Спосіб керування тепловим режимом електролізера для одержання алюмінію
Номер патенту: 19796
Опубліковано: 25.12.1997
Автори: Казаков Дмітрій Романовіч, Самоловов Сєргєй Алєксандровіч, Локшин Робєрт Гіршевіч, Бєрх Вєніамін Ісааковіч, Майєр Алєксандр Давідовіч, Нікулін Віктор Ніколаєвіч, Шупацкій Гєннадій Матвєєвіч, Фітерман Михаіл Яковлєвіч
Формула / Реферат
![]() Способ управления тепловым режимом электролизера для получения алюминия, включающий измерение напряжения на электролизере и тока через него, определение сопротивления электролизера и его стабилизацию вертикальными перемещениями анода пропорционально отклонению сопротивления от заданной области значений сопротивления, отличающийся тем, что после каждого перемещения анода уменьшают величину заданной области значений сопротивления обратно пропорционально времени, прошедшему от момента перемещения анода, путем уменьшения величины ее верхней границы и увеличения величины нижней границы, определяют среднее отклонение сопротивления от заданного значения за это время и при выходе его за заданную область значений сопротивления перемещают анод пропорционально среднему отклонению сопротивления.
Способ управления тепловым режимом электролизера для получения алюминия, включающий измерение напряжения на электролизере и тока через него, определение сопротивления электролизера и его стабилизацию вертикальными перемещениями анода пропорционально отклонению сопротивления от заданной области значений сопротивления, отличающийся тем, что после каждого перемещения анода уменьшают величину заданной области значений сопротивления обратно пропорционально времени, прошедшему от момента перемещения анода, путем уменьшения величины ее верхней границы и увеличения величины нижней границы, определяют среднее отклонение сопротивления от заданного значения за это время и при выходе его за заданную область значений сопротивления перемещают анод пропорционально среднему отклонению сопротивления.
Текст
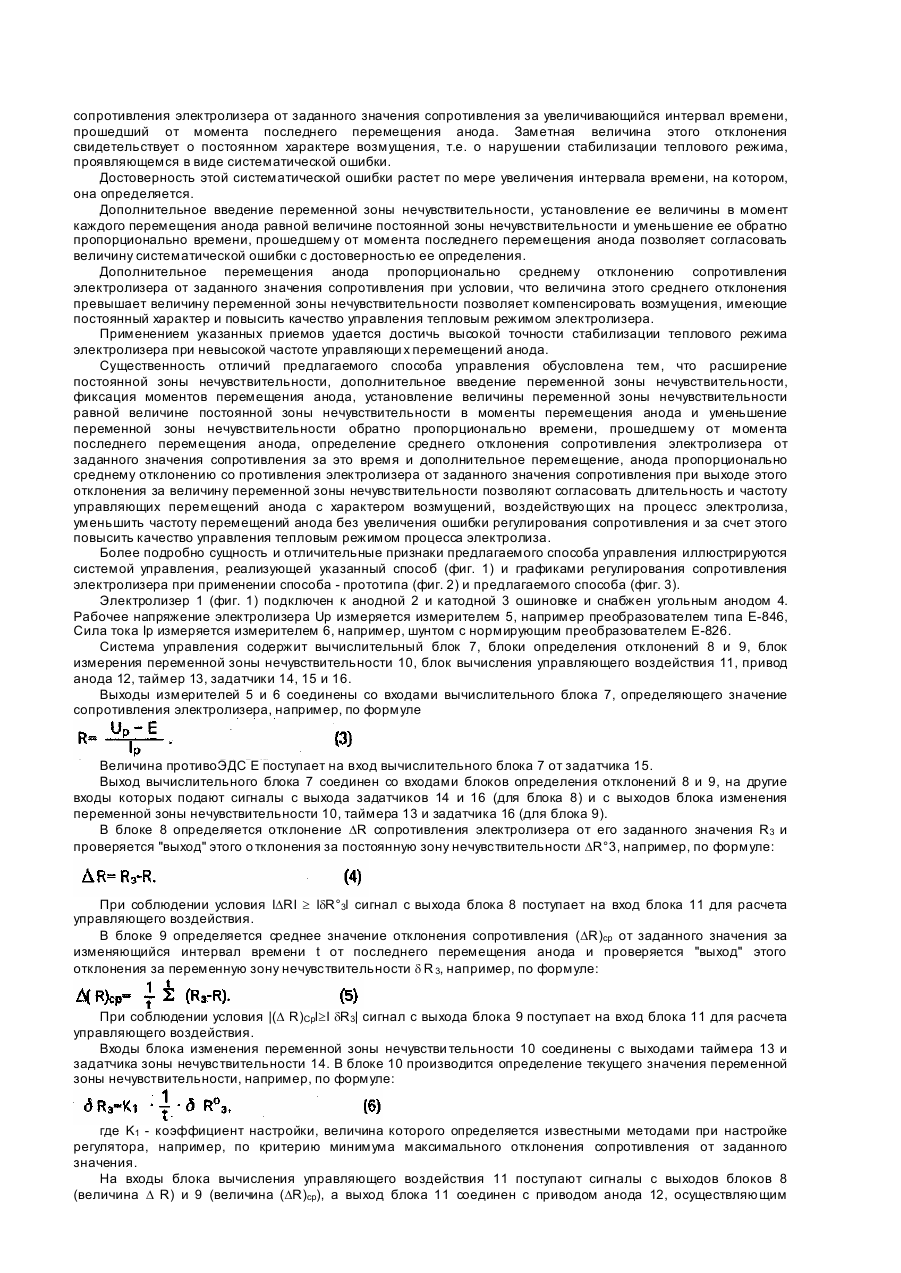
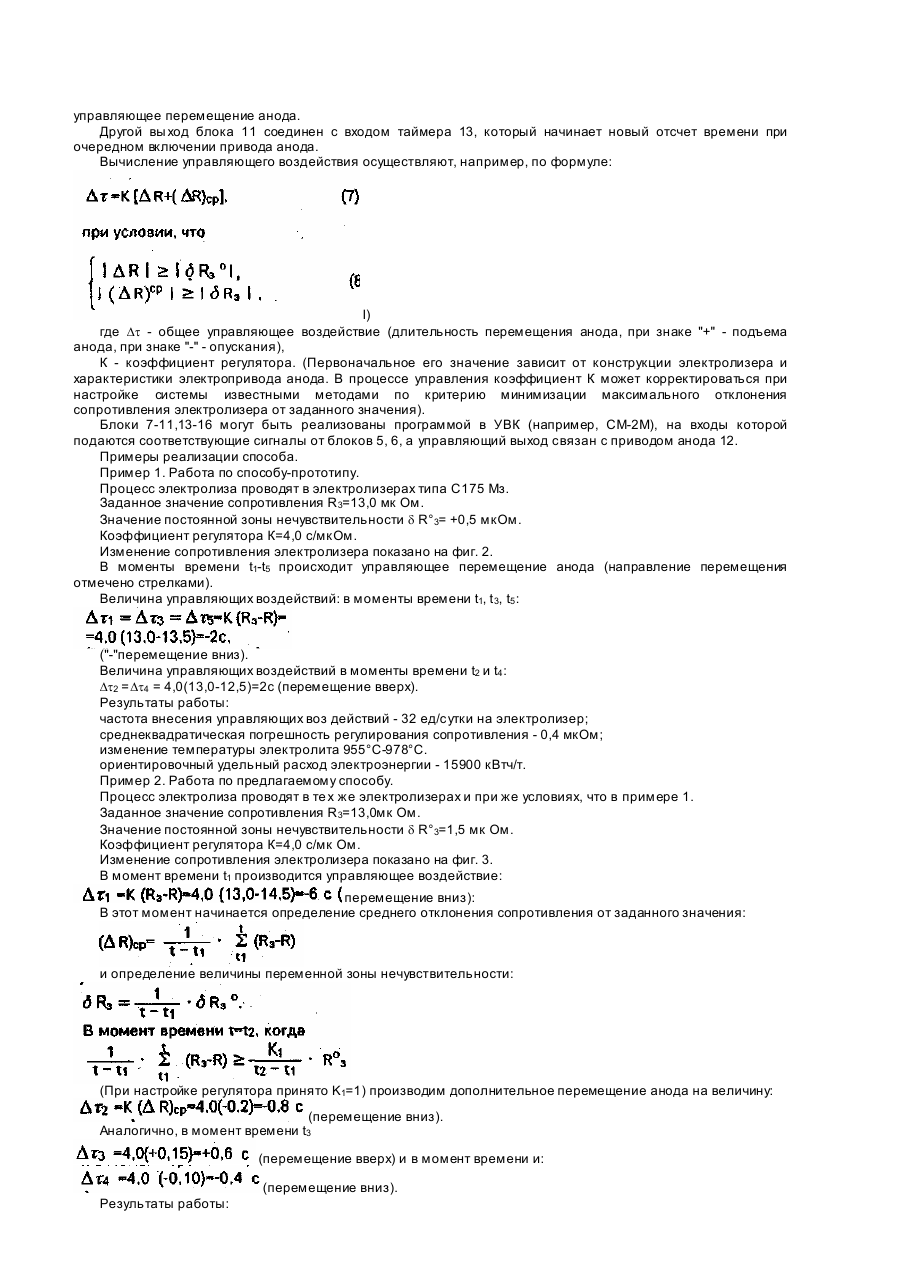
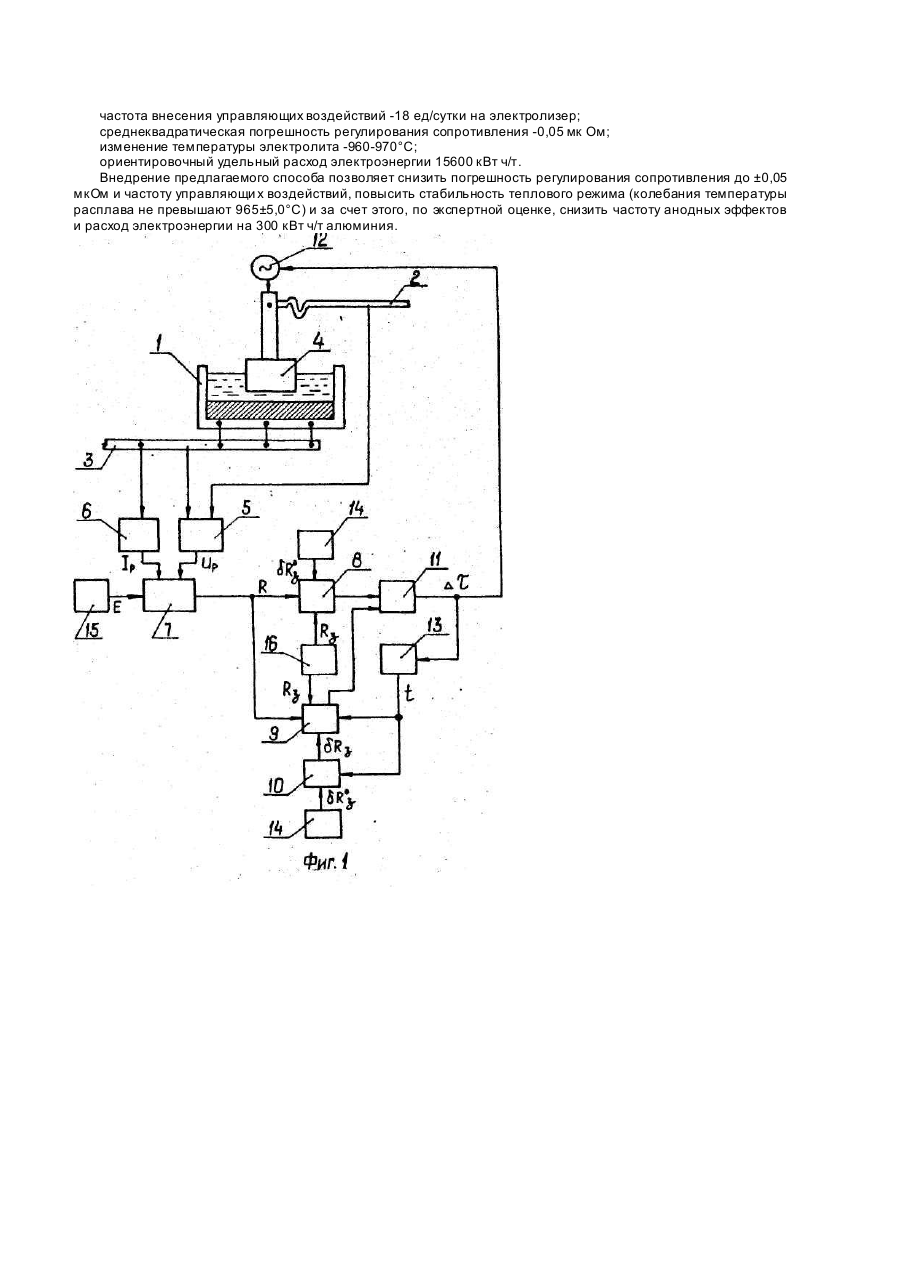
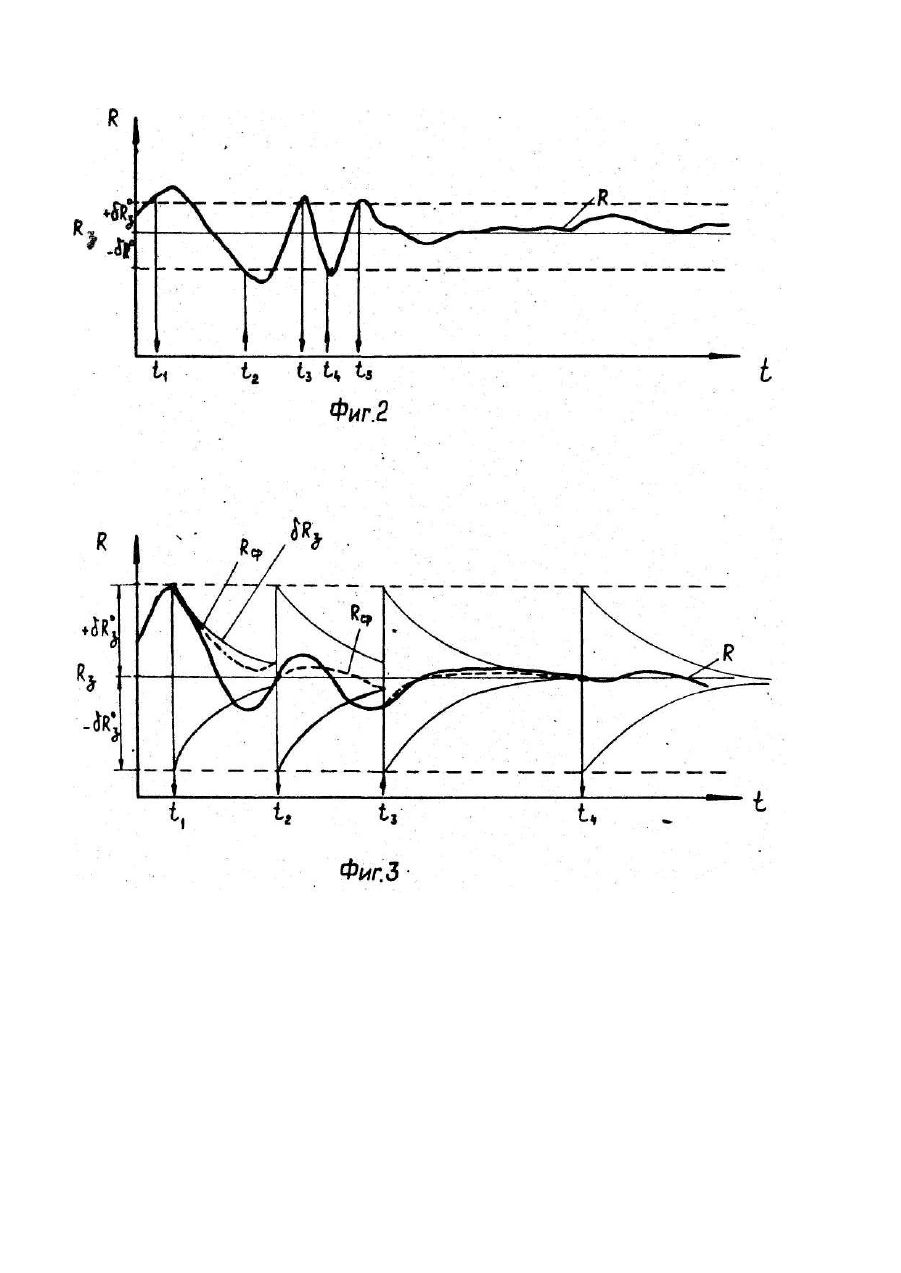
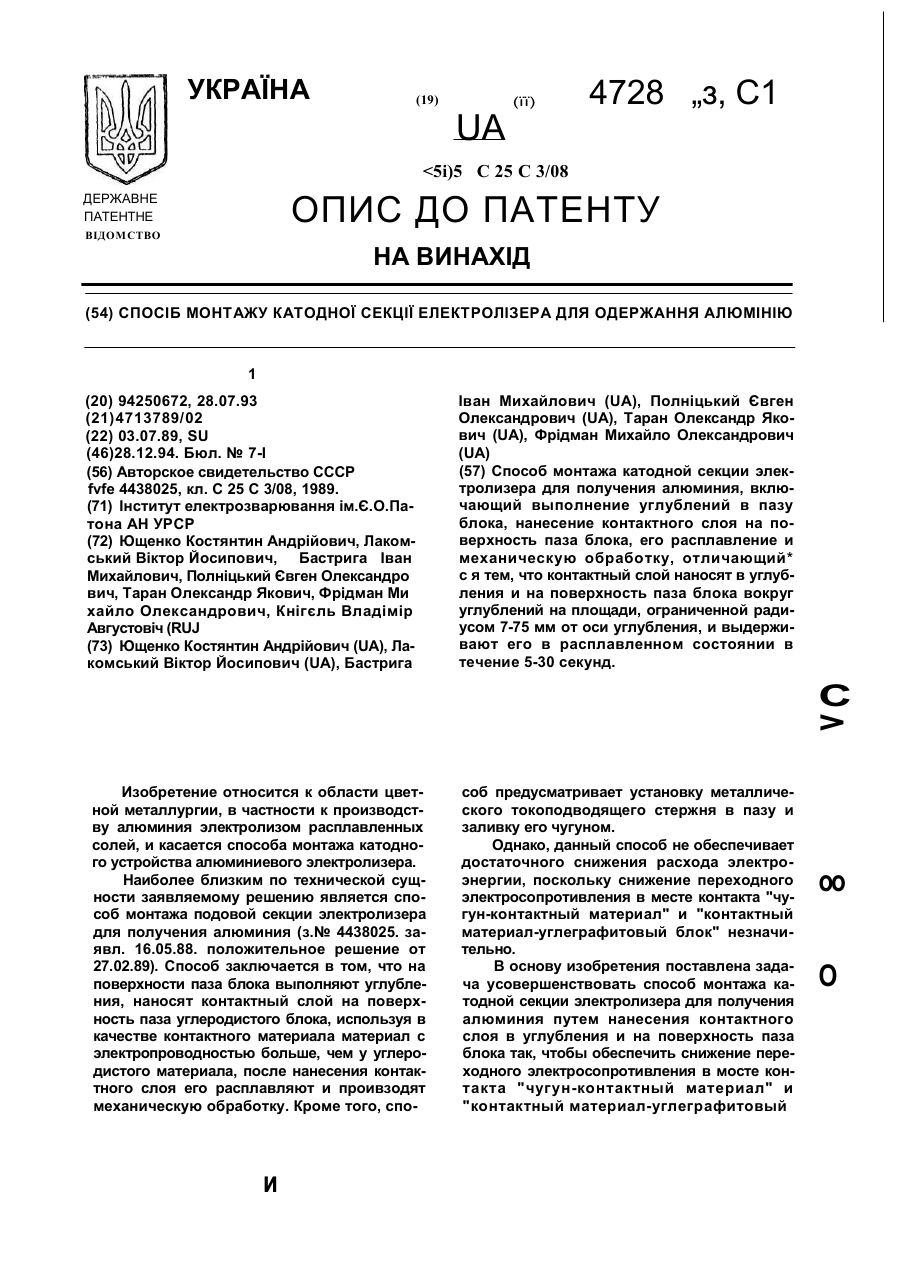
Настоящее изобретение относится к области цветной металлургии и может быть использовано при управлении работой электролизеров для получения алюминия. При управлении процессом электролиза алюминия одним из важных условий оптимизации режима является стабилизация теплового режима процесса на заданном оптимальном уровне. Известны методы стабилизации теплового режима электролизера, которые заключаются в измерении температуры электролита и ее стабилизации изменением величины междуполюсного расстояния [Авт.