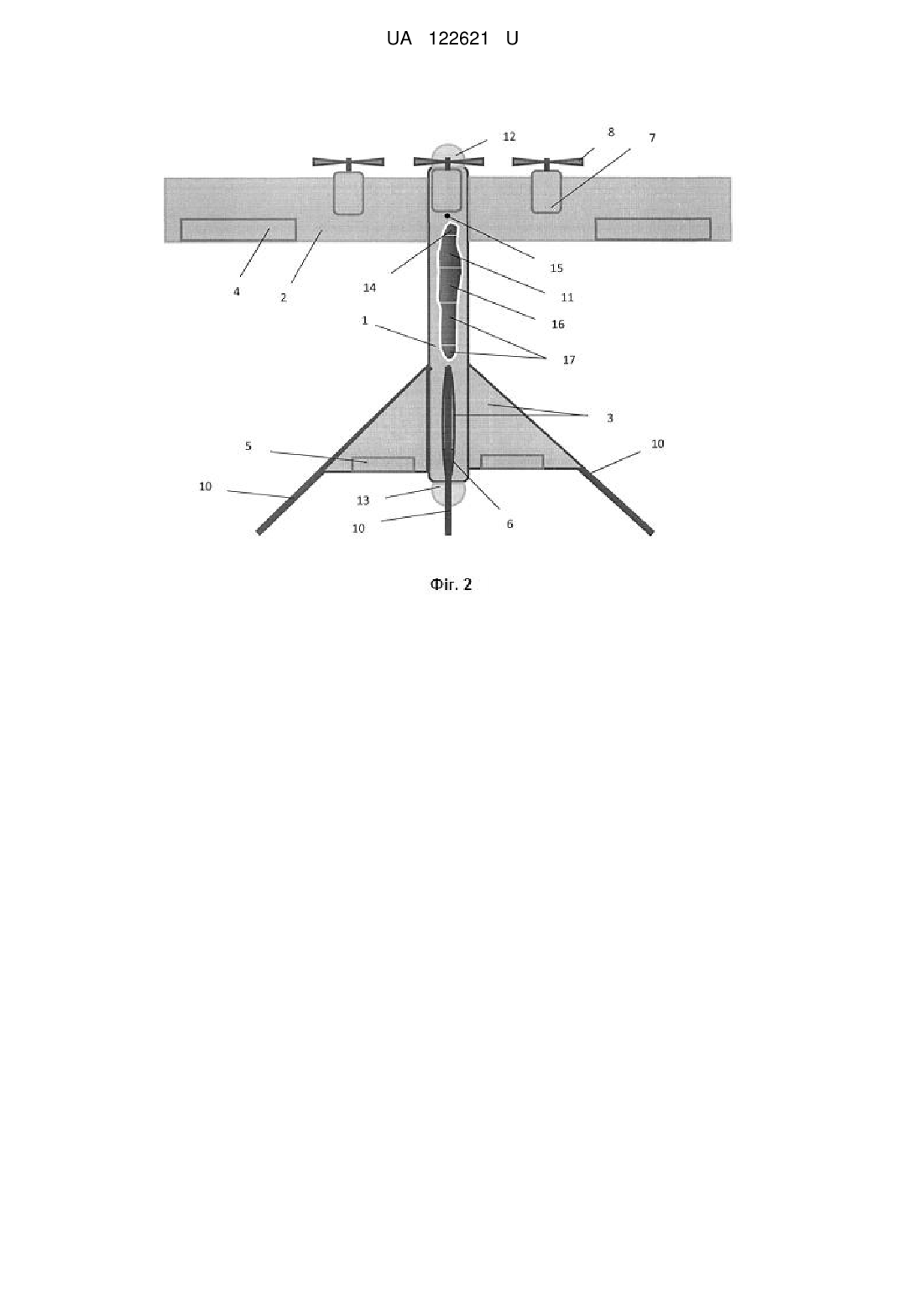
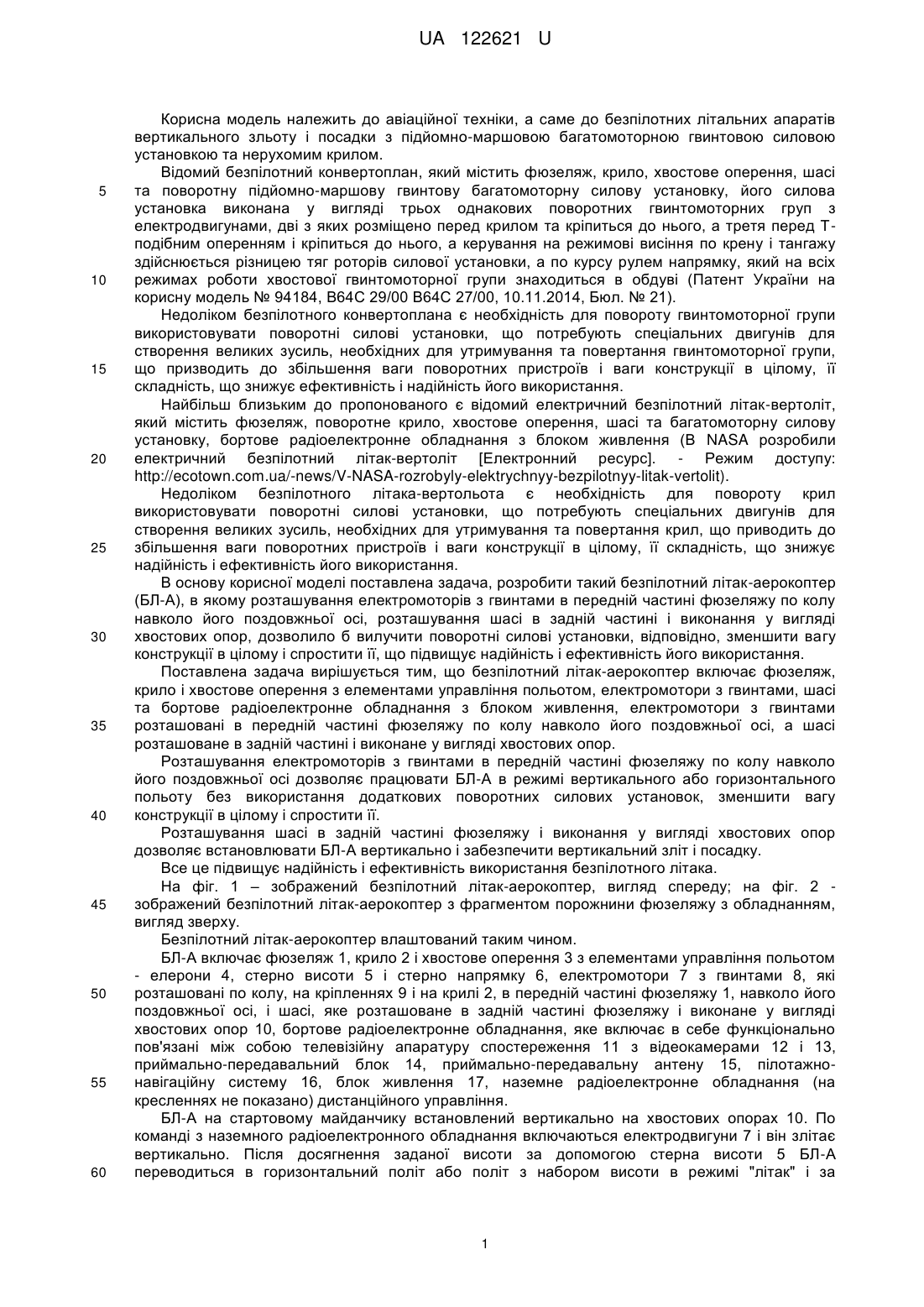
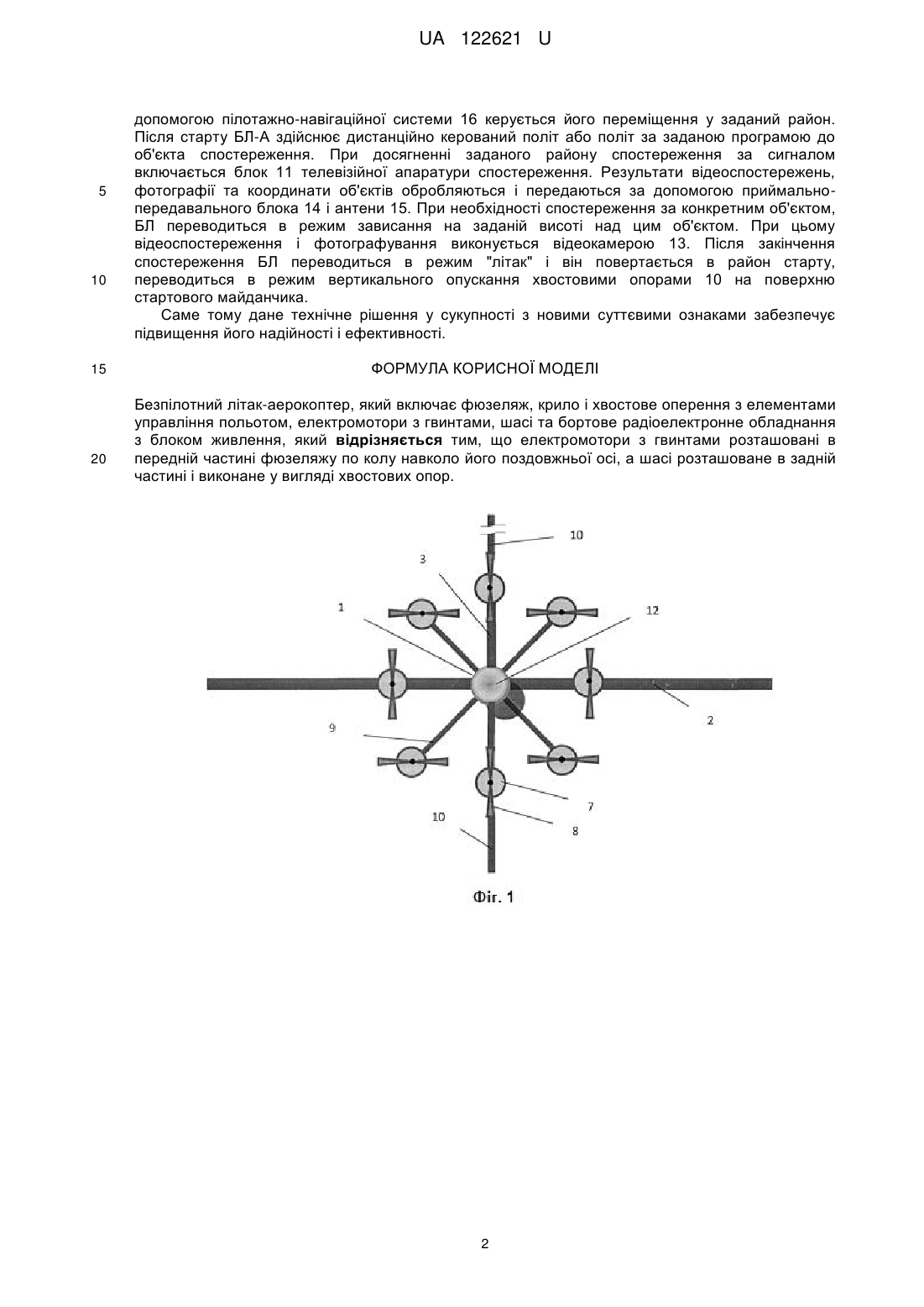
Реферат: Безпілотний літак-аерокоптер, який включає фюзеляж, крило і хвостове оперення з елементами управління польотом, електромотори з гвинтами, шасі та бортове радіоелектронне обладнання з блоком живлення, причому електромотори з гвинтами розташовані в передній частині фюзеляжу по колу навколо його поздовжньої осі, а шасі розташоване в задній частині і виконане у вигляді хвостових опор. UA 122621 U (12) UA 122621 U UA 122621 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до авіаційної техніки, а саме до безпілотних літальних апаратів вертикального зльоту і посадки з підйомно-маршовою багатомоторною гвинтовою силовою установкою та нерухомим крилом. Відомий безпілотний конвертоплан, який містить фюзеляж, крило, хвостове оперення, шасі та поворотну підйомно-маршову гвинтову багатомоторну силову установку, його силова установка виконана у вигляді трьох однакових поворотних гвинтомоторних груп з електродвигунами, дві з яких розміщено перед крилом та кріпиться до нього, а третя перед Тподібним оперенням і кріпиться до нього, а керування на режимові висіння по крену і тангажу здійснюється різницею тяг роторів силової установки, а по курсу рулем напрямку, який на всіх режимах роботи хвостової гвинтомоторної групи знаходиться в обдуві (Патент України на корисну модель № 94184, В64С 29/00 В64С 27/00, 10.11.2014, Бюл. № 21). Недоліком безпілотного конвертоплана є необхідність для повороту гвинтомоторної групи використовувати поворотні силові