Трансформаційне робоче обладнання
Номер патенту: 122622
Опубліковано: 25.01.2018
Автори: Мелашич Василь Васильович, Мелашич Сергій Васильович

Формула / Реферат
Трансформаційне робоче обладнання, що включає гідрокеровані основу стріли, головну частину стріли та телескопічну стрілу, яка складається з нерухомої секції та рухомої секції, оснащеної жорстко змонтованою щелепою, яке відрізняється тим, що щелепа на рухомій секції встановлена шарнірно і з'єднана з нею тягою, а на нерухомій секції шарнірно змонтована додаткова щелепа, з'єднана за допомогою додаткової тяги та двоплечого важеля з гідроциліндром керування.
Текст
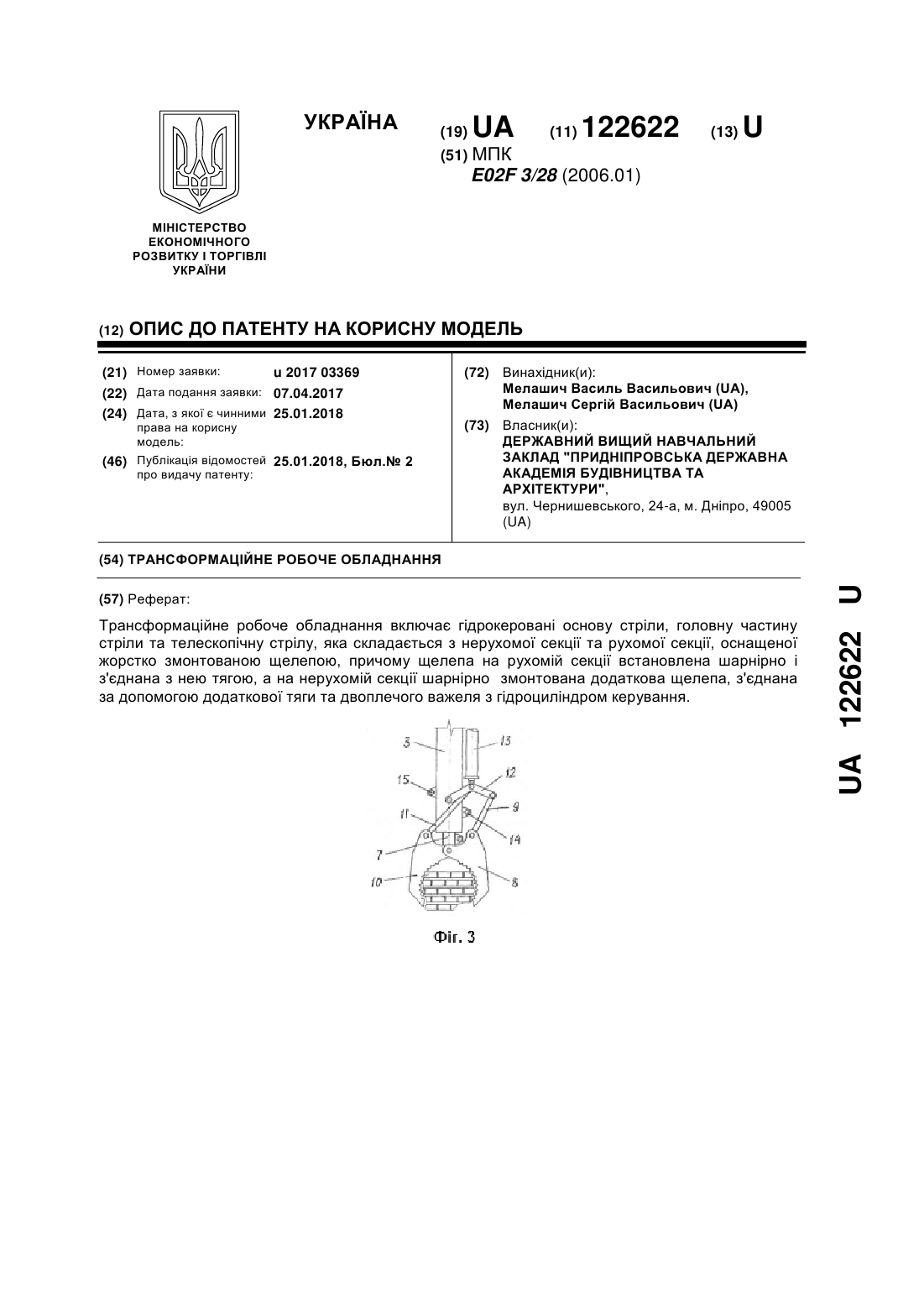
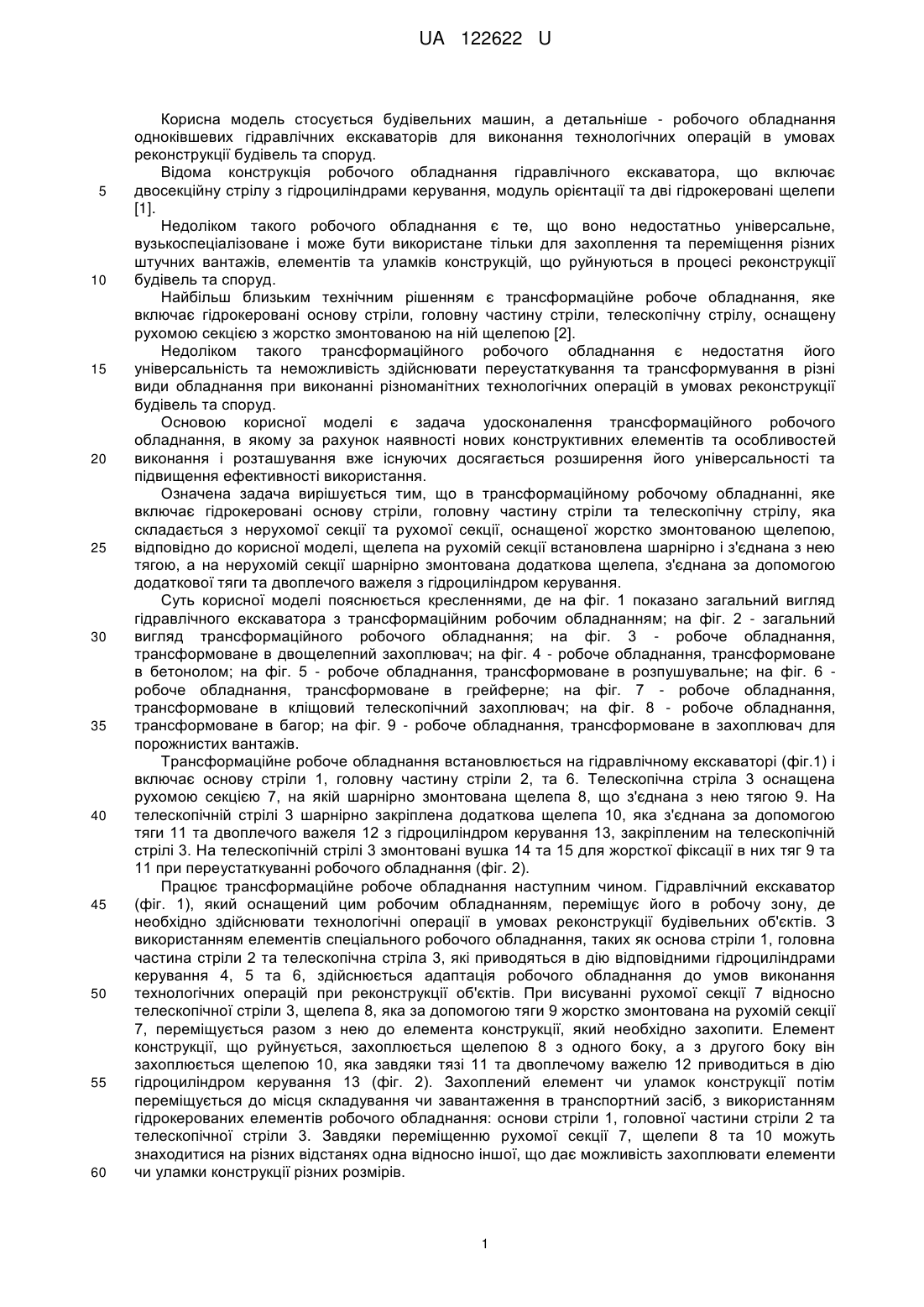
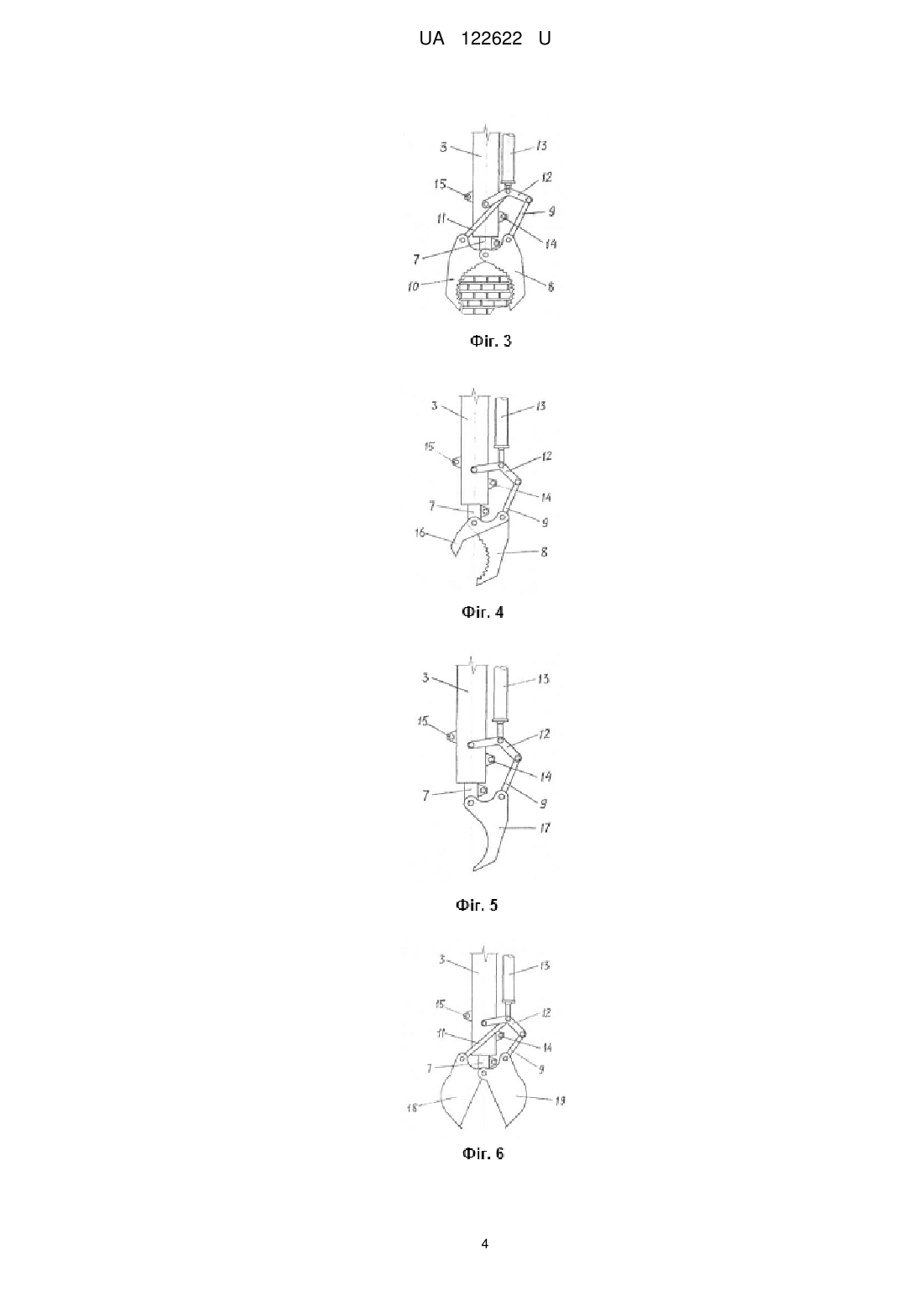
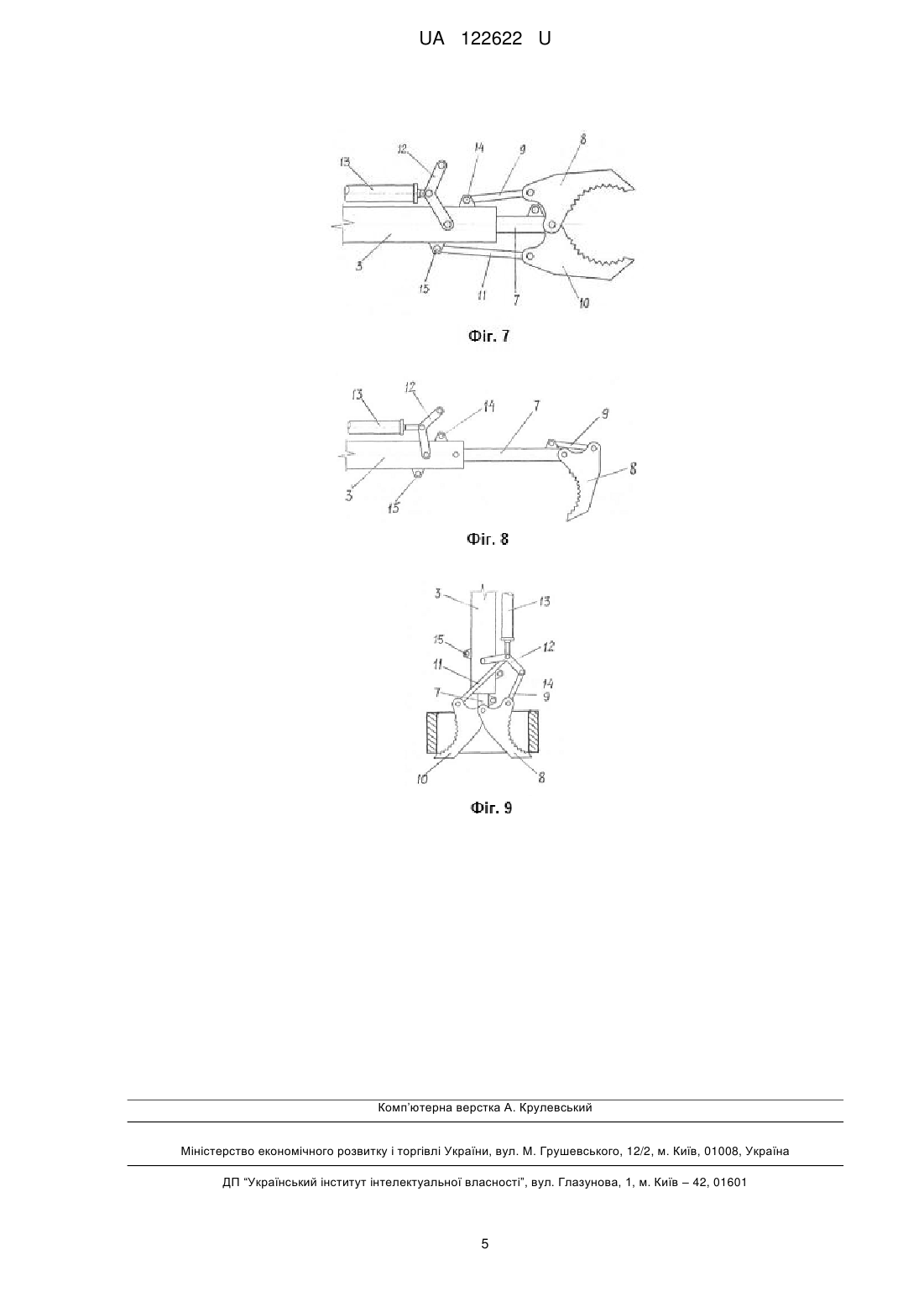
Реферат: Трансформаційне робоче обладнання включає гідрокеровані основу стріли, головну частину стріли та телескопічну стрілу, яка складається з нерухомої секції та рухомої секції, оснащеної жорстко змонтованою щелепою, причому щелепа на рухомій секції встановлена шарнірно і з'єднана з нею тягою, а на нерухомій секції шарнірно змонтована додаткова щелепа, з'єднана за допомогою додаткової тяги та двоплечого важеля з гідроциліндром керування. UA 122622 U (54) ТРАНСФОРМАЦІЙНЕ РОБОЧЕ ОБЛАДНАННЯ UA 122622 U UA 122622 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель стосується будівельних машин, а детальніше - робочого обладнання одноківшевих гідравлічних екскаваторів для виконання технологічних операцій в умовах реконструкції будівель та споруд. Відома конструкція робочого обладнання гідравлічного екскаватора, що включає двосекційну стрілу з гідроциліндрами керування, модуль орієнтації та дві гідрокеровані щелепи [1]. Недоліком такого робочого обладнання є те, що воно недостатньо універсальне, вузькоспеціалізоване і може бути використане тільки для захоплення та переміщення різних штучних вантажів, елементів та уламків конструкцій, що руйнуються в процесі реконструкції