Гіроскопічна система керування кутовим станом космічного літального апарата
Номер патенту: 24489
Опубліковано: 10.07.2007
Автори: Гордін Олександр Григорович, Великородня Юлія Сергіївна, Дибська Ирина Юріївна

Формула / Реферат
1. Гіроскопічна система керування кутовим станом космічного літального апарата, яка містить по кожній осі ортогональної системи координат, зв'язаної з корпусом, триступеневий силовий гіроскоп змінної структури, що дозволяє трансформувати його в двоступеневий силовий гіроскоп, аретуючий пристрій на зовнішній рамі гіроскопа, датчик моменту та демпфіруючий пристрій на осі підвісу внутрішньої рами, яка відрізняється тим, що по кожній осі ортогональної системи координат, зв'язаної з корпусом, встановлено аналогічний триступеневий силовий гіроскоп змінної структури з аретуючим пристроєм на зовнішній рамі і датчиком моменту та демпфіруючим пристроєм наосі підвісу внутрішньої рами, причому осі підвісу зовнішніх рам обох силових гіроскопів є колінеарними одна одній, на осях підвісу внутрішніх рам обох силових гіроскопів додатково розміщені датчики кутів повороту рам, а на осях підвісу зовнішніх рам - двигуни-маховики, статори яких жорстко з'єднані з осями підвісу зовнішніх рам силових гіроскопів.
2. Гіроскопічна система керування кутовим станом космічного літального апарата за п. 1, яка відрізняється тим, що в її структуру введена схема керування силовими гіроскопами, яка містить датчик кута на осі підвісу внутрішньої рами кожного силового гіроскопа, первинні перетворювачі інформації, підсилювально-логічні пристрої, пристрої керування аретирами, пристрої керування двигунами-маховиками, причому датчик кута першого силового гіроскопа з'єднаний із входом першого первинного перетворювача інформації, вихід якого з'єднаний із входом першого підсилювально-логічного пристрою, виходи якого з'єднані із входами: першим першого пристрою керування першим аретиром, першим першого пристрою керування першим двигуном-маховиком, першим другого пристрою керування другим аретиром, першим другого пристрою керування другим двигуном-маховиком, вихід першого пристрою керування першим аретиром з'єднаний із входом першого аретира, вихід першого пристрою керування першим двигуном-маховиком з'єднаний із входом першого двигуна-маховика, датчик кута другого силового гіроскопа з'єднаний із входом другого первинного перетворювача інформації, вихід якого з'єднаний із входом другого підсилювально-логічного пристрою, виходи якого з'єднані із входами: другим першого пристрою керування першим аретиром, другим першого пристрою керування першим двигуном-маховиком, другим другого пристрою керування другим аретиром, другим другого пристрою керування другим двигуном-маховиком, вихід другого пристрою керування другим аретиром з'єднаний із входом другого аретира, вихід другого пристрою керування другим двигуном-маховиком з'єднаний зі входом другого двигуна-маховика.
Текст
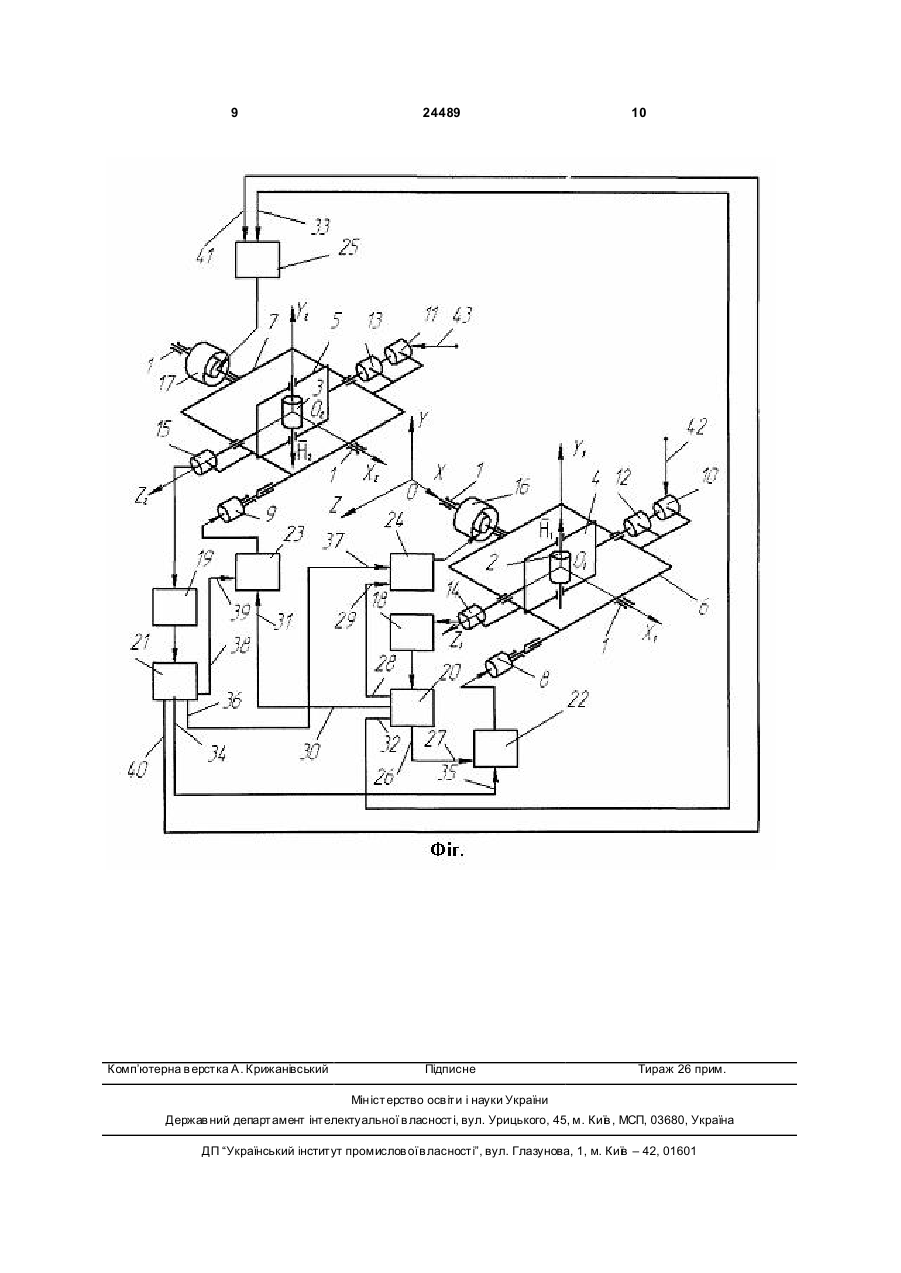
1. Гіроскопічна система керування кутовим станом космічного літального апарата, яка містить по кожній осі ортогональної системи координат, зв'язаної з корпусом, триступеневий силовий гіроскоп змінної структури, що дозволяє трансформувати його в двоступеневий силовий гіроскоп, аретуючий пристрій на зовнішній рамі гіроскопа, датчик моменту та демпфіруючий пристрій на осі підвісу вн утрішньої рами, яка відрізняється тим, що по кожній осі ортогональної системи координат, зв'язаної з корпусом, встановлено аналогічний триступеневий силовий гіроскоп змінної структури з аретуючим пристроєм на зовнішній рамі і датчиком моменту та демпфіруючим пристроєм на осі підвісу внутрішньої рами, причому осі підвісу зовнішніх рам обох силових гіроскопів є колінеарними одна одній, на осях підвісу вн утрішні х рам обох силових гіроскопів додатково розміщені датчики кутів повороту рам, а на осях підвісу зовнішніх рам - двигуни-маховики, статори яких жорстко з'єднані з осями підвісу зовнішніх рам силових гіроскопів. 