св. СССР №1041607, №831870]. Недостатком этих методов является низкое качество стабилизации теплового режима вследствие отсутствия приборов для непрерывного измерения температуры расплава с требуемой точностью. Известен способ регулирования теплового режима электролизера заключающийся в измерении тока и напряжения электролизера, определении количества поданной в электролизер электроэнергии и ее стабилизации изменением положения анода [Патент ФРГ №2335028 от 10.07.73].. Недостатком способа является низкое качество стабилизации теплового режима вследствие того, что не учитываются возмущения (изменение формы рабочего пространства, условия охлаждения и пр.). Известны методы стабилизации теплового режима, заключающиеся в стабилизации на заданном уровне рабочего [Патент США №3485727 от 23.12.69], "приведенного" (Патент Японии №43-8332 от 30.03.68, авт.св. СССР №1094405] напряжения электролизера или его электрического сопротивления [Авт.св. №749940, 801642, 840203, 836229, 982380, патент Великобритании №1413727 от 16.07.73]. При этом "приведенное" напряжение (Uпр) определяют как где U - измеренное значение напряжения электролизера; I - измеренное значение тока серии;. Iн - номинальное значение тока серии; Ек - величина обратной ЭДС (обычно принимается равной постоянному значению). В соответствии с известными способами определяют отклонение регулируемого параметра от его заданного значения и при возникновении отклонения производят пропорциональное перемещение анодного массива в вертикальном направлении. Недостатком известных способов является частое включение приводов анода, обусловленное резкими изменениями напряжения электролизера и тока серии, особенно при возникновении анодных эффектов на электролизерах серии, Для снижения частоты включения приводов анода при условии резких изменений тока и напряжения на практике используется метод стабилизации сопротивления с использованием зоны нечувстви тельности. Такой метод применяется, например, в способе каскадной автоматической регулировки печи для электролиза алюминия [Патент Японии, по заявке №75-25411, опублик. 23.08.75, заявл. 15.07.69 г. №44-55597]. Данный способ принимаем за прототип. В соответствии с прототипом измеряют ток и напряжение на электролизере, определяют его электрическое сопротивление и, в случае, если электрическое сопротивление отличается от его заданного значения больше, чем на величину установленной зоны нечувствительности, производят вертикальное перемещение анода пропорционально отклонению электрического сопротивления от его заданного значения, стабилизируя таким образом сопротивление электролизера. Величину заданного значения сопротивления можно менять в зависимости от различных факторов, влияющи х на тепловой баланс электролизера (температура электролита, температура окружающей среды, состав электролита и проч.). Недостатком прототипа является невысокое качество управления тепловым режимом электролизера, обусловленное наличием зоны нечувствительности. Уменьшение же зоны нечувстви тельности приводит к увеличению частоты включения приводов анода. Частые перемещения анода препятствуют образованию корки