Зубчаста передача

Формула / Реферат
Зубчаста передача, яка містить шестерні і колеса з розташованими на них евольвентними зубами, що знаходяться між собою в зачепленні, яка відрізняється тим, що шестірня і колесо виконані з трьох вінців з довжиною кожного з них bm = (bw - 2с)/3, віддалених один від одного двома кільцевими канавками шириною с = 5...8 мм і глибиною t = (1,2...1,4)h, причому другі і треті вінці шестірні і колеса повернуті в ободовому напрямку відносно перших вінців шестірні і колеса на кути відповідно ![]() ,
, ![]() і
і ![]() =
= ![]() ,
, ![]() =
= ![]() , крім того, твірні бокових поверхонь зубців вінців шестірні є криволінійними з радіусом кривизни
, крім того, твірні бокових поверхонь зубців вінців шестірні є криволінійними з радіусом кривизни ![]() , при цьому вирази кутів
, при цьому вирази кутів ![]() ,
, ![]() і радіусів
і радіусів ![]() ,
, ![]() ,
, ![]() , що входять в них,
, що входять в них, ![]() і робочої довжини лінії зачеплення ab знаходять по формулах:
і робочої довжини лінії зачеплення ab знаходять по формулах:
![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
; ![]() ;
;
де bw - ширина шестірні (колеса); h = 2,25 m - висота зубців; m - модуль зачеплення; ![]() - кут зачеплення; z1, z2 - число зубців шестірні і колеса; ra1 = 0,5m(z1 + 2), ra2 = 0,5m(z2 + 2) - радіуси окружностей вершин зубів шестірні і колеса;
- кут зачеплення; z1, z2 - число зубців шестірні і колеса; ra1 = 0,5m(z1 + 2), ra2 = 0,5m(z2 + 2) - радіуси окружностей вершин зубів шестірні і колеса; ![]() ,
, ![]() - радіуси основних окружностей шестірні і колеса; U = z2/z1 - передаточне відношення;
- радіуси основних окружностей шестірні і колеса; U = z2/z1 - передаточне відношення; ![]() - параметр кривизни твірних бокових поверхонь зубців шестірні в торцевих перерізах;
- параметр кривизни твірних бокових поверхонь зубців шестірні в торцевих перерізах; ![]() ,
, ![]() ,
, ![]() - радіуси кривизни бокових профілів зубців першого, другого і третього вінців шестірні в точках контакту з зубцями відповідних вінців колеса.
- радіуси кривизни бокових профілів зубців першого, другого і третього вінців шестірні в точках контакту з зубцями відповідних вінців колеса.
Текст
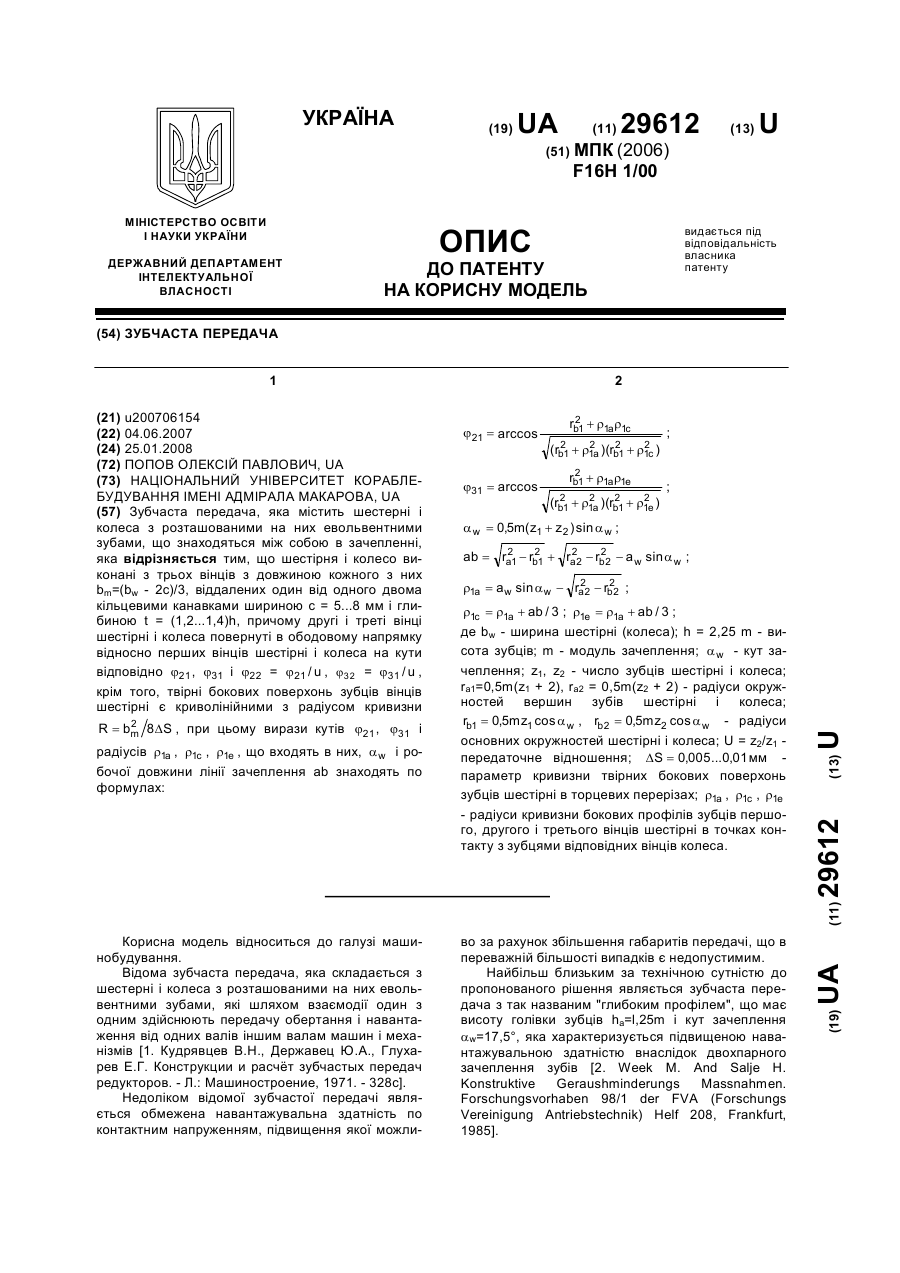
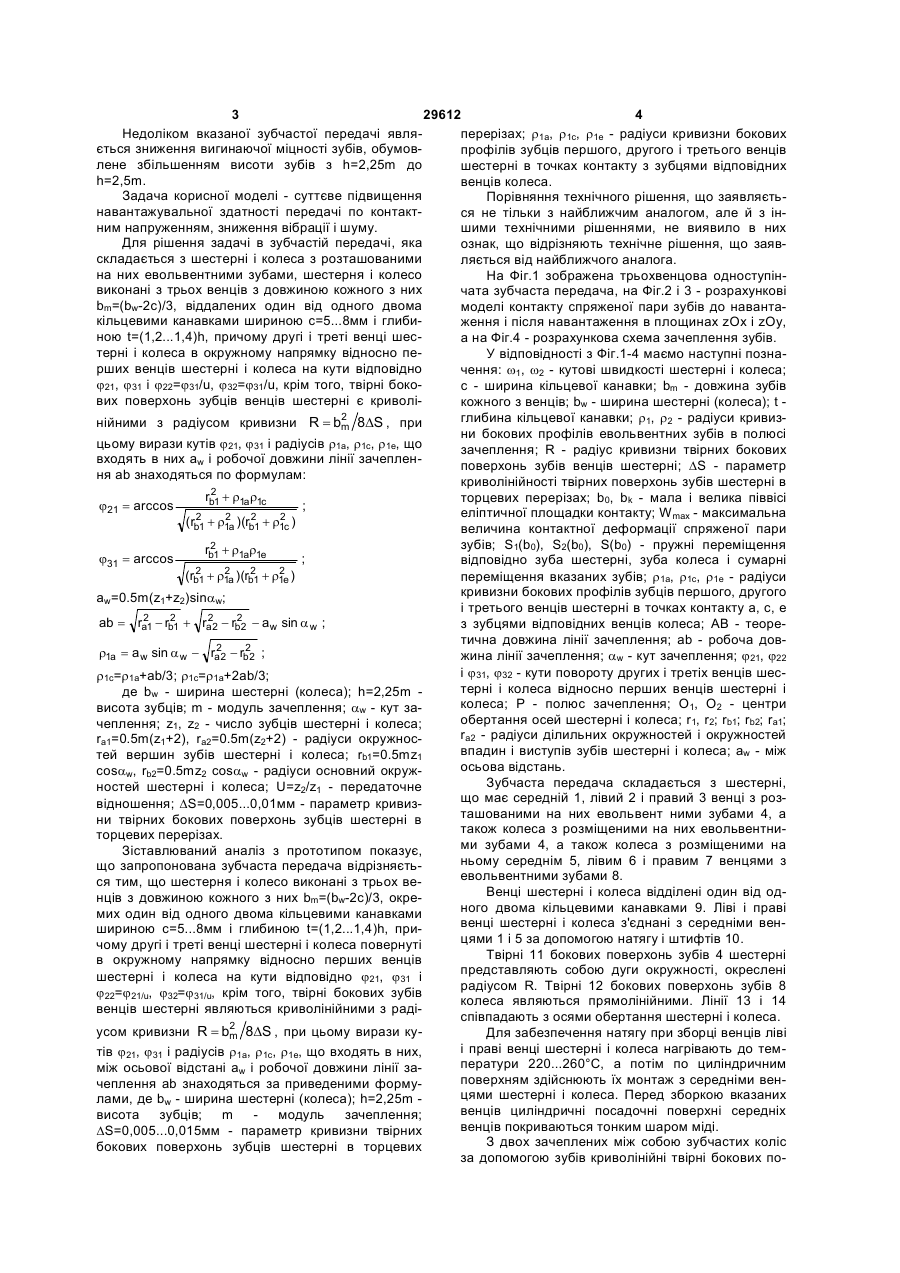
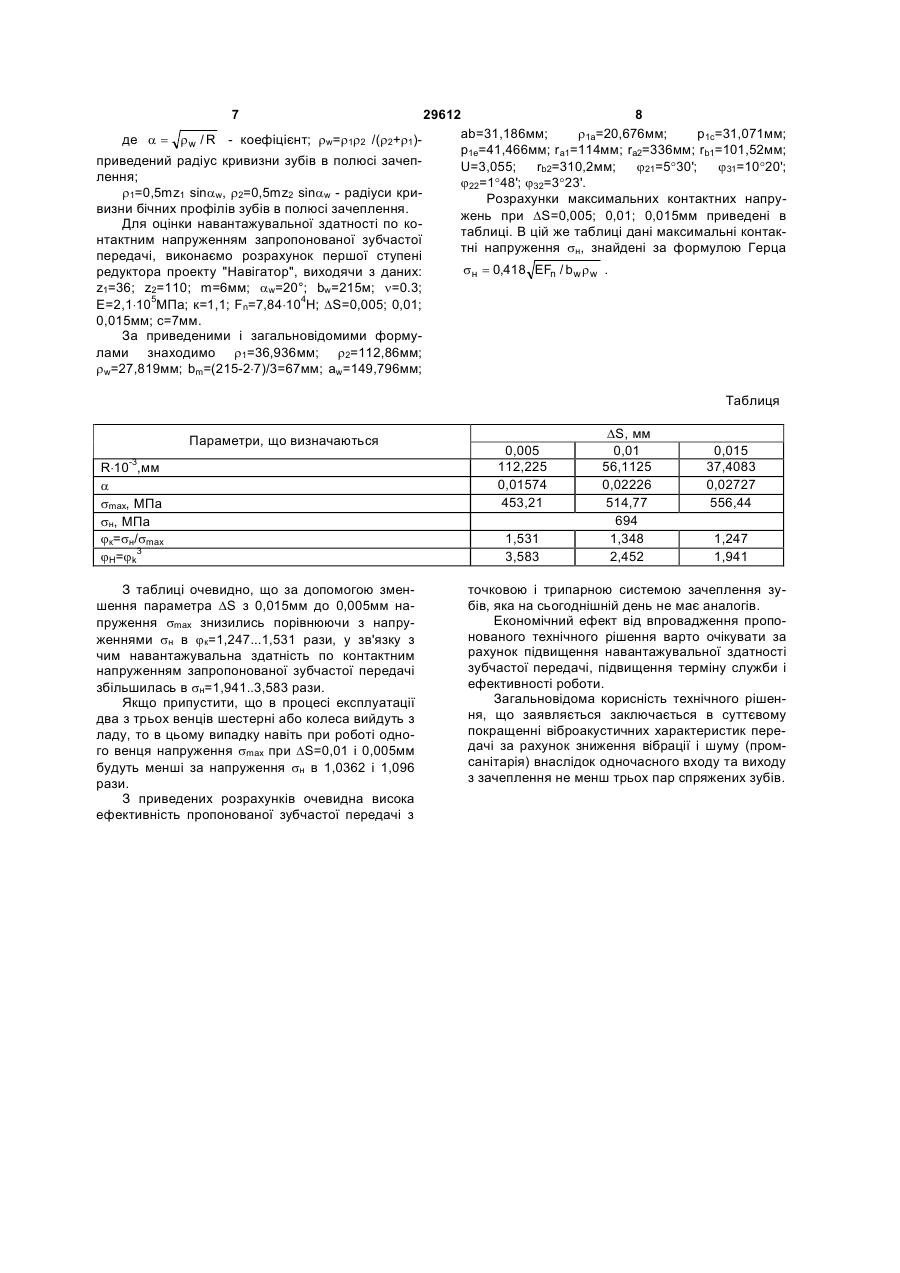
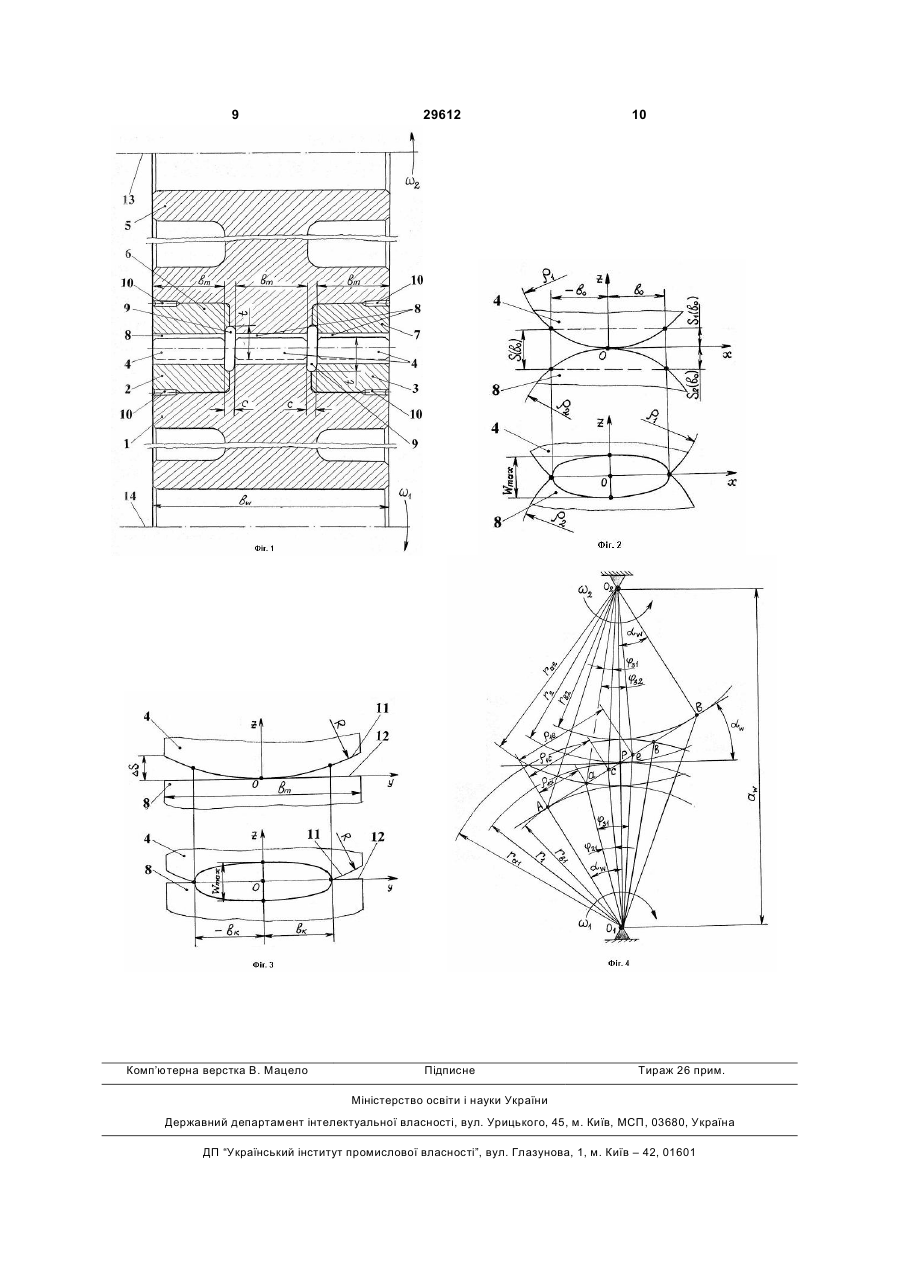
