Рлс виявлення гвинтових літаків та гелікоптерів
Номер патенту: 24427
Опубліковано: 17.07.1998
Автори: Феньов Дмитро Васильйович, Касаткін Леонід Веніамінович, Рогов Петро Дмитрович
Формула / Реферат
РЛС обнаружения винтовых самолетов и вертолетов, содержащая импульсный передатчик СВЧ, включающий импульсный модулятор и генератор зондирующих когерентных СВЧ радиоимпульсов, приемное устройство, включающее смеситель, усилитель отраженных сигналов с полосой пропускания, равной интервалу доплеровских частот, соответствующих интервалу измеряемых скоростей цепи, гребенчатый фильтр для определения скорости цели и индикаторы дальности и скорости цели, антенную систему, к которой присоединены приемное и передающее устройства, отличающаяся тем, что импульсный передатчик СВЧ и гетеродин приемника выполнены с длительностями импульсов, периодически изменяющимися в пределах от tmax = 2rmax/c, где rmax - максимальная дальность действия до tmin = 2rmin/c, где rmin - минимальная дальность действия РЛС, на выходе усилителя отраженных сигналов устанавливаются системы амплитудных детекторов и узкополосных фильтров, полосы пропускания которых соответствуют полосам частот амплитудной модуляции отраженного сигнала, характеризующих лоцируемую цель, отфильтрованный сигнал усиливается и индицируется и при этом дальность до цели определяется как
где t°и(n) и t°и(n+1) два следующих друг за другом, при временном изменении t(t), значения длительностей зондирующего импульса, при которых амплитуда сигнала на входе гребенки фильтров и системы узкополосных фильтров достигает максимальных значений Anmax, A(n+1)max или, при Q = 2, минимальных значений Anmin, A(n+i)min, Vr - радиальная составляющая скорости цели, a = dt/dt - скорость изменения длительности импульсов передатчика и гетеродина приемника, Q - скважность импульсов зондирующего сигнала.
Текст
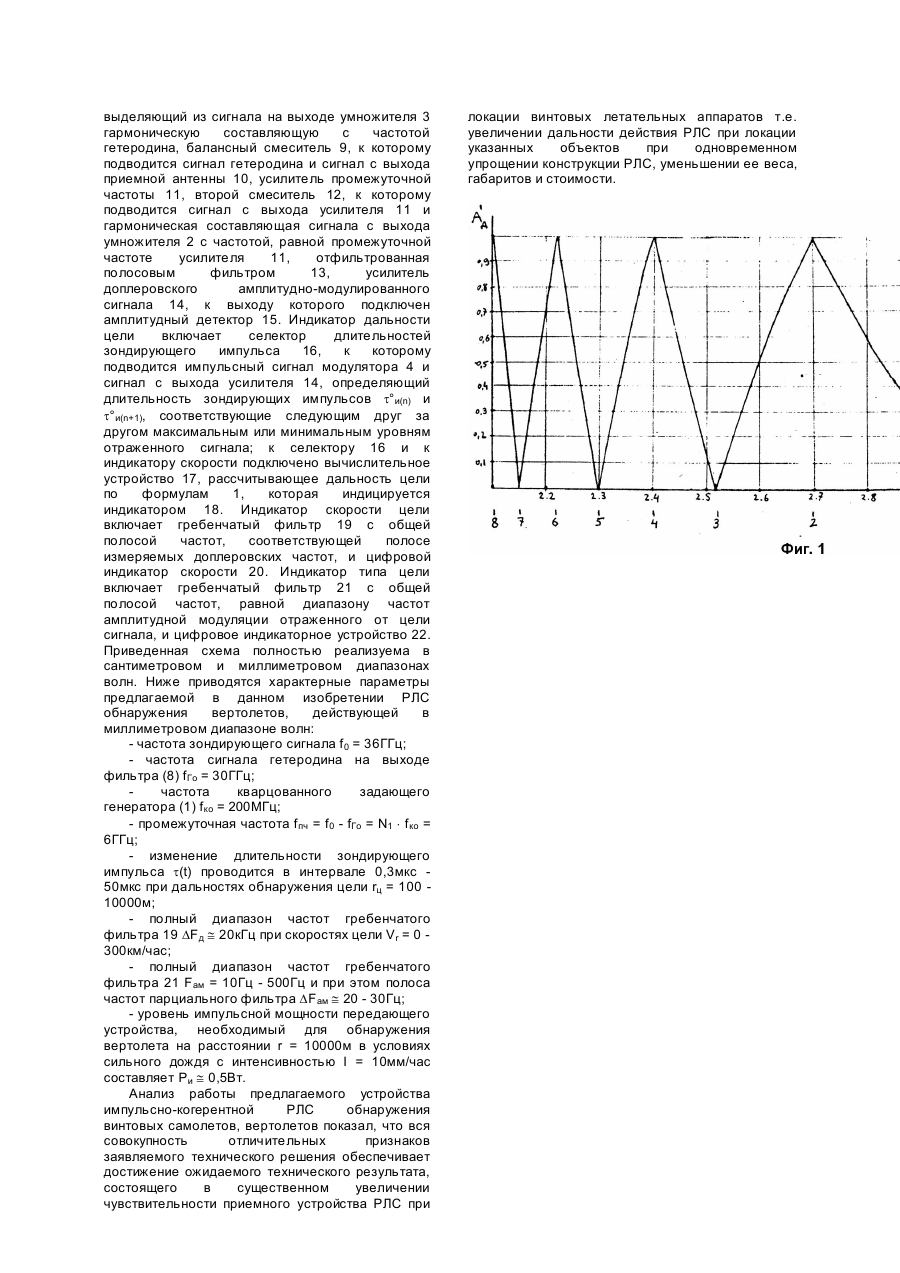
Изобретение относится к радиолокационной технике, а точнее к радиолокационным системам обнаружения винтовых летательных аппаратов, таких как самолеты, вертолеты. Данное изобретение найдет широкое применение в диспетчерской аэродромной службе, в различных родах войск. Известно большое многообразие РЛС, предназначенных для обнаружения и определения скорости и координат летящих объектов, в том числе винтовых самолетов, вертолетов (Справочник по радиолокации / Под ред. М. Сколника. - Т.1. - М.: Сов. радио, 1976. 455с.; Ширман Я.Д. Теоретические основы радиолокации. - М.: Сов. радио, 1970. - 560с.). Известные РЛС используют различные принципы построения, основанные на импульсной модуляции, фазовой манипуляции, частотной модуляции сигнала передающего устройства. Во всех известных системах расстояние до цели определяется измерением времени запаздывания зондирующего импульса tц = 2r/c (r - расстояние до цели), угловые координаты цели определяются применением антенных систем с высокой направленностью, скорость определяется измерением доплеровской поправки частоты. Высокая чувствительность приемного устройства, необходимая для обеспечения требуемой дальности действия РЛС, обеспечивается методами оптимальной фильтрации, эквивалентной в конечном итоге уменьшению эффективной полосы пропускания частот в приемном тракте. При этом в известных РЛС амплитудные флуктуации отраженного от цепи сигнала значительно ухудшают характеристики качества (вероятность обнаружения и вероятность пропуска цели), что приводит к необходимости увеличения отношения энергии сигнала к шуму [2], [3]. Особенности характеристик амплитудных флуктуации различных целей не учитываются при приеме слабых отраженных сигналов, а требуемое увеличение отношения сигнал/шум