Пристрій фільтрації параметрів траєкторії цілі
Номер патенту: 12818
Опубліковано: 15.03.2006
Автори: Петрушенко Микола Миколайович, Карлов Володимир Дмитрович, Челпанов Артем Володимирович, Квіткін Костянтин Петрович, Коваль Олександр Андрійович, Луковський Олег Ярославович
Формула / Реферат
Пристрій фільтрації параметрів траєкторії цілі, що містить лінійний фільтр Калмана, N паралельно включених узгоджених фільтрів, блок вибору максимуму і блок порівняння з порогом, який відрізняється тим, що додатково введений другий фільтр Калмана, блок аналізу динамічних помилок, блок аналізу оцінок і блок комутатора, причому перший вихід першого фільтра Калмана з'єднаний із входом блока аналізу динамічних помилок, другий вихід - із входом першого блока пам'яті і третім входом другого фільтра Калмана, вихід блока аналізу динамічних помилок з'єднаний із другими входами фільтрів Калмана, вихід другого фільтра Калмана з'єднаний із входом другого блока пам'яті, вихід першого блока пам'яті з'єднаний з першими входами, а вихід другого блока пам'яті - із другими входами блоків аналізу оцінок і комутатора, вихід блока аналізу оцінок з'єднаний із третім входом блока комутатора, входом пристрою є сполучені входи першого і другого фільтрів Калмана, а виходом пристрою - вихід комутатора.
Текст
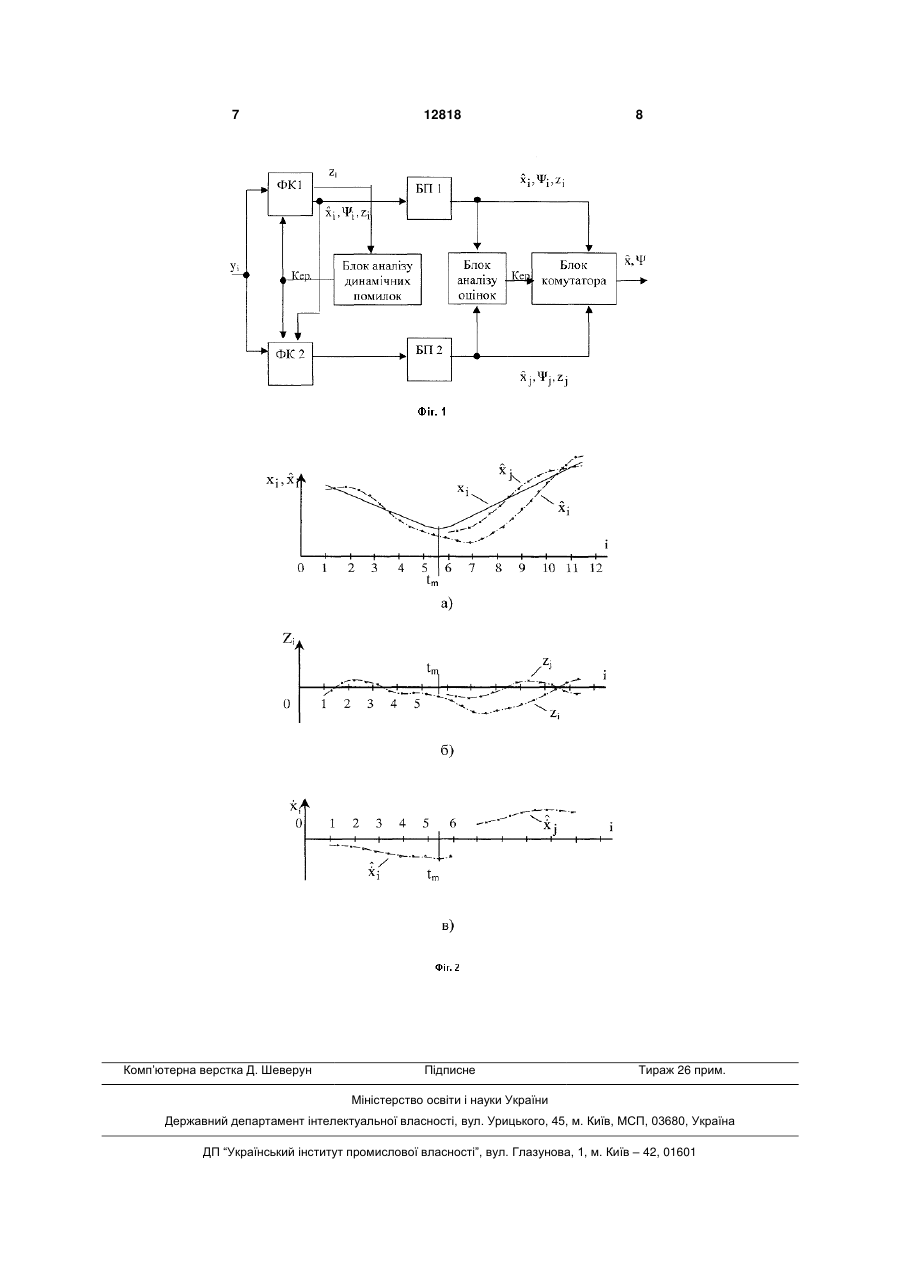
Пристрій фільтрації параметрів траєкторії цілі, що містить лінійний фільтр Калмана, N паралельно включених узгоджених фільтрів, блок вибору максимуму і блок порівняння з порогом, який відрізняється тим, що додатково введений другий фільтр Калмана, блок аналізу динамічних поми 3 тора дозволить забезпечити рекурентну обробку опорних крапок зі своєчасним виявленням і селекцією аномальних вимірів, а також виявлення маневру цілі й врахування його характеристик. При збільшенні динамічних помилок фільтрації для перевірки вірогідності вимірів додатково використовується інформація про чергові N опорних крапок, з вмиканням другого фільтра Калмана, призначеного для фільтрації параметрів цілі, що маневрує. Поставлена задача вирішується за рахунок того, що в пристрої [2], що містить перший фільтр Калмана (ФК1), перший і другий блок пам'яті (БП1 і БП2) додатково введений другий фільтр Калмана (ФК2), блок аналізу динамічних помилок, блок аналізу оцінок і блок комутатора, причому перший вихід ФК1 з'єднаний із входом блоку аналізу динамічних помилок, а другий вихід ФК1 - із входом БП1 і третім входом ФК2, вихід блоку аналізу динамічних помилок з'єднаний із другими виходами ФК1 і ФК2, вихід ФК2 з'єднаний із входом БП2, вихід БП1 з'єднаний з першими входами блоків аналізу оцінок і комутатора, а вихід БП2 з'єднаний із другими входами даних блоків, вихід