Адаптивний пристрій фільтрації параметрів траєкторії цілей
Номер патенту: 67043
Опубліковано: 15.06.2004
Автори: Рафальський Юрій Іванович, Карлов Володимир Дмитрийович, Яровий Сергій Володимирович, Петрушенко Миколай Миколайович, Челпанов Артем Володимирович
Формула / Реферат
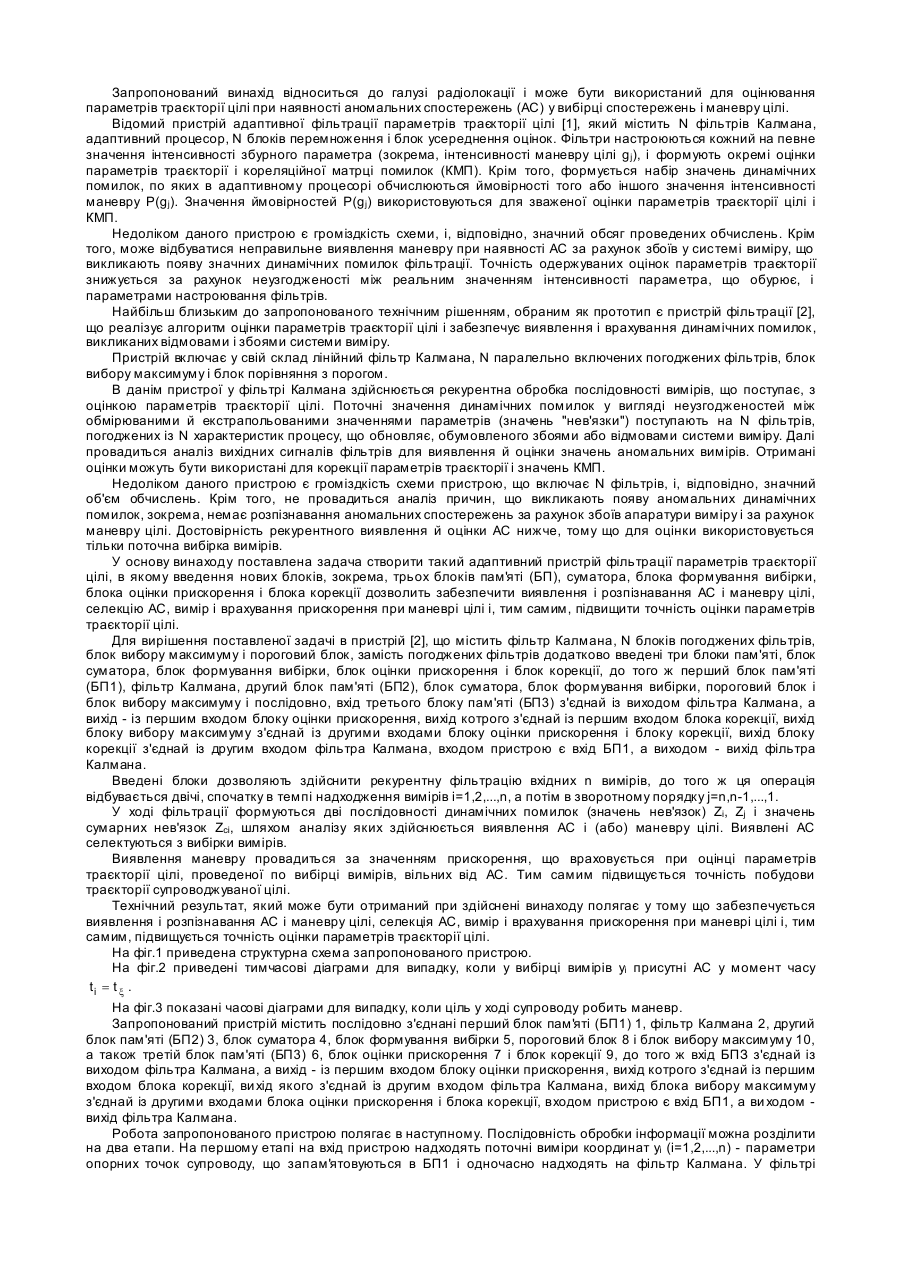
Адаптивний пристрій фільтрації параметра траєкторії цілі, що містить фільтр Калмана, пороговий блок і блок вибору максимуму, який відрізняється тим, що додатково введені три блоки пам'яті, блок суматора, блок формування вибірки, блок оцінки прискорення і блок корекції, до того ж, перший блок пам'яті, блок фільтра Калмана, другий блок пам'яті, блок суматора, блок формування вибірки, пороговий блок і блок вибору максимуму з'єднані послідовно, вхід третього блока пам'яті з’єднаний із виходом фільтра Калмана, а вихід - із першим входом блока оцінки прискорення, вихід якого з’єднаний із першим входом блока корекції, вихід блока вибору максимуму з’єднаний із другими входами блока оцінки прискорення і блока корекції, вихід блока корекції з’єднаний з другим входом фільтра Калмана, входом пристрою є вхід першого блока пам'яті, а виходом - вихід блока фільтра Калмана.
