Автоматизований пристрій для закріплення рухомого складу залізничного транспорту
Номер патенту: 14982
Опубліковано: 04.03.1997
Автори: Безверхій Віталій Григорович, Іончиков Анатолій Миколайович, Каплун Микола Дмитрович, Новіков Григорій Іванович, Шевченко Віктор Михайлович, Потапов Ігор Ільіч, Літвінцев Микола Олексійович
Формула / Реферат
1 Автоматизированное устройство для закрепления подвижного железнодорожного состава, включающее привод с блоком управления и источником литания, датчик положения железнодорожного состава с контактными элементами, датчик положения подвижного закрепляющего модуля с контактными элементами и ограничителями хода и блок сигнализации с другим источником питания, отличающееся тем, что блок управления приводом включает размыкающий ключевой элемент, на вход которого подключен один из выходов первого источника питания, а на выход- первый замыкающий контактный элемент датчика положения железнодорожного состава, выход которого подсоединен к двум параллельным ветвям, каждая из которых содержит ключ выбора режимов управления приводом с парой переключающих контактных элементов, два параллельно соединенных ключевых элемента, параллельно которым подключен замыкающий контактный элемент одного из пускателей, выходы которых подключены к входу размыкающего контактного элемента другого пускателя, своим выходом подключенного к входу первого пускателя, выход которого подключен к входу одного из размыкающих контактных элементов датчика положения подвижного закрепляющего модуля, выход которого подключен к другому выходу первого источника питания, при этом силовые контактные элементы одного и второго пускателей соединены параллельно и подсоединены на вход привода, причем другие контактные элементы датчика положения железнодорожного состава, ключа выбора режимов, управления приводом и одного и другого датчиков положения подвижного закрепляющего модуля соединены параллельно и подсоединены входами к одному из выходов второго источника питания, а выходами к сигнальным элементам, выходы которых подключены к второму выходу второго источника питания.
2. Автоматизированное устройство для закрепления подвижного состава по п.1, отличающееся тем, что датчик положения железнодорожного состава выполнен в виде магнитоупругого преобразователя, магнитоупругий элемент которого размещен под подошвой рельса в месте установки закрепляющего модуля.
3. Автоматизированное устройство для закрепления подвижного состава по п.1, отличающееся тем, что датчики положения подвижного закрепляющего модуля выполнены в виде концевых выключателей и размещены по обе стороны подвижного закрепляющего модуля с возможностью взаимодействия с ограничителями его хода.
Текст
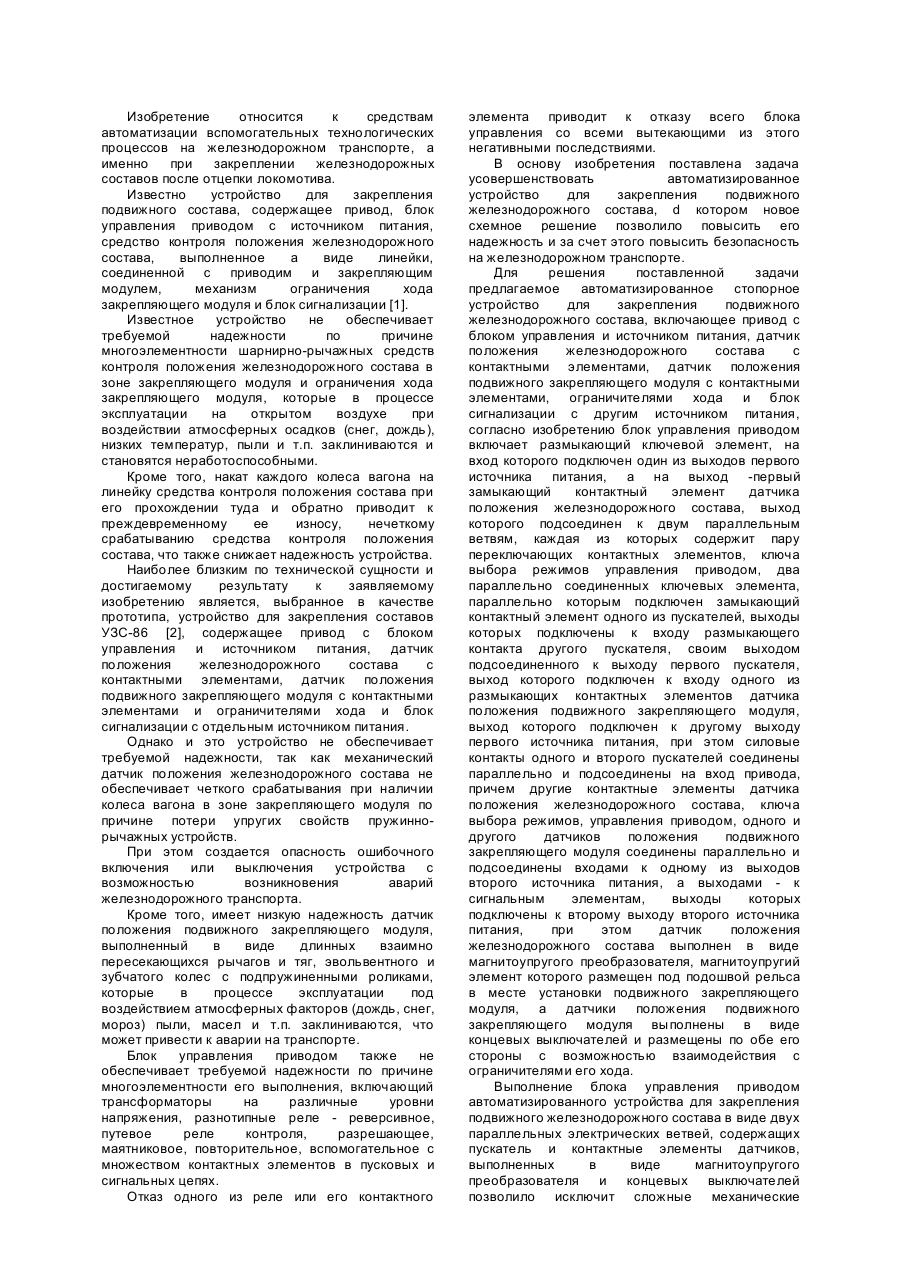
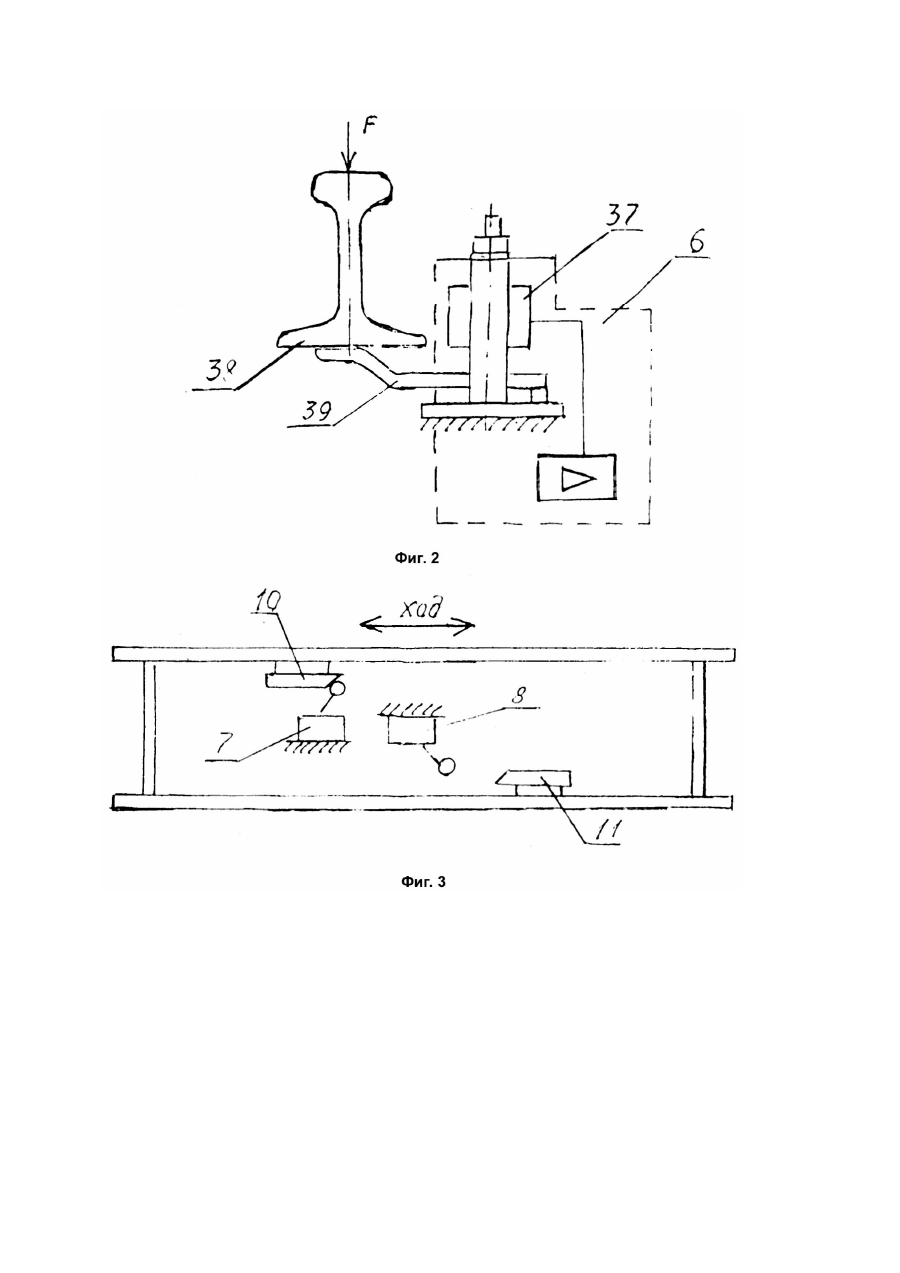
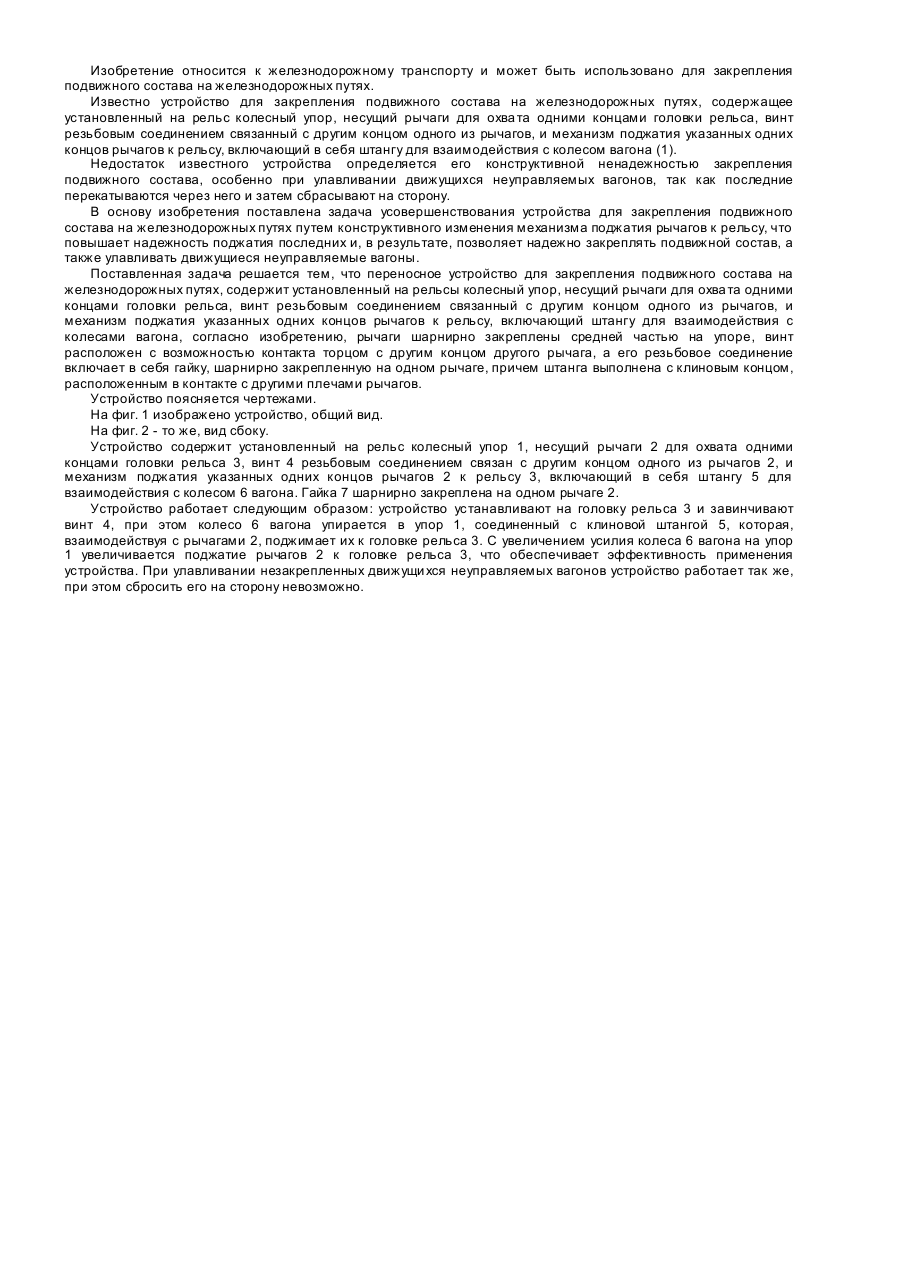
Изобретение относится к средствам автоматизации вспомогательных технологических процессов на железнодорожном транспорте, а именно при закреплении железнодорожных составов после отцепки локомотива. Известно устройство для закрепления подвижного состава, содержащее привод, блок управления приводом с источником питания, средство контроля положения железнодорожного состава, выполненное а виде линейки, соединенной с приводим и закрепляющим модулем, механизм ограничения хода закрепляющего модуля и блок сигнализации [1]. Известное устройство не обеспечивает требуемой надежности по причине многоэлементности шарнирно-рычажных средств контроля положения железнодорожного состава в зоне закрепляющего модуля и ограничения хода закрепляющего модуля, которые в процессе эксплуатации на открытом воздухе при воздействии атмосферных осадков (снег, дождь), низких температур, пыли и т.