будівель та споруд. Найбільш близьким технічним рішенням є трансформаційне робоче обладнання, яке включає гідрокеровані основу стріли, головну частину стріли, телескопічну стрілу, оснащену рухомою секцією з жорстко змонтованою на ній щелепою [2]. Недоліком такого трансформаційного робочого обладнання є недостатня його універсальність та неможливість здійснювати переустаткування та трансформування в різні види обладнання при виконанні різноманітних технологічних операцій в умовах реконструкції будівель та споруд. Основою корисної моделі є задача удосконалення трансформаційного робочого обладнання, в якому за рахунок наявності нових конструктивних елементів та особливостей виконання і розташування вже існуючих досягається розширення його універсальності та підвищення ефективності використання. Означена задача вирішується тим, що в трансформаційному робочому обладнанні, яке включає гідрокеровані основу стріли, головну частину стріли та телескопічну стрілу, яка складається з нерухомої секції та рухомої секції, оснащеної жорстко змонтованою щелепою, відповідно до корисної моделі, щелепа на рухомій секції встановлена шарнірно і з'єднана з нею тягою, а на нерухомій секції шарнірно змонтована додаткова щелепа, з'єднана за допомогою додаткової тяги та двоплечого важеля з гідроциліндром керування. Суть корисної моделі пояснюється кресленнями, де на фіг. 1 показано загальний вигляд гідравлічного екскаватора з трансформаційним робочим обладнанням; на фіг. 2 - загальний вигляд трансформаційного робочого обладнання; на фіг. 3 - робоче обладнання, трансформоване в двощелепний захоплювач; на фіг. 4 - робоче обладнання, трансформоване в бетонолом; на фіг. 5 - робоче обладнання, трансформоване в розпушувальне; на фіг. 6 робоче обладнання, трансформоване в грейферне; на фіг. 7 - робоче обладнання, трансформоване в кліщовий телескопічний захоплювач; на фіг. 8 - робоче обладнання, трансформоване в багор; на фіг. 9 - робоче обладнання, трансформоване в захоплювач для