Динамічно настроюваний гіроскоп
Номер патенту: 5416
Опубліковано: 15.03.2005

Формула / Реферат
Динамічно настроюваний гіроскоп, що містить послідовно з'єднані ротор, пружний підвіс, вал та електропривід, який відрізняється тим, що він містить другий електропривід, причому вал першого електропривода через перший редуктор, перший тахогенератор і перший масштабний перетворювач підключений до другого входу другого суматора, вихід якого з'єднаний з входом другого підсилювача, з'єднаного з входом другого електропривода, вал другого електропривода через другий редуктор, другий тахогенератор і другий масштабний перетворювач підключений до другого входу першого суматора, вихід якого з'єднаний з входом першого підсилювача, вихід якого з'єднаний з входом першого електропривода, перші входи першого та другого суматорів об'єднані і утворюють електричний вхід системи, вали першого та другого електроприводів з'єднані з першим та другим входами механічного диференціала, вихід якого утворює вал обертання ротора гіроскопа.
Текст
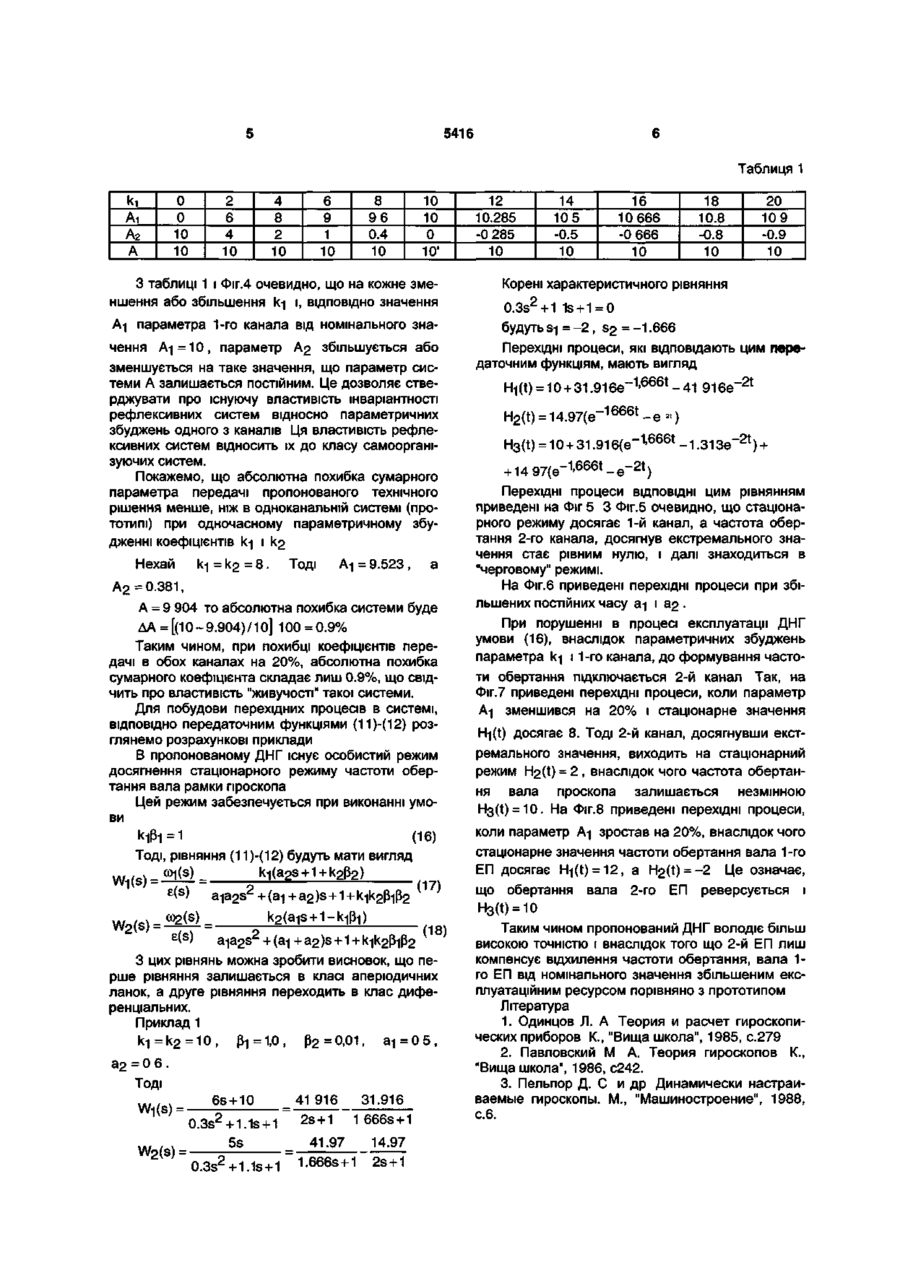
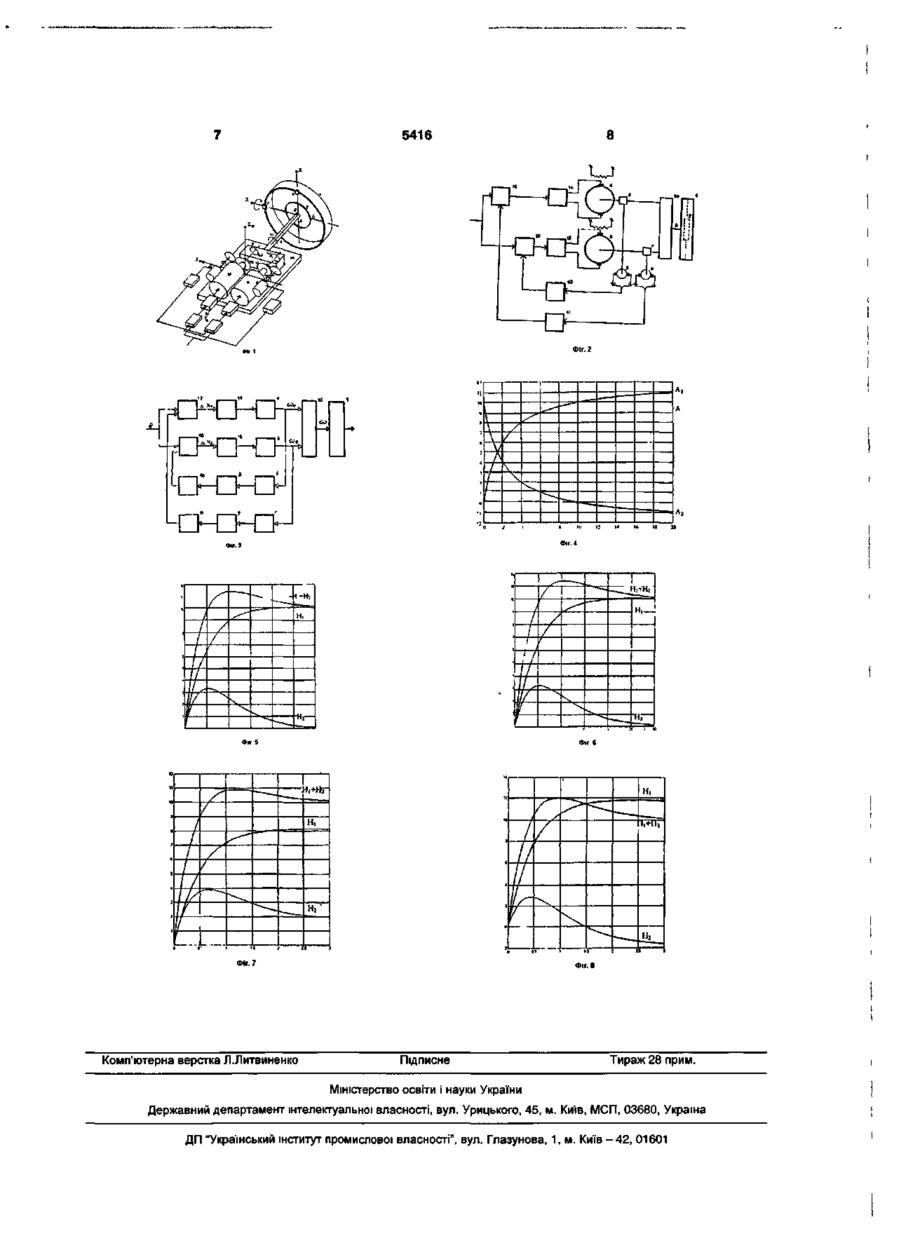
Динамічно настроюваний гіроскоп, що містить послідовно з'єднані ротор, пружний підвіс, вал та електропривід, який відрізняється тим, що він містить другий електропривід, причому вал першого електропривода через перший редуктор, перший тахогенератор і перший масштабний пере творювач підключений до другого входу другого суматора, вихід якого з'єднаний з входом другого підсилювача, з'єднаного з входом другого електропривода, вал другого електропривода через другий редуктор, другий тахогенератор і другий масштабний перетворювач підключений до другого входу першого суматора, вихід якого з'єднаний з входом першого підсилювача, вихід якого з'єднаний з входом першого електропривода, перші входи першого та другого суматорів об'єднані і утворюють електричний вхід системи, вали першого та другого електроприводів з'єднані з першим та другим входами механічного диференціала, вихід якого утворює вал обертання ротора гіроскопа. Корисна модель відноситься до галузі приладобудування і може бути використана для створення динамічно настроюваних гіроскопів (ДНГ). Відомий ДНГ, який одержує ротор, закріплений на осі обертання з допомогою пружного зв'язку, і електропривід (ЕП). Вся ця система