Текст
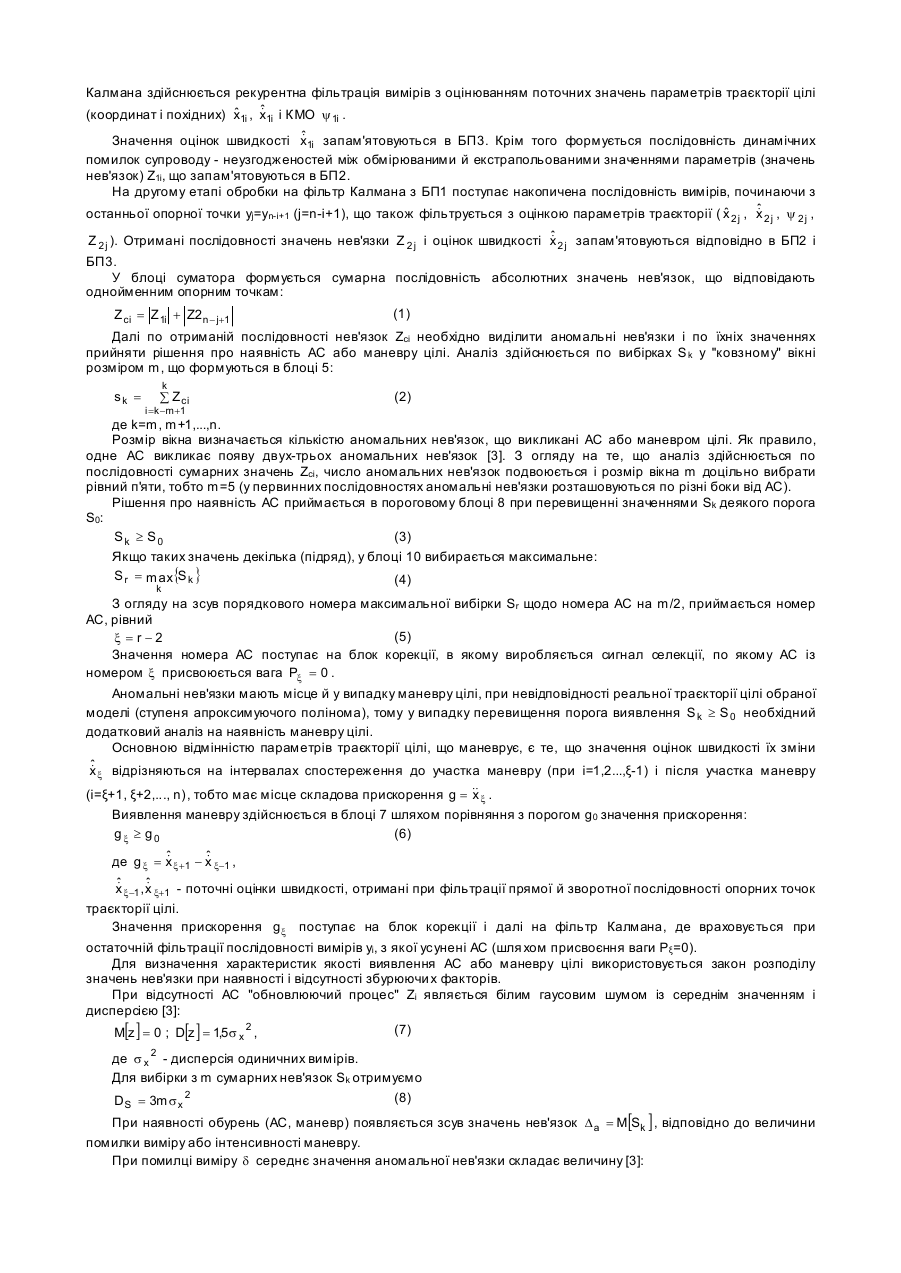
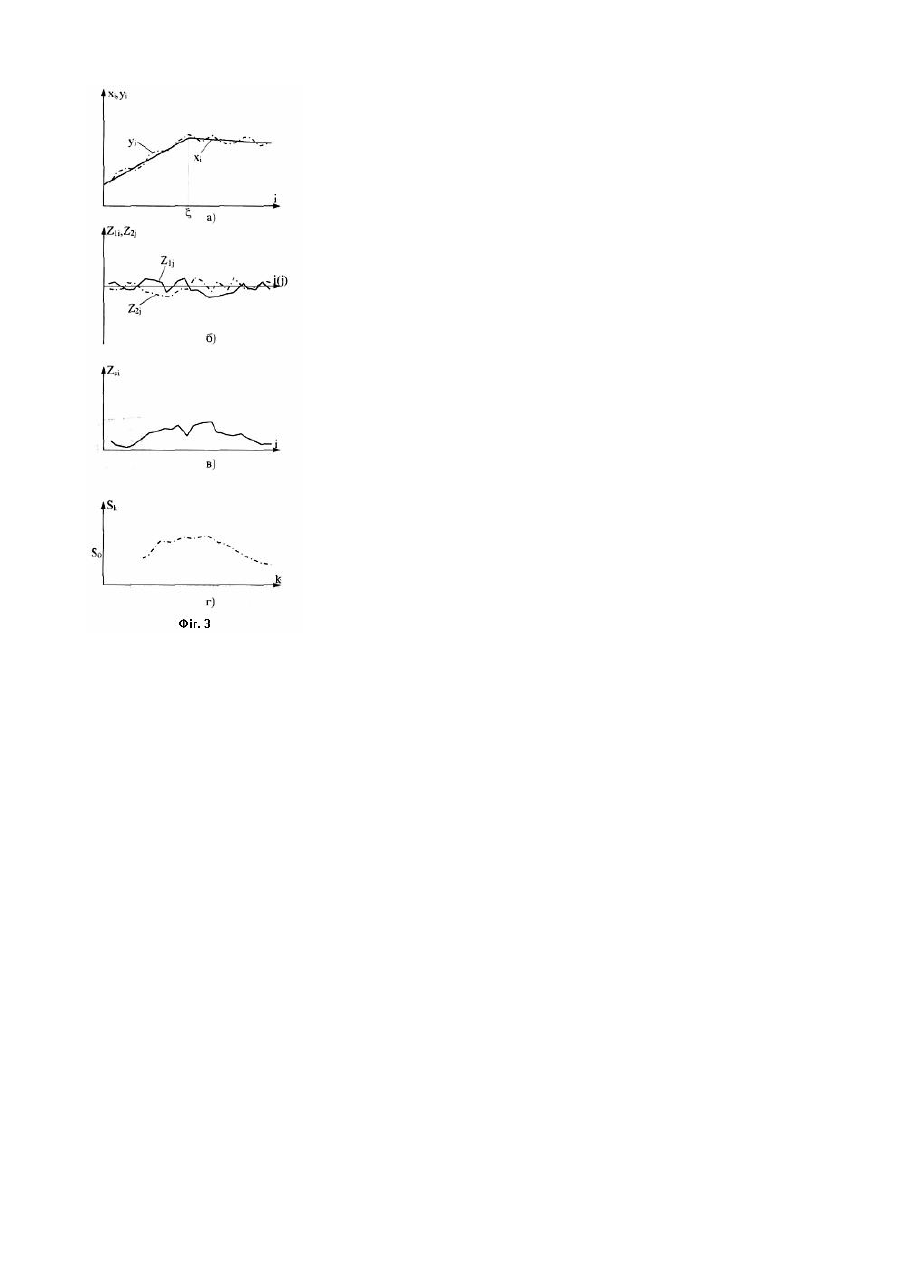
Запропонований винахід відноситься до галузі радіолокації і може бути використаний для оцінювання параметрів траєкторії цілі при наявності аномальних спостережень (АС) у вибірці спостережень і маневру цілі. Відомий пристрій адаптивної фільтрації параметрів траєкторії цілі [1], який містить N фільтрів Калмана, адаптивний процесор, N блоків перемноження і блок усереднення оцінок. Фільтри настроюються кожний на певне значення інтенсивності збурного параметра (зокрема, інтенсивності маневру цілі g j), і формують окремі оцінки параметрів траєкторії і кореляційної матрці помилок (КМП). Крім того, формується набір значень динамічних помилок, по яких в адаптивному процесорі обчислюються ймовірності того або іншого значення інтенсивності маневру P(gj). Значення ймовірностей P(gj) використовуються для зваженої оцінки параметрів траєкторії цілі і КМП. Недоліком даного пристрою є громіздкість схеми, і, відповідно, значний обсяг проведених обчислень. Крім того, може відбуватися неправильне виявлення маневру при наявності АС за рахунок збоїв у системі виміру, що викликають появу значних динамічних помилок фільтрації. Точність одержуваних оцінок параметрів траєкторії знижується за рахунок неузгодженості між реальним значенням інтенсивності параметра, що обурює, і параметрами настроювання фільтрів. Найбільш близьким до запропонованого технічним рішенням, обраним як прототип є пристрій фільтрації [2], що реалізує алгоритм оцінки параметрів траєкторії цілі і забезпечує виявлення і врахування динамічних помилок, викликаних відмовами і збоями системи виміру. Пристрій включає у свій склад лінійний фільтр Калмана, N паралельно включених погоджених фільтрів, блок вибору максимуму і блок порівняння з порогом. В данім пристрої у фільтрі Калмана здійснюється рекурентна обробка послідовності вимірів, що поступає, з оцінкою параметрів траєкторії цілі. Поточні значення динамічних помилок у вигляді неузгодженостей між обмірюваними й екстрапольованими значеннями параметрів (значень "нев'язки") поступають на N фільтрів, погоджених із N характеристик процесу, що обновляє, обумовленого збоями або відмовами системи виміру. Далі провадиться аналіз вихідних сигналів фільтрів для виявлення й оцінки значень аномальних вимірів. Отримані оцінки можуть бути використані для корекції параметрів траєкторії і значень КМП. Недоліком даного пристрою є громіздкість схеми