электролита и увеличивают теплопотери от электролизера, что приводит к дополнительному ухудшению качества управления тепловым режимом. Предлагаемый способ управления тепловым режимом электролизера свободен от перечисленных недостатков и позволяет повысить качество управления без уменьшения зоны нечувствительности. Целью предлагаемого способа является повышение качества управления тепловым режимом электролизера за счет снижения частоты управляющих перемещений анода. Поставленная цель достигается тем, что в известном способе управления тепловым режимом электролизера для получения алюминия, включающем измерение напряжения на электролизере и тока через него, определение сопротивления электролизера и его стабилизацию вертикальными перемещениями анода пропорционально отклонению сопротивления от его заданного значения с учетом постоянной зоны нечувствительности, увеличивают величину постоянной зоны нечувствительности, вводят дополнительно переменную зону нечувствительности и фиксируют моменты перемещений анода, устанавливают величину переменной зоны нечувствительности в момент каждого перемещения анода равной величине постоянной зоны нечувствительности и уменьшают ее обратно пропорционально времени, прошедшему от момента последнего перемещения анода, определяют среднее отклонение сопротивления электролизера от заданного значения сопротивления за это время, сравнивают его с величиной переменной зоны нечувстви тельности и при выходе из нее дополнительно перемещают анод пропорционально среднему отклонению сопротивления электролизера от заданного значения сопротивления. Увеличение постоянной зоны нечувствительности позволяет сократить количество управляющих перемещений анода при резких изменениях тока, напряжения и сопротивления электролизера. Дополнительная фиксация моментов перемещения анода позволяет определять среднее отклонение сопротивления электролизера от заданного значения сопротивления за увеличивающийся интервал времени, прошедший от момента последнего перемещения анода. Заметная величина этого отклонения свидетельствует о постоянном характере возмущения, т.е. о нарушении стабилизации теплового режима, проявляющемся в виде систематической ошибки. Достоверность этой систематической ошибки растет по мере увеличения интервала времени, на котором, она определяется. Дополнительное введение переменной зоны нечувствительности, установление ее величины в момент каждого перемещения анода равной величине постоянной зоны нечувствительности и уменьшение ее обратно пропорционально времени, прошедшему от момента последнего перемещения анода позволяет согласовать величину систематической ошибки с достоверностью ее определения. Дополнительное перемещения анода пропорционально среднему отклонению сопротивления электролизера от заданного значения сопротивления при условии, что величина этого среднего отклонения превышает величину переменной зоны нечувствительности