обертається з постійною кутовою швидкістю [1]. Недоліком відомого ДНГ с залежність частоти обертання вала ЕП від параметричних збуджень ЕП. Причому, при малих параметричних збудженнях здійснюється зменшення гіроскопічного моменту і, як наслідок, зменшення формування кута, а при значних параметричних збудженнях може здійснитись зрив резонансної частоти і отже, динамічної настройки гіроскопа. Відомий ДНГ, який отримує ротор, розташований на валу ЕП з допомогою пружного підвісу, виконаного у вигляді торсіонів [2]. Недоліком відомого ДНГ є залежність значення формуючого кута від параметричних збуджень ЕП. Відомий ДНГ, який одержує ротор, який з допомогою пружного зв'язку, закріплений па валу, з'єднаного з ЕП [3], прототип. Недолік відомого ДНГ заключається в залежності частоти обертання вала від параметричних збуджень ЕП, що при відхиленні коефіцієнтів передаточної функції ЕП приводить до значних по милок передачі кута відхилення рамки гіроскопа. Це явище має особливе значення при використанні ДНГ на космічних апаратах тривалого використання. Задачею корисної моделі є підвищення точності формування частоти обертання вала ЕП при параметричних збудженнях передаточної функції (ПФ) ЕП і підвищення експлуатаційного ресурсу ДНГ. Поставлена задача вирішується таким чином, що в динамічно настроюваному гіроскопі який містить послідовно з'єднані ротор, пружній підвіс, вал та електропривід, новим є те, що ДНГ містить другий ЕП, причому, вал першого ЕП через перший редуктор, перший тахогенератор (ТГ) і перший масштабний перетворювач (МП) підключений до другого входу другого суматора, вихід якого з'єднаний з входом другого підсилювача, вихід якого з'єднаний з входом другого ЕП, вал другого ЕП через другий редуктор, другий ТГ і другий МП підключений до другого входу першого суматора, вихід якого з'єднаний з входом першого підсилювача, з'єднаного з входом першого ЕП, перші входи першого та другого суматорів об'єднані і утворююсь електричний вхід гіроскопа, вали першого та другого ЕП з'єднані з першим та другим входами диференціального механізму, вихідний вал якого являється валом ротора. (О і (s) _ кї(a 2 s +1 + k 2 p 2 ) Wi(8)= Ф) W2 (s) = a-|a2s (12) Ф) 1-а ПФ відтворює динамічні характеристики 1го канала, а 2-а ПФ динамічні характеристики 2-го канала. Спочатку розглянемо статичні параметри, які відтворюють значення частоти обертання валів 1го та 2-го ЕП в стаціонарному режимі. ( 1 3 ) Ахі . он де і і "^ ВІДПОВІДНО, сигнал на вході 1-го підсилювача 14 і частота обертання вала 1-го ЕП4; 1 р2 (2) Ax-|(s) і, 4 Згідно структурній схемі, Фіг.