Адаптивний пристрій фільтрації параметрів траєкторії маневруючої цілі
Номер патенту: 19892
Опубліковано: 15.01.2007
Автори: Луковський Олег Ярославович, Карлов Володимир Дмитрович, Квіткін Костянтин Петрович, Челпанов Артем Володимирович, Петрушенко Микола Миколайович, Гаврілкін Володимир Вільевич

Формула / Реферат
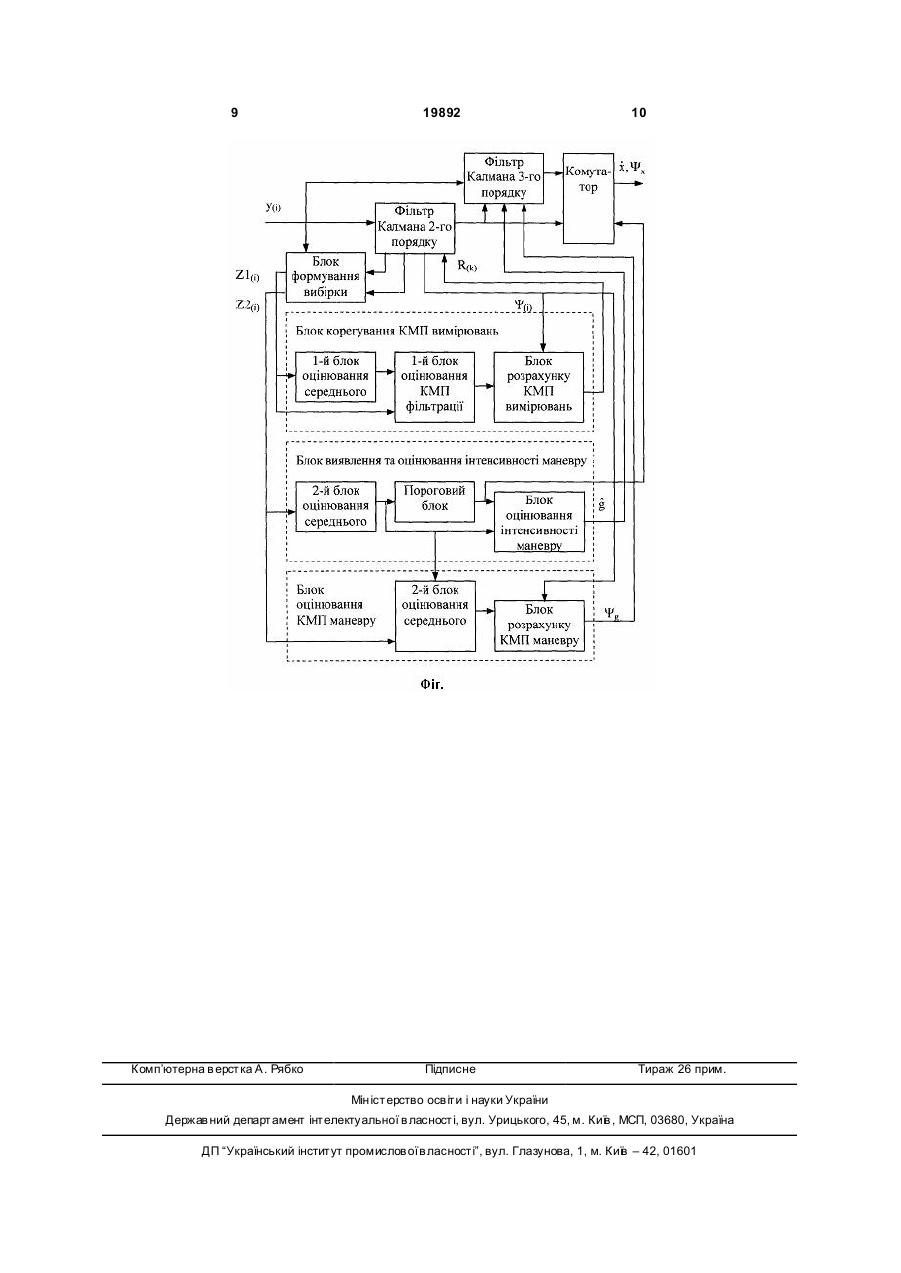
Адаптивний пристрій фільтрації параметрів траєкторії маневруючої цілі, що містить фільтр Калмана 2-го порядку, фільтр Калмана 3-го порядку і комутатор, який відрізняється тим, що додатково введені блок формування вибірки, блок корегування кореляційної матриці помилок (КМП) вимірювань у складі послідовно з'єднаних першого блока оцінювання середнього, першого блока оцінювання КМП фільтрації і блока розрахунку КМП вимірювань, блок виявлення і оцінювання інтенсивності маневру у складі послідовно з'єднаних другого блока оцінювання середнього, порогового блока і блока оцінювання інтенсивності маневру, а також блок оцінювання КМП маневру у складі послідовно з'єднаних другого блока оцінювання КМП фільтрації і блока розрахунку КМП маневру, причому перший вихід фільтра Калмана 2-го порядку з'єднаний з другими входами фільтра Калмана 3-го порядку і комутатора, другий та третій виходи фільтра Калмана 2-го порядку з'єднані з другим та третім входами блока формування вибірки, четвертий вихід фільтра Калмана 2-го порядку з'єднаний з другими входами блока розрахунку КМП вимірювань і блока розрахунку КМП маневру, вихід фільтра Калмана 3-го порядку з'єднаний з першим входом комутатора, перший вихід блока формування вибірки з'єднаний з входами першого блока оцінювання середнього і першого блока оцінювання КМП фільтрації, другий вихід блока формування вибірки з'єднаний з входом другого блока оцінювання середнього і другим входом другого блока оцінювання КМП фільтрації, вихід блока розрахунку КМП вимірювань з'єднаний з другим входом фільтра Калмана 2-го порядку, вихід блока оцінювання інтенсивності маневру з'єднаний з третім входом фільтра Калмана 3-го порядку, вихід блока розрахунку КМП маневру з'єднаний з четвертим входом фільтра Калмана 3-го порядку, вихід другого блока оцінювання середнього додатково з'єднаний з першим входом другого блока оцінювання КМП фільтрації і другим входом блока оцінювання інтенсивності маневру, вихід порогового блока додатково з'єднаний з третім входом комутатора, входом пристрою є суміщений вхід фільтрів Калмана 2-го та 3-го порядків і блока формування вибірки, а виходом пристрою є вихід комутатора.
Текст
Адаптивний пристрій фільтрації параметрів траєкторії маневруючої цілі, що містить фільтр Калмана 2-го порядку, фільтр Калмана 3-го порядку і комутатор, який відрізняється тим, що додатково введені блок формування вибірки, блок корегування кореляційної матриці помилок (КМП) вимірювань у складі послідовно з'єднаних першого блока оцінювання середнього, першого блока оцінювання КМП фільтрації і блока розрахунку КМП вимірювань, блок виявлення і оцінювання інтенсивності маневру у складі послідовно з'єднаних другого блока оцінювання середнього, порогового блока і блока оцінювання