Механізм хитання кристалізатора
Номер патенту: 35318
Опубліковано: 10.09.2008
Автори: Володько Іван Леонідович, Плугатар Віктор Семенович, Оробцев Андрій Юрійович, Любімов Михайло Ювеналійович, Ткаченко Олександр Степанович, Пільгаєв Володимир Михайлович, Цупрун Олексій Юрійович, Володько Наталія Іванівна, Давидов Сергій Володимирович, Мінтус Андрій Миколайович

Формула / Реферат
Механізм хитання кристалізатора машин безперервного лиття заготовок, до складу якого входить рама, яка несе кристалізатор, зчленована з поршневими гідроциліндрами, кожний з яких оснащений датчиком положення, з'єднаним із входами електронного блока керування, а порожнини циліндрів трубопроводами зв'язані через сервоклапан, який з'єднаний з виходами електронного блока керування, із джерелом гідравлічної потужності, який відрізняється тим, що він оснащений датчиками тиску, установленими в лініях трубопроводів кожного із циліндрів і з'єднаними із входами електронного блока керування.
Текст
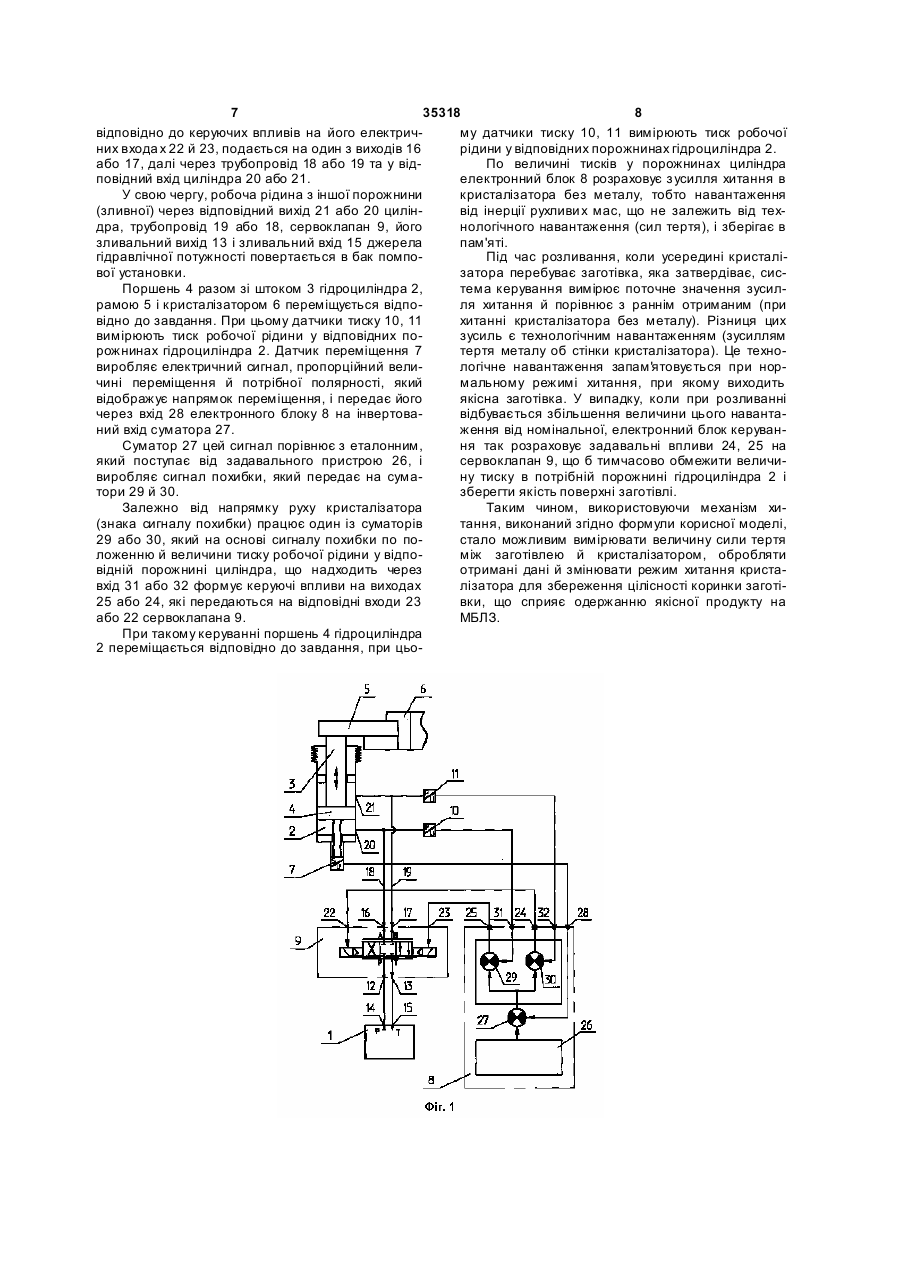
Механізм хитання кристалізатора машин безперервного лиття заготовок, до складу якого входить рама, яка несе кристалізатор, зчленована з поршневими гідроциліндрами, кожний з яких оснащений датчиком положення, з'єднаним із входами електронного блока керування, а порожнини циліндрів трубопроводами зв'язані через сервоклапан, який з'єднаний з виходами електронного блока керування, із джерелом гідравлічної потужності, який відрізняється тим, що він оснащений датчиками тиску, установленими в лініях тр убопроводів кожного із циліндрів і з'єднаними із входами електронного блока керування. (19) (21) u200804967 (22) 17.04.2008 (24) 10.09.2008 (46) 10.09.2008, Бюл.№ 17, 2008 р. (72) ТКАЧЕНКО ОЛЕКСАНДР СТЕПАНОВИЧ, UA, ВОЛОДЬКО ІВАН ЛЕОНІДОВИЧ, U A, ДАВИДОВ СЕРГІЙ ВОЛОДИМИРОВИЧ, UA, ПЛУГАТАР ВІКТОР СЕМЕНОВИЧ, U A, ПІЛЬГАЄВ ВОЛОДИ МИР МИ ХАЙЛОВИЧ, UA, ЛЮБІМОВ МИХАЙЛО ЮВЕНАЛІЙОВИЧ, U A, ЦУПРУН ОЛЕКСІЙ ЮРІЙОВИЧ, UA, МІНТУС АНДРІЙ МИКОЛАЙОВИЧ, UA, ОРОБЦЕВ АНДРІЙ ЮРІЙОВИЧ, UA, ВОЛОДЬКО НАТАЛІЯ ІВАНІВН А, U A (73) ЗАКРИТЕ АКЦІОНЕРНЕ ТОВАРИСТВО "НОВОКРАМАТОРСЬКИЙ МАШИНОБУДІВНИЙ ЗАВОД", U A 3 35318 4 Поршень гідроциліндра разом з рухливою раприводною рамами механізму хитання, датчики мою й кристалізатором рухається нагору до верхпереміщення розташовані біля кожного приводнонього обмежувального вимикача, який при досягго елемента (гідроциліндра) або в них самих. Коненні кристалізатором крайнього верхнього жен приводний елемент (гідроциліндр) підключеположення, відключає електромагніти обох клапаний до джерела потужності (помпової станції) нів, що приводить до скидання тиску повітря в почерез керуючий пристрій (сервоклапан), який підршневій порожнині пневмоциліндра привода злиключен до виходу електронного підсилювача повального клапана й штокової порожнини помпи. тужності. При цьому поршень помпи перестає витісняти роВхід електронного блоку керування з'єднаний бочу рідину через напірний клапан у гідроциліндр, з виходом порівнювального пристрою. У свою черперший зливальний клапан