порожнистих вантажів. Трансформаційне робоче обладнання встановлюється на гідравлічному екскаваторі (фіг.1) і включає основу стріли 1, головну частину стріли 2, та 6. Телескопічна стріла 3 оснащена рухомою секцією 7, на якій шарнірно змонтована щелепа 8, що з'єднана з нею тягою 9. На телескопічній стрілі 3 шарнірно закріплена додаткова щелепа 10, яка з'єднана за допомогою тяги 11 та двоплечого важеля 12 з гідроциліндром керування 13, закріпленим на телескопічній стрілі 3. На телескопічній стрілі 3 змонтовані вушка 14 та 15 для жорсткої фіксації в них тяг 9 та 11 при переустаткуванні робочого обладнання (фіг. 2). Працює трансформаційне робоче обладнання наступним чином. Гідравлічний екскаватор (фіг. 1), який оснащений цим робочим обладнанням, переміщує його в робочу зону, де необхідно здійснювати технологічні операції в умовах реконструкції будівельних об'єктів. З використанням елементів спеціального робочого обладнання, таких як основа стріли 1, головна частина стріли 2 та телескопічна стріла 3, які приводяться в дію відповідними гідроциліндрами керування 4, 5 та 6, здійснюється адаптація робочого обладнання до умов виконання технологічних операцій при реконструкції об'єктів. При висуванні рухомої секції 7 відносно телескопічної стріли 3, щелепа 8, яка за допомогою тяги 9 жорстко змонтована на рухомій секції 7, переміщується разом з нею до елемента конструкції, який необхідно захопити. Елемент конструкції, що руйнується, захоплюється щелепою 8 з одного боку, а з другого боку він захоплюється щелепою 10, яка завдяки тязі 11 та двоплечому важелю 12 приводиться в дію гідроциліндром керування 13 (фіг. 2). Захоплений елемент чи уламок конструкції потім переміщується до місця складування чи завантаження в транспортний засіб, з використанням гідрокерованих елементів робочого обладнання: основи стріли 1, головної частини стріли 2 та телескопічної стріли 3. Завдяки переміщенню рухомої секції 7, щелепи 8 та 10 можуть знаходитися на різних відстанях одна відносно іншої, що дає можливість захоплювати елементи чи уламки конструкції різних розмірів. 