інтенсивності маневру, а також блок оцінювання КМП маневру у складі послідовно з'єднаних другого блока оцінювання КМП фільтрації і блока розрахунку КМП маневру, причому перший вихід фільтра Калмана 2-го порядку з'єднаний з другими входами фільтра Калмана 3го порядку і комутатора, другий та третій виходи U 2 19892 1 3 19892 інтенсивності маневру і параметрами настройки фільтра. Найбільш близьким до запропонованого технічним рішенням, обраним як прототип, є "Адаптивний пристрій супроводження маневруючих цілей" [2, с.163], який реалізує алгоритм оцінювання параметрів траєкторії цілі і врахування динамічних помилок, викликаних маневром цілі. Пристрій включає фільтр Калмана 2-го порядку, фільтр Калмана 3-го порядку, набір з N узгоджених фільтрів, а також пороговий блок і комутатор. В даному пристрої у фільтрі Калмана здійснюється рекурентна обробка послідовності вимірів, що надходять, з оцінюванням параметрів траєкторії цілі. Поточні значення помилок фільтрації надходять до N фільтрів, узгоджених з набором значень характеристик маневру. Далі здійснюється аналіз вихідних сигналів фільтрів для виявлення маневру та оцінювання його характеристик. При виявленні маневру здійснюється переключення на фільтр Калмана 3-го порядку, в якому враховується можливе значення прискорення маневру цілі. Недоліком даного пристрою є громіздкість схеми, і відповідно, значний обсяг обчислень. Крім того, не враховується можливість змінення (погіршення) точністних характеристик вимірювального тракту, наприклад, у випадку групової (складної) цілі недостатньо точно оцінюються характеристики маневру. Відповідно не корегуються (не уточнюються) КМП вимірювань і маневру та недостатньо компенсуються помилки екстраполяції і фільтрації. В основу корисної моделі поставлена задача створити такий адаптивний пристрій фільтрації параметрів траєкторії маневруючої цілі, в якому введення блоку формування вибірки, блоку корегування КМП вимірювань, блоку виявлення і оцінювання інтенсивності маневру і блоку оцінювання КМП маневру дозволить забезпечити по результатах аналізу поточних помилок фільтрації оцінювання точністних характеристик вимірювального тракту, виявлення і оцінювання характеристик маневру цілі. Поставлена задача вирішується за рахунок того, що в пристрої [2], який містить фільтр Калмана 2-го порядку, фільтр Калмана 3-го порядку, набір з N узгоджених фільтрів, пороговий блок і комутатор, додатково введені блок формування вибірки, блок корегування КМП вимірювань у складі послідовно з'єднаних першого блоку оцінювання середнього, першого блоку оцінювання КМП фільтрації і блоку розрахунку КМП вимірювань. Блок виявлення і оцінювання інтенсивності маневру у складі послідовно з'єднаних другого блоку оцінювання середнього, порогового блоку і блоку оцінювання інтенсивності маневру, а також блок оцінювання КМП маневру у складі послідовно з'єднаних другого блоку оцінювання КМП фільтрації і блоку розрахунку КМП маневру. Технічний результат, який може бути отриманий при здійсненні корисної моделі, полягає у тому, що точність оцінки параметрів траєкторії цілі підвищується за