Спосіб визначення дальності об’єктів

Формула / Реферат
Спосіб визначення дальності об’єктів, який полягає в тому, що отримують два зображення об'єкту вдовж різних ліній візування оптико-електронних засобів, далі кожний елемент двох зображень перетворюють у відповідний електричний аналоговий сигнал, що далі перетворюють в дискретну форму і шляхом порівняння дискретної інформації про N послідовних елементів другого зображення з дискретною інформацією про N послідовних елементів першого зображення виділяють набір з N послідовних елементів другого зображення, ідентичних N послідовним елементам першого зображення, і визначають відносну відстань між зображеннями об'єкту шляхом виділення у другому зображені набору з N послідовних елементів між ними, що відрізняється тим що в кожному з засобів запам'ятовують перетворені в дискретну форму зображення, отримані при положенні ліній візування оптико-електронних засобів, таких, що забезпечують спостереження одного і того ж сюжету в кожному з засобів, здійснюють синхронне перекидання візирних осей в суміжну область простору, запам'ятовують дискретну інформацію про зображення сюжетів, що спостерігаються, послідовно суміщають суміжні по простору сюжети, що спостерігаються, шляхом порівняння дискретної інформації про N відповідних елементів попереднього і наступного зображень по спільній частині сюжетів, що потрапила у зону їхнього перекриття, запам'ятовують інтегровані кадри, що сформувалися, в запам'ятовувальному приладі, а також здійснюють подальше перекидання візирних осей і формування інтегрованих кадрів, доки зображення об'єкту не проявиться в обох з них, та виконують селекцію зображень об'єкту на фоні загального сюжету, шляхом порівняння сформованих інтегрованих кадрів.
Текст
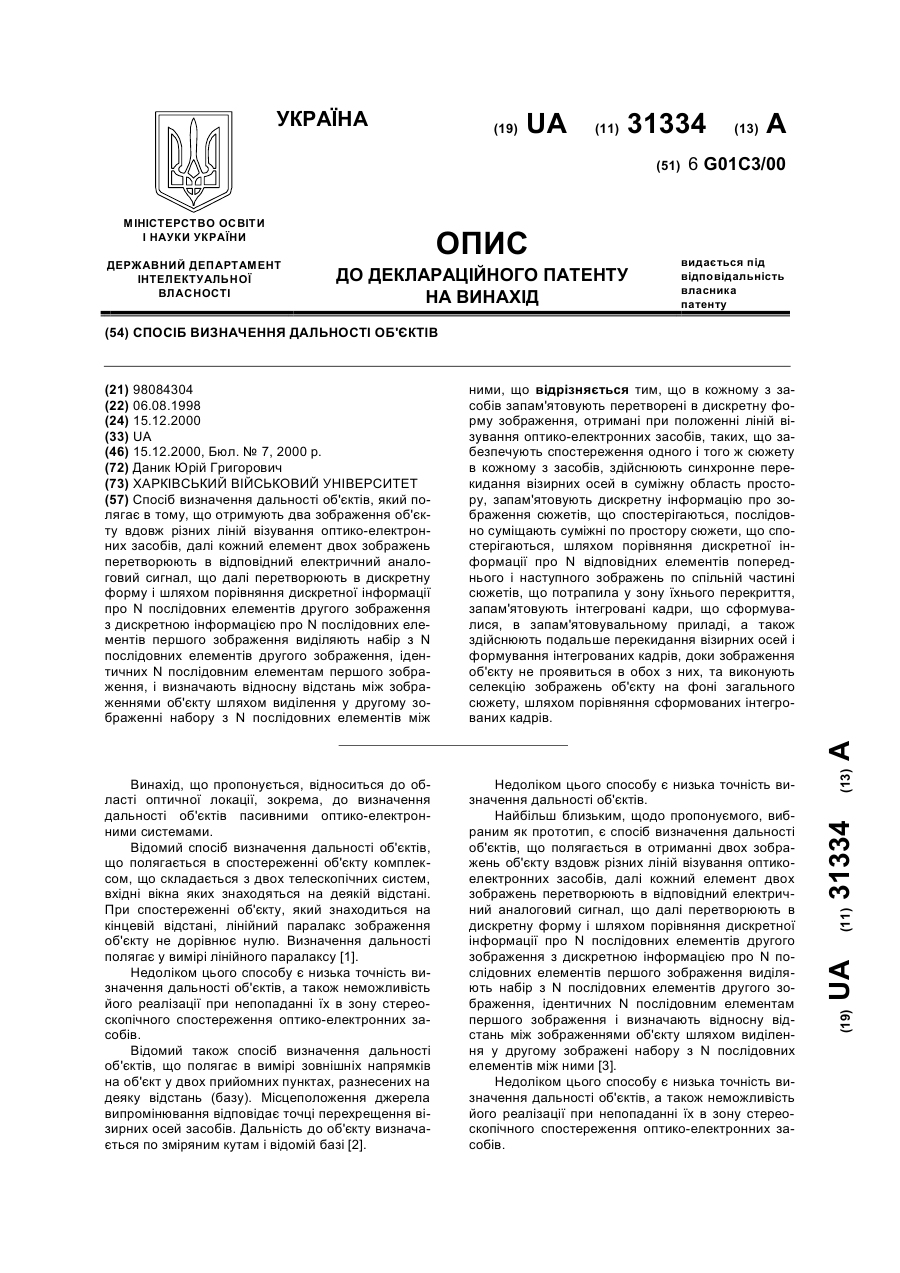
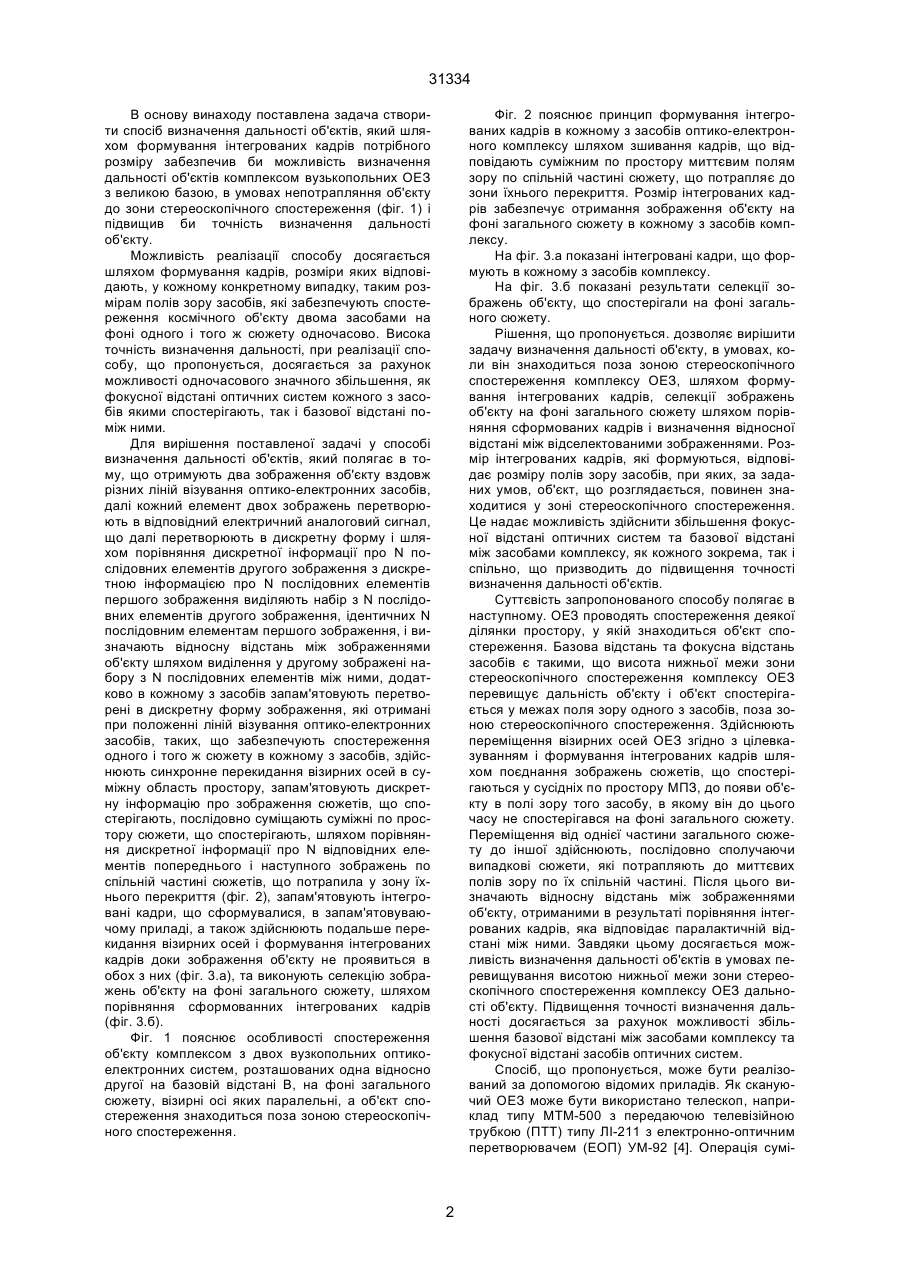
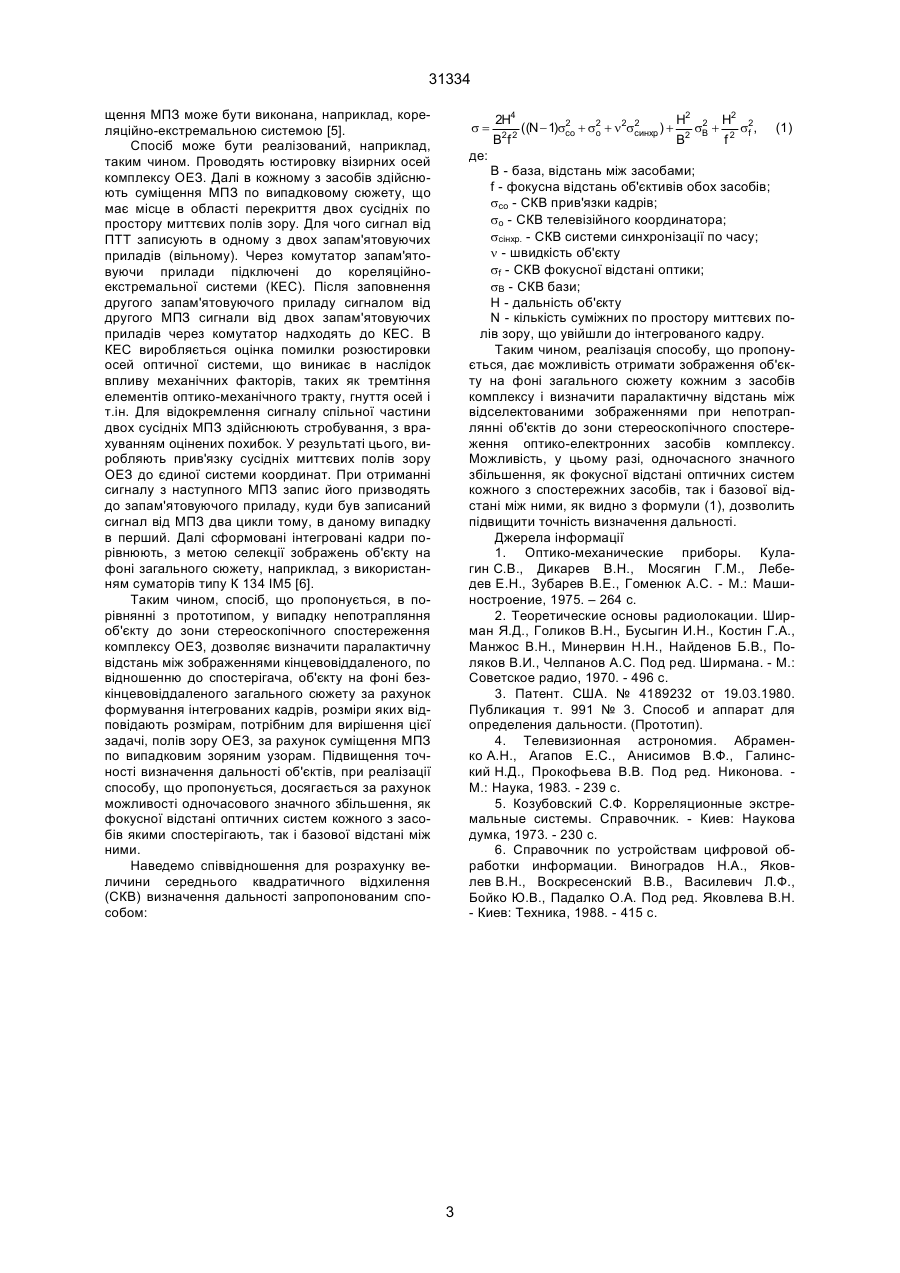
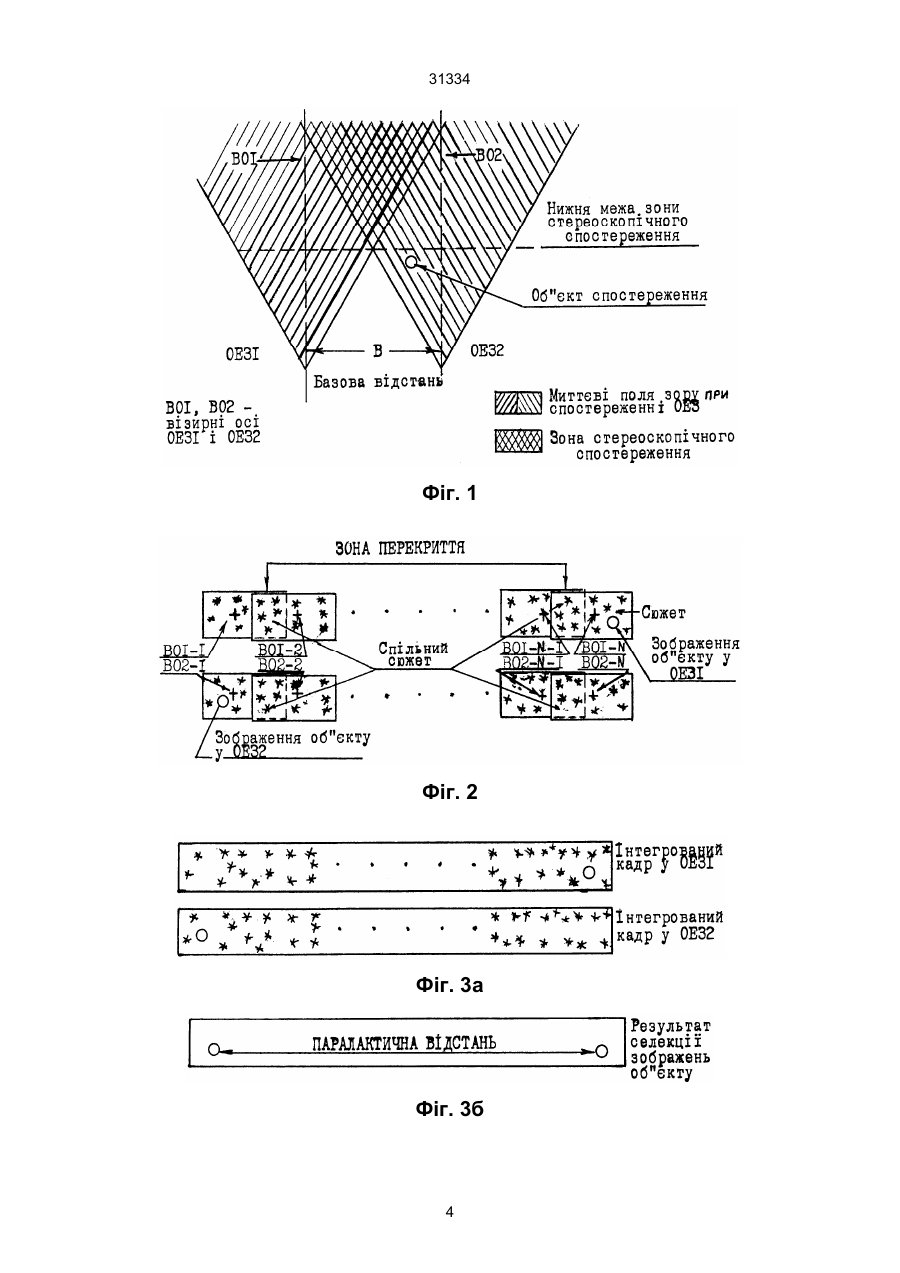
Спосіб визначення дальності об'єктів, який полягає в тому, що отримують два зображення об'єкту вдовж різних ліній візування оптико-електронних засобів, далі кожний елемент двох зображень перетворюють в відповідний електричний аналоговий сигнал, що далі перетворюють в дискретну форму і шляхом порівняння дискретної інформації про N послідовних елементів другого зображення з дискретною інформацією про N послідовних елементів першого зображення виділяють набір з N послідовних елементів другого зображення, ідентичних N послідовним елементам першого зображення, і визначають відносну