пружиною піднімаєтьгу входи порівнювального пристрою, з'єднані з ся до упору в регулювальний гвинт, кристалізатор виходами датчика переміщення й задавального зупиняється й починає рух униз під дією ваги криспристрою. талізатора з елементами привода, витісняючи роМе ханізм хитання кристалізатора працює набочу рідину через перший зливальний клапан і ступним чином. створюючи тиск. У свою чергу напірний клапан Задавальний пристрій формує необхідний затиском робочої рідини й пружиною закривається, кон, реалізований за рахунок зміни величини другий зливальний клапан відкривається тиском струму або напруги та подає відповідні параметри робочої рідини, а поршень помпи під дією тиску, на один із входів порівнювального пристрою. На створюваного вагою кристалізатора, і зусилля інший його вхід надходить сигнал від датчика факзворотної пружини опускається. При досягненні тичного переміщення поршня гідроциліндра. Порікрайнього нижнього положення кристалізатора вняльний пристрій порівнює фактичне й задане цикл руху нагору повторюється. переміщення та видає керуючий вплив на вхід Для одержання якісної заготівки необхідно заелектронного підсилювача потужності, який виробезпечити закон руху кристалізатора, при якому бляє сигнал керування. Цей сигнал керування зміпри русі кристалізатора вниз протягом заданого нює настроювання сервоклапана для усунення часу (часу випередження) його швидкість повинна погрішності між заданим переміщенням і фактичбути більше швидкості витягування заготівки на ним. Таким чином, незалежно від впливу сил опопевну величину, що залежить від марки стали. ру переміщенню кристалізатору з боку заготівки, Таке перевищення швидкості хитання необхідно виконується заданий (необхідний) закон перемідля виключення адгезії («прилипання») заготівки щення кристалізатора і виходить дотримується до стінок кристалізатора, що може мати місце при необхідний час випередження для конкретної маррівності швидкостей кристалізатора й заготівки. ки стали. «Прилипання» викликає наступний розрив коринки Як видно зі сказаного, завдяки тому, що в сисй утворення нової кірки, які погіршують якість потемі керування механізмом хитання у якості керуверхні заготівки . ючого пристрою застосований регулюючий сервоУ практиці роботи МБЛЗ найбільше поширенклапан, незалежно від впливу сил опору руху ня одержав синусоїдальний закон руху кристалізакристалізатора з боку заготівки, виконується задатора, основними параметрами якого є амплітуда й ний (необхідний) законруху кристалізатора, підчастота хитання. тримується певне значення часу випередження В описаному пристрої опускання кристалізатодля різних марок сталей, а це приводить до розра вниз здійснюється тільки під його власною ваширення технологічних можливостей пристрою, гою. Збільшення сил тертя заготівки об стінки крипов'язаних з різноманітним хімічним складом месталізатора відбувається через зменшення талу. суцільності шару розплаву жужелевої суміші в заКрім того вище описане керування всім процезорі між стінкою кристалізатора й