позволяет компенсировать возмущения, имеющие постоянный характер и повысить качество управления тепловым режимом электролизера. Применением указанных приемов удается достичь высокой точности стабилизации теплового режима электролизера при невысокой частоте управляющи х перемещений анода. Существенность отличий предлагаемого способа управления обусловлена тем, что расширение постоянной зоны нечувствительности, дополнительное введение переменной зоны нечувствительности, фиксация моментов перемещения анода, установление величины переменной зоны нечувствительности равной величине постоянной зоны нечувствительности в моменты перемещения анода и уменьшение переменной зоны нечувствительности обратно пропорционально времени, прошедшему от момента последнего перемещения анода, определение среднего отклонения сопротивления электролизера от заданного значения сопротивления за это время и дополнительное перемещение, анода пропорционально среднему отклонению со противления электролизера от заданного значения сопротивления при выходе этого отклонения за величину переменной зоны нечувствительности позволяют согласовать длительность и частоту управляющих перемещений анода с характером возмущений, воздействующих на процесс электролиза, уменьшить частоту перемещений анода без увеличения ошибки регулирования сопротивления и за счет этого повысить качество управления тепловым режимом процесса электролиза. Более подробно сущность и отличительные признаки предлагаемого способа управления иллюстрируются системой управления, реализующей указанный способ (фиг. 1) и графиками регулирования сопротивления электролизера при применении способа - прототипа (фиг. 2) и предлагаемого способа (фиг. 3). Электролизер 1 (фиг. 1) подключен к анодной 2 и катодной 3 ошиновке и снабжен угольным анодом 4. Рабочее напряжение электролизера Up измеряется измерителем 5, например преобразователем типа Е-846, Сила тока Ip измеряется измерителем 6, например, шунтом с нормирующим преобразователем Е-826. Система управления содержит вычислительный блок 7, блоки определения отклонений 8 и 9, блок измерения переменной зоны нечувствительности 10, блок вычисления управляющего воздействия 11, привод анода 12, таймер 13, задатчики 14, 15 и 16. Выходы измерителей 5 и 6 соединены со входами вычислительного блока 7, определяющего значение сопротивления электролизера, например, по формуле Величина противоЭДС Е поступает на вход вычислительного блока 7 от задатчика 15. Выход вычислительного блока 7 соединен со входами блоков определения отклонений 8 и 9, на другие входы которых подают сигналы с выхода задатчиков 14 и 16 (для блока 8) и с выходов блока изменения переменной зоны нечувствительности 10, таймера 13 и задатчика 16 (для блока 9). В блоке 8 определяется отклонение DR сопротивления электролизера от его заданного значения R3 и проверяется "выход" этого о тклонения за постоянную зону нечувствительности