відстань між зображеннями об'єкту шляхом виділення у другому зображенні набору з N послідовних елементів між 31334 В основу винаходу поставлена задача створити спосіб визначення дальності об'єктів, який шляхом формування інтегрованих кадрів потрібного розміру забезпечив би можливість визначення дальності об'єктів комплексом вузькопольних ОЕЗ з великою базою, в умовах непотрапляння об'єкту до зони стереоскопічного спостереження (фіг. 1) і підвищив би точність визначення дальності об'єкту. Можливість реалізації способу досягається шляхом формування кадрів, розміри яких відповідають, у кожному конкретному випадку, таким розмірам полів зору засобів, які забезпечують спостереження космічного об'єкту двома засобами на фоні одного і того ж сюжету одночасово. Висока точність визначення дальності, при реалізації способу, що пропонується, досягається за рахунок можливості одночасового значного збільшення, як фокусної відстані оптичних систем кожного з засобів якими спостерігають, так і базової відстані поміж ними. Для вирішення поставленої задачі у способі визначення дальності об'єктів, який полягає в тому, що отримують два зображення об'єкту вздовж різних ліній візування оптико-електронних засобів, далі кожний елемент двох зображень перетворюють в відповідний електричний аналоговий сигнал, що далі перетворюють в дискретну форму і шляхом порівняння дискретної інформації про N послідовних елементів другого зображення з дискретною інформацією про N послідовних елементів першого зображення виділяють набір з N послідовних елементів другого зображення, ідентичних N послідовним елементам першого зображення, і визначають відносну відстань між зображеннями об'єкту шляхом виділення у другому зображені набору з N послідовних елементів між ними, додатково в кожному з засобів запам'ятовують перетворені в дискретну форму зображення, які отримані при положенні ліній візування оптико-електронних засобів, таких, що забезпечують спостереження одного і того ж сюжету в кожному з засобів, здійснюють синхронне перекидання візирних осей в суміжну область простору, запам'ятовують дискретну інформацію про зображення сюжетів, що спостерігають, послідовно суміщають суміжні по простору сюжети, що спостерігають, шляхом порівняння дискретної інформації про N відповідних елементів попереднього і наступного зображень по спільній частині сюжетів, що потрапила у зону їхнього перекриття (фіг. 2), запам'ятовують інтегровані кадри, що сформувалися, в запам'ятовуваючому приладі, а також здійснюють подальше перекидання візирних осей і формування інтегрованих кадрів доки зображення об'єкту не проявиться в обох з них (фіг. 3.