п. заклиниваются и становятся неработоспособными. Кроме того, накат каждого колеса вагона на линейку средства контроля положения состава при его прохождении туда и обратно приводит к преждевременному ее износу, нечеткому срабатыванию средства контроля положения состава, что также снижает надежность устройства. Наиболее близким по технической сущности и достигаемому результату к заявляемому изобретению является, выбранное в качестве прототипа, устройство для закрепления составов УЗС-86 [2], содержащее привод с блоком управления и источником питания, датчик положения железнодорожного состава с контактными элементами, датчик положения подвижного закрепляющего модуля с контактными элементами и ограничителями хода и блок сигнализации с отдельным источником питания. Однако и это устройство не обеспечивает требуемой надежности, так как механический датчик положения железнодорожного состава не обеспечивает четкого срабатывания при наличии колеса вагона в зоне закрепляющего модуля по причине потери упругих свойств пружиннорычажных устройств. При этом создается опасность ошибочного включения или выключения устройства с возможностью возникновения аварий железнодорожного транспорта. Кроме того, имеет низкую надежность датчик положения подвижного закрепляющего модуля, выполненный в виде длинных взаимно пересекающихся рычагов и тяг, эвольвентного и зубчатого колес с подпружиненными роликами, которые в процессе эксплуатации под воздействием атмосферных факторов (дождь, снег, мороз) пыли, масел и т.п. заклиниваются, что может привести к аварии на транспорте. Блок управления приводом также не обеспечивает требуемой надежности по причине многоэлементности его выполнения, включающий трансформаторы на различные уровни напряжения, разнотипные реле - реверсивное, путевое реле контроля, разрешающее, маятниковое, повторительное, вспомогательное с множеством контактных элементов в пусковых и сигнальных цепях. Отказ одного из реле или его контактного элемента приводит к отказу всего блока управления со всеми вытекающими из этого негативными последствиями. В основу изобретения поставлена задача усовершенствовать автоматизированное устройство для закрепления подвижного железнодорожного состава, d котором новое схемное решение позволило повысить его надежность и за счет этого повысить безопасность на железнодорожном транспорте. Для решения поставленной задачи предлагаемое автоматизированное стопорное устройство для закрепления подвижного железнодорожного состава, включающее привод с блоком управления и источником питания, датчик положения железнодорожного состава с контактными элементами, датчик положения подвижного закрепляющего модуля с контактными элементами, ограничителями хода и блок сигнализации с другим источником питания, согласно изобретению блок управления приводом включает размыкающий ключевой элемент, на вход которого подключен один из выходов первого источника питания, а на выход -первый замыкающий контактный элемент датчика положения железнодорожного состава, выход которого подсоединен к двум параллельным ветвям, каждая из которых содержит пару переключающих контактных элементов, ключа выбора режимов управления приводом, два параллельно соединенных ключевых элемента, параллельно которым подключен замыкающий контактный элемент одного из пускателей, выходы которых подключены к входу размыкающего контакта другого пускателя, своим выходом подсоединенного к выходу первого пускателя, выход которого подключен к входу одного из размыкающих контактных элементов датчика положения подвижного закрепляющего модуля, выход которого подключен к другому выходу первого источника питания, при этом силовые контакты одного и второго пускателей соединены параллельно и подсоединены на вход привода, причем другие контактные элементы датчика положения железнодорожного состава, ключа выбора режимов, управления приводом, одного и другого датчиков положения подвижного закрепляющего модуля соединены параллельно и подсоединены входами к одному из выходов второго источника питания, а выходами - к сигнальным элементам, выходы которых подключены к второму выходу второго источника питания, при этом датчик положения