1 UA 122622 U 5 10 15 20 25 30 35 40 45 50 55 Для завантаження малокускових вантажів, при прибиранні будівельного сміття, робоче обладнання може бути трансформоване в двощелепний захоплювач. При цьому щелепа 10 закріплюється співвісно зі щелепою 8 на рухомій секції 7, а тяги 9 та 11 прикріплюються до двоплечого важеля 12, що приводиться в дію гідроциліндром керування 13 (фіг. 3). Щелепами 8 та 10 за рахунок зусилля гідроциліндра керування 13 здійснюється захоплення елемента будівельної конструкції, що підлягає руйнуванню, чи зачерпування будівельного сміття. При цьому зусилля від гідроциліндра керування 13 передаються на щелепи 8 та 10 завдяки двоплечому важелю 12 і тягам 9 та 11. При висуванні штока гідроциліндра керування 13 щелепи 8 та 10 повертаються відносно шарніра кріплення до рухомої секції 7 назустріч одна одній, а при втягуванні штока гідроциліндра керування 13 вони, навпаки, розходяться в різні боки. Щелепи 8 та 10 можуть приводитися в дію також при висування чи втягуванні рухомої секції 7 відносно телескопічної стріли 3, за умови виключення гідроциліндра керування 13. При висуванні рухомої секції 7 щелепи 8 та 10 розходяться в різні боки, а при втягуванні рухомої секції 7 вони повертаються назустріч одна одній. Для руйнування асфальтобетонних покрить робоче обладнання може бути трансформоване в бетонолом. В такому виконанні щелепа 10 разом з тягою 11 демонтуються і замість щелепи 10 встановлюється співвісно зі щелепою 8, з забезпеченням жорсткої фіксації відносно неї, упор 16 (фіг. 4). Застосування такого робочого обладнання дозволяє виконувати роботи по руйнуванню асфальтобетонного покриття в умовах реконструкції, не створюючи шуму, що дає можливість, на відміну від гідромолотів та перфораторів, використовувати його в нічний час в умовах міської забудови. Якщо демонтувати упор 16 та здійснити заміну щелепи 8 на зуб-розпушувач 17, робоче обладнання