DR°3, например, по формуле: При соблюдении условия IDRI ³ IdR°3l сигнал с выхода блока 8 поступает на вход блока 11 для расчета управляющего воздействия. В блоке 9 определяется среднее значение отклонения сопротивления (DR)cp от заданного значения за изменяющийся интервал времени t от последнего перемещения анода и проверяется "выход" этого отклонения за переменную зону нечувствительности d R 3, например, по формуле: При соблюдении условия |(D R)Cpl³I dR3| сигнал с выхода блока 9 поступает на вход блока 11 для расчета управляющего воздействия. Входы блока изменения переменной зоны нечувстви тельности 10 соединены с выходами таймера 13 и задатчика зоны нечувствительности 14. В блоке 10 производится определение текущего значения переменной зоны нечувствительности, например, по формуле: где Κ1 - коэффициент настройки, величина которого определяется известными методами при настройке регулятора, например, по критерию минимума максимального отклонения сопротивления от заданного значения. На входы блока вычисления управляющего воздействия 11 поступают сигналы с выходов блоков 8 (величина D R) и 9 (величина (DR)cp), а выход блока 11 соединен с приводом анода 12, осуществляющим управляющее перемещение анода. Другой вы ход блока 11 соединен с входом таймера 13, который начинает новый отсчет времени при очередном включении привода анода. Вычисление управляющего воздействия осуществляют, например, по формуле: I) где Dt - общее управляющее воздействие (длительность перемещения анода, при знаке "+" - подъема анода, при знаке "-" - опускания), К - коэффициент регулятора. (Первоначальное его значение зависит от конструкции электролизера и характеристики электропривода анода. В процессе управления коэффициент К может корректироваться при настройке системы известными методами по критерию минимизации максимального отклонения сопротивления электролизера от заданного значения). Блоки 7-11,13-16 могут быть реализованы программой в УВК (например, СМ-2М), на входы которой подаются соответствующие сигналы от блоков 5, 6, а управляющий выход связан с приводом анода 12. Примеры реализации способа. Πример 1. Работа по способу-прототипу. Процесс электролиза проводят в электролизерах типа С175 Мз. Заданное значение сопротивления R3=13,0 мк Ом. Значение постоянной зоны нечувствительности d R°3= +0,5 мкОм. Коэффициент регулятора К=4,0 с/мкОм. Изменение сопротивления электролизера показано на фиг. 2. В моменты времени t1-t5 происходит управляющее перемещение анода (направление перемещения отмечено стрелками). Величина управляющих воздействий: в моменты времени t1, t 3, t5 : ("-"перемещение вниз). Величина управляющих воздействий в моменты времени t2 и t4 : Dt2 =Dt4 = 4,0(13,0-12,5)=2с (перемещение вверх). Результаты работы: частота внесения управляющих воз действий - 32 ед/сутки на электролизер; среднеквадратическая погрешность регулирования сопротивления - 0,4 мкОм; изменение