железнодорожного состава выполнен в виде магнитоупругого преобразователя, магнитоупругий элемент которого размещен под подошвой рельса в месте установки подвижного закрепляющего модуля, а датчики положения подвижного закрепляющего модуля выполнены в виде концевых выключателей и размещены по обе его стороны с возможностью взаимодействия с ограничителями его хода. Выполнение блока управления приводом автоматизированного устройства для закрепления подвижного железнодорожного состава в виде двух параллельных электрических ветвей, содержащих пускатель и контактные элементы датчиков, выполненных в виде магнитоупругого преобразователя и концевых выключателей позволило исключит сложные механические пружинно-рычажные малонадежные узлы и создать однородную электрическую систему управления, что позволило повысить надежность устройства для закрепления подвижного состава. На фиг.1 изображена упрощенная кинематическая схема подвижного закрепляющего модуля, блок-схема управления приводом и блок сигнализации; на фиг 2 - кинематическая схема датчика положения железнодорожного состава с магнитоупругим преобразователем; на фиг.3 кинематическая схема датчика положения подвижного закрепляющего модуля с контактными элементами. Автоматизированное устройство для закрепления подвижного железнодорожного состава содержит привод 1, в качестве которого используется мотор-редуктор с элементами трансмиссии, блок управления 2 приводом, источник питания 3, блок сигнализации 4, со вторым источником питания 5, датчик 6 положения железнодорожного состава, датчики 7, 8 положения подвижного закрепляющего модуля 9, ограничители 10, 11 закрепляющего модуля, при этом блок управления 2 приводом 1 включает размыкающий ключевой элемент 12, на вход которого подключен первый источник питания 3, а на выход - первый контактный замыкающий элемент 13 датчика 6 положения железнодорожного состава, выход которого подключен к двум параллельным ветвям, каждая из которых включает последовательно соединенные: ключ 14 выбора режимов управления приводом с парой переключающих контактных элементов, двух параллельно соединенных ключевых элементов 15,16, замыкающий контактный элемент пускателя 24 и размыкающий контактный элемент 22 второго пускателя 25, первый пускатель 24 (катушка) и один из размыкающих контактных элементов 26 датчика 8 положения подвижного закрепляющего модуля 9, выход которого подсоединен к другому выходу первого источника питания 3, причем силовые контактные элементы 28 одного и второго 29 пускателей 25, 25 соединены параллельно и подсоединены на вход привода (двигателя), а другие контактные элементы 29, 30, 31, 32 датчика 6 положения железнодорожного состава, датчиков 7, 8 положения подвижного закрепляющего модуля 9 и ключей 14, 15, выбора режимов управления приводом соединены параллельно и подсоединены входами к одному из выходов второго источника питания 5, а выходами - к сигнальным элементам 33, 34, 35, 36, выходы которых соединены параллельно и подсоединены ко второму выходу второго источника питания 5. Кроме того, датчик 6 положения железнодорожного состава выполнен в виде магнитоупругого преобразователя, магнитоупругий элемент 37 которого размещен, например, под подошвой рельса 38. Датчики 3, 8 положения подвижного состава закрепляющего модуля 9 выполнены в виде концевых выключателей и размещены по обе стороны подвижного закрепляющего модуля с возможностью взаимодействия с ограничителями 10, 11 его хода. Автоматизированное устройство для закрепления подвижного железнодорожного состава работает следующим образом. При точной остановке состава у специального сигнала колесо его первого вагона находится в зоне действия подвижного закрепляющего модуля 9, размещенного в колее между рельсами. Вес вагона посредством рельса 38 и упругого рычага 39 воздействует на магнитоупругий элемент 7 датчика 6 положения железнодорожного состава. При этом магнитоупругий элемент 7 упруго деформируется