З будемо мати наступні рівняння статичний параметр 1-го канала статичний параметр 2-го канала Відповідно рівнянню (1), сумарний статичний параметр А буде відповідати наступному рівнянню статичний параметр 1-го канала; 1 - динамічний параметр 1-го канала. А ПФ 2-го канала буде -k 1 p 1 ) (15) Ax 2 (s) Ax? . coo d v a2s + 1 d . n ' де \ ВІДПОВІДНО, сигнал па вході 2-го підсилювача 15 і частота обертання вала 2-го ЕП5; 2 - статичний параметр 2-го канала; 2 - динамічний параметр 2-го канала. Дослідимо,, як веде себе параметр і, А при па 1 раметричних збудженнях коефіцієнта 1-го ЕП. Для цього задамо чисельні значення параметрів. Приклад 1 k 1 = k 2 = 1 0 ft =1,0 р 2 =0,5 Результати розрахунків наведені в таблиці 1 і показані на Фіг.4 5416 Таблиця 1 к і Аі А2 А 0 0 10 10 2 6 4 10 4 8 2 10 8 96 0.4 10 6 9 1 10 10 10 0 і 10 З таблиці 1 і Фіг.4 очевидно, що на кожне зменшення або збільшення к-| і, ВІДПОВІДНО значення А-| параметра 1-го канала від номінального значення А-| = 10 , параметр А2 збільшується або зменшується на таке значення, що параметр системи А залишається постійним. Це дозволяє стверджувати про існуючу властивість інваріантності рефлексивних систем відносно параметричних збуджень одного з каналів Ця властивість рефлексивних систем відносить їх до класу самоорганізуючих систем. Покажемо, що абсолютна похибка сумарного параметра передачі пропонованого технічного рішення менше, ніж в одноканальній системі (прототипі) при одночасному параметричному збудженні коефіцієнтів к-| і к2 Нехай к-| = к£ = 8. Тоді А-| = 9.523 , а А 2 = 0.381, А = 9 904 то абсолютна похибка системи буде АА = [(10 - 9.904) /10] 100 = 0.9% Таким чином, при похибці коефіцієнтів передачі в обох каналах на 20%, абсолютна похибка сумарного коефіцієнта складає лиш 0.9%, що свідчить про властивість "живучості" такої системи. Для побудови перехідних процесів в системі, ВІДПОВІДНО передаточним функціями (11)-(12) розглянемо розрахункові приклади В пропонованому ДНГ існує особистий режим досягнення стаціонарного режиму частоти обертання