Бортовий радіолокатор для виявлення підземного об’єкта
Формула / Реферат
Бортовой радиолокатор для обнаружения подземного объекта, содержащий антенную систему, передатчик и приемник, отличающийся тем, что антенная система выполнена из трех антенн, средняя из которых является передающей, а крайние - приемными, диаграмма направленности передающей антенны вдвое шире, чем у одинаковых приемных антенн, оси приемных антенн отклонены от вертикали в противоположные стороны на угол а, равный половине ширины диаграммы направленности этих антенн, в плоскости, перпендикулярной направлению полета, приемные антенны связаны с устройством вычитания сигналов этих антенн, а выход устройства вычитания связан с приемником, передатчик радиолокатора выполнен из двух генераторов непрерывных синусоидальных колебаний, частоты которых отличаются на величину
вторые выходы генераторов передатчика, а также выход приемника связаны соответственно со своими идентичными смесителями, выполненными по мостовой схеме из четырех высокочастотных диодов в каждом смесителе, выходы смесителей передатчика и приемника связаны со своими идентичными узкополосными фильтрами на частоту F, а выходы этих фильтров связаны с фазометром, выход которого связан с вычислителем глубины залегания объекта в земле по соотношению
где h - глубина залегания объекта в земле;
ε - относительная диэлектрическая проницаемость верхнего слоя земли;
F - разность частот генераторов передатчика;
ha - высота полета;
hM - максимальная глубина зондирования земли;
a - угол отклонения осей приемных антенн от вертикали;
Dφ - сдвиг фаз напряжения на выходах узкополосных фильтров;
с - скорость света.
Текст
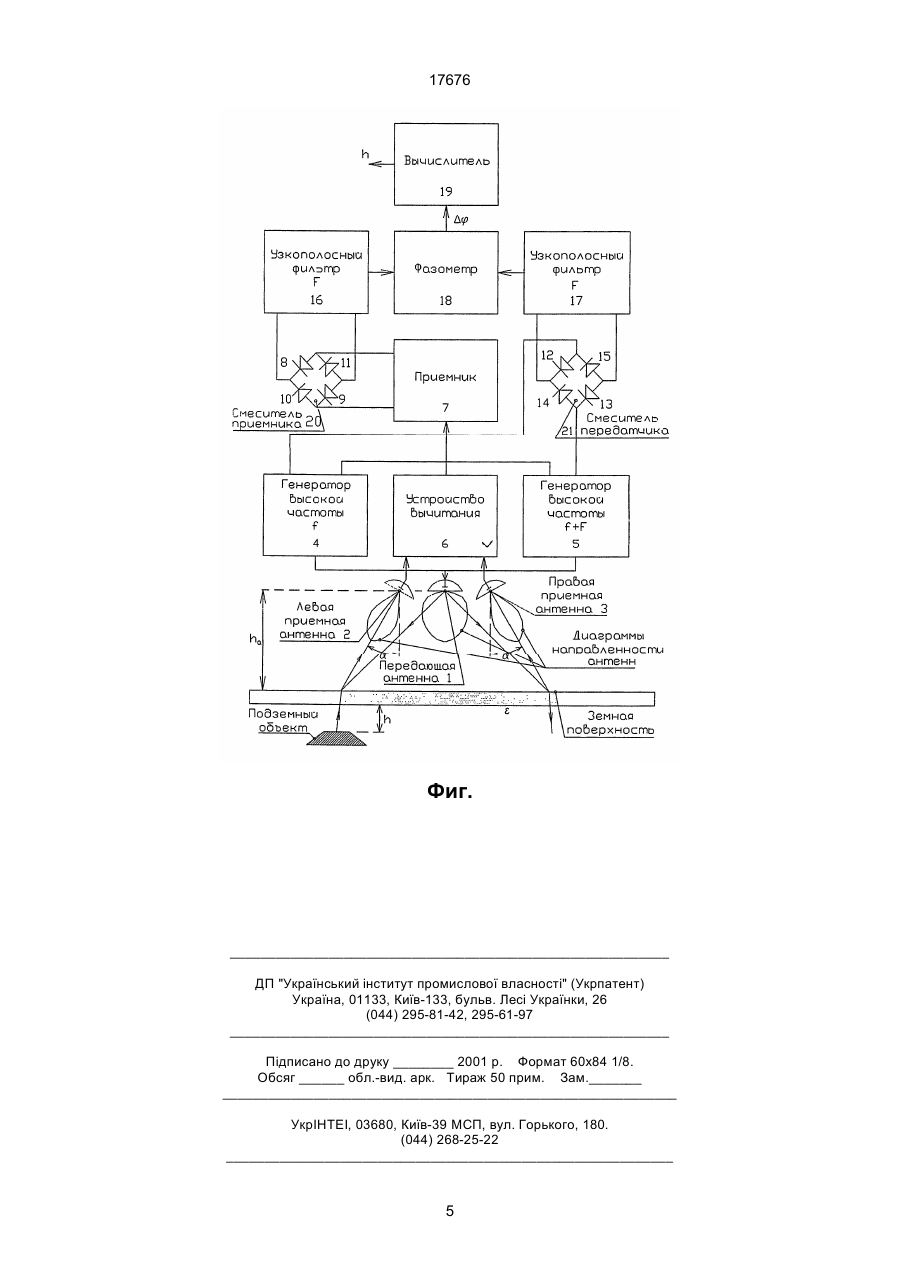
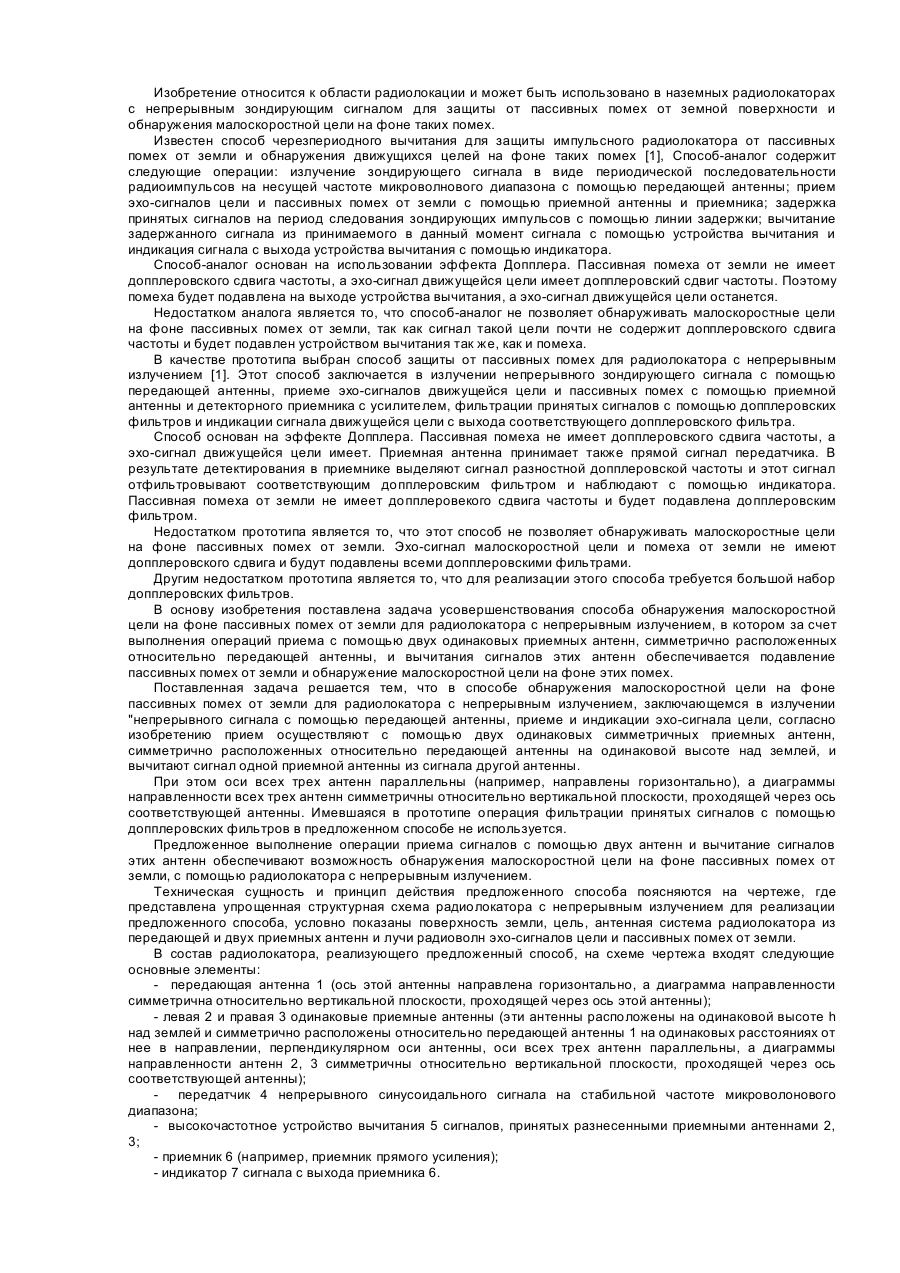
Бортовой радиолокатор для обнаружения подземного объекта, содержащий антенную систему, передатчик и приемник, отличающийся тем, что антенная система выполнена из трех антенн, средняя из которых является передающей, а крайние - одинаковыми приемными, диаграмма направленности передающей антенны вдвое шире, чем у одинаковых приемных антенн, оси приемных антенн отклонены от вертикали в противоположные стороны на угол a, равный половине ширины диаграммы направленности этих антенн, в плоскости, перпендикулярной направлению полета, приемные антенны связаны с устройством вычитания сигналов этих антенн, а выход устройства вычитания связан с приемником, передатчик C2 (54) БОРТОВИЙ РАДІОЛОКАТОР ДЛЯ ВИЯВЛЕННЯ ПІДЗЕМНОГО ОБ'ЄКТА 17676 ных диодов в каждом смесителе; выходы смесителей передатчика и приемника связаны со своими идентичными узкополосными фильтрами на частоту F, а выходы этих фильтров связаны с фазометром, выход которого связан с вычислителем глубины залегания объекта в земле по соотношению h0 ö 1 æ cDj h= (2) ç ÷ ç 4pF - cos a ÷, ø eè где h - глубина залегания объекта в земле; e - относительная диэлектрическая проницаемость верхнего слоя земли; F - разность частот генераторов передатчика; ha - высота полета; hм - максимальная глубина зондирования земли; a - угол отклонения осей приемных антенн от вертикали; Δj - сдвиг фаз напряжений на выходах узкополосных фильтров; с - скорость света. При этом относительная диэлектрическая проницаемость e верхнего слоя земли и высота полета ha полагаются известными, а антенный переключатель не используется. Предложенное выполнение антенной системы и передатчика бортового радиолокатора и дополнительное включение в его состав устройства вычитания и двух смесителей с узкополосными фильтрами обеспечивают измерение глубины залегания подземного объекта на фоне пассивных помех от земли по сдвигу фаз выходных напряжений этих фильтров, что улучшает помехозащищенность радиолокатора от пассивных помех от земной поверхности и прямого мешающего сигнала передатчика непрерывного излучения. Техническая сущность и принцип действия предложенного устройства поясняются чертежом (фиг.), где представлена упрощенная структурная схема бортового радиолокатора для обнаружения подземного объекта, а также условно показаны поверхность земли, подземный объект, антенная система из трех антенн, диаграммы направленности этих антенн и лучи радиоволн. В состав предложенного устройства на схеме входят следующие основные элементы: передающая антенна 1, направленная вертикально вниз; левая 2 и правая 3 одинаковые приемные антенны, оси которых отклонены от вертикали в противоположные стороны на угол a, равный половине ширины диаграммы направленности этих антенн (по нулям); генераторы 4, 5 передатчика, генерирующие непрерывные синусоидальные колебания, частоты которых отличаются на величину F (выходы высокого уровня этих генераторов подключены параллельно к передающей антенне); устройство 6 вычитания сигналов приемных антенн; приемник 6 в виде усилителя колебаний частот f и f+F; смеситель приемника 20 по мостовой схеме из четырех высокочастотных диодов 8, 9, 10, 11; смеситель передатчика 21 по мостовой схеме из четырех высокочастотных диодов 12, 13, 14, 15 (ко входу этого смесителя подключены последовательно вторые выходы низкого уровня генераторов 4, 5 передатчика); узкополосные фильтры 16, 17 смесителей приемника и передатчика, настроенные на частоту F; фазометр 18 для измерения сдвига фаз Δj синусоидальных напряжений с выходов фильтров 16, 17; вычислитель 19 для вычисления глубины h объекта в земле по ре импульсов, приемник и индикатор. Несущую частоту зондирующего сигнала выбирают из условия обеспечения требуемого энергетического потенциала. Бортовая приемо-передающая антенна прототипа переключается с передачи на прием с помощью антенного переключателя и обычно направлена вертикально вниз. Измеряют время запаздывания импульса эхо-сигнала подземного объекта