а), та виконують селекцію зображень об'єкту на фоні загального сюжету, шляхом порівняння сформованних інтегрованих кадрів (фіг. 3.б). Фіг. 1 пояснює особливості спостереження об'єкту комплексом з двох вузкопольних оптикоелектронних систем, розташованих одна відносно другої на базовій відстані В, на фоні загального сюжету, візирні осі яких паралельні, а об'єкт спостереження знаходиться поза зоною стереоскопічного спостереження. Фіг. 2 пояснює принцип формування інтегрованих кадрів в кожному з засобів оптико-електронного комплексу шляхом зшивання кадрів, що відповідають суміжним по простору миттєвим полям зору по спільній частині сюжету, що потрапляє до зони їхнього перекриття. Розмір інтегрованих кадрів забезпечує отримання зображення об'єкту на фоні загального сюжету в кожному з засобів комплексу. На фіг. 3.а показані інтегровані кадри, що формують в кожному з засобів комплексу. На фіг. 3.б показані результати селекції зображень об'єкту, що спостерігали на фоні загального сюжету. Рішення, що пропонується. дозволяє вирішити задачу визначення дальності об'єкту, в умовах, коли він знаходиться поза зоною стереоскопічного спостереження комплексу ОЕЗ, шляхом формування інтегрованих кадрів, селекції зображень об'єкту на фоні загального сюжету шляхом порівняння сформованих кадрів і визначення відносної відстані між відселектованими зображеннями. Розмір інтегрованих кадрів, які формуються, відповідає розміру полів зору засобів, при яких, за заданих умов, об'єкт, що розглядається, повинен знаходитися у зоні стереоскопічного спостереження. Це надає можливість здійснити збільшення фокусної відстані оптичних систем та базової відстані між засобами комплексу, як кожного зокрема, так і спільно, що призводить до підвищення точності визначення дальності об'єктів. Суттєвість запропонованого способу полягає в наступному. ОЕЗ проводять спостереження деякої ділянки простору, у якій знаходиться об'єкт спостереження. Базова відстань та фокусна відстань засобів є такими, що висота нижньої межи зони стереоскопічного спостереження комплексу ОЕЗ перевищує дальність об'єкту і об'єкт спостерігається у межах поля зору одного з засобів, поза зоною стереоскопічного спостереження. Здійснюють переміщення візирних осей ОЕЗ згідно з цілевказуванням і формування інтегрованих кадрів шляхом поєднання зображень сюжетів, що спостерігаються у сусідніх по