и на его выходе появляется электрический сигнал, пропорциональный весу вагона, который усиливается магнитоупругим преобразователем 6, он срабатывает и замыкает свои контактные элементы 13 и 30 в блоке управления 2 приводом 1 и в блоке сигнализации 4. Срабатывание магнитоупругого преобразователя 7 настраивается опытным путем на вес порожнего железнодорожного вагона. При замыкании контактного элемента 30 срабатывает сигнальный элемент 34, например, загорается лампочка "Наличие состава" в блоке сигнализации 4 под действием приложенного напряжения второго источника питания 5. Посредством ключа 14 (15) выбора режимов управления устанавливается требуемый режим управления приводом 1, дистанционный ("Дист") или с местного пульта управления ("Мест"), При установке, например, дистанционного режима управления замыкается один из его контактных элементов в одной параллельной ветви. В исходном положении подвижного закрепляющего модуля 9, например, состав раскреплен, его ограничитель 10 взаимодействует с датчиком 7 положения подвижного закрепляющего модуля, а ограничитель 11 не взаимодействует с датчиком 8. При этом контактные элементы датчиков 7 и 8 выполненных в виде концевых выключателей находятся в следующих состояниях: 31 - замкнут и горит сигнальная лампочка 35 ("состав раскреплен"), 32 разомкнут (лампочка не светится), 26 - замкнут, а 27 - разомкнут. Таким образом, подготовлена к работе первая из параллельных ветвей блока управления приводом, например, для закрепления состава в дистанционном режиме управления. Для закрепления состава включают ключевой элемент 16 в одной из параллельных ветвей блока 2 управления приводом. При этом электрический ток от первого выхода источника питания 3 протекает через замкнутые контактные элементы 12, 13, 14, 16, 22, первый пускатель (катушку) 24, контактный элемент 26 и на второй выход источника питания 3. При протекании тока пускатель 24 срабатывает, замыкает свой контактный элемент 18, блокирует ключевые элементы 16, 17 и пропускает через себя рабочий ток ветви при отключении ключевого элемента 16. Кроме того, при срабатывании пускателя 24 размыкается его контактный элемент 23 во второй параллельной ветви блока управления и разрывается вторая параллельная ветвь блока управления. Это исключает вероятность ошибочного одновременного включения привода на раскрепление состава. При срабатывании пускателя 24, замыкаются его параллельно соединенные силовые контактные элементы 28 во входной цепи привода и на него поступает питание заданной полярности, под действием которого привод, например, моторредуктор переменного тока приводит во вращение в требуемом направлении. Посредством элементов трансмиссии от двигателя подвижный закрепляющий модуль 9 перемещается поступательно вперед по направлению стрелки и закрепляющие шины посредством рычагов поднимаются вверх и расходятся от оси колеи по направлению рельс и колес вагона до упора в них изнутри с заданным усилием. При этом в конце пути перемещения подвижного закрепляющего модуля 9 ограничитель 11 взаимодействует с датчиком 8 подвижного закрепляющего модуля, выполненного, например, в виде концевого выключателя, его контактные элементы переключаются, а именно: контактный элемент 26 размыкается, а контактный элемент 32 замыкается. При размыкании контакта 26 разрывается цепь одной из параллельных ветвей, пускатель 24 обесточивается и отключается, размыкает свои силовые контактные элементы 28 на входе привода 1, он обесточивается и автоматически останавливается. Состав оказывается закрепленным посредством шин закрепляющего модуля. Замыкание контактного элемента 32 в цепи сигнализации обеспечивает поступление питания от источника 6 на сигнальный элемент 36, например, лампочку, которая начинает светиться и сигнализирует о закрепленном состоянии состава ("закрепл"). Одновременно с этим освобождается от воздействия ограничителя хода 10 датчик 7 подвижного закрепляющего модуля и его