достигается соответствующим увеличением мощности передатчика и снижением шумов приемного устройства. При этом известные РЛС обнаруживают летящие объекты различных классов, однако, ценой увеличения их конструктивной сложности, габаритов и стоимости. Задача распознавания образа цели в известных радиолокационных системах специально не ставится и обычно суждение о типе летящего аппарата производится лишь на основании опыта эксплуатации РЛС. Из известных решений наиболее близким по технической сущности к заявляемому (прототипом) является РЛС с СДЦ с дискретными фильтрами для определения скорости цели (Финкельштейн М.И. Основы радиолокации. - М.: Сов. радио, 1973. - 495с.). Известные схемы этого класса характеризуются пропусканием широкого спектра частот сигнала, что сохраняет его импульсную структуру и позволяет определить дальность цели по временному положению отраженного импульса. Скорость определяется при использовании гребенчатого фильтра, общая полоса которого определяется диапазоном измеряемых радиальных скоростей Vr, т.е. диапазоном доплеровских частот Fд = 2f 0Vr/c, где f 0 - несущая частота зондирующего сигнала, c скорость света, а полосы частот парциальных фильтров Dfдi определяются требуемой разрешающей способностью по скорости. Получение информации о дальности цели в конструкции-прототипе достигается при использовании одноканальных либо многоканальных селекторов дальности. В одноканальных системах поиск цели осуществляется путем изменения запаздывания селекторного импульса, отпирающего селектор дальности. При этом время запаздывания селекторного импульса изменяется в пределах от tmin = 2rmin/c до tmax = 2rmax/c. Такой поиск цели требует значительного времени и в связи с этим применяют многоканальные системы. В этих системах селекторы дальности отпираются стробимпульсами длительностью tс = tи, где tи длительность зондирующего импульса. Необходимое число каналов уменьшают за счет разрешающей способности, т.е. увеличения длительности строба tс > tи. В связи с тем, что период повторения T зондирующих импульсов в РЛС-прототипе удовлетворяет условию T > 2rmax/c, а tи < 2Dr/c, где Dr - разрешающая способность по дальности, скважность импульсного зондирующего сигнала Q = T/tи оказывается значительной, что приводит к существенной потере энергии отфильтрованного доплеровского сигнала. В связи с этим до фильтра доплеровских частот устанавливается расширитель импульсов до величин T на выходе которого сигнал преобразуется в непрерывный, сохраняющий информацию о скорости цели, но теряющий информацию о ее дальности. Для разрешения целей по скорости гребенки узкополосных фильтров доплеровских частот устанавливаются после каждого i - го селектора дальности. Селекция сигналов движущихся целей обеспечивается применением череспериодной компенсации с использованием систем задержек импульсного сигнала на время t3 = T и вычитающих устройств. С учетом широкой полосы частот приемного устройства требуемый энергопотенциал РЛС достигается увеличением уровня мощности передающего устройства, применением методов оптимальной фильтрации для увеличения чувствительности приемника. При этом амплитудная модуляция отраженного сигнала приводит к необходимости увеличения отношения сигнал/шум. Можно видеть, что РЛСпрототип характеризуется значительной сложностью построения, высоким уровнем импульсной мощности передающего устройства, высокой чувствительностью приемника с полосой частот, обеспечивающей прохождение отраженных от цели импульсов малой длительности. В результате известные системы отличаются значительными габаритами, весами и высокой стоимостью. Предлагаемое изобретение направлено на совершенствование когерентно-импульсных РЛС обнаружения самолетов и вертолетов путем нового выполнения импульсного СВЧ-передатчика, системы обработки информации и индикации сигнала, введения новых дополнительных узлов в структурную схему РЛС, что позволяет существенно уменьшить эффективную полосу пропускания приемного устройства, т.