простору МПЗ, до появи об'єкту в полі зору того засобу, в якому він до цього часу не спостерігався на фоні загального сюжету. Переміщення від однієї частини загального сюжету до іншої здійснюють, послідовно сполучаючи випадкові сюжети, які потрапляють до миттєвих полів зору по їх спільній частині. Після цього визначають відносну відстань між зображеннями об'єкту, отриманими в результаті порівняння інтегрованих кадрів, яка відповідає паралактичній відстані між ними. Завдяки цьому досягається можливість визначення дальності об'єктів в умовах перевищування висотою нижньої межи зони стереоскопічного спостереження комплексу ОЕЗ дальності об'єкту. Підвищення точності визначення дальності досягається за рахунок можливості збільшення базової відстані між засобами комплексу та фокусної відстані засобів оптичних систем. Спосіб, що пропонується, може бути реалізований за допомогою відомих приладів. Як скануючий ОЕЗ може бути використано телескоп, наприклад типу МТМ-500 з передаючою телевізійною трубкою (ПТТ) типу ЛІ-211 з електронно-оптичним перетворювачем (ЕОП) УМ-92 [4]. Операція сумі 2 31334 щення МПЗ може бути виконана, наприклад, кореляційно-екстремальною системою [5]. Спосіб може бути реалізований, наприклад, таким чином. Проводять юстировку візирних осей комплексу ОЕЗ. Далі в кожному з засобів здійснюють суміщення МПЗ по випадковому сюжету, що має місце в області перекриття двох сусідніх по простору миттєвих полів зору. Для чого сигнал від ПТТ записують в одному з двох запам'ятовуючих приладів (вільному). Через комутатор запам'ятовуючи прилади підключені до кореляційноекстремальної системи (КЕС). Після заповнення другого запам'ятовуючого приладу сигналом від другого МПЗ сигнали від двох запам'ятовуючих приладів через комутатор надходять до КЕС. В КЕС виробляється оцінка помилки розюстировки осей оптичної системи, що виникає в наслідок впливу механічних факторів, таких як тремтіння елементів оптико-механічного тракту, гнуття осей і т.ін. Для відокремлення сигналу спільної частини двох сусідніх МПЗ здійснюють стробування, з врахуванням оцінених похибок. У результаті цього, виробляють прив'язку сусідніх миттєвих полів зору ОЕЗ до єдиної системи координат. При отриманні сигналу з наступного МПЗ запис його призводять до запам'ятовуючого приладу, куди був записаний сигнал від МПЗ два цикли тому, в даному випадку в перший. Далі сформовані інтегровані кадри порівнюють, з метою селекції зображень об'єкту на фоні загального сюжету, наприклад, з використанням суматорів