блоку аналізу оцінок з'єднаний із третім входом блоку комутатора, входом пристрою є сполучені входи ФК1 та ФК2, а виходом пристрою - вихід комутатора. Введені блоки дозволяють здійснити рекурентну фільтрацію вхідних вимірів. Аналіз поточних динамічних помилок фільтрації й одержуваних оцінок параметрів траєкторії дозволяє знайти і діагностувати аномальні виміри і маневр цілі. Аномальні виміри селектируються, а для супроводу цілі, що маневрує, вмикається другий фільтр Калмана, у якому при фільтрації враховуються характеристики маневру, тим самим підвищується точність оцінок параметрів траєкторії і стійкість супроводу цілі в ході рекурентної обробки. Технічний результат, який може бути отриманий при здійсненні корисної моделі, полягає у тому, що підвищується точність оцінки за рахунок видалення аномальних вимірів з послідовності фільтруємих опорних крапок. Якість селекції підвищується, тому що для аналізу вірогідності n-го виміру додатково використовуються N опорних крапок, що випливають після даної зміни. При виявленні маневру включається другий фільтр Калмана, у якому за рахунок збільшення ваги виміру і коефіцієнта підсилення фільтра враховується зміна значень параметрів траєкторії цілі. На Фіг.1 приведена структурна схема запропонованого пристрою. На Фіг.2 приведені часові діаграми, що пояснюють обробку інформації в пристрої при маневрі цілі в момент часу tм. Запропонований пристрій включає перший фільтр Калмана (ФК1), другий фільтр Калмана (ФК2), блок аналізу динамічних помилок, перший блок пам'яті (БП1), другий блок пам'яті (БП2), блок аналізу оцінок і блок комутатора, причому перший вихід ФК1 з'єднаний із входом блоку аналізу динамічних помилок, а другий вихід ФК1 - із входом БП1 і третім входом ФК2. Вихід блоку аналізу динамічних помилок з'єднаний із другими входами ФК1 і ФК2. Вихід ФК2 з'єднаний із входом БП2, 12818 4 вихід БП1 з'єднаний з першими входами блоків аналізу оцінок і комутатора, а вихід БП2 з'єднаний із другими входами даних блоків. Вихід блоку аналізу оцінок з'єднаний із третім входом блоку комутатора. Входом пристрою є сполучені входи ФК1 і ФК2, а виходом пристрою - вихід комутатора. Робота запропонованого пристрою полягає у наступному. На вхід пристрою надходять обмірювані значення координат цілі уі (параметри опорних крапок на моменти часу tі, де і=1,2,...). У першому фільтрі Калмана (ФК1) здійснюється їхня фільтрація з оцінкою параметрів траєкторії i і кореляційної мат риці помилок i , що запам'ятовуються в першому блоці пам'яті (БП1). Обробка здійснюється рекурентне з надходженням опорних крапок. Вектор оцінок параметрів траєкторії i включає оцінки ко ординат x i і швидкості їх зміни x i . Обробка здійснюється