пристрою, що включає N фільтрів, і, відповідно, значний об'єм обчислень. Крім того, не провадиться аналіз причин, що викликають появу аномальних динамічних помилок, зокрема, немає розпізнавання аномальних спостережень за рахунок збоїв апаратури виміру і за рахунок маневру цілі. Достовірність рекурентного виявлення й оцінки АС нижче, тому що для оцінки використовується тільки поточна вибірка вимірів. У основу винаходу поставлена задача створити такий адаптивний пристрій фільтрації параметрів траєкторії цілі, в якому введення нових блоків, зокрема, трьох блоків пам'яті (БП), суматора, блока формування вибірки, блока оцінки прискорення і блока корекції дозволить забезпечити виявлення і розпізнавання АС і маневру цілі, селекцію АС, вимір і врахування прискорення при маневрі цілі і, тим самим, підвищити точність оцінки параметрів траєкторії цілі. Для вирішення поставленої задачі в пристрій [2], що містить фільтр Калмана, N блоків погоджених фільтрів, блок вибору максимуму і пороговий блок, замість погоджених фільтрів додатково введені три блоки пам'яті, блок суматора, блок формування вибірки, блок оцінки прискорення і блок корекції, до того ж перший блок пам'яті (БП1), фільтр Калмана, другий блок пам'яті (БП2), блок суматора, блок формування вибірки, пороговий блок і блок вибору максимуму і послідовно, вхід третього блоку пам'яті (БП3) з'єднай із виходом фільтра Калмана, а вихід - із першим входом блоку оцінки прискорення, вихід котрого з'єднай із першим входом блока корекції, вихід блоку вибору максимуму з'єднай із другими входами блоку оцінки прискорення і блоку корекції, вихід блоку корекції з'єднай із другим входом фільтра Калмана, входом пристрою є вхід БП1, а виходом - вихід фільтра Калмана. Введені блоки дозволяють здійснити рекурентну фільтрацію вхідних n вимірів, до того ж ця операція відбувається двічі, спочатку в темпі надходження вимірів і=1,2,...,n, а потім в зворотному порядку j=n,n-1,...,1. У ході фільтрації формуються дві послідовності динамічних помилок (значень нев'язок) Ζі, Ζj і значень сумарних нев'язок Zci, шляхом аналізу яких здійснюється виявлення АС і (або) маневру цілі. Виявлені АС селектуються з вибірки вимірів. Виявлення маневру провадиться за значенням прискорення, що враховується при оцінці параметрів траєкторії цілі, проведеної по вибірці вимірів, вільних від АС. Тим самим підвищується точність побудови траєкторії супроводжуваної цілі. Технічний результат, який може бути отриманий при здійснені