2. Гіроскопічна система керування кутовим станом космічного літального апарата за п. 1, яка відрізняється тим, що в її структур у введена схема ке U 2 (11) 1 3 24489 4 створювати за допомогою газодинамічних реактинішніх рам обох силових гіроскопів є колінеарними вних двигунів як керуючих засобів. Але при цьому одна одній, на осях підвісу вн утрішні х рам обох витрачається запас рідких компонентів палива, які силових гіроскопів додатково розміщені датчики необхідні для роботи двигунів орбітального керукутів повороту рам, а на осях підвісу зовнішніх рам вання. Окрім цього тільки двохступеневі силові -двигуни-маховики, статори яких жорстко з'єднані з гіроскопи здатні парацювати в пасивному (напівосями підвісу зовнішніх рам силових гіроскопів. пасивному) режимі стабілізації, а двигуниРішення поставленої задачі досягається також маховики і трьохступеневі гіроскопи потребують тим, що в стр уктуру гіроскопічної системи керувикористання активної системи стабілізації - вимівання кутовим станом космічного літального апарювальних засобів, обчислювального та перетвората введена схема керування силовими гіроскорюючих пристроїв та виконуючих органів. пами, яка містить датчик кута на осі підвісу В якості прототипа використовується гіроскопівнутрішньої рами кожного силового гіроскопа, перчна система кутової стабілізації космічного літальвинні перетворювачі інформації, підсилювальноного апарата, яка містить по кожній осі ортогоналогічні пристрої, пристрої керування аретирами, льної системи координат, зв'язаної з корпусом, пристрої керування двигунами-маховиками, притрьохступеневий силовий гіроскоп змінної структучому датчик кута першого силового гіроскопа з'єдри, що дозволяє трансформувати його в двохстунаний з входом першого первинного перетворюпеневий силовий гіроскоп, аретуючий пристій на вача інформації, вихід якого з'єднанний з входом зовнішній рамі гіроскопа, датчик моменту та демпершого підсилювально-логічного пристрою, вихопфуючий пристрій на осі підвісу внутрішньої рами ди якого з'єднані з входами: першим першого при[Каргу Л.И. Системы угловой стабилизации космистрою керування першим аретиром, першим перческих аппаратов. М.: Машиностроение, 1980, с. шого пристрою керування першим двигуном78, 79, 106]. маховиком, першим другого пристрою керування Недоліком подібної системи є наявність режидругим аретиром, першим другого пристрою керуму насичення: граничний поворот відносно стану, вання другим двигуном-маховиком, вихід першого коли осі підвісу силового гіроскопа взаємноортогопристрою керування першим аретиром з'єднаний з нальні, внутрішньої рами для обох стр уктур входом першого аретира, вихід першого пристрою двохступеневого або трьохступеневого силового керування першим двигуном-маховиком з'єднаний гіроскопа. З'являється необхідність переходу сисз входом першого двигуна-маховика, датчик кута теми керування на газодинамічні реактивні двигудругого силового гіроскопа з'єднаний зі входом ни, що обумовлює значні витрати пального для другого первинного