заготівкою, тому сом хитання кристалізатора дозволяє усунути одщо змінюються умови затягування цього розплаву ну із причин «прилипання» заготівки до стінок крив період зменшення швидкості руху кристалізатора сталізатора й трохи підвищити якість поверхні вниз. Зменшення швидкості може виявитися тазаготівки. ким, коли необхідний час випередження стане Однак «прилипання» металу до стінок криставідмінним від мінімальної припустимої величини лізатора, що веде до локальних порушень суцільдля кожної марки сталі, що приведе до «прилиності коринки заготівки має місце ще й через зміну пання» заготівки до стінки кристалізатора та навеличин сил тертя на гранях кристалізатора, які у ступним зниженням якості поверхні заготівки. свою чергу обумовлені складом жужельноутворюТаким чином, через неможливість регулювати вальній суміші, яка затягується в зону тертя з повесь процес хитання, пристрій має обмежені техверхні розплавленого металу в кристалізатор й нологічні можливості, пов'язані з виплавкою різних через ряд інших факторів. У процесі хитання крисмарок сталей і низьку якість поверхностей заготівталізатора сигнал керування враховує тільки факки, яка проходить через кристалізатор МБЛЗ. тичне переміщення кристалізатора, але не врахоЗа прототип обраний механізм хитання крисвує величину зусилля, прикладену до талізатора для машини безперервного лиття загокристалізатору для хитання, а величина зусилля тівки [патент DE 35 43790 А1, МПК В22 D 11/04], залежить від зміни величин сил тертя на гранях що містить кристалізатор, установлений у рамі, кристалізатора. зчленованої із приводом хитання, приводні елемеУ даному пристрої неможливо виміряти й обнти лінійного руху, виконані, наприклад, у вигляді робити величину зусилля, яке відповідає певному гідроциліндрів, які встановлені між нерухомою й режиму хи тання, що перешкоджає порушенню 5 35318 6 цілісності коринки заготівки для одержання якісної пан гідроциліндра для зміни режиму переміщення продукції на МБЛЗ. рами із кристалізатором з розрахунковим зусилТаким чином, недоліком пристрою є незадовілям, величина якого забезпечує цілісність коринки льна якість заготівки. заготівки, що сприяє одержанню якісного готового В основу корисної моделі поставлене завданпродукту. ня - одержання якісної заготівки, виробленої на Виключення з вищевказаної сукупності відмінМБЛЗ із використанням механізму хитання, який них ознак хоча б одного не забезпечує досягнення заявляється. технічного результату. Поставлене завдання вирішується за рахунок Технічне рішення, що заявляється, невідомо з технічного результату, який полягає в зміні режиму рівня техніки й тому воно є новим. переміщення рами із кристалізатором залежно від Технічне рішення, що заявляється, промисловеличини сил тертя між стінками кристалізатора й ве застосовано, тому що його технологічне й техповерхнями заготівки. нічне виконання не представляє труднощів. По Для досягнення вищевказаного результату цьому технічному рішенню розроблені робоча домеханізм хитання кристалізатора МБЛЗ до