винаходу полягає у тому що забезпечується виявлення і розпізнавання АС і маневру цілі, селекція АС, вимір і врахування прискорення при маневрі цілі і, тим самим, підвищується точність оцінки параметрів траєкторії цілі. На фіг.1 приведена структурна схема запропонованого пристрою. На фіг.2 приведені тимчасові діаграми для випадку, коли у вибірці вимірів уі присутні АС у момент часу ti = t x . На фіг.3 показані часові діаграми для випадку, коли ціль у ході супроводу робить маневр. Запропонований пристрій містить послідовно з'єднані перший блок пам'яті (БП1) 1, фільтр Калмана 2, другий блок пам'яті (БП2) 3, блок суматора 4, блок формування вибірки 5, пороговий блок 8 і блок вибору максимуму 10, а також третій блок пам'яті (БП3) 6, блок оцінки прискорення 7 і блок корекції 9, до того ж вхід БПЗ з'єднай із виходом фільтра Калмана, а вихід - із першим входом блоку оцінки прискорення, вихід котрого з'єднай із першим входом блока корекції, ви хід якого з'єднай із другим входом фільтра Калмана, вихід блока вибору максимуму з'єднай із другими входами блока оцінки прискорення і блока корекції, входом пристрою є вхід БП1, а ви ходом вихід фільтра Калмана. Робота запропонованого пристрою полягає в наступному. Послідовність обробки інформації можна розділити на два етапи. На першому етапі на вхід пристрою надходять поточні виміри координат уі (i=1,2,...,n) - параметри опорних точок супроводу, що запам'ятовуються в БП1 і одночасно надходять на фільтр Калмана. У фільтрі Калмана здійснюється рекурентна фільтрація вимірів з оцінюванням поточних значень параметрів траєкторії цілі ˆ & ˆ (координат і похідних) x1i , x1i і КМО y 1i . ˆ & Значення оцінок швидкості x1i запам'ятовуються в БП3. Крім того формується послідовність динамічних помилок супроводу - неузгодженостей між обмірюваними й екстрапольованими значеннями параметрів (значень нев'язок) Z1i, що запам'ятовуються в БП2. На другому етапі обробки на фільтр Калмана з БП1 поступає накопичена послідовність вимірів, починаючи з ˆ & ˆ останньої опорної точки yj=yn-i+1 (j=n-i+1), що також фільтрується з оцінкою параметрів траєкторії ( x , x , y , 2j Z 2 j ). Отримані послідовності значень нев'язки Z 2 j 2j 2j ˆ & і оцінок швидкості x 2 j запам'ятовуються відповідно в БП2 і БП3. У блоці суматора формується сумарна послідовність абсолютних значень нев'язок, що відповідають однойменним опорним точкам: Z ci = Z 1i + Z2 n - j+1 (1) Далі по отриманій послідовності нев'язок Ζсі необхідно