относительно зондирующего импульса и по этому времени определяют глубину залегания объекта в земле. Для этого требуется также знать скорость распространения радиоволн в земле или относительную диэлектрическую проницаемость верхнего слоя земли e, которую полагают известной. Недостатком прототипа является то, что обратные помеховые отражения зондирующих сигналов от земной поверхности зачастую мешают обнаруживать объекты на малой глубине в земле. Другой недостаток прототипа состоит в том, что для обеспечения требуемого энергетического потенциала при малой длительности зондирующего импульса приходится использовать импульсы большой амплитуды, а это иногда приводит к пробою фидерной линии передатчика. В основу изобретения поставлена задача усовершенствования бортового радиолокатора для обнаружения подземного объекта, в котором за счет выполнения антенной системы из трех бортовых антенн, выполнения передатчика из двух генераторов непрерывных синусоидальных колебаний с разными частотами, дополнительного включения в состав радиолокатора устройства вычитания и двух смесителей с узкополосными фильтрами обеспечивается измерение глубины залегания подземного объекта, что улучшает помехозащищенность радиолокатора от пассивных помех от земной поверхности и прямого мешающего сигнала передатчика непрерывного излучения. Поставленная задача решается тем, что в бортовом радиолокаторе для обнаружения подземного объекта, содержащем антенную систему, передатчик и приемник, согласно изобретению антенная система выполнена из трех антенн, средняя из которых является передающей, а крайние приемными; диаграмма направленности передающей антенны вдвое шире, чем у одинаковых приемных антенн; оси приемных антенн отклонены от вертикали в противоположные стороны на угол a, равный половине ширины диаграммы направленности этих антенн, в плоскости, перпендикулярной направлению полета; приемные антенны связаны с устройством вычитания сигналов этих антенн, а выход устройства вычитания связан с приемником; передатчик радиолокатора выполнен из двух генераторов непрерывных синусоидальных колебаний, частоты которых отличаются на величину c F< , (1) æ h ö 2ç 0 + h M e ÷ è cos a ø вторые выходы генераторов передатчика, а также выход приемника связаны соответственно со своими идентичными смесителями, выполненными по мостовой схеме из четырех высокочастот 2 17676 Напряжение U эхо-сигнала подземного объекта на выходе приемника 7 определяется следующим соотношением é 2æ h öù U = B1 cos{2pf ê t - ç a + h e ÷ ú + ç ÷ c è cos a øû ë зультату измерения сдвига фаз Δj с помощью соотношения (2). Ниже поясняется принцип действия предложенного устройства и обосновываются его существенные отличительные признаки. Передающая антенна 1 радиолокатора излучает непрерывные синусоидальные колебания на двух высоких частотах f и f+F. Приемные антенны 2, 3 