складу кументація й виготовлений механізм хитання якого входить рама, яка несе кристалізатор, зчлеМБЛЗ для ВАТ «Новоліпецький меткомбінат» (Роновану з поршневими гідроциліндрами, кожний з сія). яких оснащений датчиком положення, з'єднаним із Таким чином, технічному рішенню, що заявлявходами електронного блоку керування, а порожється може представлятися правова охорона, тонини циліндрів трубопроводами зв'язані через му що воно є новим, і промислове застосовано, сервоклапан, з'єднаний з виходами електронного тобто відповідає критеріям корисної моделі. блоку керування із джерелом гідравлічної потужКорисна модель пояснюється кресленням, на ності, відповідно до корисної моделі, механізм якому зображена: постачений датчиками тиску, установленими в Фіг.1 - схема механізму хитання кристалізатолініях тр убопроводів кожного із циліндрів і з'єднара МБЛЗ із функціональною схемою керування. ними ізвходами електронного блоку керування. Ме ханізм хитання кристалізатора МБЛЗ місУ результаті порівняльного аналізу пропонотить джерело гідравлічної потужності 1, наприваного механізму хитання кристалізатора із протоклад, помпову установку, гідроциліндр 2 зі штоком типом установлено, що вони мають наступні зага3 і поршнем 4. Шток 3 жорстко пов'язаний з рамою льні ознаки: 5 кристалізатора 6 і з датчиком положення штока - рама, яка несе кристалізатор; 7. Електрогідравлічна система керування механіз- зчленування рами з поршневими гідроцилінмом хитання включає датчик положення штока 7, драми; електронний блок керування 8, сервоклапан 9, - оснащення кожного гідроциліндра датчиком датчики тиску 10 й 11.Напірний вхід 12 і зливальположення; ний вихід 13 сервоклапана 9 з'єднані, відповідно, з - зв'язок порожнин циліндрів трубопроводами напірним виходом 14 і зливальним входом 15 через сервоклапан із джерелом гідравлічної потуджерела гідравлічної потужності. Виходи 16 й 17 жності; сервоклапана 9 з'єднані трубопроводами 18 й 19 з - з'єднання сервоклапана з виходами електровідповідними входами 20 й 21 гідроциліндра 2. нного блоку керування; Електричні входи 22 й 23 сервоклапана 9 з'єд- з'єднання датчика положення із входами нані з відповідними виходами 24 й 25 електронноелектронного блоку керування, го блоку керування 8. Вихід задавального приа також відмінні ознаки: строю 26 з'єднаний з неінвертованим входом - постачання датчиками тиску; суматора 27, інвертований вхід суматора 27 з'єд- установка датчиків тиску в лініях трубопронаний через вхід 28 електронного блоку 8 з датчиводів кожного із циліндрів; ком положення штока циліндра 7 (зворотний зв'я- з'єднання датчиків тиску із входами електрозок по положенню), вихід суматора 27 підключений нного блоку керування. до неінвертованих входів суматорів 29, 30. ІнверТаким чином, запропонований механізм хитовані входи 31 й 32 суматорів 29, 30 з'єднані з тання кристалізатора має нові вузли, нові зв'язки відповідними датчиками тиску 10 й 11 (зворотний вузлів і деталей, а також нове розміщення їх відзв'язок по тиску/зусиллю), які встановлені в лініях