Зубчаста передача, яка містить шестерні і колеса з розташованими на них евольвентними зубами, що знаходяться між собою в зачепленні, яка відрізняється тим, що шестірня і колесо виконані з трьох вінців з довжиною кожного з них bm =(bw - 2с)/3, віддалених один від одного двома кільцевими канавками шириною с = 5...8 мм і глибиною t = (1,2...1,4)h, причому другі і треті вінці шестірні і колеса повернуті в ободовому напрямку відносно перших вінців шестірні і колеса на кути відповідно j21 , j31 і j22 = j21 / u , j32 = j31 / u , крім того, твірні бокових поверхонь зубців вінців шестірні є криволінійними з радіусом кривизни 2 3 29612 4 Недоліком вказаної зубчастої передачі являперерізах; r1а, r1с, r1e - радіуси кривизни бокових ється зниження вигинаючої міцності зубів, обумовпрофілів зубців першого, другого і третього венців лене збільшенням висоти зубів з h=2,25m до шестерні в точках контакту з зубцями відповідних h=2,5m. венців колеса. Задача корисної моделі - суттєве підвищення Порівняння технічного рішення, що заявляєтьнавантажувальної здатності передачі по контактся не тільки з найближчим аналогом, але й з інним напруженням, зниження вібрації і шуму. шими технічними рішеннями, не виявило в них Для рішення задачі в зубчастій передачі, яка ознак, що відрізняють технічне рішення, що заявскладається з шестерні і колеса з розташованими ляється від найближчого аналога. на них евольвентними зубами, шестерня і колесо На Фіг.1 зображена трьохвенцова одноступінвиконані з трьох венців з довжиною кожного з них чата зубчаста передача, на Фіг.2 і 3 - розрахункові bm =(bw-2с)/3, віддалених один від одного двома моделі контакту спряженої пари зубів до навантакільцевими канавками шириною с=5...8мм і глибиження і після навантаження в площинах zOx і zOy, ною t=(1,2...1,4)h, причому другі і треті венці шеса на Фіг.4 - розрахункова схема зачеплення зубів. терні і колеса в окружному напрямку відносно пеУ відповідності з Фіг.1-4 маємо наступні познарших венців шестерні і колеса на кути відповідно чення: w1, w2 - кутові швидкості шестерні і колеса; j21, j31 і j22=j31/u, j32=j31/u, крім того, твірні бокос - ширина кільцевої канавки; bm - довжина зубів вих поверхонь зубців венців шестерні є криволікожного з венців; bw - ширина шестерні (колеса); t 2 глибина кільцевої канавки; r1, r2 - радіуси кривизнійними з радіусом кривизни R = bm 8DS , при ни бокових профілів евольвентних зубів в полюсі цьому вирази