типу К 134 ІМ5 [6]. Таким чином, спосіб, що пропонується, в порівнянні з прототипом, у випадку непотрапляння об'єкту до зони стереоскопічного спостереження комплексу ОЕЗ, дозволяє визначити паралактичну відстань між зображеннями кінцевовіддаленого, по відношенню до спостерігача, об'єкту на фоні безкінцевовіддаленого загального сюжету за рахунок формування інтегрованих кадрів, розміри яких відповідають розмірам, потрібним для вирішення цієї задачі, полів зору ОЕЗ, за рахунок суміщення МПЗ по випадковим зоряним узорам. Підвищення точності визначення дальності об'єктів, при реалізації способу, що пропонується, досягається за рахунок можливості одночасового значного збільшення, як фокусної відстані оптичних систем кожного з засобів якими спостерігають, так і базової відстані між ними. Наведемо співвідношення для розрахунку величини середнього квадратичного відхилення (СКВ) визначення дальності запропонованим способом: s= 2H4 H2 2 H2 2 2 ((N - 1)sco + s2 + n2sсинхр. ) + 2 sB + 2 s2, o f 2 2 Bf B f (1) де: В - база, відстань між засобами; f - фокусна відстань об'єктивів обох засобів; sсо - СКВ прив'язки кадрів; sо - СКВ телевізійного координатора; sсінхр. - СКВ системи синхронізації по часу; n - швидкість об'єкту sf - СКВ фокусної відстані оптики; sВ - СКВ бази; Н - дальність об'єкту N - кількість суміжних по простору миттєвих полів зору, що увійшли до інтегрованого кадру. Таким чином, реалізація способу, що пропонується, дає можливість отримати зображення об'єкту на фоні загального сюжету кожним з засобів комплексу і визначити паралактичну відстань між відселектованими зображеннями при непотраплянні об'єктів до зони стереоскопічного спостереження оптико-електронних засобів комплексу. Можливість, у цьому разі, одночасного значного збільшення, як фокусної відстані оптичних систем кожного з спостережних засобів, так і базової відстані між ними, як видно з формули (1), дозволить підвищити точність визначення дальності. Джерела інформації 1. Оптико-механические приборы. Кулагин С.В., Дикарев В.Н., Мосягин Г.М., Лебедев Е.Н., Зубарев В.Е., Гоменюк А.С. - М.: Машиностроение, 1975. – 264 с. 2. Теоретические основы радиолокации. Ширман Я.Д., Голиков В.Н., Бусыгин И.Н., Костин Г.А., Манжос В.Н., Минервин Н.Н., Найденов Б.В., Поляков В.И., Челпанов А.С. Под ред. Ширмана. - М.: Советское радио, 1970. - 496 с. 3. Патент. США. № 4189232 от 19.03.1980. Публикация т. 991 № 3. Способ и аппарат для определения дальности. (Прототип). 4. Телевизионная астрономия. Абраменко А.