носно один одного. трубопроводів 17, 18 гідроциліндра 2. Між відмінними ознаками й технічним резульПристрій працює наступним чином. татом, який досягається існує причинноПеред початком роботи шток 3 циліндра 2 і наслідковий зв'язок. рама 5 із кристалізатором 6 перебуває в деякому Завдяки тому, що механізм хитання кристалісередньому положенні, обумовленому механічнизатора МБЛЗ постачений датчиками тиску, устами упорами (не показані на малюнку). Включають новленими в лініях трубопроводів кожного із циліелектрогідравлічну систему керування (7, 8, 9, 10, ндрів і з'єднаними із входами електронного блоку 11), яка по датчику положення 7 запам'ятовує кокерування, стало можливим вимірювати величини ординату цього (нульового) положення, далі вклютиску в порожнинах циліндрів, (тобто вимірювати чають джерело гідравлічної потужності 1 і задавасилу тертя між стінками кристалізатора й заготівльний пристрій 26 електронного блоку керування кою) і передавати цю інформацію в електронний 8. блок керування, а в блоці керування на основі При цьому робоча рідина з напірного виходу отриманих поточних значень параметрів процесу 14 джерела гідравлічної потужності 1 надходить у хитання вироблять керуючий вплив на сервокланапірний вхід 12 сервоклапана 9, а далі з нього, 7 35318 8 відповідно до керуючих впливів на його електричму датчики тиску 10, 11 вимірюють тиск робочої них входа х 22 й 23, подається на один з виходів 16 рідини у відповідних порожнинах гідроциліндра 2. або 17, далі через трубопровід 18 або 19 та у відПо величині тисків у порожнинах циліндра повідний вхід циліндра 20 або 21. електронний блок 8 розраховує з усилля хитання в У свою чергу, робоча рідина з іншої порожнини кристалізатора без металу, тобто навантаження (зливної) через відповідний вихід 21 або 20 цилінвід інерції рухливи х мас, що не залежить від техдра, трубопровід 19 або 18, сервоклапан 9, його нологічного навантаження (сил тертя), і зберігає в зливальний вихід 13 і зливальний вхід 15 джерела пам'яті. гідравлічної потужності повертається в бак помпоПід час розливання, коли усередині кристалівої установки. затора перебуває заготівка, яка затвердіває, сисПоршень 4 разом зі штоком 3 гідроциліндра 2, тема керування вимірює поточне значення зусилрамою 5 і кристалізатором 6 переміщується відполя хитання й порівнює з раннім отриманим (при відно до завдання. При цьому датчики тиску 10, 11 хитанні кристалізатора без металу). Різниця цих вимірюють тиск робочої рідини у відповідних позусиль є технологічним навантаженням (зусиллям рожнинах гідроциліндра 2. Датчик переміщення 7 тертя металу об стінки кристалізатора). Це техновиробляє електричний сигнал, пропорційний велилогічне навантаження запам'ятовується при норчині переміщення й потрібної полярності, який мальному режимі хитання, при якому виходить відображує напрямок переміщення, і передає його якісна заготівка. У випадку, коли при розливанні через вхід 28 електронного блоку 8 на інвертовавідбувається збільшення величини цього навантаний вхід суматора 