вала рамки гіроскопа Цей режим забезпечується при виконанні умови 1 (16) Тоді, рівняння (11)-(12) будуть мати вигляд (17) -| + Э2 )s +1 (18) •a2)sЗ цих рівнянь можна зробити висновок, що перше рівняння залишається в класі аперіодичних ланок, а друге рівняння переходить в клас диференціальних. Приклад 1 кі = к 2 =10 =06. Тоді WI(S) = W 2 (s) = (З-, = 1,0 , 6S + 10 0.3s*+1.1s+ 1 5s 2 0.3s +1.1s+ 1 р 2 = 0.01. 41916 2s + 1 а-| = 0 5 , 31.916 1 666s + 1 41.97 14.97 1-666S + 1 2s + 1 12 10.285 -0 285 10 14 105 -0.5 10 16 10 666 -0 666 10 18 10.8 -0.8 10 20 109 -0.9 10 Корені характеристичного рівняння 2 0.3s +1 1s + 1 = 0 будуть si = -2 , S2 = -1.666 Перехідні процеси, які відповідають цим передаточним функціям, мають вигляд H-|(t) = 10 + 31.916e~ 1 ' 6 6 6 t - 41 9 1 6 e " 2 t = 14.97(e~1666t-e*') = 10 + 31.916(e~ 1 ' 6 6 6 t -1.313e~ 2 t ) + 97(e~1'666t-e~2t) Перехідні процеси ВІДПОВІДНІ цим рівнянням приведені на Фіг 5 3 Фіг.5 очевидно, що стаціонарного режиму досягає 1 -й канал, а частота обертання 2-го канала, досягнув екстремального значення стає рівним нулю, і далі знаходиться в "черговому" режимі. На Фіг.6 приведені перехідні процеси при збільшених постійних часу а-| і а2 . При порушенні в процесі експлуатації ДНГ умови (16), внаслідок параметричних збуджень параметра к-| і 1-го канала, до формування частоти обертання підключається 2-й канал Так, на Фіг.7 приведені перехідні процеси, коли параметр А-| зменшився на 20% і стаціонарне значення H-j(t) досягає 8. Тоді 2-й канал, досягнувши екстремального значення, виходить на стаціонарний режим H2(t) = 2 , внаслідок чого частота обертання вала гіроскопа залишається незмінною H3(t) = 10. На Фіг.8 приведені перехідні процеси, коли параметр А-| зростав на 20%, внаслідок чого стаціонарне значення частоти обертання вала 1-го ЕП досягає H-|(t) = 12, a H2(t) = -2 Це означає, що обертання вала 2-го ЕП реверсується і H 3 (t) = 10 Таким чином пропонований ДНГ володіє більш високою точністю і внаслідок того що 2-й ЕП лиш компенсує відхилення частоти обертання, вала 1го ЕП від номінального значення збільшеним експлуатаційним ресурсом порівняно з прототипом Література 1. Одинцов Л. А Теория и расчет гироскопических приборов К., "Вища школа", 1985, с.279 2. Павловский М А. Теория гироскопов К., "Вища школа", 1986, с242. 