е. при заданной дальности действия РЛС уменьшить требуемый энергопотенциал и в результате уменьшить габариты, вес и стоимость РЛС. Заявленный технический результат достигается тем, что в РЛС обнаружения самолетов, вертолетов, содержащей импульсный передатчик СВЧ, включающий импульсный модулятор и генератор зондирующих когерентных радиоимпульсов, приемное устройство, включающее смеситель, усилитель отраженных сигналов с полосой пропускания равной интервалу доплеровских частот, соответствующих интервалу измеряемых скоростей цели, гребенчатый фильтр для определения скорости цели и индикаторы, дальности и скорости цели, антенную систему, к которой присоединены приемное и передающее устройства, импульсный передатчик СВЧ и гетеродин приемника выполнены с длительностью импульсов, периодически изменяющихся в пределах от tmax = 2rmax/c, где tmax - максимальная дальность действия, до tmin = 2rmin/c, где rmin минимальная дальность действия РЛС, на выходе усилителя отраженных сигналов устанавливаются системы амплитудных детекторов и узкополосных фильтров, полосы пропускания которых соответствуют полосам частот амплитудной модуляции отраженного сигнала, характеризующих лоцируемую цель, отфильтрованный сигнал усиливается и индицируется и при этом дальность до цели определяется как где t°и(n) и t°и(n+1) два следующих друг за другом, при временном изменении tи(t), значения длительностей зондирующего импульса, при которых амплитуда сигнала на входе гребенки фильтров и системы узкополосных фильтров достигает максимальных значений Anmax, A(n+1)max или, при Q = 2, минимальных значений Anmin, A(n+1)min, Vr - радиальная составляющая, скорости цели, a = dt/dt - скорость изменения длительностей импульсов передатчика и гетеродина приемника, Q - скважность импульсов зондирующего сигнала. Новые признаки, которыми обладает заявляемое техническое решение, а именно: - выполнение передатчика СВЧ и гетеродина приемника с длительностями импульсов, периодически изменяющимися в пределах от tmax = 2rmax/c до tmin = 2rmin/c, где tmax и rmin максимальная и минимальная дальность РЛС соответственно; - установка на выходе усилителя отраженных сигналов дополнительных систем амплитудных детекторов и узкополосных фильтров, полосы пропускания которых соответствуют полосам частот амплитудной модуляции отраженного сигнала, характеризующих лоцируемую цель; введение в приемно-индикаторное устройство РЛС дополнительных блоков, а именно блока индикации максимальных и минимальных уровней сигнала на входе гребенки фильтров и систем амплитудных детекторов и узкополосных фильтров, измерителей длительностей зондирующего импульса, соответствующих этим максимальным и минимальным значениям, вычислительного устройства, производящего вычисление дальности цели по формулам (1), обеспечивают соответствие заявляемого изобретения критерию "новизна". Эти признаки позволяют получить ожидаемый технический результат, состоящий в существенном увеличении чувствительности приемного устройства РЛС при локации винтовых летательных аппаратов (вертолетов, самолетов) т.