температуры электролита 955°С-978°С. ориентировочный удельный расход электроэнергии - 15900 кВтч/т. Πример 2. Работа по предлагаемому способу. Процесс электролиза проводят в те х же электролизерах и при же условиях, что в примере 1. Заданное значение сопротивления R3=13,0мк Ом. Значение постоянной зоны нечувствительности d R°3=1,5 мк Ом. Коэффициент регулятора К=4,0 с/мк Ом. Изменение сопротивления электролизера показано на фиг. 3. В момент времени t1 производится управляющее воздействие: перемещение вниз): В этот момент начинается определение среднего отклонения сопротивления от заданного значения: и определение величины переменной зоны нечувствительности: (При настройке регулятора принято Κ1=1) производим дополнительное перемещение анода на величину: (перемещение вниз). Аналогично, в момент времени t3 (перемещение вверх) и в момент времени и: (перемещение вниз). Результаты работы: частота внесения управляющих воздействий -18 ед/сутки на электролизер; среднеквадратическая погрешность регулирования сопротивления -0,05 мк Ом; изменение температуры электролита -960-970°С; ориентировочный удельный расход электроэнергии 15600 кВт ч/т. Внедрение предлагаемого способа позволяет снизить погрешность регулирования сопротивления до ±0,05 мкОм и частоту управляющи х воздействий, повысить стабильность теплового режима (колебания температуры расплава не превышают 965±5,0°С) и за счет этого, по экспертной оценке, снизить частоту анодных эффектов и расход электроэнергии на 300 кВт ч/т алюминия.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for control of electrolyzer heating rate for aluminum obtaining
Автори англійськоюBerkh Vieniamin Isaakovich, Kazakov Dmitrii Romanovich, Lokshyn Robiert Hirshevich, Maiier Alieksandr Davidovich, Samolovov Sierhiei Alieksandrovich, Fiterman Mikhail Yakovlievich, Shupatskii Hiennadii Matvieievich
Назва патенту російськоюСпособ руководства тепловым режимом электролизера для получения алюминия
Автори російськоюБерх Вениамин Исаакович, Казаков Дмитрий Романович, Локшин Роберт Гиршевич, Майер Александр Давидович, Самоловов Сергей Александрович, Фитерман Михаил Яковлевич, Шупацкий Геннадий Матвеевич
МПК / Мітки
МПК: C25C 3/20
Мітки: режимом, тепловим, спосіб, електролізера, одержання, алюмінію, керування
Код посилання
<a href="https://ua.patents.su/5-19796-sposib-keruvannya-teplovim-rezhimom-elektrolizera-dlya-oderzhannya-alyuminiyu.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування тепловим режимом електролізера для одержання алюмінію</a>
Спосіб монтажу катодної секції електролізера для одержання алюмінію
Номер патенту: 4728
Опубліковано: 28.12.1994
Автори: Полніцький Євген Олександрович, Лакомський Віктор Йосипович, Кнігєль Владімір Августовіч, Таран Олександр Якович, Ющенко Костянтин Андрійович, Фрідман Михайло Олександрович, Бастрига Іван Михайлович
МПК: C25C 3/08
Мітки: секції, електролізера, алюмінію, одержання, спосіб, катодної, монтажу