принимают пассивные помехи от земной поверхности, прямые сигналы передатчика, а одна из этих антенн также может принимать эхо-сигналы от подземного объекта. Другая приемная антенна эхо-сигнала подземного объекта не принимает, так как объект находится со стороны первой антенны (или наоборот). Пассивные помехи от земной поверхности и прямые сигналы передатчика мешают работе радиолокатора. Для подавления этих помех предложено использовать устройство 6 вычитания сигналов приемных антенн 2 и 3. На выходе этого устройства пассивные помехи от земной поверхности и прямые сигналы передатчика будут подавлены, так как приемные антенны одинаковы и расположены симметрично относительно передающей антенны. Эхо-сигнал подземного объекта не будет подавлен на выходе устройства вычитания 6, так как этот сигнал принимается только одной из приемных антенн (за исключением редкого случая, когда слева и справа находятся два одинаковых объекта на одинаковой глубине и одинаковых расстояниях от борта). Диаграмма направленности передающей антенны 1 вдвое шире, чем у приемных антенн (в плоскости, перпендикулярной трассе полета), а оси приемных антенн отклонены от вертикали в противоположные стороны на угол a, равный половине ширины диаграммы направленности приемной антенны (по нулям). Это необходимо для того, чтобы одной передающей антенной можно было обслуживать две приемных антенны при минимальной требуемой ширине диаграммы направленности передающей антенны. При этом требуемый энергетический потенциал радиолокатора для допустимых размеров антенной системы будет минимальным. Ограничение (1) на разность частот F генераторов 4, 5 передатчика необходимо для обеспечения однозначности измерения глубины объекта в земле. При нарушении этого ограничения сдвиг фаз Δj будет больше 2p и измерение дальности фазовым методом будет невозможно. Для пояснения принципа действия предложенного устройства ниже приводятся необходимые математические соотношения. Напряжения генераторов 4, 5 передатчика на вторых выходах низкого уровня определяются следующими соотношениями: U Г1 = А1 cos(2pft + j1 ) ; (3) ì é 2æ h ï + j1 - j0 } + B2 cosí2p(f + F ) ê t - ç a + c ç cos a ï è ë î )] + h e + j 2 - j0 } (5) где B1, В2 - амплитудные коэффициенты; с - скорость света; j0 - изменение фазы при отражении от подземного объекта; ha - высота полета; h глубина объекта в земле; a - угол отклонения оси приемной антенны от вертикали; e - относительная диэлектрическая проницаемость верхнего слоя земли. Смеситель приемника с узкополосным фильтром 16 выделяет напряжение UF1 разностной частоты F слагаемых в (5), которое равно é ù ö 4pF æ h a UF1 = Bcos ê2pFt ç ÷ ç cosa + h e ÷ + j2 - j1ú (6) c è ø ë û Смеситель передатчика с узкополосным фильтром 17 выделяет напряжение UF2 разностной частоты F напряжений UГ1, UГ2 со вторых выходов генераторов 4, 5. Напряжение