виділити аномальні нев'язки і по їхніх значеннях прийняти рішення про наявність АС або маневру цілі. Аналіз здійснюється по вибірках S k у "ковзному" вікні розміром m, що формуються в блоці 5: sk = k å Z ci (2) i =k -m+1 де k=m, m+1,...,n. Розмір вікна визначається кількістю аномальних нев'язок, що викликані АС або маневром цілі. Як правило, одне АС викликає появу двух-трьох аномальних нев'язок [3]. З огляду на те, що аналіз здійснюється по послідовності сумарних значень Zci, число аномальних нев'язок подвоюється і розмір вікна m доцільно вибрати рівний п'яти, тобто m=5 (у первинних послідовностях аномальні нев'язки розташовуються по різні боки від АС). Рішення про наявність АС приймається в пороговому блоці 8 при перевищенні значеннями Sk деякого порога S0: Sk ³ S0 (3) Якщо таких значень декілька (підряд), у блоці 10 вибирається максимальне: S r = max{S k } (4) k З огляду на зсув порядкового номера максимальної вибірки Sr щодо номера АС на m/2, приймається номер АС, рівний (5) x =r-2 Значення номера АС поступає на блок корекції, в якому виробляється сигнал селекції, по якому АС із номером x присвоюється вага Px = 0 . Аномальні нев'язки мають місце й у випадку маневру цілі, при невідповідності реальної траєкторії цілі обраної моделі (ступеня апроксимуючого полінома), тому у випадку перевищення порога виявлення S k ³ S 0 необхідний додатковий аналіз на наявність маневру цілі. Основною відмінністю параметрів траєкторії цілі, що маневрує, є те, що значення оцінок швидкості їх зміни ˆ відрізняються на інтервалах спостереження до участка маневру (при i=1,2...,ξ-1) і після участка маневру & x x (i=ξ+1, ξ+2,..., n), тобто має місце складова прискорення g = && x . x Виявлення маневру здійснюється в блоці 7 шляхом порівняння з порогом g 0 значення прискорення: gx ³ g0 (6) ˆ ˆ & & де g x = x x +1 - x x-1 , ˆ ˆ & & x x -1 ,x x+1 - поточні оцінки швидкості, отримані при фільтрації прямої й зворотної послідовності опорних точок траєкторії цілі. Значення прискорення g x поступає на блок корекції і далі на фільтр Калмана, де враховується при остаточній фільтрації послідовності вимірів уі, з якої усунені АС (шля хом присвоєння ваги Ρξ =0). Для визначення характеристик якості виявлення АС або маневру цілі використовується закон розподілу значень нев'язки при наявності і відсутності збурюючи х факторів. При відсутності АС "обновлюючий процес" Zi являється білим гаусовим шумом із середнім значенням і дисперсією [3]: (7) M[z ] = 