е. увеличении дальности РЛС при локации указанных объектов при одновременном упрощении конструкции РЛС, уменьшении ее габаритов, веса, стоимости, что поясняется следующим образом. Полоса пропускания приемного устройства в предлагаемой конструкции в блоке определения скорости цели равна интервалу доплеровских частот, соответствующих интервалу измеряемых скоростей цели, а полосы пропускания парциальных фильтров, входящих в гребенчатый фильтр определяются требуемым разрешением РЛС по скорости; с учетом реальных требований к определению скоростей винтовых летательных аппаратов общая полоса усиливаемых доплеровских частот лежит в интервале Fд = 0 25кГц, а полосы парциальных фильтров гребенки DFдi составляют десятки - сотни Гц. В блоке распознавания винтового летательного аппарата общая полоса пропускания равна диапазону частот амплитудной модуляции отраженного сигнала, вызванной вращением винта самолета, вертолета. Указанные частоты лежат в полосе десятки-сотни Гц, в то время, как пики в спектральном распределении частот амплитудной модуляции отраженного сигнала имеют полосы 10 - 30Гц и в связи с этим, система узкополосных фильтров, установленная после усилителя сигналов, характеризуется общей полосой пропускания 100 - 300Гц, а полосы отдельных фильтров этой системы Df ai @ 10 - 30Гц. Указанные полосы пропускания в блоках определения скорости и распознавания цели достаточны для выполнения функций указанных блоков, однако, совершенно недостаточны для реализации традиционных методов определения дальности цели в импульсной радиолокации. В данном предлагаемом изобретении измерение дальности цели производится применением периодического изменения длительности зондирующего импульса tи(t), регистрацией следующих друг за другом, по крайней мере двух значений длительностей импульса t°и(n) и t°и(n+1), ПРИ которых амплитуда сигнала на входе гребенки фильтров и системы узкополосных фильтров достигает максимальных значений Anmax, A(n+1)max или минимальных значений Anmin, A(n+1)min. Максимальный уровень сигнала доплеровской частоты на входе гребенки фильтров и максимальный уровень сигнала с частотой амплитудной модуляции на входе системы узкополосных фильтров достигается при выполнении условия минимальный уровень сигнала достигается при выполнении условия По результатам измерений значений t°и(n), t°и(n+1) однозначно определяется дальность цели в соответствии с формулами (1). На фиг.1 приведена расчетная зависимость относительной амплитуды сигнала доплеровской частоты A2'(и) при скважности Q = T/tи = 2, при времени запаздывания сигнала tц = 1мкс. Можно видеть, что в соответствии с (2), (3) выполняются условия максимальной и минимальной чувствительности приемника при tц = 2ntи и tц = (2n + 1)tи соответственно. Значения n приведены на оси абсцисс фиг.1. Знания двух следующих друг за другом, при любых значениях n, величин t°и, соответствующих максимальным Amax или минимальным Amin уровням сигнала на входе гребенки фильтров и системы узкополосных фильтров, достаточно для однозначного определения дальности цели по соотношениям (1). Таким образом, создание импульсного передатчика СВЧ и гетеродина приемника с периодически изменяющимися длительностями импульса, предлагаемое нами, обеспечивает решение задачи определения дальности цели при использовании доплеровских принципов построения РЛС при эффективной полосе пропускания приемного устройства, соответствующей полосе доплеровских частот. Выигрыш в чувствительности приемного устройства РЛС по сравнению с известными системами, в которых для определения дальности необходимо с минимальными искажениями пропускать в приемном устройстве зондирующий импульс, составляет несколько порядков. По сравнению с прототипом нашего изобретения РЛС с селекцией движущихся целей, использующей методы оптимальной фильтрации в приемном устройстве для увеличения чувствительности и методы череспериодной компенсации для