3. Пельпор Д. С и др Динамически настраиваемые гироскопы. М., "Машиностроение", 1988, сб. 5416 • І , ^ — — д '\\ / :у л ; /\ / \ і і Ґ . і -H. 1 H, / I I 1 V •Hi— — H, / f і і // Ir r — Комп'ютерна верстка Л.Литвиненко /- . Hi 1 — — / Ш H, , / і і / \ , ¥\ / j ZL71 і I/ \/ / ' ~~ / ^— ~ V ПІ+ПГ \ . J і Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул. Глазунова, 1, м. Київ-42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDynamically adjustable gyroscope
Назва патенту російськоюДинамически настраиваемый гироскоп
МПК / Мітки
МПК: G01C 19/00, G01P 9/00
Мітки: гіроскоп, динамічної, настроюваний
Код посилання
<a href="https://ua.patents.su/4-5416-dinamichno-nastroyuvanijj-giroskop.html" target="_blank" rel="follow" title="База патентів України">Динамічно настроюваний гіроскоп</a>
Пристрій для динамічного настроювання динамічно настроювального гіроскопа
Номер патенту: 35016
Опубліковано: 15.03.2001
Автори: Янкелевич Григорій Євсійович, Мудренко Микола Дмитрович, Хазанович Леонід Борисович, Клименко Олексій Іванович, Галаган Олександр Андрійович, Осипов Віктор Петрович, Глазунов Іван Єгорович
МПК: G01C 19/56
Мітки: динамічного, настроювального, гіроскопа, пристрій, динамічної, настроювання
Формула / Реферат:
Пристрій для динамічного настроювання динамічно настроювального гіроскопа, який включає кардановий підвіс, елементи динамічного настроювання, ротор та електропривід обертання ротора, який відрізняється тим, що елементи динамічного настроювання розташовані в електроприводі обертання ротора, а як елементи динамічного настроювання застосовані дискретний формувач імпульсу з тривалістю еталонного періоду обертання ротора з регульованим...
Динамічно реконфігуруємий процесор
Номер патенту: 36719
Опубліковано: 16.04.2001
Автор: Сенякін Дмитро Олександрович
МПК: G06F 15/76
Мітки: динамічної, процесор, реконфігуруємий
Текст:
...коду системний ресурс 3 не запрограмований на роботу з контролером локальної мережі і не має ні яких додаткових вузлів обробки даних. Конфігурація системного ресурсу виконується програмно, шляхом запису в регістр керування селектора необхідного об'єкта конфігурації. Запис в регістр керування здійснюється за допомогою операції пересилки операнду в системний регістр керування. В процесі виконання такої команди апаратура ресурсу обробки...