контактные элементы переключаются, а именно; замыкается контактный элемент 27 второй параллельный ветви блока управления 2 приводом и размыкается контактный элемент 31 в блоке сигнализации 4. Сигнальная лампочка 31 обесточивается и гаснет. На этом процесс закрепления состава заканчивается, он удерживается от самоухода сколь угодно долго без наложения на рельс под колеса вагонов ручных тормозных башмаков. Работа устройства при раскреплении состава. Для раскрепления состава включает ключевой элемент 19 во второй параллельной ветви блока 2 управления приводом. При этом от первого выхода источника питания 3 по цепи подается питание на пускатель 25 посредством замкнутых контактных элементов 12, 13, 15, 19, 23 и 27 и он срабатывает. При срабатывании пускателя 25 размыкается его контактный элемент 22 в первой параллельной ветви блока управления 2, за счет чего предотвращается одновременное включение устройства на закреплении состава. Кроме того замыкается контактный элемент 21 пускателя 25 и шунтирует ключевой элемент 19, который можно отключит и цепь питания сохраняется. Замыкаются также силовые параллельно соединенные контактные элементы 29 пускателя, включенные в цепь питания привода 1 и на него поступает питание заданной полярности, под действием которого он начинает вращаться в направлении, противоположном по отношению к режиму закрепления состава. Посредством элементов трансмиссии закрепляющий модуль 9 начинает перемещаться назад в сторону, противоположную режиму закрепления состава против стрелки. Закрепляющие шины посредством рычагов опускаются вниз и сходятся во внутрь к оси железнодорожного пути. Колесо вагона в составе освобождается от закрепляющего усилия. В крайнем (заднем) положении закрепляющего модуля 9 его ограничитель хода 11 освобождает от воздействия датчик 8 положения закрепляющего модуля 9. При этом его контактные элементы переключаются, элемент 26 замыкается в первой параллельной ветви блока управления приводом, а элемент 31 замыкается в блоке сигнализации 4 и через него подается питание от источника 5 на сигнальную лампочку 35, которая загорается и сигнализирует раскрепленное состояние состава "раскрепл". Кроме того в раскрепленном положении закрепляющего модуля ограничитель 10 вступает во взаимодействие с датчиком 7 положения закрепляющего модуля, в результате чего его контактные элементы переключаются: элемент 27 размыкается во второй параллельной ветви блока управления приводом, а элемент 32 размыкается в блоке сигнализации, сигнальная лампочка обесточивается 36 гаснет. При размыкании контактного элемента 27 обесточивается пускатель 25 и отключается, в результате чего его контактный элемент 21 во второй параллельной ветви размыкается, а элемент 22 замыкается в первой параллельной ветви. Силовые контакты 29 пускателя 25 при его отключении размыкаются в цепи питания привода t он обеспечивается и отключается автоматически. На этом процесс раскрепления состава заканчивается и он может перемещаться. Для управления приводом 1 в местном режиме переключают ключ 14, 15 выбора режима управления в положение "местное". При этом включаются цепи ключевых элементов 17, 20, а цепи ключевых элементов 16, 19 отключаются, замыкается также контактный элемент 33 в блоке сигнализации 4 и поступает питание от источника питания 5 на сигнальный элемент (лампочку) 37, которая загорается и сигнализируется о местном режиме управления приводом. Пульт местного управления размещают междупутье вблизи закрепляющего модуля устройства и включает в себя, например размыкающий ключевой элемент 12, замыкающие ключевые элементы 17, 20 и сигнальный элемент 37. Местный режим управления используют как резервный вариант, например, при повреждениях пульта дистанционного управления. Работа устройства на закрепление или раскрепление состава в режиме местного управления. Отличием является лишь то, что на закрепление состава в местном режиме включают ключевой элемент 