рахунок уточнення статистичних 4 характеристик поточних помилок вимірювань і відповідного корегування КМП вимірювань, КМП оцінювання і коефіцієнта підсилення фільтру, тим самим підвищується точність побудови траєкторії при зміні (збільшенні) помилок вимірювання, наприклад, при супроводженні групових (складних) і маневруючих цілей. На Фіг. приведена структурна схема запропонованого пристрою. Запропонований пристрій містить фільтр Калмана 2-го порядку, фільтр Калмана 3-го порядку, комутатор, блок формування вибірки, а також блок корегування КМП вимірювань у складі послідовно з'єднаних першого блоку оцінювання середнього, першого блоку оцінювання КМП фільтрації і блоку розрахунку КМП вимірювань; блок виявлення і оцінювання інтенсивності маневру у складі послідовно з'єднаних другого блоку оцінювання середнього, порогового блоку і блоку оцінювання інтенсивності маневру, а також блок оцінювання КМП маневру у складі послідовно з'єднаних другого блоку оцінювання КМП фільтрації і блоку розрахунку КМП маневру. Перший вихід фільтру Калмана 2-го порядку з'єднаний з другими входами фільтру Калмана 3го порядку і комутатор у, другий та третій виходи фільтру Калмана 2-го порядку з'єднані з другим та третім входами блоку формування вибірки, четвертий вихід фільтру Калмана 2-го порядку з'єднаний з другими входами блоку розрахунку КМП вимірювань і блоку розрахунку КМП маневру, вихід фільтру Калмана 3-го порядку з'єднаний з першим входом комутатору, перший вихід блоку формування вибірки з'єднаний з входами першого блоку оцінювання середнього і першого блоку оцінювання КМП фільтрації, другий вихід блоку формування вибірки з'єднаний з входом другого блоку оцінювання середнього і другим входом другого блоку оцінювання КМП фільтрації, вихід блоку розрахунку КМП вимірювань з'єднаний з другим входом фільтру Калмана 2-го порядку, вихід блоку оцінювання інтенсивності маневру з'єднаний з третім входом фільтру Калмана 3-го порядку, вихід блоку розрахунку КМП маневру з'єднаний з четвертим входом фільтру Калмана 3-го порядку, вихід другого блоку оцінювання середнього додатково з'єднаний з першим входом другого блоку оцінювання КМП фільтрації і другим входом блоку оцінювання інтенсивності маневру, ви хід порогового блоку додатково з'єднаний з третім входом комутатору, входом пристрою є суміщений вхід фільтрів Калмана 2-го та 3-го порядків і блоку формування вибірки, а виходом пристрою є вихід комутатору. Робота запропонованого пристрою полягає у наступному. При супроводженні цілі на вхід пристрою надходять виміряні значення координат цілі у(,) в кожному і-му такті роботи РЛС. На ділянці без маневру траєкторія цілі може бути представлена у вигляді поліному 1-ої степені: & x(i) + x 0 + x(t i - t 0 ) (1) , & - оцінювані параметри траєкторії (коде x0, x ординати та швидкості) на момент часу t 0. 