установки, що потребують спеціальних двигунів для створення великих зусиль, необхідних для утримування та повертання гвинтомоторної групи, що призводить до збільшення ваги поворотних пристроїв і ваги конструкції в цілому, її складність, що знижує ефективність і надійність його використання. Найбільш близьким до пропонованого є відомий електричний безпілотний літак-вертоліт, який містить фюзеляж, поворотне крило, хвостове оперення, шасі та багатомоторну силову установку, бортове радіоелектронне обладнання з блоком живлення (В NASA розробили електричний безпілотний літак-вертоліт [Електронний ресурс]. - Режим доступу: http://ecotown.com.ua/-news/V-NASA-rozrobyly-elektrychnyy-bezpilotnyy-litak-vertolit). Недоліком безпілотного літака-вертольота є необхідність для повороту крил використовувати поворотні силові установки, що потребують спеціальних двигунів для створення великих зусиль, необхідних для утримування та повертання крил, що приводить до збільшення ваги поворотних пристроїв і ваги конструкції в цілому, її складність, що знижує надійність і ефективність його використання. В основу корисної моделі поставлена задача, розробити такий безпілотний літак-аерокоптер (БЛ-А), в якому розташування електромоторів з гвинтами в передній частині фюзеляжу по колу навколо його поздовжньої осі, розташування шасі в задній частині і виконання у вигляді хвостових опор, дозволило б вилучити поворотні силові установки, відповідно, зменшити вагу конструкції в цілому і спростити її, що підвищує надійність і ефективність його використання. Поставлена задача вирішується тим, що безпілотний