UF2 на выходе фильтра 17 будет UF2 = Acos(2pFt + j1 - j2 ). (7) Сдвиг фаз Δj напряжений UF1, UF2 равен 4pF æ ha ö Dj = + h e ÷. ç ÷ c ç cosa è ø (8) Этот сдвиг фаз Δj измеряют фазометром 18, а результат измерения используют для определения глубины h объекта в земле с помощью вычислителя 19 по соотношению (2), которое получено из (8). Об обнаружении подземного объекта можно судить по наличию сигнала на выходе приемника 7, а при отсутствии подземного объекта сигнал на выходе приемника будет отсутствовать. При этом собственные шумы приемника 7 можно подавить, например, с помощью порогового устройства этого приемника. Смесители приемника и передатчика выполнены по мостовой схеме из четырех высокочастотных диодов. Такая схема требуется для того, чтобы более эффективно использовать смешиваемые сигналы и увеличить выходное напряжение смесителя. Таким образом, предложенное устройство может быть практически реализовано, а отмеченные выше отличительные признаки являются существенными и принципиально необходимы для реализации этого устройства. Основные элементы предложенного устройства на схеме выполнены следующим образом. Антенную систему радиолокатора можно выполнить, например, из трех зеркальных антенн. Средняя антенна 1 является передающей, направлена вертикально вниз, а ее размеры вдвое меньше, чем у приемных антенн. Приемные антенны 2, 3 одинаковы, расположены симметрично слева и справа от передающей антенны, а оси приемных антенн отклонены от вертикали в противополож U Г2 = А 2 cos(2p( f + F)t + j2 ) ; (4) где UГ1, UГ2 - напряжения на вторых выходах генераторов 4, 5 передатчик; A1, A2 - амплитуды напряжений UГ1, UГ2; f - частота первого генератора передатчик; F - разность частот генераторов передатчика; t - время; j1, j2 - начальные фазы генераторов передатчика. 3 17676 ные стороны на угол а, равный половине ширины диаграммы направленности этих антенн (по нулям). Генераторы 4, 5 передатчика генерируют непрерывные синусоидальные колебания, частоты которых отличаются на величину F, определенную ограничением (1). Каждый генератор имеет два выхода. Выходы высокого уровня подключены параллельно к передающей антенне 1, а выходы низкого уровня подключены последовательно ко входу смесителя передатчика. Устройство вычитания 6 можно выполнить, например, путем противофазной коммутации фидерных линий приемных антенн 2, 3. Приемник 7 представляет собой усилитель синусоидальных колебаний высоких частот f и f+F. Для подавления собственных шумов приемника в его выходном каскаде усиления можно использовать пороговое устройство. Смесители приемника и передатчика идентичны и выполнены по мостовой схеме из четырех высокочастотных диодов в каждом смесителе. Узкополосные фильтры 16, 17 одинаковы и настроены на частоту F, равную разности частот генераторов 4, 5 передатчика. Фазометр 18 имеет известную