селекции движущихся целей, предлагаемое техническое решение обеспечивает высокую чувствительность приемника РЛС с селекцией движущихся целей при существенном упрощении конструкции, уменьшении габаритов, веса и стоимости. Дальнейшее существенное увеличение чувствительности приемного устройства в предлагаемом нами изобретении достигается установкой после усилителя сигналов системы амплитудных детекторов и системы узкополосных фильтров, полосы пропускания которых соответствуют полосам частот амплитудной модуляции отраженного сигнала, характеризующих лоцируемую цель. В соответствии с известными результатами спектрального анализа "амплитудного шума" отраженного сигнала от винтовых самолетов [1] ширина областей пиков спектральной плотности не превышает 20 - 30Гц; аналогичное положение имеет место и в спектрах "амплитудного шума" отраженного сигнала от вертолетов. Таким образом, при локации вертолетов и винтовых самолетов по уровню сигнала амплитудной модуляции на выходе системы узкополосных фильтров, как предлагается в нашем изобретении, обеспечивается дополнительный существенный выигрыш чувствительности приемного устройства РЛС. Следует указать, что при этом достигается дополнительная возможность распознавания образа цели, а также характера ее маневров. Из сказанного следует: В предлагаемой конструкции РЛС обнаружения винтовых самолетов измерение дальности цели обеспечивается введением новых существенных признаков, сводящихся к созданию импульсных когерентных передатчика и гетеродина приемника с изменяющейся длительностью зондирующего и гетеродинного импульсов по периодическому закону, введению в схему и конструкцию РЛС новых блоков определения максимальных и минимальных значений амплитуд сигналов на выходе гребенчатых фильтров и системы узкополосных фильтров и соответствующих им длительностей зондирующего импульса, введению нового блока цифровой обработки, производящего расчет дальности по предлагаемой нами формуле. В предлагаемой конструкции РЛС увеличение чувствительности приемного устройства, что эквивалентно увеличению дальности действия, снижению требуемого уровня мощности передающего устройства, достигается существенным сужением полосы пропускания частот в приемном устройстве благодаря применению усилителя отраженных сигналов с полосой усиления, определяемой диапазоном доплеровских частот и введению новых систем амплитудного детектирования и узкополосных фильтров, полосы пропускания которых соответствуют полосам частот амплитудной модуляции отраженного сигнала. Достижение новых технических характеристик обнаружения винтовых самолетов, вертолетов, а именно, точное определение дальности и скорости цели при минимальной полосе пропускания приемного устройства, обеспечивается при минимальных габаритах РЛС, что связано с увеличением чувствительности приемника, снижением требований к уровню излучаемой мощности и к уровню энергопотребления, применением новых принципов определения дальности цели. Заявляемое изобретение соответствует критерию "изобретательский уровень" в связи с тем, что все отличительные признаки в совокупности не обнаружены в составе другого объекта. На фиг.1 показана расчетная зависимость относительной амплитуды сигнала доплеровской частоты A2'(t) в функции длительности зондирующего импульса при времени запаздывания tц = 2r/c = 1мкс; на фиг.2 структурная схема примера конкретного выполнения предложенной конструкции РЛС. Структурная схема РЛС обнаружения винтовых самолетов, вертолетов, выполненная в соответствии сданным изобретением, включает импульсный высокостабильный, когерентный передатчик СВЧ, приемное устройство, индикаторы скорости, дальности, типа