трансформується в розпушувальне і може бути використане для руйнування міцних матеріалів, мерзлих ґрунтів, демонтажу тротуарної плитки (фіг. 5). Замість щелеп 8 та 10 можуть бути встановлені напівковші 18 та 19, що дасть можливість трансформувати робоче обладнання в грейферне (фіг. 6), яке може бути використане для навантаження сипучих, дрібнокускових та штучних вантажів. В умовах відносно нескладного переустаткування робоче обладнання можна трансформувати в кліщовий телескопічних захоплювач. При цьому тяги 9 та 11 відокремлюються від двоплечого важеля 12 і закріплюються відповідно у вушках 14 та 15 (фіг. 7). В такому виконанні робочого обладнання управління щелепами 8 та 10 здійснюється при висуванні чи втягуванні рухомої секції 7 відносно телескопічної стріли 3. Для запобігання від пошкодження, чи в умовах переміщення робочого органа в вузький отвір, гідроциліндр керування 13 разом з двоплечим важелем 12 можуть бути демонтованими. Оскільки гідроциліндр приводу рухомої секції 7 знаходиться у внутрішній порожнині телескопічної стріли 3, виключається контакт приводного гідроциліндра з розроблюваним середовищем. Це виключає випадкові пошкодження штока гідроциліндра від падаючих частин конструкції, яка руйнується, та підвищує надійність обладнання. При виконанні робіт по руйнуванню будівель та споруд, що зносяться, робоче обладнання може бути трансформоване в кирку чи багор. В такому варіанті робочого обладнання демонтується щелепа 10 разом з тягою 11, а щелепа 8 за допомогою тяги 9 жорстко закріплюється на рухомій секції 7 телескопічної стріли 3 (фіг. 8). При втягуванні рухомої секції 7 щелепа 8 захоплює конструкцію, яка підлягає руйнуванню, та скидає її вниз. На рухомій секції 7 замість щелепи 8 можуть бути закріплені інші змінні робочі органи для обвалення різних типів конструкцій будівель. Конструктивне виконання обвалювача у вигляді багра можебути використане для обвалення металевих конструкцій у будівлях. Для захоплення та подальшого переміщення