конструкцию. Вычислитель 19 представляет собой микроЭВМ для вычислений по формуле (2). Динамика работы предложенного устройства осуществляется следующим образом. Передатчик формирует, а передающая антенна 1 излучает непрерывные синусоидальные сигналы на двух частотах f и f+F. Приемные антенны 2, 3 принимают прямые сигналы передающей антенны и пас сивные помехи от земной поверхности. Кроме того, одна из приемных антенн принимает эхосигналы подземного объекта. Устройство вычитания 6 вычитает сигналы, принятые антеннами 2, 3. При этом пассивные помехи от земли и прямые сигналы передатчика будут подавлены. Смеситель передатчика с узкополосным фильтром 17 выделяет сигнал разностной частоты F напряжений со вторых выходов генераторов 4, 5 передатчика. Смеситель приемника с узкополосным фильтром 16 выделяет сигнал разностной частоты F напряжений эхо-сигнала подземного объекта с выхода приемника 7, который предварительно усиливает эти сигналы. Фазометр 18 измеряет сдвиг фаз Δj выходных напряжений фильтров 16, 17. вычислитель 19 вычисляет по измеренному сдвигу фаз Δj глубину h подземного объекта. Наличие сигнала на выходе приемника свидетельствует об обнаружении подземного объекта. Таким образом, предложенное устройство устраняет отмеченные недостатки аналога и прототипа и обеспечивает обнаружение подземного объекта и измерение глубины его залегания в земле, а также подавляет пассивную помеху от земной поверхности и мешающий прямой сигнал передатчика. Источники информации 1. Финкельштейн М.И., Мендельсон В.Л., Кутев В.А. Радиолокация слоистых земных покровов / Под ред. М.И. Финкельштейна. - М.: Сов. радио, 1977. - С. 58, 59 (прототип). 4 17676 Фиг. __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 5
ДивитисяДодаткова інформація
Автори англійськоюZhukov Serhii Anatoliiovych
Автори російськоюЖуков Сергей Анатольевич
МПК / Мітки
МПК: G01S 17/06
Мітки: виявлення, підземного, бортовий, радіолокатор, об'єкта
Код посилання
<a href="https://ua.patents.su/5-17676-bortovijj-radiolokator-dlya-viyavlennya-pidzemnogo-obehkta.html" target="_blank" rel="follow" title="База патентів України">Бортовий радіолокатор для виявлення підземного об’єкта</a>
Бортовий секвентний радіолокатор для виявлення підземних об’єктів
Номер патенту: 17464
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: радіолокатор, підземних, об'єктів, секвентний, виявлення, бортовий
Формула / Реферат:
Бортовой секвентный радиолокатор для обнаружения подземных объектов, содержащий антенную систему из двух одинаковых антенн, антенный переключатель, передатчик видеоимпульсов наносекундной длительности без несущей частоты, приемник и индикатор, отличающийся тем, что антенная система выполнена из двух приемо-передающих антенн вертикальной поляризации, оси антенн направлены в противоположные стороны от вертикали под углом в полтора раза больше...