цели, передающую и приемную антенные системы. Передающее устройство включает кварцевый задающий генератор непрерывного действия 1, работающий на частоте f ко, транзисторноваракторный умножитель частоты в N1 раз 2, СВЧумножитель частоты на лавиннорезонансном диоде 3, работающий в импульсном режиме при подведении к нему импульсного модулирующего напряжения с изменяющейся длительностью импульса tи(t) по периодическому закону от модулятора 4, умножающий частоту сигнала на выходе 3 в N2 раз, полосовой фильтр 5, усилитель зондирующих импульсов 6. Передающее устройство подключено к излучающей антенне 7. Приемное устройство включает фильтр 8, выделяющий из сигнала на выходе умножителя 3 гармоническую составляющую с частотой гетеродина, балансный смеситель 9, к которому подводится сигнал гетеродина и сигнал с выхода приемной антенны 10, усилитель промежуточной частоты 11, второй смеситель 12, к которому подводится сигнал с выхода усилителя 11 и гармоническая составляющая сигнала с выхода умножителя 2 с частотой, равной промежуточной частоте усилителя 11, отфильтрованная полосовым фильтром 13, усилитель доплеровского амплитудно-модулированного сигнала 14, к выходу которого подключен амплитудный детектор 15. Индикатор дальности цели включает селектор длительностей зондирующего импульса 16, к которому подводится импульсный сигнал модулятора 4 и сигнал с выхода усилителя 14, определяющий длительность зондирующих импульсов t°и(n) и t°и(n+1), соответствующие следующим друг за другом максимальным или минимальным уровням отраженного сигнала;к селектору 16 и к индикатору скорости подключено вычислительное устройство 17, рассчитывающее дальность цели по формулам 1, которая индицируется индикатором 18. Индикатор скорости цели включает гребенчатый фильтр 19 с общей полосой частот, соответствующей полосе измеряемых доплеровских частот, и цифровой индикатор скорости 20. Индикатор типа цели включает гребенчатый фильтр 21 с общей полосой частот, равной диапазону частот амплитудной модуляции отраженного от цели сигнала, и цифровое индикаторное устройство 22. Приведенная схема полностью реализуема в сантиметровом и миллиметровом диапазонах волн. Ниже приводятся характерные параметры предлагаемой в данном изобретении РЛС обнаружения вертолетов, действующей в миллиметровом диапазоне волн: - частота зондирующего сигнала f 0 = 36ГГц; - частота сигнала гетеродина на выходе фильтра (8) f Го = 30ГГц; частота кварцованного задающего генератора (1) f ко = 200МГц; - промежуточная частота f пч = f 0 - fГо = N1 × f ко = 6ГГц; - изменение длительности зондирующего импульса t(t) проводится в интервале 0,3мкс 50мкс при дальностях обнаружения цели rц = 100 10000м; - полный диапазон частот гребенчатого фильтра 19 DFд @ 20кГц при скоростях цели Vr = 0 300км/час; - полный диапазон частот гребенчатого фильтра 21 Fам = 10Гц - 500Гц и при этом полоса частот парциального фильтра DFам @ 20 - 30Гц; - уровень импульсной мощности передающего устройства, необходимый для обнаружения вертолета на расстоянии r = 10000м в условиях сильного дождя с интенсивностью I = 10мм/час составляет Pи @ 0,5Вт. Анализ работы предлагаемого устройства импульсно-когерентной РЛС обнаружения винтовых самолетов, вертолетов показал, что вся совокупность отличительных признаков заявляемого технического решения обеспечивает достижение ожидаемого технического результата, состоящего в существенном увеличении чувствительности приемного устройства РЛС при локации винтовых летательных аппаратов т.е. увеличении дальности действия РЛС при локации указанных объектов при одновременном упрощении конструкции РЛС, уменьшении ее веса, габаритов и стоимости.