5 19892 Найбільшу точність оцінок параметрів траєкторії цілі в цьому випадку дає обробка в лінійному фільтрі Калмана 2-го порядку [1]. В цьому фільтрі здійснюються перетворення вигляду: ˆ x(i ) = x e(i) + K (i) y( i) - Hx e(i) ; [ ] ˆ xe( i) = Fx(i -1); K( i) = 6 В першому блоці оцінювання КМП фільтрації здійснюється вибіркове незміщене оцінювання КМП фільтрації: yZ1K = k k 1 1 å Z1(i ) - Mk [Z1] Z1( i) - Mk [Z1] T = N - 1 å y Z1(i ) N -1 i = k -N+1 i = k -N+1 . { Значення y( i)HTR(-i1; ) [ y (i) = y e( i) - y e(i )HT Hy e(i )HT + R(i ) ] (2) -1 Hy e(i ); T y e( i) = Fy (i-1)F , ˆ x де (i) - оцінка вектору параметрів на поточний момент часу tі; Xе(і) - екстрапольоване значення параметру; K(і) - коефіцієнт підсилення фільтру; Z(i) = y(i) - Hx e(i) - значення нев'язки (помилки фільтрації); Н - матриця відповідності між значеннями вимірюваних і оцінюваних параметрів; F, F - відповідно, матричні оператори екстраполяції і перерахунку КМП екстраполяції (вони звичайно співпадають); y (i ) - КМП оцінки параметрів; y e( i) - КМП екстраполяції; R(i) - КМП вимірювань. ˆ x Отримані оцінки параметрів траєкторії (i) і y КМП (i ) крізь комутатор надходять на вихід пристрою. В ході обробки використовуються апріорні дані про помилки виміру (КМП вимірів або дисперсії). Однак статистичні характеристики погрішностей виміру в процесі супроводження цілей можуть змінюватися, наприклад, під впливом завад або якщо ціль групова (складна). Це призводить до неточного опису параметрів КМП вимірів і КМП оцінки параметрів та неоптимальності обробки, тобто до збільшення погрішностей при оцінюванні параметрів траєкторії. У зв'язку з цим виникає необхідність визначення характеристик погрішностей виміру в ході супроводження цілі і відповідної корекції КМП. Для визначення і уточнення статистичних характеристик погрішностей виміру в пристрої використовуються складові текущи х помилок фільтрації на виході фільтру Калмана 2-го порядку, які виділяються в блоці формування вибірки. ˆ Z1(i) = y(i) - H xe(i) (3) . Це можна зробити, тому що зміна помилок вимірів проявляється в зміні помилок фільтрації (значень нев'язок). Статистичні характеристики погрішностей вимірів оцінюються в блоці корегування КМП вимірювань. Для цього в першому блоці оцінювання середнього в межах "ковзного вікна" розміром N визначається вибіркове середнє значень вектору нев'язки Z1: 1 k Mk [Z1] = (4) å Z1 N i=k -N+1 (i) . }{ } (5) y Z 1( i) визначаються поточними веy личинами КМП оцінки параметрів траєкторії (i ) та КМП вимірювань R(і): y Z 1( i) = y (i) + R (i) (6) . Далі на основі (5) і (6) в блоці розрахунку КМП вимірювань формується емпірична оцінка для КМП вимірів для моменту часу t k: R( k) = k 1 é N -1 ù å êy Z1(i) - N Hy(i )HT ú N -1 i= k-N+1 ë û. (7) Отримані значення Mk[Z1] і R(k) надходять на фільтр Калмана, де використовуються для корегування КМП вимірювань і КМП оцінювання параметрів (2). Тим самим підвищується точність оцінювання параметрів траєкторії і ефективність супроводження цілі. У блоці виявлення і оцінювання інтенсивності маневру та блоці оцінювання КМП маневру здійснюється виявлення маневру цілі та оцінювання його характеристик - інтенсивності маневру та КМП маневру. Це необхідно для адаптивного корегування екстрапольованих значень і КМП оцінки параметрів траєкторії. При наявності маневру цілі з'являється складова збурювань W(і) в рівнянні стану об'єкту (траєкторії цілі): x(i ) = Fx (i-1) + ГW( i) (8) , де W(i) - вплив, який збурює, характеризуємий, зокрема, інтенсивністю маневру g; Г - перехідна матриця збурювань. Значення інтенсивності маневру g розподілено за нормальним законом зі середнім g і коре y ляційною матрицею g . Маневр цілі призводить до збільшення поточних помилок фільтрації, зокрема, складової нев'язки: ˆ Z2( i) = x (i) - x e(i) (9) . Для виявлення маневру цілі можна використовувати вибіркове середнє значення нев'язки M[Z2] в "ковзному вікні" розміром N: 1 k (10) å Z2 N i=k -N+1 ( i) Вибіркове значення нев'язки формується у другому блоці оцінювання середнього. Далі в пороговому блоку здійснюється порівняння з порогом: Mk [Z 2 ] ³ Z пор (11) . Величина порогу виявлення обирається виходячи з заданих значень ймовірності правильного виявлення і хибної тривоги. При цьому враховується, що значення Mk[Z2] підпорядковується нецентральному c2-розподілу з r*N ступенями свободи, Mk [Z 2] = 7 19892 де r - розмірність вектору вимірювань, а N - розмір вибірки [1]. Далі у блоку оцінювання інтенсивності маневру здійснюється оцінювання інтенсивності маневру. Для лінійного фільтру можна записати [3]: 2 TN g (12) 12 , де TN - інтервал накопичення вибірок при усередненні; j(A, N) - функція усереднення; Mk [Z 2 ] = j( A ,N) ( AN - 1)2 + 1- 2(1 - A )N (13) ; A 2N2 А - коефіцієнт, який використовується при усередненні нев'язок (0
ДивитисяДодаткова інформація
Назва патенту англійськоюAdaptive device for filtering the parameters of the path of a maneuvering target
Автори англійськоюKarlov Volodymyr Dmytrovych, Kvitkin Kostiantyn Petrovych, Lukovskyi Oleg Yaroslavovych, Chelpanov Artem Volodymyrovych
Назва патенту російськоюАдаптивное устройство для фильтрации параметров траектории маневрирующей цели
Автори російськоюКарлов Владимир Дмитриевич, Квиткин Константин Петрович, Луковский Олег Ярославович, Челпанов Артем Владимирович
МПК / Мітки
МПК: G01S 13/52
Мітки: цілі, параметрів, траєкторії, пристрій, адаптивний, фільтрації, маневруючої
Код посилання
<a href="https://ua.patents.su/5-19892-adaptivnijj-pristrijj-filtraci-parametriv-traehktori-manevruyucho-cili.html" target="_blank" rel="follow" title="База патентів України">Адаптивний пристрій фільтрації параметрів траєкторії маневруючої цілі</a>
Пристрій фільтрації параметрів траєкторії цілі
Номер патенту: 12818
Опубліковано: 15.03.2006
Автори: Квіткін Костянтин Петрович, Коваль Олександр Андрійович, Петрушенко Микола Миколайович, Челпанов Артем Володимирович, Карлов Володимир Дмитрович, Луковський Олег Ярославович
МПК: G01S 13/52
Мітки: траєкторії, цілі, параметрів, фільтрації, пристрій
Формула / Реферат:
Пристрій фільтрації параметрів траєкторії цілі, що містить лінійний фільтр Калмана, N паралельно включених узгоджених фільтрів, блок вибору максимуму і блок порівняння з порогом, який відрізняється тим, що додатково введений другий фільтр Калмана, блок аналізу динамічних помилок, блок аналізу оцінок і блок комутатора, причому перший вихід першого фільтра Калмана з'єднаний із входом блока аналізу динамічних помилок, другий вихід - із входом...