27. ження від номінальної, електронний блок керуванСуматор 27 цей сигнал порівнює з еталонним, ня так розраховує задавальні впливи 24, 25 на який поступає від задавального пристрою 26, і сервоклапан 9, що б тимчасово обмежити величивиробляє сигнал похибки, який передає на суману тиску в потрібній порожнині гідроциліндра 2 і тори 29 й 30. зберегти якість поверхні заготівлі. Залежно від напрямку руху кристалізатора Таким чином, використовуючи механізм хи(знака сигналу похибки) працює один із суматорів тання, виконаний згідно формули корисної моделі, 29 або 30, який на основі сигналу похибки по постало можливим вимірювати величину сили тертя ложенню й величини тиску робочої рідини у відпоміж заготівлею й кристалізатором, обробляти відній порожнині циліндра, що надходить через отримані дані й змінювати режим хитання криставхід 31 або 32 формує керуючі впливи на виходах лізатора для збереження цілісності коринки заготі25 або 24, які передаються на відповідні входи 23 вки, що сприяє одержанню якісної продукту на або 22 сервоклапана 9. МБЛЗ. При такому керуванні поршень 4 гідроциліндра 2 переміщається відповідно до завдання, при цьо 9 Комп’ютерна в ерстка А. Крижанівський 35318 Підписне 10 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюTilting mechanism of crystallizing pan
Автори англійськоюTkachenko Oleksandr Stepanovych, Volodko Ivan Leonidovych, Davydov Serhii Volodymyr, Pluhatar Viktor Semenovych, Pilhaiev Volodymyr Mykhailovych, Liubimov Mykhailo Yuvenaliovych, Tsuprun Oleksii Yuriiovych, Mintus Andrii Mykolaiovych, Orobtsev Andrii Yuriiovych, Volodko Natalia Ivanivna
Назва патенту російськоюМеханизм качания кристаллизатора
Автори російськоюТкаченко Александр Степанович, Володько Иван Леонидович, Давыдов Сергей Владимирович, Плугатар Виктор Семенович, Пильгаев Владимир Михайлович, Любимов Михаил Ювеналиевич, Цупрун Алексей Юрьевич, Минтус Андрей Николаевич, Оробцев Андрей Юрьевич, Володько Наталья Ивановна
МПК / Мітки
МПК: B22D 11/04
Мітки: хитання, кристалізатора, механізм
Код посилання
<a href="https://ua.patents.su/5-35318-mekhanizm-khitannya-kristalizatora.html" target="_blank" rel="follow" title="База патентів України">Механізм хитання кристалізатора</a>
Механізм хитання кристалізатора

Номер патенту: 16293
Опубліковано: 15.08.2006
Автори: Білобров Юрій Миколайович, Титаренко Олександр Іванович, Кочин Леонід Павлович, Плугатар Віктор Семенович, Вольвач Олександр Євгенійович, Шмуліч Владислав Леонідович, Курмаз Ігор Володимирович
МПК: B22D 11/04
Мітки: механізм, кристалізатора, хитання
Формула / Реферат:
1. Механізм хитання кристалізатора, що містить рухомий стіл для установлення кристалізатора і нерухому раму з гідроциліндром, шток якого зв'язаний із зазначеним рухомим столом, а також пружні елементи, які лежать в площинах, що виходять з центра дуги хитання, і кожний з яких розміщений між нерухомою рамою і рухомим столом із жорстким кріпленням на них країв зазначених пружних елементів, який відрізняється тим, що він оснащений дистанційними...