кутів j21, j31 і радіусів r1а, r1с, r1e, що зачеплення; R - радіус кривизни твірних бокових входять в них aw і робочої довжини лінії зачепленповерхонь зубів венців шестерні; DS - параметр ня аb знаходяться по формулам: криволінійності твірних поверхонь зубів шестерні в 2 rb1 + r1ar1c торцевих перерізах; b0, bk - мала і велика піввісі j21 = arccos ; еліптичної площадки контакту; W max - максимальна 2 2 2 2 (rb1 + r1a )(rb1 + r1c ) величина контактної деформації спряженої пари 2 зубів; S1(b0), S2(b0), S(b0) - пружні переміщення rb1 + r1ar1e j31 = arccos ; відповідно зуба шестерні, зуба колеса і сумарні 2 2 2 2 (rb1 + r1a )(rb1 + r1e ) переміщення вказаних зубів; r1а, r1с, r1e - радіуси кривизни бокових профілів зубців першого, другого aw=0.5m(z1+z2)sinaw; і третього венців шестерні в точках контакту а, с, e 2 2 2 2 ab = ra1 - rb1 + ra2 - rb2 - a w sin a w ; з зубцями відповідних венців колеса; АВ - теоретична довжина лінії зачеплення; ab - робоча дов2 2 r1a = a w sin a w - ra2 - rb2 ; жина лінії зачеплення; aw - кут зачеплення; j21, j22 і j31, j32 - кути повороту других і третіх венців шесr1c=r1a+ab/3; r1c=r1a+2ab/3; терні і колеса відносно перших венців шестерні і де bw - ширина шестерні (колеса); h=2,25m колеса; Р - полюс зачеплення; О1, O2 - центри висота зубців; m - модуль зачеплення; aw - кут заобертання осей шестерні і колеса; r1, r2; rb1; rb2; ra1; чеплення; z1, z2 - число зубців шестерні і колеса; ra2 - радіуси ділильних окружностей і окружностей ra1=0.5m(z1+2), ra2=0.5m(z2+2) - радіуси окружносвпадин і виступів зубів шестерні і колеса; aw - між тей вершин зубів шестерні і колеса; rb1=0.5mz1 осьова відстань. cosaw, rb2=0.5mz2 cosaw - радіуси основний окружЗубчаста передача складається з шестерні, ностей шестерні і колеса; U=z2/z1 - передаточне що має середній 1, лівий 2 і правий 3 венці з розвідношення; DS=0,005...0,01мм - параметр кривизташованими на них евольвент ними зубами 4, а ни твірних бокових поверхонь зубців шестерні в також колеса з розміщеними на них евольвентниторцевих перерізах. ми зубами 4, а також колеса з розміщеними на Зіставлюваний аналіз з прототипом показує, ньому середнім 5, лівим 6 і правим 7 венцями з що запропонована зубчаста передача відрізняєтьевольвентними зубами 8. ся тим, що шестерня і колесо виконані з трьох веВенці шестерні і колеса відділені один від однців з довжиною кожного з них bm =(bw-2с)/3, окреного двома