Н., Агапов Е.С., Анисимов В.Ф., Галинский Н.Д., Прокофьева В.В. Под ред. Никонова. М.: Наука, 1983. - 239 с. 5. Козубовский С.Ф. Корреляционные экстремальные системы. Справочник. - Киев: Наукова думка, 1973. - 230 с. 6. Справочник по устройствам цифровой обработки информации. Виноградов Н.А., Яковлев В.Н., Воскресенский В.В., Василевич Л.Ф., Бойко Ю.В., Падалко О.А. Под ред. Яковлева В.Н. - Киев: Техника, 1988. - 415 с. 3 31334 Фіг. 1 Фіг. 2 Фіг. 3а Фіг. 3б 4 31334 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2002 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 35 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 5
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of object range
Автори англійськоюDanyk Yurii Hryhorovych
Назва патенту російськоюСпособ определения дальности объектов
Автори російськоюДаник Юрий Григорьевич
МПК / Мітки
МПК: G01C 3/00
Мітки: спосіб, об'єктів, визначення, дальності
Код посилання
<a href="https://ua.patents.su/5-31334-sposib-viznachennya-dalnosti-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення дальності об’єктів</a>
Спосіб визначення дальності
Номер патенту: 3056
Опубліковано: 26.12.1994
Автори: Квашньов Юрій Олександрович, Скрипник Юрій Олексійович, Глазков Леонід Олександрович
МПК: G01S 13/12
Мітки: визначення, спосіб, дальності
Формула / Реферат:
Способ определения дальности, основанный на излучении в сторону контролируемого объекта исходной последовательности зондирующих радиоимпульсов, приеме отраженных радиоимпульсов, сравнении с излученными по времени их следования, изменении частоты следования зондирующих радиоимпульсов исходной последовательности, определении момента совпадения во времени отраженных радиоимпульсов с последующими излученными исходными зондирующими...
Спосіб визначення дальності захистноі дії під час випереджаючої надробітки пластів
Номер патенту: 20625
Опубліковано: 05.08.1997
Автори: Новічіхін Іван Олексійович, Тихоліз Олександр Михайлович, Южанін Ілля Андрійович, Євдокімова Віра Петрівна
МПК: E21F 5/00
Мітки: дальності, надробітки, спосіб, дії, пластів, визначення, захистноі, випереджаючої
Формула / Реферат:
Способ определения дальности защитного действия при опережающей надработке пластов, заключающийся в том, что определяют глубину ведения горных работ, размеры очистной выработки защитного пласта и его мощность, размер защищенной зоны в почву пласта определяют из следующего соотношения: S2 = β1β2S21,где β1 - коэффициент, учитывающий мощность защитного...