порожнистих вантажів робоче обладнання може бути трансформоване до вигляду, який представлений на фіг. 9. В цьому варіанті щелепи 8 та 10 розвертаються на 180° в різні боки. Порожнистий вантаж, який необхідно перемістити, захоплюється щелепами 8 та 10 зсередини. Замість щелеп 8 та 10 можуть бути встановлені Гподібні захоплювачі чи якісь інші конструкції захоплювачів. Розроблена конструкція трансформаційного робочого обладнання дозволить виконувати широкий спектр технологічних операцій в умовах реконструкції будівельних об'єктів, при відносно нескладному переустаткуванні робочого обладнання, з забезпеченням повної адаптації його до виконання окремого виду робіт, розширення його універсальності та підвищення ефективності використання. Джерела інформації: 1. Френкель Г. Ю. Роботизация процессов в строительстве. - М.: Стройиздат, 1987, стр. 78, рис. 17. 2 UA 122622 U 2. Королев А.В., Королева М.В. Одноковшовые экскаваторы с рабочим оборудованием для сноса зданий // Механизация строительства. - 2000. - №5, стр. 16, рис. 4. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 Трансформаційне робоче обладнання, що включає гідрокеровані основу стріли, головну частину стріли та телескопічну стрілу, яка складається з нерухомої секції та рухомої секції, оснащеної жорстко змонтованою щелепою, яке відрізняється тим, що щелепа на рухомій секції встановлена шарнірно і з'єднана з нею тягою, а на нерухомій секції шарнірно змонтована додаткова щелепа, з'єднана за допомогою додаткової тяги та двоплечого важеля з гідроциліндром керування. 3 UA 122622 U 4 UA 122622 U Комп’ютерна верстка А. Крулевський Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: E02F 3/28
Мітки: робоче, обладнання, трансформаційне
Код посилання
<a href="https://ua.patents.su/7-122622-transformacijjne-roboche-obladnannya.html" target="_blank" rel="follow" title="База патентів України">Трансформаційне робоче обладнання</a>
Трансформаційне робоче обладнання екскаватора
Номер патенту: 43642