кільцевими канавками 9. Ліві і праві мих один від одного двома кільцевими канавками венці шестерні і колеса з'єднані з середніми веншириною с=5...8мм і глибиною t=(1,2...1,4)h, прицями 1 і 5 за допомогою натягу і штифтів 10. чому другі і треті венці шестерні і колеса повернуті Твірні 11 бокових поверхонь зубів 4 шестерні в окружному напрямку відносно перших венців представляють собою дуги окружності, окреслені шестерні і колеса на кути відповідно j21, j31 і радіусом R. Твірні 12 бокових поверхонь зубів 8 j22=j21/u, j32=j31/u, крім того, твірні бокових зубів колеса являються прямолінійними. Лінії 13 і 14 венців шестерні являються криволінійними з радіспівпадають з осями обертання шестерні і колеса. 2 усом кривизни R = bm 8DS , при цьому вирази куДля забезпечення натягу при зборці венців ліві і праві венці шестерні і колеса нагрівають до темтів j21, j31 і радіусів r1а, r1с, r1e, що входять в них, ператури 220...260°С, а потім по циліндричним між осьової відстані аw і робочої довжини лінії заповерхням здійснюють їх монтаж з середніми венчеплення ab знаходяться за приведеними формуцями шестерні і колеса. Перед зборкою вказаних лами, де bw - ширина шестерні (колеса); h=2,25m венців циліндричні посадочні поверхні середніх висота зубців; m - модуль зачеплення; венців покриваються тонким шаром міді. DS=0,005...0,015мм - параметр кривизни твірних З двох зачеплених між собою зубчастих коліс бокових поверхонь зубців шестерні в торцевих за допомогою зубів криволінійні твірні бокових по 5 29612 6 верхонь зубів доцільно виконувати на колесі з Варто також відмітити, що наявність кільцевих меншим числом зубів, тобто на шестерні, що зниканавок в зубчастих колесах призводить до більш жує затрати на виготовлення і зменшує час на теінтенсивного охолодження зубів і ефективному хнологічний процес. відводу тепла з зони їх контакту. Зубчаста передача працює наступним чином. Розглянемо вивід залежностей кутів j21, j31. З При роботі двигуна, приєднаного через вал до цією метою, виходячи з теореми косинусів на шестерні, яка складається з трьох венців, віддалеФіг.4, запишемо: них один від одного двома кільцевими канавками, (O a)2 + (O1c )2 - (ac )2 j21 = arccos 1 ; (1) вказана шестерня характеризується кутовою шви2(O1a )(O1c ) дкістю w1. Евольвентні зубці, розташовані на венцях шестерні діють на аналогічні зубці венців зуб(O a )2 + (O1e )2 - (ae )2 j31 = arccos 1 ; (2) частого