Механізм хитання кристалізатора
Номер патенту: 73040
Опубліковано: 16.05.2005
Автори: Білобров Юрій Миколайович, Плугатар Віктор Семенович, Кірєєв Владімір Ніколаєвич, Кочин Леонід Павлович, Сусь Юрій Васильович, Баначенков Владімір Гєннадієвич
МПК: B22D 11/053
Мітки: хитання, механізм, кристалізатора
Формула / Реферат:
Механізм хитання кристалізатора, до складу якого входять стіл кристалізатора, верхня і нижня напрямні, що лежать у площинах, які утворюють двогранний кут, пристрій натягу напрямних, кожна з яких одним кінцем прикріплена до стаціонарної рами, який відрізняється тим, що пристрій натягу напрямних виконаний у вигляді двох симетрично встановлених відносно подовжньої осі рами плунжерних циліндрів, корпуси яких шарнірно приєднані до рами і жорстко...
Механізм хитання кристалізатора
Номер патенту: 4235
Опубліковано: 17.01.2005
Автори: Білобров Юрій Миколайович, Кочин Леонід Павлович, Лепіхов Леонід Сергійович, Сусь Юрій Васильович
МПК: B22D 11/04
Мітки: кристалізатора, хитання, механізм
Формула / Реферат:
1. Механізм хитання кристалізатора, до складу якого входить кристалізатор, розміщений у рамі, з’єднаний з гідроприводом її переміщення і встановлений у корпусі за допомогою пружних напрямних, жорстко приєднаних до країв рами і з'єднаних з корпусом, і пружини, розташовані між рамою і корпусом по краях рами, який відрізняється тим, що він обладнаний не менш ніж двома пневматичними ланками змінної довжини, з'єднаними із системою керування подачі...
Механізм хитання кристалізатора
Номер патенту: 77760
Опубліковано: 15.01.2007
Автори: Тіунов Володимир Миколайович, Кочин Леонід Павлович, Плугатар Віктор Семенович, Панченко Володимир Михайлович, Гордієнко Олександр Володимирович, Литвинов Олександр Васильович, Вольвач Олександр Євгенійович
МПК: B22D 11/04
Мітки: механізм, кристалізатора, хитання
Формула / Реферат:
Механізм хитання кристалізатора, що включає стіл кристалізатора, верхню і нижню пружні напрямні, які лежать у площинах, що утворюють двогранний кут, кожна напрямна одним кінцем прикріплена до столу кристалізатора, а іншим - до стаціонарної рами, циліндри для натягу верхньої і нижньої пружних напрямних, які розташовані у бісекторній площині двогранного кута, утвореного нижньою і верхньою пружними напрямними, який відрізняється тим, що він...
Механізм хитання кристалізатора вертикальної слябової машини безперервного лиття
Номер патенту: 24353
Опубліковано: 25.06.2007
Автори: Титаренко Олександр Іванович, Козлов Павло Миколайович, Романенко Віталій Володимирович, Цибулько Анатолій Євгенійович
МПК: B22D 11/04
Мітки: хитання, кристалізатора, механізм, вертикальної, лиття, безперервного, машини, слябової
Формула / Реферат:
Механізм хитання кристалізатора вертикальної слябової машини безперервного лиття, що включає раму з кристалізатором, до середньої частини якої з двох боків жорстко прикріплено по поздовжньому коробу напрямного вузла з пакетом ресор, розміщеним у його внутрішній порожнині і жорстко приєднаним своєю середньою частиною до фундаментної стійки та зчленованим кінцями з елементами кріплення і розтягання, а також розміщені по кутах рами привідні...
Попередній патент: Спосіб поховання твердих відходів содових виробництв в підземних соляних камерах
Наступний патент: Сплав на основі заліза
Випадковий патент: Дегазаційна установка