ДивитисяДодаткова інформація
Автори англійськоюRohov Petro Dmytrovych
Автори російськоюРогов Петр Дмитриевич
МПК / Мітки
МПК: G01S 13/00
Мітки: гелікоптерів, літаків, рлс, виявлення, гвинтових
Код посилання
<a href="https://ua.patents.su/5-24427-rls-viyavlennya-gvintovikh-litakiv-ta-gelikopteriv.html" target="_blank" rel="follow" title="База патентів України">Рлс виявлення гвинтових літаків та гелікоптерів</a>
Спосіб виявлення цілей
Номер патенту: 22432
Опубліковано: 03.03.1998
Автор: Слюсар Вадим Іванович
МПК: G01S 13/00
Мітки: виявлення, спосіб, цілей
Формула / Реферат:
1. Способ обнаружения целей, заключающийся в том, что излучают зондирующие импульсные сигналы, принимают отраженные сигналы, усиливают, производят их аналого-цифровое преобразование, осуществляют суммирование оцифрованных напряжений сигналов, запоминают результаты суммирования, осуществляют их межпериодную обработку, например, путем дискретного преобразования Фурье (ДПФ), производят обнаружение целей по откликам синтезированных частотных...
Секвентний радіолокаційний дальномір
Номер патенту: 17456
Опубліковано: 06.05.1997
Автори: Родін Олександр Валерійович, Жуков Сергій Анатолійович, Бахвалов Борис Миколайович
МПК: G01S 17/06
Мітки: радіолокаційний, секвентний, дальномір
Формула / Реферат:
Секвентный радиолокационный дальномер, содержащий приемо-передающую антенну с антенным переключателем, передатчик, приемник и индикатор дальности, отличающийся тем, что передатчик выполнен из двух генераторов периодических видеоимпульсов наносекундной длительности без несущей частоты, а частоты следования видеоимпульсов этих генераторов связаны соотношением F2-F1 < c/2rm, вторые выходы генераторов передатчика связаны со смесителем сигналов...
Вимірювач швидкості цілі для секвентного радіолокатора
Номер патенту: 17465
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: цілі, швидкості, вимірювач, радіолокатора, секвентного
Формула / Реферат:
Измеритель скорости цели для секвентного радиолокатора, содержащий передатчик, антенну с антенным переключателем, приемник и смеситель зондирующих и эхо-сигналов, отличающийся тем, что передатчик, антенна и приемник выполнены для несинусоидальных периодических импульсных сигналов с частотой следования импульсов F больше максимальной допплеровской частоты сигнала на верхней частоте полосы пропускания антенны, смеситель выполнен по мостовой...
Секвентний радіолокатор для виявлення маловисотної цілі
Номер патенту: 17461
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: маловисотної, виявлення, радіолокатор, цілі, секвентний
Формула / Реферат:
Секвентный радиолокатор для обнаружения маловысотной цели, содержащий передатчик видеоимпульсов поля радиоволн наносекундной длительности без несущей частоты, приемо-передающую антенну с антенным переключателем, приемник и индикатор, отличающийся тем, что в состав радиолокатора дополнительно включен наземный пеленгатор бортового источника радиоизлучения цели по углу места q со своей антенной системой, на выходе приемника радиолокатора...
Бортовий секвентний радіолокатор виявлення об’єктів поблизу земної поверхні
Номер патенту: 17471
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: поверхні, об'єктів, радіолокатор, земної, секвентний, поблизу, бортовий, виявлення
Формула / Реферат:
Бортовой секвентный радиолокатор обнаружения объектов вблизи земной поверхности, содержащий приемо-передающую антенну с антенным переключателем, приемник и передатчик несинусоидальных сигналов в виде периодических прямоугольных видеоимпульсов наносекундной длительности с высокой частотой следования импульсов отличающийся тем, что на выходе приемника установлен полосовой фильтр с полосой пропускания от нижней частоты равной до верхней...
Попередній патент: Склад інгредієнтів для сухого сніданку
Наступний патент: Пристрій для розрізання листового паперового матеріалу
Випадковий патент: Насадка для пляшки