колеса, у зв'язку з чим воно приймає 2(O1a )(O1c ) кутову швидкість w2. де Внаслідок повороту другого і третього венців шестерні відносно першого венця шестерні, а таO1a = (O1A )2 + ( Aa)2 ; кож другого і третього венців колеса відносно першого венця колеса на кути відповідно j21, j31 і O1c = (O1A )2 + ( Ac )2 ; j31, j32 в зачепленні при роботі передачі приймають участь одночасно три спряженні пари зубців. O1e = (O1A )2 + ( Ae)2 ; При цьому зубці перших венців шестерні і колеса Ac=Aa+ab/3; будуть контактувати в точці а, зубці других венців Ae=Aa+2ab/3: Aa=AB-Ba; шестерні і колеса - в точці с, а зубці третіх венців AB=awsinaw; шестерні і колеса - в точці е. 2 2 Кути повороту j21, j31 другого і третього венців Ba = ra2 - rb2 ; шестерні відносно першого венця шестерні визна2 2 Aa = a w sin a w - ra2 - rb2 ; чені з урахуванням того, що ас=се=ер=ab/3. Сказане в рівній степені відноситься і до кутів aw = 0.5m( z1 + z2 ) sin a w j22=j21/u, j32=j31/u, які характеризують поворот В результаті підстановки приведених співвіддругого і третього венців колеса в окружному наношень у вирази (1), (2) і відповідних перетворень прямку відносно першого венця колеса. знайдемо залежності вказаних кутів в кінцевому Вказане розташування венців шестерні і колевигляді: са приводить до того, що в зачепленні приймають 2 участь, як уже зазначалось, три спряженні пари rb1 + r1ar1c j21 = arccos (3) зубів, у зв'язку з чим розглядувана зубчаста пере2 2 2 2 (rb1 + r1a )(rb1 + r1c ) дача являється передачею з трипарним зачепленням зубів. При цьому на спряженні пари зубів кож2 rb1 + r1ar1e ного з венців діє лиш третя, частина нормальної j31 = arccos (4) 2 2 2 2 сили, що передається Fn, тобто Fn/3, при умові (rb1 + r1a )(rb1 + r1e ) абсолютно точного виготовлення зубчастих коліс. 2 2 В дійсності, враховуючи похибку кутів повороде r1a = a w sin a w - rb1 - rb2 ; r1c = r1a + ab / 3 ; ту венців відносно один одного в окружному наr1e = r1a + 2ab / 3 - радіуси кривизни бічних профіпрямку і неоднакову жорсткість зачеплення, варто лів зубів венців шестерні в точках а, с, e; виходити не з Fn/3, а з кFn/3, де к=1,04...1,1 - коефіцієнт нерівномірності розподілу навантаження 2 2 2 2 ab = ra1 - rb1 + ra2 - rb2 - a w sin a w - робоча між вказаними спряженими парами зубів. довжина лінії зачеплення. Таким чином, в зубчастій передачі, що розгляЗ урахуванням залежностей (3) і (4) знайдені дається при одночасному