17, а на раскрепление ключевой элемент 20. Экстренное или заранее необходимое отключение привода в процессе работы в режиме закрепления или раскрепления состава осуществляется размыканием ключевого элемента 12. При этом разрывается цепь источника питания 3, обесточивается пускатель 24 или 25, который отключается, размыкаются его параллельно соединенные силовые контакты 28 или 29, в цепи питания привода 1 и он останавливается. Процесс закрепления или раскрепления прекращается. Для аварийного раскрепления состава предусмотрен ручной привод (на схеме не показан), который механически соединен с основным приводом, например посредством зубчатой передачи и снабжен рукояткой для его вращения вручную. Согласно полученных результатов по апробированию в промышленных условиях на действующей железной дороге заявляемое изобретение рекомендуется к использованию на сети дорог, так как изобретение обладает следующими преимуществами. На основании сравнительных данных в заявляемом изобретении повышена надежность, упрощена конструкция привода, который выполнен в виде компактного мотор-редуктора и размещен на дополнительной раме внутри колеи не загромождает междупутье (в прототипе привод размещается за пределами колеи). В приводе использован наиболее простой и надежный на сегодняшнее время асинхронный короткозамкнутый электродвигатель переменного тока без щеточно-коллекторной системы, наиболее часто выходящей со строя у прототипа. Это позволяет повысить надежность, снизить металлоемкость, уменьшить габариты и стоимость автоматизированного устройства примерно на 20%. Выполнение датчика положения состава на базе бесконтактного магнитоупругого элемента, размещенного под рельсом, исключающего непосредственный контакт с колесом вагона и сложную рычажно-пружинную систему возврата датчика в исходное положение повысило надежность работы устройства и долговечность элементов и также упростило конструкцию и уменьшило габариты. Выполнение датчика положения закрепляющего подвижного модуля в виде двух концевых выключателей, размещенных по обоим его концам с возможностью взаимодействия с ограничителями хода позволило исключить сложную шестеренчато-рычажную систему, часто выходящую со строя, повысило надежность работы блока; уменьшило габариты и стоимость. Выполнение блока управления приводом, выполненного в виде двух параллельных электрических цепей в каждую из которых содержит последовательно соединенные пускатель и контактные элементы второго пускателя датчика положения подвижного закрепляющего модуля, датчика положения железнодорожного состава, один из контактных элементов ключа выбора режимов управления, два параллельно соединенных замыкающих ключевых элемента, сблокированных замыкающим контактным элементом пускателя и размыкающий контактный элемент, позволило значительно упростить электрическую схему, исключить из нее малонадежные механические контактные элементы и множество промежуточных реле - кодовое, путевое, реверсивное, поляризованное, маятниковое, разрешения, вспомогательное и малонадежными контактными элементами и за счет этого повысить надежность работы устройства. Выполнение блока сигнализации, на входы которого параллельно подключены одни из замыкающих контактных элементов ключа выбора режимов управления приводом, датчика положения железнодорожного состава и датчиков положения подвижного закрепляющего модуля, параллельно подсоединенных к источнику питания, позволило упростить электрическую схему, повысить ее надежность, за счет использования однородных электрических элементов и снизить стоимость. Заявляемое изобретение представляет практический интерес для железнодорожного транспорта, так как позволяет механизировать и автоматизировать процесс закрепления составов, исключить ручной труд работников, а повышение надежности позволяет повысить безопасность на железной дороге. Заявляемое изобретение не оказывает отрицательного воздействия на состояние окружающей среды.