0 ; D[z ] = 1,5s x 2 , де s x 2 - дисперсія одиничних вимірів. Для вибірки з m сумарних нев'язок Sk отримуємо (8) DS = 3m s x 2 При наявності обурень (АС, маневр) появляється зсув значень нев'язок D a = M[Sk ] , відповідно до величини помилки виміру або інтенсивності маневру. При помилці виміру d середнє значення аномальної нев'язки складає величину [3]: 1 (9) d 2 Усереднене значення нев'язки за рахунок маневру цілі з інтенсивністю g змінюється відповідно до квадратичної складової [3]; Da = T 2 (i - x ) g (10) 12 де T - період відновлення інформації; x - номер опорної точки, що відповідає початку маневру; j(i ) - згладжуюча функція. Ймовірність помилкового виявлення АС (або маневру) можна представити через інтегральну функцію розподілу нормальної випадкової величини: 2 D ai = j(i) æ S ö Pлт = 1 - Fç 0 ÷ (11) ç D ÷ s ø è Відповідно, ймовірність виявлення АС: æS - D ö a ÷ P0 = F ç 0 (12) ç Ds ÷ è ø де æ t2 ö 1 x ÷ dt F(x ) = (13) ò expç ç 2÷ 2p - ¥ è ø Величина порога S0 вибирається виходячи з заданої ймовірності помилкової тривоги. При технічній реалізації запропонованого пристрою можна використовувати такі типові вузли і блоки радіоелектронної апаратури. Блок фільтра Калмана, пороговий блок і блок вибору максимуму можуть бути виконані на основі типових функціональних елементів [2]. Блоки пам'яті, суматор, блок оцінки прискорення, блок формування вибірки і блок корекції забезпечують здійснення арифметичних і логічних операцій відповідно до виразів (1)...(6), і можуть бути виконані на основі типових інтегральних мікросхем [4], або на базі мікропроцесора. Послідовність включення в роботу окремих блоків пристрою і порядок їхньої взаємодії на відповідних етапах обробки, а також порядок запису і зняття інформації визначається і забезпечується сіткою управляючих і синхронизуючих імпульсів, "прив'язаних" до сітки сінхронизатора радіолокаційної станції (вузол синхронізації і управління на схемі не показаний). Позитивний ефект, що дає використання запропонованого пристрою полягає у наступному. Підвищується точність оцінки за рахунок вилучення АС із послідовності опорних точок, що фільтруються. При виявленні маневру, оцінюванню й врахуванню прискорення з більш високою точністю визначаються параметри траєкторії, тому що вра ховується квадратична складова (10). При двосторонній фільтрації, у порівнянні з рекурентним алгоритмом, збільшується об'єм виборки вимірів, що використана в ході обробки, тим самим збільшується точність