положенні в зачепленні вирази кутів трьох спряжених пар зубів при визначенніконтактj22=j21/u, j32=j31/u, причому при U=1 маємо них напружень і напружень вигину варто виходити j22=j21 і j32=j31. з величини сили кFn/3. При відсутності навантаження початковий конДля визначення максимальних контактних натакт зубів в точках а, с, е являється точковим внапружень smax в полюсі зачеплення (в точці р) при слідок наявності криволінійних твірних бічних покоефіцієнтах Пуассона n1=n2-n=0,3, модулях пружверхонь зубів шестерні, у зв'язку з чим передача, ності матеріалів Е1= Е2 =Е і нормальної сили кFn/3 що розглядається являється просторовою. При в запропонованій зубчастій передачі з точковою і навантаженні зубів вказані точки контакту переттрипарною системою зачеплення зубів можна сковорюються в три площадки контакту еліптичної ристатись залежністю [3. Д. п. №11441 на корисну форми з розміром кожної з них Пbobk. модель. Україна. Зубчаста передача Попова О.П. Знаходження в зачепленні одночасно трьох з точковою системою зачеплення евольвентних спряжених пар зубів в процесі роботи передачі зубів / Попов О.П. - U200506846; Заявл.11.07.05; супроводжується більш плавним і менш ударним Опубл.15.12.05. Бюл.№12]: входом і виходом зубів із зачеплення, що призво0.229 3 k( a + n )2 E2Fn дить до значного зниження ударних навантажень (5) smax = на зубці. При цьому внаслідок зниження вібрації і a R2 шуму покращуються віброакустичні характеристики зубчастої передачі. 7 29612 8 ab=31,186мм; r1a=20,676мм; p1c=31,071мм; де a = r w / R - коефіцієнт; rw=r1r2 /(r2+r1)p1e=41,466мм; ra1=114мм; ra2=336мм; rb1=101,52мм; приведений радіус кривизни зубів в полюсі зачепU=3,055; rb2=310,2мм; j21=5°30'; j31=10°20'; лення; j22=1°48'; j32=3°23'. r1=0,5mz1 sinaw, r2=0,5mz2 sinaw - радіуси криРозрахунки максимальних контактних напрувизни бічних профілів зубів в полюсі зачеплення. жень при DS=0,005; 0,01; 0,015мм приведені в Для оцінки навантажувальної здатності по котаблиці. В цій же таблиці дані максимальні контакнтактним напруженням запропонованої зубчастої тні напруження sн, знайдені за формулою Герца передачі, виконаємо розрахунок першої ступені sн = 0,418 EFn / b w r w . редуктора проекту "Навігатор", виходячи з даних: z1=36; z2=110; m=6мм; aw=20°; bw=215м; n=0.3; E=2,1×105МПа; к=1,1; Fn=7,84×104H; DS=0,005; 0,01; 0,015мм; с=7мм. За приведеними і загальновідомими формулами знаходимо