перетворювача інформації, реактивних двигунів, яке вкрай необхідне для кевихід якого з'єднаний з входом другого підсилюварування орбітальним рухом космічного літального льно-логічного пристрою, виходи якого з'єднані з апарата. Окрім того для схеми з трьохступеневими входами: другим першого пристрою керування силовими гіроскопами є необхідним використання першим аретиром, другим першого пристрою керегулятора активної системи керування кутовим рування першим двигуном-маховиком, другим друстаном космічного літального апарата і датчиків гого пристрою керування другим двигуноммоменту на осях підвісу зовнішніх рам, здатних маховиком, вихід другого пристрою керування друрозвивати великі моменти. гим аретиром з'єднаний з входом другого аретира, Задачею корисної моделі є виключення з провихід др угого пристрою керування другим двигуцесу керування газодинамічних реактивних двигуном-маховиком з'єднаний з входом другого двигунів, які потребують рідке паливо для роботи, з на маховика. процесу керування кутовим станом космічного На фігурі наведена спрощена кінематичнолітального апарата при дії на нього будь-яких збуфункціональна схема гіроскопічної системи керурюючих моментів впродовж будь-якого часу. Окрім вання кутовим станом космічного літального апатого задачею є виключення необхідності викорисрата. тання регулятора активної системи керування куСистема керування кутовим станом космічного товим станом космічного літального апарата потулітального апарата містить корпус 1 космічного жних датчиків моменту на осях підвісу зовнішніх літального апарата, з яким жорстко з'вязана орторам силових керуючих гіроскопів. гональна система координат OXYZ, по кожній осі Рішення поставленої задачі досягається тим, якої розташовані два трьохступеневих силових що в гіроскопічній системі керування кутовим стагіроскопа з колінеарними осями підвісу зовнішніх ном космічного літального апарата, яка містить по рам (на фігурі представлена одна пара гіроскопів кожній осі ортогональної системи координат, зв'япо осі ОХ). Перший і другий гіроскопи відповідно заної з корпусом, трьохступеневий силовий гіромістять ротори 2 і 3, внутрішні рами 4 і 5, зовнішні скоп змінної структури, що дозволяє трансформурами 6 і 7, аретируючі пристрої 8 і 9, датчики мовати його в двохступеневий силовий гіроскоп, менту 10 і 11 та демпфуючі пристрої 12 і 13 на аретуючий пристрій на зовнішній рамі гіроскопа, осях підвісу внутрішніх рам. На цих же осях роздатчик моменту та демпфуючий пристрій на осі ташовані датчики 14 і 15 кутів повороту вн утрішніх підвісу внутрішньої рами згідно з корисною моделрам 4 і 5 відносно зовнішніх рам 6 і 7 відповідно. лю по кожній осі ортогональної системи координат, На осях підвісу зовнішніх рам 6 і 7 розміщені двизв'язаної з корпусом, встановлено аналогічний гуни-маховики 16 і 17, статори яких жорстко з'єдтрьохступеневий силовий гіроскоп змінної структунані з осями підвісу зовнішніх рам 6 і 7 силових ри з аретуючим пристроєм на зовнішній рамі і датгіроскопів. Схема керування силовими гіроскопами чиком моменту та демпфуючим пристроєм на осі містить два ідентичних канали, кожний з яких підвісу внутрішньої рами, причому осі підвісу зовскладається з первинного перетворювача інфор 5 24489 6 мації 18, 19, підсилювальне логічного пристрою ра MXЗ збурюючого момента: 20, 21, пристрою 22, 23 керування аретиром 8, 9, пристрою 24, 25 керування двигуном-маховиком wB1 ´H1 = MXЗ (2) 16, 17. Датчик 14 кута повороту внутрішньої рами Прецесія внутрішньої