ДивитисяДодаткова інформація
Назва патенту англійськоюAutomated device for fixing rolling stock
Автори англійськоюIonchykov Anatolii Mykolaiovych, Bezverkhii Vitalii Hryhorovych, Litvintsev Mykola Oleksiovych, Shevchenko Viktor Mykhailovych, Potapov Ihor Ilich, Novikov Hryhorii Ivanovych, Kaplun Mykola Dmytrovych
Назва патенту російськоюАвтоматизированное устройство для закрепления подвижного состава железнодорожного транспорта
Автори російськоюИончиков Анатолий Николаевич, Безверхий Виталий Григорьевич, Литвинцев Николай Алексеевич, Шевченко Виктор Михайлович, Потапов Игорь Ильич, Новиков Григорий Иванович, Каплун Николай Дмитриевич
МПК / Мітки
МПК: B61K 7/00
Мітки: автоматизований, закріплення, рухомого, складу, транспорту, пристрій, залізничного
Код посилання
<a href="https://ua.patents.su/5-14982-avtomatizovanijj-pristrijj-dlya-zakriplennya-rukhomogo-skladu-zaliznichnogo-transportu.html" target="_blank" rel="follow" title="База патентів України">Автоматизований пристрій для закріплення рухомого складу залізничного транспорту</a>
Переносний пристрій для закріплення рухомого складу на залізничних коліях
Номер патенту: 3075
Опубліковано: 26.12.1994
Автори: Шумейко Василь Андрійович, Чеботарьов Григорій Аврамович
МПК: B61K 7/00
Мітки: коліях, пристрій, рухомого, залізничних, складу, переносний, закріплення
Формула / Реферат:
Переносное устройство для закрепления состава на железнодорожных путях, содержащее установленный на рельсы колесный упор, несущий рычаги для охвата одними концами головку рельса, винт, резьбовым соединением связанный с другим концом одного из рычагов, и механизм поджатия указанных одних концов рычагов к рельсу, включающий в себя штангу для взаимодействия с колесом вагона, отличающееся тем, что рычаги шарнирно закреплены средней частью на...
Додаткова сходинка для залізничного рухомого складу
Номер патенту: 1856
Опубліковано: 20.12.1994
Автор: Курт Кауер
МПК: B61D 23/00
Мітки: рухомого, залізничного, додаткова, складу, сходинка
Формула / Реферат:
1. Дополнительная ступенька для железнодорожного подвижного состава, регулируемая по высоте и подвижная в почти горизонтальном положении, содержащая приводной рычажный механизм, связанный с площадкой тамбура, ось поворота которой расположена поперек подвижного состава и через точку поворота приводного элементу механизма связана с приводным валом, на котором закреплены одноплечие рычаги указанного механизма, другие концы которых соединены...