r1=36,936мм; r2=112,86мм; rw=27,819мм; bm =(215-2×7)/3=67мм; aw=149,796мм; Таблиця Параметри, що визначаються R×10-3,мм a smax, МПа sн, МПа jк=sн/smах jН=jk3 З таблиці очевидно, що за допомогою зменшення параметра DS з 0,015мм до 0,005мм напруження smах знизились порівнюючи з напруженнями sн в jк=1,247...1,531 рази, у зв'язку з чим навантажувальна здатність по контактним напруженням запропонованої зубчастої передачі збільшилась в sн=1,941..3,583 рази. Якщо припустити, що в процесі експлуатації два з трьох венців шестерні або колеса вийдуть з ладу, то в цьому випадку навіть при роботі одного венця напруження smах при DS=0,01 і 0,005мм будуть менші за напруження sн в 1,0362 і 1,096 рази. З приведених розрахунків очевидна висока ефективність пропонованої зубчастої передачі з 0,005 112,225 0,01574 453,21 1,531 3,583 DS, мм 0,01 56,1125 0,02226 514,77 694 1,348 2,452 0,015 37,4083 0,02727 556,44 1,247 1,941 точковою і трипарною системою зачеплення зубів, яка на сьогоднішній день не має аналогів. Економічний ефект від впровадження пропонованого технічного рішення варто очікувати за рахунок підвищення навантажувальної здатності зубчастої передачі, підвищення терміну служби і ефективності роботи. Загальновідома корисність технічного рішення, що заявляється заключається в суттєвому покращенні віброакустичних характеристик передачі за рахунок зниження вібрації і шуму (промсанітарія) внаслідок одночасного входу та виходу з зачеплення не менш трьох пар спряжених зубів. 9 Комп’ютерна верстка В. Мацело 29612 Підписне 10 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюTooth gear
Автори англійськоюPopov Oleksii Pavlovych
Назва патенту російськоюЗубчатая передача
Автори російськоюПопов Алексей Павлович
МПК / Мітки
МПК: F16H 1/00
Код посилання
<a href="https://ua.patents.su/5-29612-zubchasta-peredacha.html" target="_blank" rel="follow" title="База патентів України">Зубчаста передача</a>
Зубчаста передача
Номер патенту: 25098
Опубліковано: 25.07.2007
Автор: Попов Олексій Павлович
МПК: F16H 1/00
Формула / Реферат:
Зубчаста передача, яка складається з тривінцевих шестірні і колеса з розташованими на них евольвентними зубами, які взаємодіють по лінії один з одним, яка відрізняється тим, що зубчасте колесо виконано одновінцевим, а твірні бічних поверхонь евольвентних зубів тривінцевої шестірні виконані криволінійними з радіусом кривизни R, у зв'язку з чим має місце точкова взаємодія зубів шестірні і колеса, при цьому радіус R знаходиться за...