Формула / Реферат:
Способ монтажа катодной секции электролизера для получения алюминия, включающий выполнение углублений в пазу блока, нанесение контактного слоя на поверхность паза блока, его расплавление и механическую обработку, отличающийся тем, что контактный слой наносят в углубления и на поверхность паза блока вокруг углублений на площади, ограниченной радиусом 7-75мм от оси углубления, и выдерживают его в расплавленном состоянии в течение 5-30...
Спосіб монтажу подової секції електролізера для одержання алюмінію
Номер патенту: 6532
Опубліковано: 29.12.1994
Автори: Полніцький Євген Олександрович, Таран Олександр Якович, Патон Борис Євгенович, Лебедєв Володимир Костянтинович, Лакомський Віктор Йосипович
МПК: C25C 3/08
Мітки: алюмінію, електролізера, подової, одержання, монтажу, секції, спосіб
Формула / Реферат:
(57) 1. Способ монтажа подовой секции электролизера для получения алюминия, включающий нанесение контактного слоя на поверхность паза углеродистого блока, установку металлического токоподводящего стержня в пазу и заливку его чугуном, отличающийся тем, что предварительно на поверхности паза блока выполняют углубления, всю поверхность паза нагревают до 900-1500°С, в качестве контактного слоя используют материал с электропроводностью больше,...
Спосіб керування тепловим станом доменної печі
Номер патенту: 4351
Опубліковано: 27.12.1994
Автори: Первушин Сергій Іванович, Вишняк Євген Григорович, Шумілов Кирило Андрійович, Мікрюков Борис Григорович, Секачов Віктор Гавриілович, Бошняков Аркадій Миколайович
МПК: C21B 7/24
Мітки: тепловим, станом, керування, спосіб, печі, доменної
Формула / Реферат:
Способ управления тепловым состоянием доменной печи, включающий прогнозирование на интервал времени t+ЗТ, где t-транспортное запаздывание; Т - постоянные времени канала "рудная нагрузка - кремний в чугуне", изменений содержания кремния в чугуне, вызванных контролируемыми изменениями состава и массы загружаемых шихтовых материалов, и коррекцию рудной нагрузки, пропорциональную прогнозируемым изменениям кремния от заданных...
Спосіб управління тепловим режимом доменної плавки
Номер патенту: 6128
Опубліковано: 29.12.1994
Автори: Бабіч Олександр Ілліч, Ярошевський Станіслав Львович, Бородулін Олександр Васильович, Складановський Євгеній Нікифорович, Ноздрачов Валерій Андрійович, Степанов Василь Васильович
МПК: C21B 7/24
Мітки: плавки, режимом, спосіб, доменної, управління, тепловим
Формула / Реферат:
1. Способ управлення тепловым режимом доменной плавки, включающий определение содержания кремния в чугуне, измерение его температуры и воздействие на расход топлива, температуру и влажность дутья, отличающийся тем, что, с целью экономии кокса, на расход топлива, температуру и влажность дутья воздействуют по величине отклонения химической и физической эксергий чуіуна от заданных значений.2. Способ по п. 1, отличающийся тем, что...