Адаптивний пристрій фільтрації параметрів траєкторії цілей
Номер патенту: 67043
Опубліковано: 15.06.2004
Автори: Рафальський Юрій Іванович, Челпанов Артем Володимирович, Яровий Сергій Володимирович, Карлов Володимир Дмитрийович, Петрушенко Миколай Миколайович
МПК: G01S 13/52
Мітки: адаптивний, пристрій, цілей, траєкторії, параметрів, фільтрації
Формула / Реферат:
Адаптивний пристрій фільтрації параметра траєкторії цілі, що містить фільтр Калмана, пороговий блок і блок вибору максимуму, який відрізняється тим, що додатково введені три блоки пам'яті, блок суматора, блок формування вибірки, блок оцінки прискорення і блок корекції, до того ж, перший блок пам'яті, блок фільтра Калмана, другий блок пам'яті, блок суматора, блок формування вибірки, пороговий блок і блок вибору максимуму з'єднані послідовно,...
Адаптивний фільтр оцінки параметрів траєкторії цілі
Номер патенту: 48843
Опубліковано: 15.08.2002
Автори: Фик Олександр Ілліч, Савченко Микола Павлович, Челпанов Артем Володимирович, Карлов Володимир Дмитрович
МПК: G01S 13/52, G01S 13/00
Мітки: траєкторії, оцінки, цілі, фільтр, параметрів, адаптивний
Формула / Реферат:
Адаптивний фільтр оцінки параметрів траєкторії цілі, що містить блок обчислення кореляційної матриці помилок, послідовно з'єднані блок обчислення оцінок параметрів, пристрій що запам'ятовує та блок екстраполяції параметрів, який відрізняється тим, що додатково введено блок фазометра і вузол оцінки швидкості та прискорення у складі послідовно з'єднаних блоків генератора опорних функцій, блоку вирахування, корелятора і блоку формування оцінок,...
Адаптивний пристрій супроводу маневруючих цілей

Номер патенту: 56074
Опубліковано: 15.04.2003
Автори: Челпанов Артем Володимирович, Карлов Володимир Дмитрийович, Коваль Олександр Андрійович, Сірик Юрій Анатолійович, Пащенко Руслан Едуардович, Яровий Сергій Володимирович
МПК: G01S 13/00, G01S 13/52
Мітки: пристрій, адаптивний, маневруючих, супроводу, цілей
Формула / Реферат:
Адаптивний пристрій супроводу маневруючих цілей, що містить послідовно з'єднані блоки фільтра Калмана другого порядку, фільтра Калмана третього порядку і комутатор, який відрізняється тим, що додатково введені блок виявлення маневру і блок оцінки інтенсивності маневру, причому блок виявлення маневру складається із послідовно з'єднаних блока формування вибірок, блока обчислення рангу, блока обчислення рангової статистики і порогового блока, а...
Адаптивний вимірювач параметрів електромагнітного поля
Номер патенту: 11111
Опубліковано: 15.12.2005
Автори: Ільницький Людвіг Якович, Щербина Ольга Алімівна
МПК: G01R 29/08
Мітки: електромагнітного, поля, адаптивний, параметрів, вимірювач
Формула / Реферат:
Адаптивний вимірювач параметрів електромагнітного поля, що містить вимірювальну антену та генератор сигналів, який відрізняється тим, що вимірювальна антена складається з чотирьох лінійних вібраторів антенної решітки, розміщених перпендикулярно один до одного, виходи чотирьох лінійних вібраторів антенної решітки підключені відповідно до перших входів чотирьох перемикачів режимів роботи, на другі входи яких підключений перший вихід процесора,...
Попередній патент: Консервна нарізна кришка надвисокої частоти
Наступний патент: Спосіб інтерактивної взаємодії учасників масових заходів
Випадковий патент: Засіб для профілактики і лікування вільнорадикального пошкодження органів і тканин