Зубчаста передача попова о.п.
Номер патенту: 59839
Опубліковано: 15.09.2003
Автор: Попов Олексій Павлович
МПК: F16H 1/00
Мітки: передача, попова, о.п, зубчаста
Формула / Реферат:
Зубчаста передача, що містить ведуче та ведене зубчасті колеса з розташованими на них зубами, які знаходяться між собою в зачепленні, яка відрізняється тим, що будь-які точки бокових профілів зубів характеризуються сталими і рівними радіусами кривизни, що перевищують за значенням змінні радіуси кривизни бокових профілів евольвентних зубів, до того ж центри кривизни радіусів не збігаються один з одним і розташовані поза лінією зачеплення, за...
Зубчаста передача
Номер патенту: 7387
Опубліковано: 15.06.2005
Автори: Медведовський Олександр Михайлович, Попов Олексій Павлович
МПК: F16H 1/00
Формула / Реферат:
Зубчаста передача, що містить ведуче і ведене зубчасті колеса з розташованими на них евольвентними зубами, зрізаними під кутом по висоті на торцевих ділянках, що знаходяться між собою в зачепленні, яка відрізняється тим, що зуби коліс по довжині розділені на три частини кільцевими канавками, що розташовані симетрично відносно одна одної, причому ширина α=3 мм кільцевих канавок зубів ведучого колеса на 2...3 мм менша від ширини...
Зубчаста передача
Номер патенту: 22384
Опубліковано: 25.04.2007
Автори: Марченко Анатолій Іванович, Піпа Борис Федорович, Хомяк Олег Миколайович
МПК: F16H 1/24
Формула / Реферат:
Зубчаста передача, що містить шестірню та зубчасте колесо, яка відрізняється тим, що додатково обладнана циліндричними роликами, вільно встановленими між зубами шестірні та виступними над їх головками, причому циліндричні ролики з'єднують шестірню та зубчасте колесо між собою.
Зубчаста передача з еволютним одностороннім зачепленням
Номер патенту: 68700
Опубліковано: 16.08.2004
Автор: Павлов Анатолій Івановіч
МПК: F16H 1/06
Мітки: еволютним, зубчаста, одностороннім, зачепленням, передача
Формула / Реферат:
Зубчаста передача з еволютним одностороннім зачепленням, що складається з шестірні та колеса, у яких зубці опуклі або угнуті, яка відрізняється тим, що бокові поверхні зубців описані рівняннями:,,де ,
Попередній патент: Спосіб біологічної переробки відходів, що містять жир, в біологічний компост
Наступний патент: Спосіб диференційної діагностики новоутворень щитовидної залози
Випадковий патент: Флотатор