Пристрій для керування електричним режимом дугової сталеплавильної печі постійного струму
Номер патенту: 3022
Опубліковано: 26.12.1994
Автори: Філіпов Олексій Костянтинович, Маш'янов Володимир Гаврилович, Саньков Сергій Анатолійович, Магда Володимир Васильович, Малиновський Володимир Сергійович
МПК: H05B 7/148
Мітки: режимом, дугової, печі, постійного, струму, пристрій, сталеплавильної, електричним, керування
Формула / Реферат:
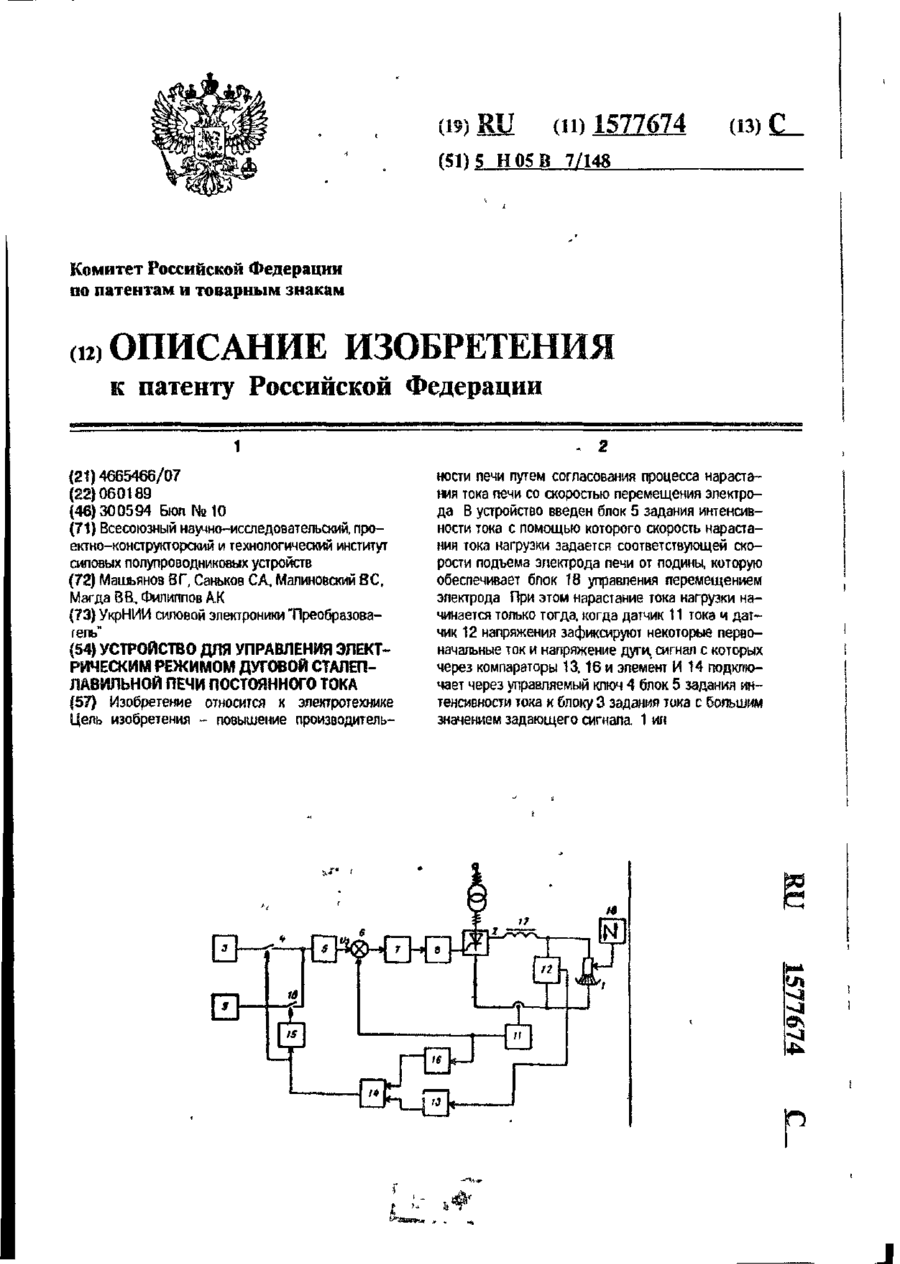
Устройство для управления электрическим режимом дуговой сталеплавильной печи постоянного тока, содержащее блок управления перемещением электрода, датчик тока электрода, выход которого соединен с первым входом блока сравнения, соединенного выходом с входом регулятора тока, выход которого соединен с входом системы импульсно-фазового управления источника питания, первый и второй блоки задания тока, первый и второй управляемые ключи и датчик...
Попередній патент: Спосіб захисту риб на водозаборах гідротехнічних споруд і систем для його здійснення
Наступний патент: Спосіб визначення оптимальної товщини стінки чавунної ливарної форми
Випадковий патент: Спосіб інтубації кишечнику і раннього ентерального харчування у хворих з гострою кишковою непрохідністю