на основі співвідношень для фільтра Калмана [3]. Зокрема оцінки параметрів траєкторії цілі формуються в одномірному випадку відповідно до виразу: (1) x i x ei K i ( y i x ei ), де уі - обмірювані значення параметра; хеі - екстрапольовані значення параметра; Кі - коефіцієнт підсилення фільтра, обумовлений значеннями елементів кореляційної матриці помилок та "вагою" виміру. Значення динамічних помилок фільтрації, зокрема, неузгодженості між обмірюваними й екстрапольованими значеннями zі=yі-хеі, (значення "нев'язок") надходять до блоку аналізу динамічних помилок. У даному блоці здійснюється аналіз значень zі шляхом порівняння їх з граничними величинами zn1, zn2. Тут перший поріг zn1 відповідає помилці, рівної 2 , а другий Zn2= 3 , де середньоквадратична помилка виміру відповідного параметра (координати цілі). Якщо z i z n1, (2) така помилка вважається припустимою, і процес фільтрації продовжується відповідно до (1). Якщо z i z n2 , (3) то вимір уi вважається аномальним і він селектується шляхом присвоєння йому ваги Pi=0. Відповідний керуючий сигнал надходить на ФК1. Якщо zn1
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for filtering the data on the parameters of a target trajectory
Автори англійськоюKarlov Volodymyr Dmytrovych, Kvitkin Kostiantyn Petrovych, Lukovskyi Oleg Yaroslavovych, Chelpanov Artem Volodymyrovych
Назва патенту російськоюУстройство для фильтрации данных о параметрах траектории цели
Автори російськоюКарлов Владимир Дмитриевич, Квиткин Константин Петрович, Луковский Олег Ярославович, Челпанов Артем Владимирович
МПК / Мітки
МПК: G01S 13/52
Мітки: фільтрації, цілі, траєкторії, параметрів, пристрій
Код посилання
<a href="https://ua.patents.su/4-12818-pristrijj-filtraci-parametriv-traehktori-cili.html" target="_blank" rel="follow" title="База патентів України">Пристрій фільтрації параметрів траєкторії цілі</a>
Адаптивний пристрій фільтрації параметрів траєкторії цілей
Номер патенту: 67043
Опубліковано: 15.06.2004
Автори: Петрушенко Миколай Миколайович, Карлов Володимир Дмитрийович, Рафальський Юрій Іванович, Яровий Сергій Володимирович, Челпанов Артем Володимирович
МПК: G01S 13/52
Мітки: параметрів, адаптивний, траєкторії, цілей, пристрій, фільтрації
Формула / Реферат:
Адаптивний пристрій фільтрації параметра траєкторії цілі, що містить фільтр Калмана, пороговий блок і блок вибору максимуму, який відрізняється тим, що додатково введені три блоки пам'яті, блок суматора, блок формування вибірки, блок оцінки прискорення і блок корекції, до того ж, перший блок пам'яті, блок фільтра Калмана, другий блок пам'яті, блок суматора, блок формування вибірки, пороговий блок і блок вибору максимуму з'єднані послідовно,...