Опубліковано: 25.08.2009
Автори: Мелашич Сергій Васильович, Січко Ігор Миколайович, Мелашич Василь Васильович
МПК: E02F 3/28
Мітки: трансформаційне, обладнання, робоче, екскаватора
Формула / Реферат:
Трансформаційне робоче обладнання екскаватора, що включає рукоять, ківш, який складається з передньої та задньої гідрокерованих щелеп, причому передня щелепа містить бокові стінки і днище з ріжучими зубцями, яке відрізняється тим, що передня щелепа по всій ширині оснащена жорсткою шторкою, а бокові стінки складаються з двох частин, з'єднаних між собою за допомогою шарнірів, до яких прикріплене днище з ріжучими зубцями.
Спеціальне робоче обладнання для реконструкції
Номер патенту: 122617
Опубліковано: 25.01.2018
Автори: Мелашич Сергій Васильович, Мелашич Василь Васильович
МПК: E02F 9/14
Мітки: обладнання, робоче, реконструкції, спеціальне
Формула / Реферат:
Спеціальне робоче обладнання для реконструкції, що містить гідрокеровані основу стріли, головну частину стріли та телескопічну стрілу, яка складається з нерухомої секції та рухомої секції, яку оснащено жорстко змонтованою щелепою, яке відрізняється тим, що щелепу, встановлено на рухомій секції шарнірно, має додатковий гідроциліндр керування, а з зовнішнього боку рухомої секції жорстко змонтовано упор клиноподібної форми.
Трансформаційне робоче обладнання екскаватора
Номер патенту: 122620
Опубліковано: 25.01.2018
Автори: Мелашич Василь Васильович, Мелашич Сергій Васильович
МПК: E02F 3/28
Мітки: екскаватора, трансформаційне, робоче, обладнання
Формула / Реферат:
Трансформаційне робоче обладнання екскаватора, що містить рукоять, до якої шарнірно прикріплена поворотна рамка оснащена гідроциліндром керування та монтажними пальцями, яке відрізняється тим, що до поворотної рамки з обох боків шарнірно прикріплені два двоплечих важелі, які з одного боку, за допомогою двох додаткових шарнірно-важільних механізмів, з'єднані з додатковим гідроциліндром керування, змонтованим на поворотній рамці, а з другого...