оцінок параметрів траєкторії і достовірність виявлення АС і маневру. Кількісно виграш В в потенційній точності згладженої оцінки при двосторонній фільтрації в порівнянні із звичайною рекурентною обробкою можна оцінити за допомогою співвідношення дисперсій [5]: D 2 B = x1 = 2 (14) Dx 2 1+ 1+ q де Dx1, Dx2 - дисперсії оцінок відповідно при односторонній і двосторонній фільтрації вимірів; q - відношення сигнал/шум при проведенні вимірів, що визначать дисперсію одиничних вимірів. При q>>1 значення В ринеться до двох. Джерела інформації 1. Кузьмін С.З. Цифровая радиолокация. - К.: КВЩ, 2000. - 255с. 2. Гришин Ю.П., Казаринов Ю.М. Динамические системы, устойчивые к отказам. - Μ.: Радио и связь, 1985. 185с. 3. Саврасов Ю.С. Алгоритмы и программы в радиолокации. - М.: Радио и связь, 1985.-216с. 4. Цифровые и аналоговые интегральные микросхемы. Довідник./Під ред. С.В. Якубовского. - М.: Радио и связь, 1989. - 496с. 5. Тихонов В.И., Харисов Β.Η. Статистический анализ и синтез радиотехнических устройств и систем. - М.: Радио и связь, 1991. - 608с.
ДивитисяДодаткова інформація
Назва патенту англійськоюAdaptive device for filtering data for target parameters
Автори англійськоюChelpanov Artem Volodymyrovych
Назва патенту російськоюАдаптивное устройство для фильтрации данных о параметрах целей
Автори російськоюЧелпанов Артем Владимирович
МПК / Мітки
МПК: G01S 13/52
Мітки: траєкторії, фільтрації, цілей, адаптивний, параметрів, пристрій
Код посилання
<a href="https://ua.patents.su/5-67043-adaptivnijj-pristrijj-filtraci-parametriv-traehktori-cilejj.html" target="_blank" rel="follow" title="База патентів України">Адаптивний пристрій фільтрації параметрів траєкторії цілей</a>
Адаптивний фільтр оцінки параметрів траєкторії цілі
Номер патенту: 48843
Опубліковано: 15.08.2002
Автори: Савченко Микола Павлович, Челпанов Артем Володимирович, Карлов Володимир Дмитрович, Фик Олександр Ілліч
МПК: G01S 13/52, G01S 13/00
Мітки: фільтр, цілі, параметрів, оцінки, траєкторії, адаптивний
Формула / Реферат:
Адаптивний фільтр оцінки параметрів траєкторії цілі, що містить блок обчислення кореляційної матриці помилок, послідовно з'єднані блок обчислення оцінок параметрів, пристрій що запам'ятовує та блок екстраполяції параметрів, який відрізняється тим, що додатково введено блок фазометра і вузол оцінки швидкості та прискорення у складі послідовно з'єднаних блоків генератора опорних функцій, блоку вирахування, корелятора і блоку формування оцінок,...