рами 4 обумовлює вини4 з'єднаий з входом первинного перетворювача кнення гіроскопічного моменту МГ1 : інформації 18, датчик 15 кута поворотау внутріМГ1=Н1×wВ1×cosb 1 (3) шньої рами 5 з'єднаний з входом первинного певідносно осі підвісу зовнішньої рами 6, тобто ретворювача інформації 19. Виходи первинних відносно осі ОХ корпуса 1 космічного літального перетворювачів інформації 18 і 19 з'єднані з вхоапарата. У векторному вигляді дами підсилювально-логічних пристроїв 20 і 21 МГ1 = Н1 ´ wВ1 відповідно. Виходи підсилювально-логічного при(4) строю 20 з'єднані з входами пристроїв 22 і 23 кеСпівставляючи формули (2) і (4), можна одеррування аретирами 8 і 9 та пристроїв 24, 25 керужати рівність для моментів: вання двигунами-маховиками 16, 17: вихід 26 - з МГ1 = -МХЗ (5) входом 27 пристрою 22, вихід 28 - з входом 29 тобто сумарний момент, прикладений до корпристрою 24, вихід 30 - з входом 31 пристрою 23, пусу 1 космічного літального апарата відносно осі вихід 32 - з входом 33 пристрою 25. Виходи підсиОХ, є рівним нулю, що відповідає вимогам процесу лювально-логічного пристрою 21 з'єднані з входастабілізації космічного літального апарата в напівми пристроїв 22 і 23 керування аретирами 8 і 9 та пасивному режимі. При цьому другий силовий гіпристроїв 24 і 25 керування двигунамироскоп є цілком ізольованим від корпусу 1 космічмаховиками 16, 17: вихід 34 - з входом 35 приного літального апарата і ніяк на його стан не строю 22, вихід 36 - з входом 37 пристрою 24, вивпливає. хід 38 - з входом 39 пристрою 23, вихід 40 - з вхоСтабілізація корпусу космічного літального дом 41 пристрою 25. Вихід пристрою 22 керування апарата супроводжується прецесією рами 4 пераретиром з'єднаний з входом аретуючого пришого силового гіроскопа або безперервним збільстрою 8, вихід пристрою 23 керування аретиром шенням кута b 1: з'єднаний з входом аретируючого пристрою 9. Виt хід пристрою 24 керування двигуном-маховиком db1 з'єднаний з входом двигуна-маховика 16, вихід = wВ1 , b1 = ò wВ1(t )dt , dt пристрою 25 керування двигуном-маховиком з'єд0 (6) наний з входом двигуна-маховика 17. Датчики моде t - поточний час. менту 10 та 11 мають керуючі входи 42 та 43 відВ деякий момент часу tK кут прецесії рами 4 повідно. стане рівним визначеному максимально допустиГіроскопічна система керування кутовим стамому куту відхилення b 1max рами 4 (вектора H1 ном космічного літального апарата працює таким кінетичного моменту) від її ви хідного стану: чином . В вихідному (початковому) стані осі О1Х1 і db1 МХЗ M = , cos b1db1 = XЗ dt , О2 Х2 , O1 Y1 і O2Y2, O 1Z1 і O2Z 2 відповідно паралельdt Н1× cos b1 Н1 ні одна одній, а вектори H1 і H2 кінетичних момеb1max tK 1 нтів колінеарні та направлені протилежно один ò cos b1db1 = H ò M XЗ (t )dt , одному. Один з силових гіроскопів (наприклад, 10 0 перший) знаходиться в зааретованому стані, тобто t 1 K є двохступиневим, другий - в разаретованому стаsinb1max = MXЗ (t )dt (H1 = const) . ні, і є трьохступеневим. Завдяки аретиру 8 рама 6 H1 ò 0 (7) першого силового гіроскопа і корпус 1 космічного Відхилення рами 4 на кут b 1max означає почалітального апарата є одним цілим. Таким чином, ток режиму насичення першого силового гіроскоротор 2 і рама 4 першого силового гіроскопа і корпа, який обумовлює неможливість стабілізації коспус 1 космічного літального апарата, утворюють мічного літального апарата. трьохступеневий гіроскоп. При наявності збурююКут b 1 вимірюється за допомогою датчика кута чого моменту МXЗ відносно осі ОХ (ОХ1 ,ОХ2), при14, вихідний сигнал якого обробляється за допокладеного до корпуса 1 космічного літального апамогою первинного перетворювача інформації 18 і рата, у відповідності до закону прецесії гіроскопа подається на підсилювально-логічний пристрій 20. з'являється прецесія внутрішньої рами 4 з ротором При b 1=b 1max пристрій 20 формує ви хідні керуючі 2: сигнали. Сигнал з виходу 26 подається на вхід 27 M XЗ wB1 = пристрою 22 керування аретиром 8, який спрацьоH1 × cos b1 (1) вує і разаретує перший силовий гіроскоп, в реде wВ1 - куто ва швидкість прецесії рами 4; зультаті чого він отримує третю ступінь свободи, Н1 - величина кінетичного моменту ротора 2 стає трьохступеневим і припиняє керувати космічпершого силового гіроскопа; ним літальним апаратом відносно осі ОХ. В той же момент часу керуючий сигнал з виходу 30 підсиb 1 - кут повороту вектора H1 відносно вихіднолювально-логічного пристрою 20 подається на го його положення або кут прецесії рами 4. вхід 31 пристрою 23 керування аретиром 9, який Напрямок прецесії рами 4 визначається надо цього моменту був у стані, коли другий силовий прямком вектора H1 , кінетичного моменту і вектогіроскоп є разаретованим. Під дією керуючого сиг 7 24489 8 нала з виходу 30 пристрою 20 аретир 9 спрацьочного літального апарату за допомогою другого вує і аретує другий силовий гіроскоп, який втрачає силового гіроскопа двигун-маховик 17 буде вклюодну ступінь свободи і стає двохступеневим, зачено за допомогою керуючого сигналу з підсилювдяки чому отримує можливість стабілізувати корвально-логічного пристрою 21. пус космічного літального апарата відносно осі Процес стабілізації космічного літального апаОХ. При цьому внутрішня рама 4 першого силовората за допомогою другого силового гіроскопа в напівпасивному режимі продовжується до того го гіроскопа залишається в відхиленому на кут b 1 стані. Для повернення рами 4 в вихідний стан немоменту, коли кут b 2 відхилення внутрішньої рами обхідно до зовнішньої рами 6 прикласти момент. 5 другого силового гіроскопа досягне значення Це можливо зробити за допомогою двигунаb 2max. Після цього мають місце процеси виключенмаховика 16. Керуючий сигнал з виходу 28 приня другого силового гіроскопа і включення першого строю 20 подається на вхід 29 пристрою 24 керусилового гіроскопа, аналогічні розглянутим вище. вання двигуном-маховиком 16, який є повністю В період стабілізації космічного літального апараізольованим в кутовому русі від корпусу 1 космічта за допомогою другого силового гіроскопа, перного літального апарата. Таким чином. двигунший силовий гіроскоп є трьохступеневим, тому що маховик 16 і зовнішня рама 6 з усіма елементами він разаретований і ніяк не впливає на процес стапершого гіроскопа, які на ній розташовані, являють білізації космічного літального апарата відносно собою систему твердих тіл з взаємним кутовим осі ОХ. переміщенням. У відповідності до закону про збеТаким чином, використання по кожній осі ортореження кінетичного моменту системи взаємозв'ягональної системи координат, зв'язаної з корпусом заних твердих тіл при відсутності моменту зовнішкосмічного літального апарата, двох-першого і ніх сил: другого - аналогічних трьохступеневих силових гіроскопів змінної структури з колінеарними осями dL = 0 ; LM1 = JM × wM1 ; підвісу зовнішніх рам, на осях підвісу вн утрішніх dt рам силових гіроскопів додатково розміщених дат LЗ1 = JX1 × wЗ1 , (8) де L - кінетичний момент системи взаємозв'язаних тіл; LM1 - кінетичний момент двигунамаховика 