Трансформаційне робоче обладнання для реконструктивних робіт
Номер патенту: 78913
Опубліковано: 10.04.2013
Автори: Мелашич Василь Васильович, Душко Віталій Валерійович
МПК: E02F 3/28
Мітки: робіт, робоче, обладнання, трансформаційне, реконструктивних
Формула / Реферат:
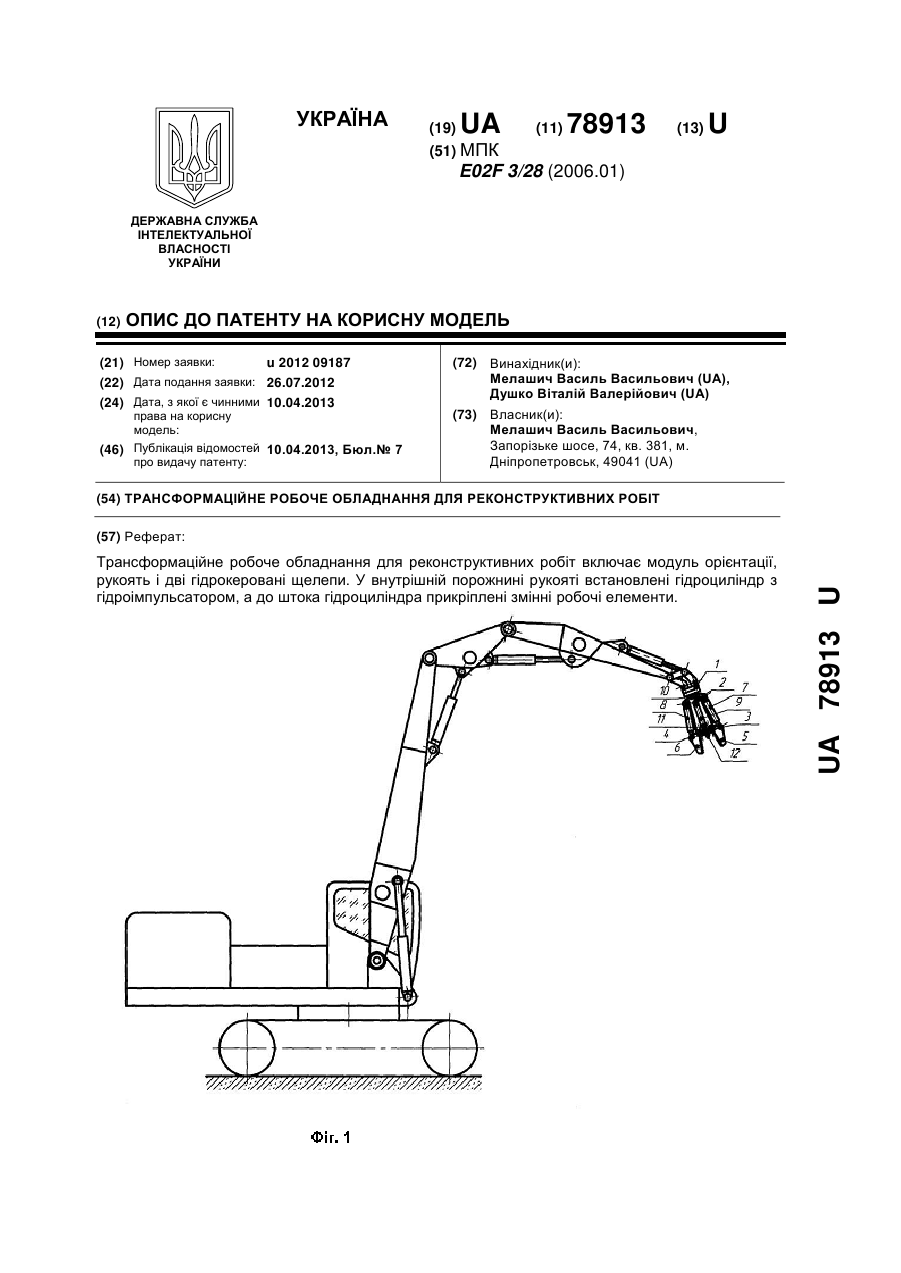
Трансформаційне робоче обладнання для реконструктивних робіт, що включає модуль орієнтації, рукоять, дві гідрокеровані щелепи, яке відрізняється тим, що у внутрішній порожнині рукояті додатково встановлені гідроциліндр з гідроімпульсатором, а до штока гідроциліндра прикріплені змінні робочі елементи.
Трансформаційне робоче обладнання екскаватора
Номер патенту: 38587
Опубліковано: 12.01.2009
Автори: Мелашич Сергій Васильович, Мелашич Василь Васильович
МПК: E02F 3/28
Мітки: обладнання, трансформаційне, робоче, екскаватора
Формула / Реферат:
Трансформаційне робоче обладнання екскаватора, що містить рукоять, ківш, передній та задній гідрокеровані захоплювачі, двоплечий важіль з гідроциліндром керування, яке відрізняється тим, що задній захоплювач шарнірно, за допомогою поворотної рамки, з'єднаний з рукояттю співвісно з ковшем з можливістю шорсткої фіксації до його бокових стінок, а передній захоплювач змонтований у внутрішній порожнині ковша, з'єднаний шарнірно з поворотною рамкою...
Попередній патент: Безпілотний літак-аерокоптер
Наступний патент: Механічний диспергатор із зовнішніми кільцями
Випадковий патент: Фільтр для очищення газу