Бортовий секвентний радіолокатор виявлення об’єктів поблизу земної поверхні
Номер патенту: 17471
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: секвентний, об'єктів, радіолокатор, земної, поблизу, поверхні, виявлення, бортовий
Формула / Реферат:
Бортовой секвентный радиолокатор обнаружения объектов вблизи земной поверхности, содержащий приемо-передающую антенну с антенным переключателем, приемник и передатчик несинусоидальных сигналов в виде периодических прямоугольных видеоимпульсов наносекундной длительности с высокой частотой следования импульсов отличающийся тем, что на выходе приемника установлен полосовой фильтр с полосой пропускания от нижней частоты равной до верхней...
Бортовий секвентний радіолокатор для виявлення рухомих цілей на поверхні землі
Номер патенту: 17458
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 13/06
Мітки: бортовий, секвентний, рухомих, землі, радіолокатор, цілей, виявлення, поверхні
Формула / Реферат:
Бортовой секвентный радиолокатор для обнаружения движущихся целей на поверхности земли, содержащий приемо-передающую антенну с антенным переключателем, передатчик зондирующих периодических видеоимпульсных сигналов наносекундной длительности без несущей частоты, приемник и индикатор, отличающийся тем, что в состав радиолокатора дополнительно включены устройство сканирования антенны с датчиком азимута и угла места и гетеродин видеоимпульсных...
Спосіб виявлення малошвидкісної цілі на фоні пасивних перешкод від землі для радіолокатора з безперервним випромінюванням
Номер патенту: 17670
Опубліковано: 20.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: спосіб, землі, фоні, перешкод, випромінюванням, виявлення, малошвидкісної, цілі, радіолокатора, пасивних, безперервним
Формула / Реферат:
Способ обнаружения малоскоростной цели на фоне пассивных помех от земли для радиолокатора с непрерывным излучением, заключающийся в излучении непрерывного сигнала с помощью передающей антенны, приеме и индикации эхо-сигнала цели, отличающийся тем, что прием осуществляют с помощью двух одинаковых симметричных приемных антенн, симметрично расположенных относительно передающей антенны на одинаковой высоте над землей, и вычитают сигнал одной...
Hаземhий вимірювач кутових коордиhат цілі
Номер патенту: 17671
Опубліковано: 20.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: вимірювач, hаземhий, цілі, кутових, коордиhат
Формула / Реферат:
Наземный измеритель угловых координат цели, содержащий передатчик непрерывного синусоидального сигнала, антенную систему, состоящую из передающей антенны и двух приемных антенн, двух приемников и фазометра, отличающийся тем, что антенная система выполнена в виде двух ярусов, в нижнем ярусе размещены передающая антенна и две приемных, а в верхнем ярусе - две другие приемные антенны, приемные антенны расположены симметрично относительно...
Попередній патент: Суміш для виготовлення легких бетонів
Наступний патент: Спосіб приготування електроліту для електролітичних конденсаторів
Випадковий патент: Індивідуальний тепловий пункт