Адаптивний пристрій супроводу маневруючих цілей

Номер патенту: 56074
Опубліковано: 15.04.2003
Автори: Карлов Володимир Дмитрийович, Коваль Олександр Андрійович, Пащенко Руслан Едуардович, Яровий Сергій Володимирович, Сірик Юрій Анатолійович, Челпанов Артем Володимирович
МПК: G01S 13/52, G01S 13/00
Мітки: пристрій, цілей, адаптивний, супроводу, маневруючих
Формула / Реферат:
Адаптивний пристрій супроводу маневруючих цілей, що містить послідовно з'єднані блоки фільтра Калмана другого порядку, фільтра Калмана третього порядку і комутатор, який відрізняється тим, що додатково введені блок виявлення маневру і блок оцінки інтенсивності маневру, причому блок виявлення маневру складається із послідовно з'єднаних блока формування вибірок, блока обчислення рангу, блока обчислення рангової статистики і порогового блока, а...
Спосіб адаптивної фільтрації калмана для динамічних систем настроювання модельних і калібрувальних параметрів системи датчиків
Номер патенту: 49862
Опубліковано: 15.10.2002
Автор: Ланге Антті Аарне Ілмарі
МПК: H03H 21/00, G01D 18/00
Мітки: калмана, настроювання, фільтрації, динамічних, калібрувальних, систем, параметрів, спосіб, системі, адаптивної, датчиків, модельних
Формула / Реферат:
Спосіб адаптивної фільтрації Калмана для динамічних систем настроювання модельних і калібрувальних параметрів системи датчиків, яка супроводжується моделлю зовнішніх подій, у якій вихідні блоки датчиків забезпечують сигнали у відповідь на вказані зовнішні події і де послідовності одночасно оброблюваних значень вихідних сигналів датчиків є довгими, який складається з таких етапів:a) забезпечення блока бази даних для зберігання...
Пристрій для виміру параметрів сипучих матеріалів у потоці
Номер патенту: 67522
Опубліковано: 15.06.2004
Автор: Лехціер Олег Леонідович
МПК: G01N 9/00
Мітки: матеріалів, параметрів, потоці, сипучих, виміру, пристрій
Формула / Реферат:
Пристрій для виміру параметрів сипучих матеріалів у потоці, що містить вимірювальний перетворювач, задатчик періоду виміру, перетворювач параметрів переміщення і блок керування, причому вихід вимірювального перетворювача підключений до першого входу блока керування, вихід задатчика періоду виміру підключений до другого входу блока керування, а перший вихід перетворювача параметрів переміщення підключений до третього входу блока керування,...
Моноімпульсна система з фазовим пеленгатором цілей в кутомісцевій площині
Номер патенту: 62390
Опубліковано: 15.12.2003
Автори: Челпанов Володимир Валентинович, Вершинін Ігор Павлович, Дорошко Ігор Миколайович
МПК: G01S 13/00, G01S 13/52
Мітки: кутомісцевій, площині, моноімпульсна, система, цілей, пеленгатором, фазовим
Формула / Реферат:
Моноімпульсна система з фазовим пеленгатором цілей в кутомісцевій площині, що містить паралельно включені блоки першого і другого змішувачів і першого і другого підсилювачів проміжної частоти (ППЧ), блок першого гетеродина, вихід якого з'єднаний із другими входами блоків змішувачів, а виходи блоків змішувачів з'єднані з входами блоків першого і другого ППЧ, який відрізняється тим, що додатково введені блоки третього змішувача, другого...
Попередній патент: Спосіб саузерн-блот-гібридизації днк клітин для визначення та контролю генотоксичності речовин з властивостями інгібіторів днк-топоізомерази іі
Наступний патент: Спосіб дії на шкірно-м’язові утворення обличчя і шиї та пристрій для його здійснення
Випадковий патент: Ремонтно-монтажний склад, що швидко схоплюється