Спосіб експресного контролю структурної досконалості монокристалів, що динамічно розсіюють
Номер патенту: 20094
Опубліковано: 25.12.1997
Автори: Гурєєв Анатолій Миколайович, Немошкаленко Володимир Володимирович, Кисловський Євген Миколайович, Кривицький Владислав Петрович, Оліховський Степан Йосипович, Когут Михайло Тихонович, Низкова Ганна Іванівна, Гаврилова Олена Миколаївна, Лось Андрій Вікторович, Молодкін Вадим Борисович
МПК: G01N 23/20
Мітки: досконалості, структурної, спосіб, експресного, монокристалів, розсіюють, динамічної, контролю
Формула / Реферат:
Способ экспрессного контроля структурного совершенства динамически рассеивающих монокристаллов, согласно которому исследуемый образец облучают пучком рентгеновского излучения, осуществляют брэгг-дифракцию, измеряют интегральную интенсивность отражения, поворачивают образец таким образом, чтобы реализовалось брэгг-отражение, характеризующееся тем же вектором дифракции, измеряют его интегральную интенсивность, рассчитывают по измеренным...
Спосіб контролю структурної досконалості динамічно розсіюючий монокристалів
Номер патенту: 3699
Опубліковано: 27.12.1994
Автори: Когут Михайло Тихонович, Курбаков Олександр Іванович, Молодкін Вадим Борисович, Ковальчук Михайло Валентинович, Сторижко Володимир Юхимович, Оліховський Степан Йосипович, Осиновський Максим Євгенович, Литвинов Юрій Михайлович, Гурєєв Микола Анатолійович, Полінур Олександр Вольфович, Гурєєв Анатолій Миколайович, Немошкаленко Володимир Володимирович, Кисловський Євген Миколайович, Низкова Ганна Іванівна, Кривицький Владислав Петрович
МПК: G01N 23/20
Мітки: досконалості, спосіб, динамічної, монокристалів, розсіюючий, структурної, контролю
Формула / Реферат:
Способ контроля структурного совершенства динамических рассеивающих монокристаллов, заключающийся в том, что исследуемый образец толщиной t облучают полихроматическим пучком рентгеновского излучения, осуществляют лауэ-дифракцию излучения длины волны t, выбранной из условия, налагаемого на производстве m (l)1, где m - коэффициент фотоэлектрического поглощения на определенной системе плоскостей, измеряют интегральные интенсивности JRH (l)...
Спосіб визначення структурної досконалості динамічно розсіюючих монокристалів
Номер патенту: 19220
Опубліковано: 25.12.1997
Автори: Шпак Анатолій Петрович, Оліховський Степан Йосифович, Бар'яхтар Віктор Григорович, Кшевецький Станіслав Антонович, Когут Михайло Тихонович, Низкова Ганна Іванівна, Немошкаленко Володимир Володимирович, Кисловський Євген Миколайович, Литвинов Юрій Михайлович, Гуреєв Микола Анатолійович, Ковальчук Михайло Валентинович, Осиновський Максим Євгенович, Поленур Олександр Вольфович, Остапчук Анатолій Іванович, Кривицький Владислав Петрович, Гуреєв Анатолій Миколайович, Бідник Дмитро Ілліч, Молодкін Вадим Борисович
МПК: G01N 23/20
Мітки: визначення, структурної, досконалості, динамічної, спосіб, розсіюючих, монокристалів
Формула / Реферат:
Способ определения структурного совершенства динамически рассеивающих монокристаллов, согласно котором исследуемый образец облучают полихроматическим пучком рентгеновского излучения и измеряют интегральную интенсивность рефлексов при дифракции излучения для двух положений при повороте образца и определяют статический фактор Дебая-Валлера Lн, отличающийся тем, что дифракцию излучения в обоих положениях образца осуществляют в геометрии Брэгга,...
Попередній патент: Верстат для розмірної обробки електричною дугою деталей складної конфігурації
Наступний патент: Калібратор фазових зсувів
Випадковий патент: Кільцевий кристалізатор для безперервного лиття