Спосіб визначення дальності від літака до наземної передавальної радіостанції
Номер патенту: 15197
Опубліковано: 30.06.1997
Автори: Григорук Валерій Іванович, Бахвалов Борис Миколайович, Жуков Сергій Анатолійович, Хом'яков Олег Миколайович
МПК: C07D 401/04, C07B 61/00, C07D 215/26, B01J 27/053, A01N 43/56, C07D 215/24
Мітки: спосіб, дальності, літака, визначення, радіостанції, наземної, передавальної
Формула / Реферат:
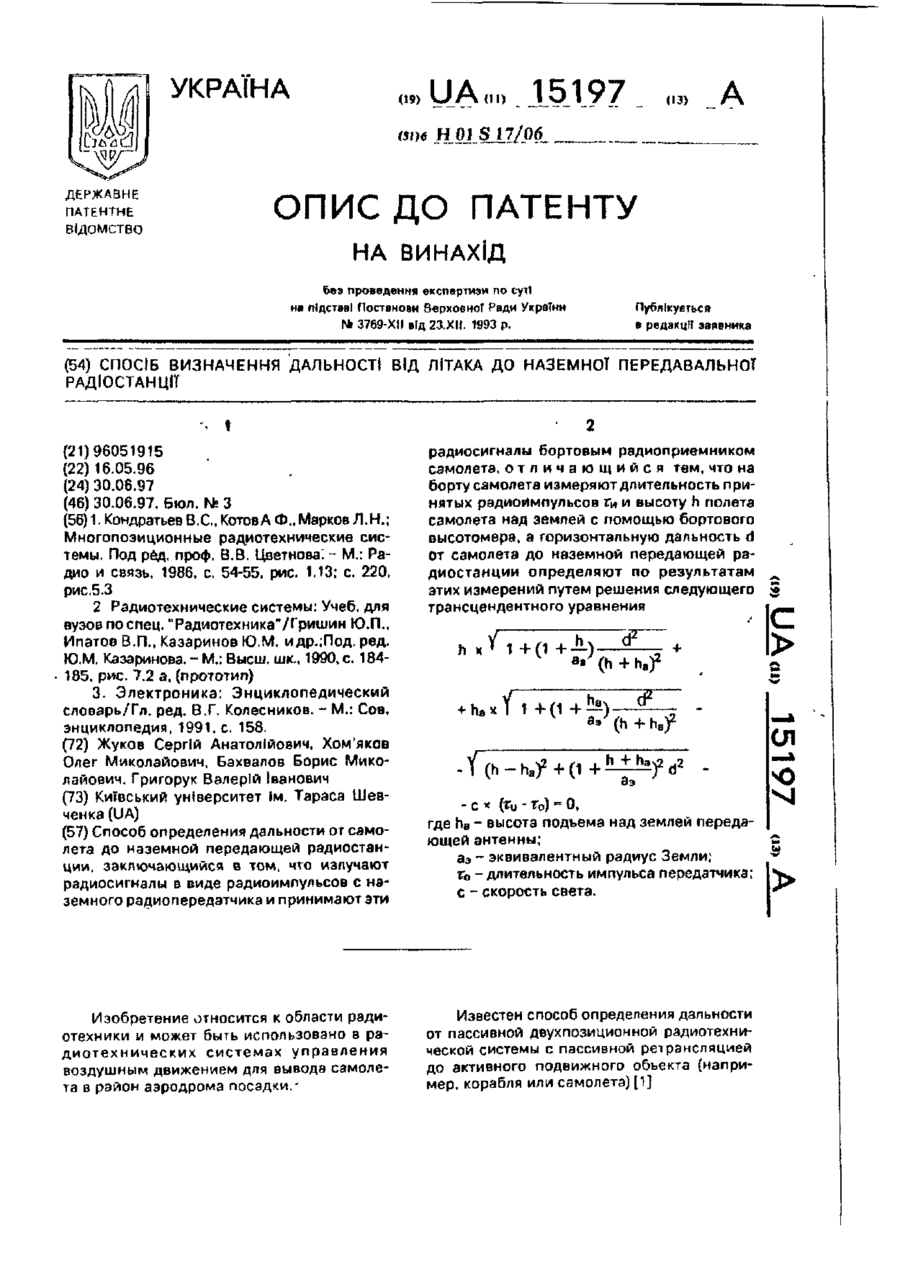
Способ определения дальности от самолета до наземной передающей радиостанции, заключающийся в том, что излучают радиосигналы в виде радиоимпульсов с наземного радиопередатчика и принимают эти радиосигналы бортовым радиоприемником самолета, отличающийся тем, что на борту самолета измеряют длительность принятых радиоимпульсов и высоту полета самолета над землей с помощью бортового высотомера, а горизонтальную дальность от самолета до...
Радіолокаційний пристрій для визначення дальності та швидкості цілі
Номер патенту: 3925
Опубліковано: 27.12.1994
Автори: Невгасимий Олександр Федорович, Гладиш Фелікс Леонідович, Кравцов Володимир Геннадєвич, Шермаревич Владлен Георгієвич, Гегечкорі Сергій Олексійович
МПК: G01S 13/00
Мітки: дальності, пристрій, швидкості, визначення, радіолокаційний, цілі
Формула / Реферат:
Радиолокационное устройство для определения дальности и скорости цели, содержащее смеситель, первый выход которого является сигнальным входом устройства, вычислитель дальности и скорости цели, выход которого является выходом устройства, отличающееся тем, что введены К гетеродинов, где К= 2, 3,....коммутатор. К сигнальных входов которого соединены с выходами К гетеродинов соответственно, а выход коммутатора подключен к второму входу смесителя,...