літак-аерокоптер включає фюзеляж, крило і хвостове оперення з елементами управління польотом, електромотори з гвинтами, шасі та бортове радіоелектронне обладнання з блоком живлення, електромотори з гвинтами розташовані в передній частині фюзеляжу по колу навколо його поздовжньої осі, а шасі розташоване в задній частині і виконане у вигляді хвостових опор. Розташування електромоторів з гвинтами в передній частині фюзеляжу по колу навколо його поздовжньої осі дозволяє працювати БЛ-А в режимі вертикального або горизонтального польоту без використання додаткових поворотних силових установок, зменшити вагу конструкції в цілому і спростити її. Розташування шасі в задній частині фюзеляжу і виконання у вигляді хвостових опор дозволяє встановлювати БЛ-А вертикально і забезпечити вертикальний зліт і посадку. Все це підвищує надійність і ефективність використання безпілотного літака. На фіг. 1 – зображений безпілотний літак-аерокоптер, вигляд спереду; на фіг. 2 зображений безпілотний літак-аерокоптер з фрагментом порожнини фюзеляжу з обладнанням, вигляд зверху. Безпілотний літак-аерокоптер влаштований таким чином. БЛ-А включає фюзеляж 1, крило 2 і хвостове оперення 3 з елементами управління польотом - елерони 4, стерно висоти 5 і стерно напрямку 6, електромотори 7 з гвинтами 8, які розташовані по колу, на кріпленнях 9 і на крилі 2, в передній частині фюзеляжу 1, навколо його поздовжньої осі, і шасі, яке розташоване в задній частині фюзеляжу і виконане у вигляді хвостових опор 10, бортове радіоелектронне обладнання, яке включає в себе функціонально пов'язані між собою