Адаптивний фільтр оцінки параметрів траєкторії цілі
Номер патенту: 48843
Опубліковано: 15.08.2002
Автори: Челпанов Артем Володимирович, Карлов Володимир Дмитрович, Савченко Микола Павлович, Фик Олександр Ілліч
МПК: G01S 13/52, G01S 13/00
Мітки: цілі, оцінки, параметрів, траєкторії, фільтр, адаптивний
Формула / Реферат:
Адаптивний фільтр оцінки параметрів траєкторії цілі, що містить блок обчислення кореляційної матриці помилок, послідовно з'єднані блок обчислення оцінок параметрів, пристрій що запам'ятовує та блок екстраполяції параметрів, який відрізняється тим, що додатково введено блок фазометра і вузол оцінки швидкості та прискорення у складі послідовно з'єднаних блоків генератора опорних функцій, блоку вирахування, корелятора і блоку формування оцінок,...
Спосіб адаптивної фільтрації калмана для динамічних систем настроювання модельних і калібрувальних параметрів системи датчиків
Номер патенту: 49862
Опубліковано: 15.10.2002
Автор: Ланге Антті Аарне Ілмарі
МПК: G01D 18/00, H03H 21/00
Мітки: модельних, калібрувальних, параметрів, систем, фільтрації, системі, датчиків, спосіб, настроювання, динамічних, адаптивної, калмана
Формула / Реферат:
Спосіб адаптивної фільтрації Калмана для динамічних систем настроювання модельних і калібрувальних параметрів системи датчиків, яка супроводжується моделлю зовнішніх подій, у якій вихідні блоки датчиків забезпечують сигнали у відповідь на вказані зовнішні події і де послідовності одночасно оброблюваних значень вихідних сигналів датчиків є довгими, який складається з таких етапів:a) забезпечення блока бази даних для зберігання...
Пристрій для визначення радіальної швидкості цілі
Номер патенту: 37869
Опубліковано: 15.09.2003
Автори: КУКОЛЬНИЦЬКИЙ АНАТОЛІЙ ПИЛИПОВИЧ, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Немчин Олександр Федорович, Падалко Віктор Григорович, Каспирович Олександр Геннадійович, Мирошниченко Михайло Іванович, Мокеєв Юрій Геннадійович
МПК: G01S 13/524, G01S 7/00, G01S 13/00
Мітки: швидкості, визначення, радіальної, цілі, пристрій
Формула / Реферат:
Пристрій для визначення радіальної швидкості цілі, який містить гребінку з q доплерівських фільтрів, схему АБО, який відрізняється тим, що містить q порогових схем, блок вибору номера фільтра з інформаційним виходом та допоміжним виходом максимальної амплітуди, основний та допоміжний комутатори, суматор, віднімач, m блоків множення на постійний коефіцієнт, m основних схем порівняння, m допоміжних схем порівняння, дешифратор коду фазового...
Адаптивний пристрій супроводу маневруючих цілей

Номер патенту: 56074
Опубліковано: 15.04.2003
Автори: Коваль Олександр Андрійович, Яровий Сергій Володимирович, Пащенко Руслан Едуардович, Карлов Володимир Дмитрийович, Челпанов Артем Володимирович, Сірик Юрій Анатолійович
МПК: G01S 13/52, G01S 13/00
Мітки: супроводу, маневруючих, цілей, пристрій, адаптивний
Формула / Реферат:
Адаптивний пристрій супроводу маневруючих цілей, що містить послідовно з'єднані блоки фільтра Калмана другого порядку, фільтра Калмана третього порядку і комутатор, який відрізняється тим, що додатково введені блок виявлення маневру і блок оцінки інтенсивності маневру, причому блок виявлення маневру складається із послідовно з'єднаних блока формування вибірок, блока обчислення рангу, блока обчислення рангової статистики і порогового блока, а...
Попередній патент: Варіатор
Наступний патент: Пристрій для контролю оптичної зі зворотним зв`язком слідкуючої системи для позиціювання об`єкта
Випадковий патент: Процес нанесення покриття на подовжену заготовку