Пристрій для визначення дальності від літака до наземного радіопередавача
Номер патенту: 15080
Опубліковано: 30.06.1997
Автори: Бахвалов Борис Миколайович, Родін Олександр Валерійович, Жуков Сергій Анатолійович, Хом'яков Олег Миколайович
МПК: G01S 17/06
Мітки: пристрій, радіопередавача, наземного, дальності, визначення, літака
Формула / Реферат:
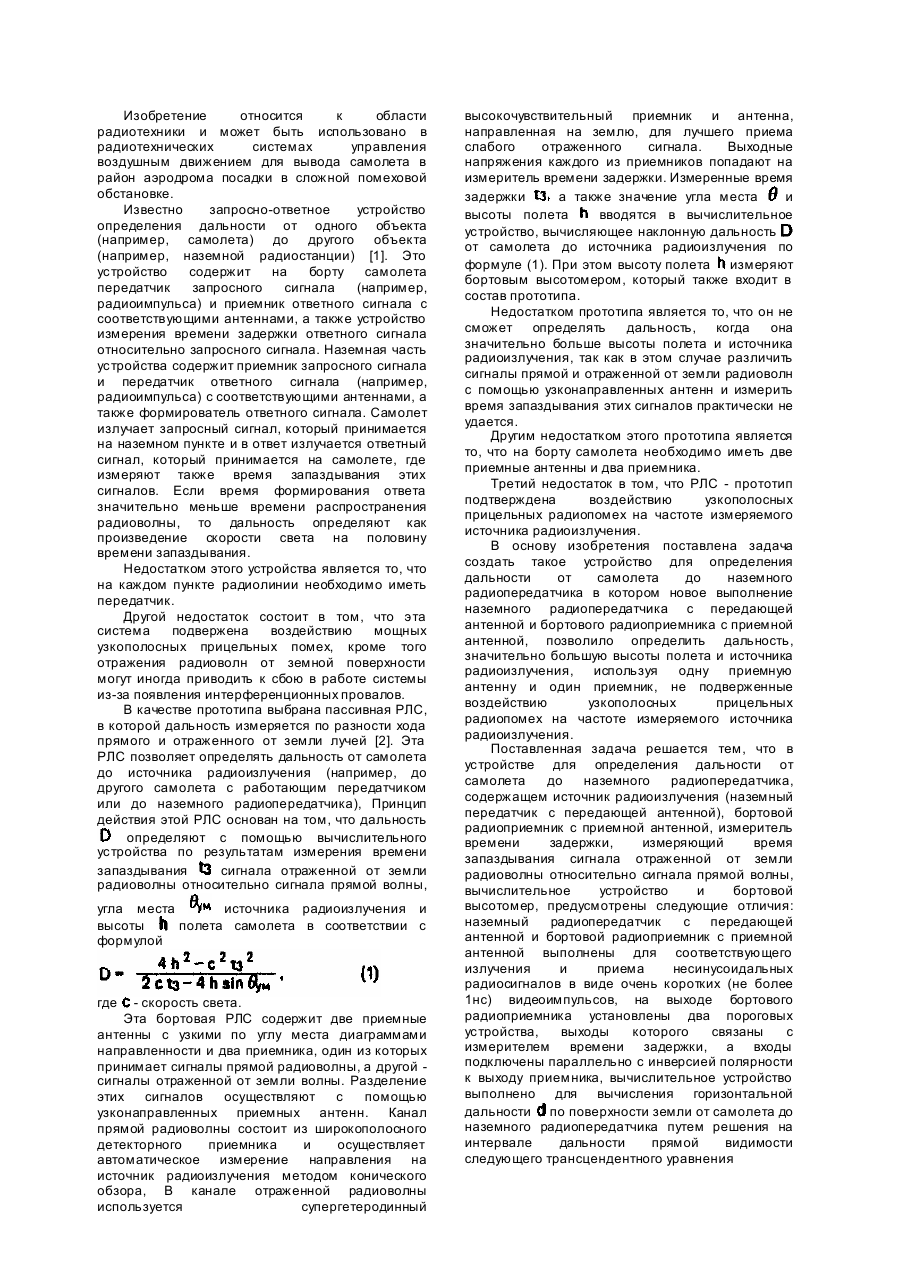
Устройство для определения дальности от самолета до наземного радиопередатчика, содержащее наземный радиопередатчик с передающей антенной, бортовой радиоприемник с приемной антенной, измеритель времени задержки, измеряющий время запаздывания сигналов отражений от земли и прямой радиоволны, вычислительное устройство и бортовой высотомер, отличающееся тем, что, передатчик с передающей антенной и приемник с приемной антенной выполнены для...
Попередній патент: Спосіб виділення малорухомих об’єктів
Наступний патент: Спосіб виявлення малорухомих об’єктів
Випадковий патент: Спосіб діагностики стану жовчовивідних шляхів та підшлункової залози у дітей