телевізійну апаратуру спостереження 11 з відеокамерами 12 і 13, приймально-передавальний блок 14, приймально-передавальну антену 15, пілотажнонавігаційну систему 16, блок живлення 17, наземне радіоелектронне обладнання (на кресленнях не показано) дистанційного управління. БЛ-А на стартовому майданчику встановлений вертикально на хвостових опорах 10. По команді з наземного радіоелектронного обладнання включаються електродвигуни 7 і він злітає вертикально. Після досягнення заданої висоти за допомогою стерна висоти 5 БЛ-А переводиться в горизонтальний політ або політ з набором висоти в режимі "літак" і за 1 UA 122621 U 5 10 15 20 допомогою пілотажно-навігаційної системи 16 керується його переміщення у заданий район. Після старту БЛ-А здійснює дистанційно керований політ або політ за заданою програмою до об'єкта спостереження. При досягненні заданого району спостереження за сигналом включається блок 11 телевізійної апаратури спостереження. Результати відеоспостережень, фотографії та координати об'єктів обробляються і передаються за допомогою приймальнопередавального блока 14 і антени 15. При необхідності спостереження за конкретним об'єктом, БЛ переводиться в режим зависання на заданій висоті над цим об'єктом. При цьому відеоспостереження і фотографування виконується відеокамерою 13. Після закінчення спостереження БЛ переводиться в режим "літак" і він повертається в район старту, переводиться в режим вертикального опускання хвостовими опорами 10 на поверхню стартового майданчика. Саме тому дане технічне рішення у сукупності з новими суттєвими ознаками забезпечує підвищення його надійності і ефективності. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Безпілотний літак-аерокоптер, який включає фюзеляж, крило і хвостове оперення з елементами управління польотом, електромотори з гвинтами, шасі та бортове радіоелектронне обладнання з блоком живлення, який відрізняється тим, що електромотори з гвинтами розташовані в передній частині фюзеляжу по колу навколо його поздовжньої осі, а шасі розташоване в задній частині і виконане у вигляді хвостових опор. 2 UA 122621 U Комп’ютерна верстка О. Рябко Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B64C 29/00, B64C 27/00
Мітки: літак-аерокоптер, безпілотний
Код посилання
<a href="https://ua.patents.su/5-122621-bezpilotnijj-litak-aerokopter.html" target="_blank" rel="follow" title="База патентів України">Безпілотний літак-аерокоптер</a>
Бойовий тактичний аерокоптер

Номер патенту: 111377
Опубліковано: 10.11.2016
Автори: Ковба Володимир Ігорович, Боровий Ярослав Анатолійович, Борова Валентина Євгенівна, Мороз Арсен Вікторович, Андрєєв Олександр Анатолійович, Віднічук Микола Антонович
МПК: B64C 27/08
Мітки: аерокоптер, бойовій, тактичний
Формула / Реферат:
1. Бойовий тактичний аерокоптер, що містить раму, електромотори з гвинтами, виконавчий блок управління, апаратуру управління польотом, відеокамеру, який відрізняється тим, що на ньому закріплений відсік в порожнині якого розташований і зафіксований бойовий заряд з можливістю керованого виходу з цього відсіку.2. Бойовий тактичний аерокоптер за п. 1, який відрізняється тим, що бойовий заряд виконаний у вигляді ручної осколкової гранати...