16; LЗ1 - кінетичний момент зовнішньої рами 6 першого силового гіроскопа; JM, JX1 - моменти інерції ротора двигуна-маховика 16 та рами 6 з додатковими елементами відповідно відносно осі ОХ (ОХ1); wМ1, wЗ1 - вектори кутової швидкості ротора двигуна-маховика 16 та рами 6 відповідно відносно осі ОХ (ОХ1). Таким чином до рами 6 першого силового гіроскопа прикладений реактивний момент двигунаdwM1 , під дією якого рама 4 dt прецесує з куто вою швидкістю: J ×w wВ1 = M M1 H1 (9) в напрямку зменшення кута b 1. Процес буде завершений, коли виконується умова b 1=0, що контролюється за допомогою датчика кута 14. Напрямок прецесії рами 4 визначається параметрами системи керування двигуном-маховиком, яка містить елементи 14, 18, 24, 16 та силовий гіроскоп. В момент разаретування першого силового гіроскопа і зааретування другого силового гіроскопа з вихода 32 підсилювально-логічного пристрою 20 на вхід 33 пристрою 25 керування двигуноммаховиком подається сигнал, який обумовлює повне відключення двигуна-маховика 17, який був включений до цього моменту і за допомогою якого здійснюється приведення внутрішньої рами 5 другого силового гіроскопа в вихідний (початковий) стан. Після завершення процесу стабілізації космі маховика 16 - JM чиків кутів повороту, а на осях підвісу зовнішніх рам - двигунів-маховиків, статори яких жорстко з'єднані з осями підвісу зовнішніх рам гіроскопів, а в структурі системи - схеми керування силовими гіроскопами, яка містить датчик кута на осі підвісу внутрішньої рами кожного силового гіроскопа, первинні перетворювачі інформації, підсилювальнологічні пристрої, пристрої керування аретирами, пристрої керування двигунами-маховиками, з'єднаних певним чином один з одним і таких, що створюють єдину напівпасивну систему керування кутовим станом космічного літального апарата, дозволяє досягати слідуючий позитивний результат: 1. Забезпечення можливості керування кутовим станом космічного літального апарата тільки за допомогою інерційних органів (силових гіроскопів і двигунів-маховиків) без використання газодинамічних реактивних двигунів. 2. Виключення необхідності використання регулятора активної системи керування кутовим рухом космічного літального апарата і потужних датчиків моменту на осях підвісу зовнішніх рам силових керуючих гіроскопів. Використання системи, яка пропонується, дозволяє вирішити всі задачі керування кутовим станом космічного літального апарата при наявності збурюючих моментів тільки з використанням інерційних органів керування, які потребують для своєї роботи електроенергію, що генерується на космічному літальному апараті за допомогою сонячних батарей. Виключається необхідність витрачати рідкі компоненти палива для роботи газодинамічних реактивних двигунів, які потрібні для керування траєкторним станом космічного літального апарата. 9 Комп’ютерна в ерстка А. Крижанівський 24489 Підписне 10 Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюGyro system for control of angular state of spaceship
Автори англійськоюHordin Oleksandr Hryhorovych, Dybska Iryna Yuriivna
Назва патенту російськоюГироскопическая система управления угловым состоянием космического летательного аппарата
Автори російськоюГордин Александр Григорьевич, Дибская Ирина Юрьевна
МПК / Мітки
МПК: B64G 1/28
Мітки: система, літального, станом, космічного, керування, кутовим, апарата, гіроскопічна
Код посилання
<a href="https://ua.patents.su/5-24489-giroskopichna-sistema-keruvannya-kutovim-stanom-kosmichnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Гіроскопічна система керування кутовим станом космічного літального апарата</a>
Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 11855
Опубліковано: 16.01.2006
Автори: Бандура Іван Миколайович, Снагіцький Сергій Володимирович
МПК: B64G 1/24
Мітки: демпфірування, кутових, вісесиметричного, швидкостей, космічного, апарата, літального, система
Формула / Реферат:
Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої та другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого та другого поперечних каналів, входи яких з'єднані з виходами відповідних блоків...
Система гасіння початкових кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 12002
Опубліковано: 16.01.2006
Автори: Шапранов Ілля Володимирович, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: початкових, швидкостей, літального, апарата, вісесиметричного, система, кутових, гасіння, космічного
Формула / Реферат:
Система гасіння початкових кутових швидкостей вісесиметричного космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої і другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого і другого поперечних каналів, входи яких з'єднані з виходами відповідних блоків...
Система стабілізації безпілотного літального апарата

Номер патенту: 11981
Опубліковано: 16.01.2006
Автори: Величко Надія Вікторівна, Бандура Іван Миколайович, Симонов Володимир Федорович
МПК: B64C 13/00, G05D 1/03
Мітки: апарата, безпілотного, система, літального, стабілізації
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, датчики кута та кутової швидкості, пристрій керування, перший та другий блоки множення, порівнювач та рульовий привід, яка відрізняється тим, що до неї введена інтегруюча ланка, входом якої є вихід пристрою керування, а її вихід з'єднаний з другим входом першого блока множення та з першим входом другого блока множення.
Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 11858
Опубліковано: 16.01.2006
Автори: Войченко Оксана Олександрівна, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: спосіб, вісесиметричного, кутових, демпфірування, апарата, швидкостей, літального, космічного
Формула / Реферат:
Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата, включають керуючі реактивні двигуни, який відрізняється тим, що для демпфірування складових кутової швидкості обертання навколо трьох осей забезпечують паузу без керування, для демпфірування подовжньої кутової швидкості визначають момент початку...
Система керування двигуновою установкою літального апарата
Номер патенту: 61817
Опубліковано: 17.11.2003
Автори: Цехмейстер Олена Олексіївна, Дигало Оксана Миколаївна, Лазоркін Юрій Юрійович, Кулік Анатолій Степанович, Бандура Іван Миколайович
МПК: B64D 31/00
Мітки: система, установкою, двигуновою, керування, літального, апарата
Формула / Реферат:
Система керування двигуновою установкою літального апарата, що містить датчик частоти обертання ротора двигуна, електричний привід паливного агрегату, з'єднаний з паливним агрегатом, яка відрізняється тим, що в неї введені датчик тиску повітря за компресором, послідовно з'єднаний з блоком регулювань точності датчика тиску, датчик температури повітря за вентилятором, послідовно з'єднаний із блоком регулювань точності датчика температури, блок...
Попередній патент: Спосіб біологічного очищення стічних вод
Наступний патент: Плита теплоізоляційна
Випадковий патент: Спосіб діагностики гінекологічних захворювань у дівчат та дівчат-підлітків при вадах розвитку геніталій