Маневровий пристрій для переміщеня рухомого залізничного потягу
Номер патенту: 11691
Опубліковано: 25.12.1996
Автор: Тартасюк Леонід Володимирович
МПК: B61G 3/00
Мітки: пристрій, маневровий, залізничного, переміщеня, потягу, рухомого
Формула / Реферат:
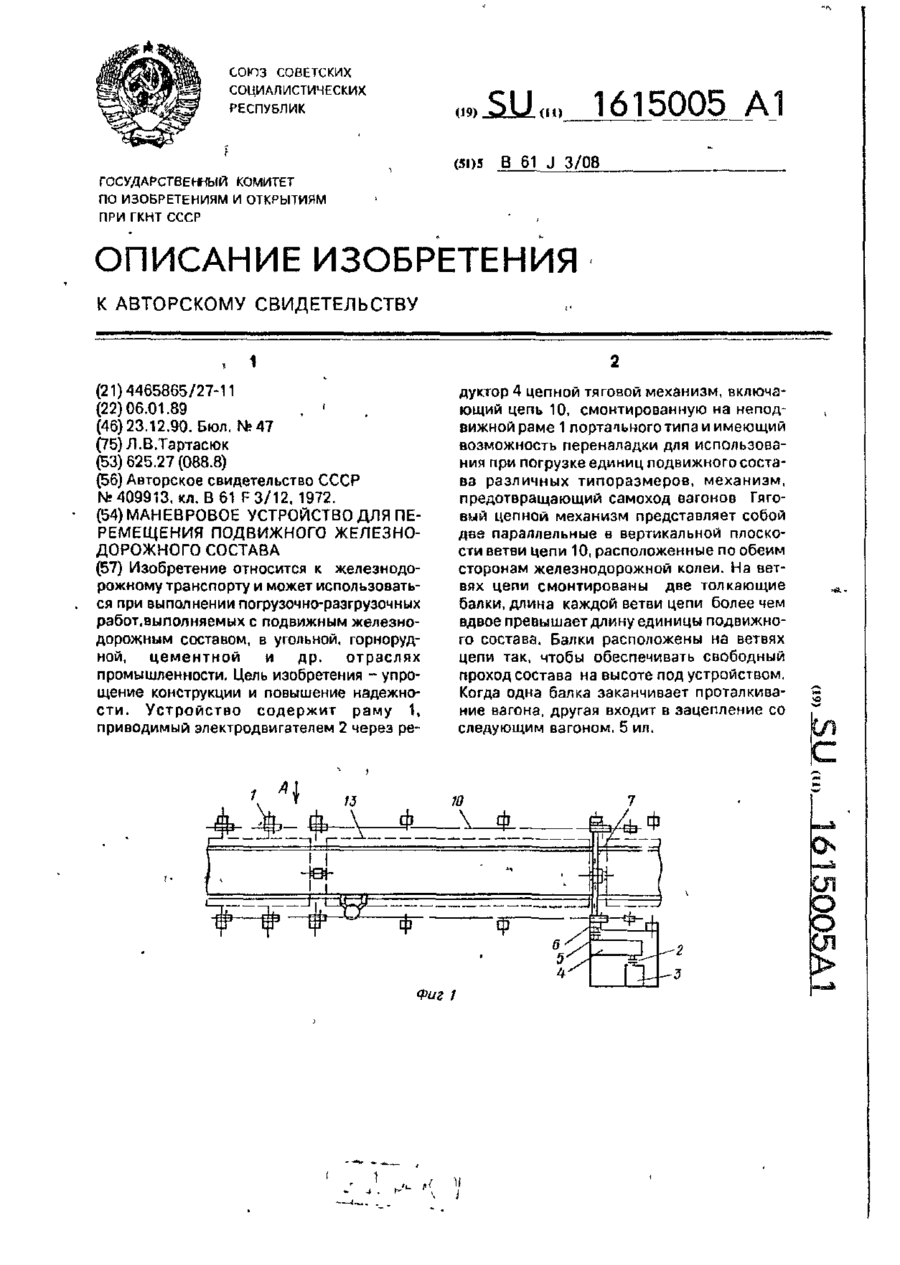
Маневровое устройство для перемещения подвижного железнодорожного состава, содержащее портальную раму, размещенную над железнодорожной колеёй, и приводной тяговый механизм с толкающими балками, отличающееся тем, что, с целью упрощения конструкции и повышения надежности, упомянутый тяговый механизм выполнен в виде двух бесконечных цепей, размещенных па указанной портальной раме в вертикальных плоскостях по обе стороны от железнодорожной...
Гальмова колодка півня-ігнат’єва залізничного рухомого составу
Номер патенту: 6772
Опубліковано: 29.12.1994
Автори: Півень Євгеній Грігорьєвіч, Ігнатьєв Дмітрій Міхайловіч
МПК: B61H 7/00
Мітки: півня-ігнат'єва, залізничного, составу, гальмова, рухомого, колодка
Формула / Реферат:
Тормозная колодка железнодорожного подвижного состава, содержащая металлический каркас с выполненными в нем сквозными отверстиями и закрепленную на каркасе фрикционную неметаллическую массу, проникающую в отверстия каркаса, отличающаяся тем, что металлический каркас выполнен в виде ячеистой пространственной сетки, причем образующие ячеек представляют собой пластины, повернутые под углом к плоскости каркаса.
Пристрій для формування команд керування по шляху переміщення рухомого об’єкта
Номер патенту: 1715
Опубліковано: 25.10.1994
Автор: Клименко Віталій Васильович
МПК: B66B 1/34
Мітки: шляху, рухомого, формування, пристрій, переміщення, команд, об'єкта, керування
Формула / Реферат:
1. Устройство формирования путевых команд управления подвижным объектом, содержащее датчик путевых импульсов, соединенный с реверсивным счетчиком, усилитель, узел программирования, отличающееся тем, что в него введены датчик конечного положения подвижного объекта и, соответственно количеству формируемых команд, блоки формирования путевых команд, каждый из которых содержит реверсивный счетчик, узел программирования и усилитель причем выходы...
Попередній патент: Ротор торцевого асинхронного двигуна
Наступний патент: Hакістhа пластиhа
Випадковий патент: Спосіб бездемонтажного діагностування побутових лічильників природного та зрідженого газу в експлуатації