Бойовий тактичний аерокоптер “оса”

Номер патенту: 115392
Опубліковано: 10.04.2017
Автори: Мороз Арсен Вікторович, Борова Валентина Євгенівна, Ковба Володимир Ігорович, Боровий Ярослав Анатолійович, Андрєєв Олександр Анатолійович, Віднічук Микола Антонович, Свистун Максим Васильович
МПК: B64C 29/02, B64C 27/22, B64C 27/08
Мітки: osa, аерокоптер, бойовій, тактичний
Формула / Реферат:
1. Бойовий тактичний аерокоптер, який включає раму, електромотори з гвинтами, виконавчий блок управління, апаратуру управління польотом, відеокамеру, закріплений на ньому транспортний відсік, в якому коаксіально встановлений фіксуючий відсік, в порожнині відсіків розташований і зафіксований бойовий заряд з можливістю керованого виходу з них, який відрізняється тим, що у відсіках бокові поверхні виконані із прорізами.2. Бойовий...
Безпілотний літальний апарат
Номер патенту: 101039
Опубліковано: 25.08.2015
Автори: Корченюк Вячеслав Павлович, Помогаєв Сергій Андрійович, Діхтяренко Володимир Миколайович, Священко Юрій Іванович
МПК: B64C 39/02, B64C 3/00
Мітки: літальний, безпілотний, апарат
Формула / Реферат:
Безпілотний літальний апарат, що складається з двигуна, фюзеляжу, оперення, крила, що містить основну частину крила з основними елеронами з приводом і відокремлювані частини крила з додатковими секціями елеронів, який відрізняється тим, що по внутрішнім торцям додаткових секцій елеронів на хвостових частинах по контуру крила закріплено V-подібний у повздовжньому перерізі елемент, що виступає за торець і взаємодіє з елероном основної частини...
Безпілотний літальний апарат з відеопристроєм

Номер патенту: 75911
Опубліковано: 25.12.2012
Автори: Харченко Володимир Петрович, Священко Юрій Іванович, Корченюк Вячеслав Павлович, Кабанячий Володимир Володимирович
МПК: B64C 39/02
Мітки: літальний, безпілотний, відеопристроєм, апарат
Формула / Реферат:
Безпілотний літальний апарат з відеопристроєм, що має фюзеляж, високорозташоване крило з силовою установкою, відеопристрій у сферичному корпусі, закріплений на нижній частині фюзеляжу, трьохопорне шасі з носовим колесом з обтічниками коліс, виконаними з закругленою носовою частиною, середньою частиною, яка наближена до циліндричної і охоплює колесо, й загостреною хвостовою частиною, який відрізняється тим, що обтічник носового колеса...
Безпілотний літальний апарат

Номер патенту: 104263
Опубліковано: 25.01.2016
Автор: КОРПОРАЦІЯ "НАУКОВИЙ ПАРК "КИЇВСЬКА ПОЛІТЕХНІКА"
МПК: B64C 3/10, B64C 1/00, B64C 3/14
Мітки: безпілотний, літальний, апарат
Формула / Реферат:
1. Безпілотний літальний апарат, що включає фюзеляж, на якому встановлені стріловидні крила з аеродинамічними органами керування, та силову установку з рушієм, який відрізняється тим, що довжина фюзеляжу більша за кореневу хорду крила, крила мають S-подібний профіль, силова установка з рушієм обладнана бензобаком та встановлена у передній або задній частині фюзеляжу.2. Безпілотний літальний апарат за пунктом 1, який відрізняється тим,...
Попередній патент: Трансформаційне робоче обладнання екскаватора
Наступний патент: Трансформаційне робоче обладнання
Випадковий патент: Композитний матеріал для заповнення кісткових дефектів