Датчик лінійних переміщень
Номер патенту: 37760
Опубліковано: 10.12.2008
Автори: Гордін Олександр Григорович, Рева Вікторія Валеріївна


Формула / Реферат
Датчик лінійних переміщень, що містить корпус, напрямну призму, ролик і систему обробки інформації, яка включає дві струнні пружні розтяжки, закріплені одними своїми кінцями на центральному вузлі закріплення, другими - на бокових вузлах закріплення, а кожна струнна пружна розтяжка знаходиться у полі постійного магніту, а центральний вузол закріплення з'єднаний з рухомою рамою за допомогою пружних елементів, розташованих симетрично відносно поздовжньої осі рами, бокові вузли закріплення струнних пружних розтяжок з'єднані з корпусом, який відрізняється тим, що напрямна призма встановлена нерухомо відносно корпусу об'єкта, введена рухома каретка, яка з'єднана з рухомою частиною об'єкта і вміщує перший гідроциліндр, ролик, зв'язаний нерухомо з поршнем першого гідроциліндра, другий гідроциліндр з пружним сильфоном, гідромагістраль, яка зв'язує перший гідроциліндр з другим гідроциліндром, а пружний сильфон другого гідроциліндра через вихідний шток з'єднаний з рухомою рамою.
Текст
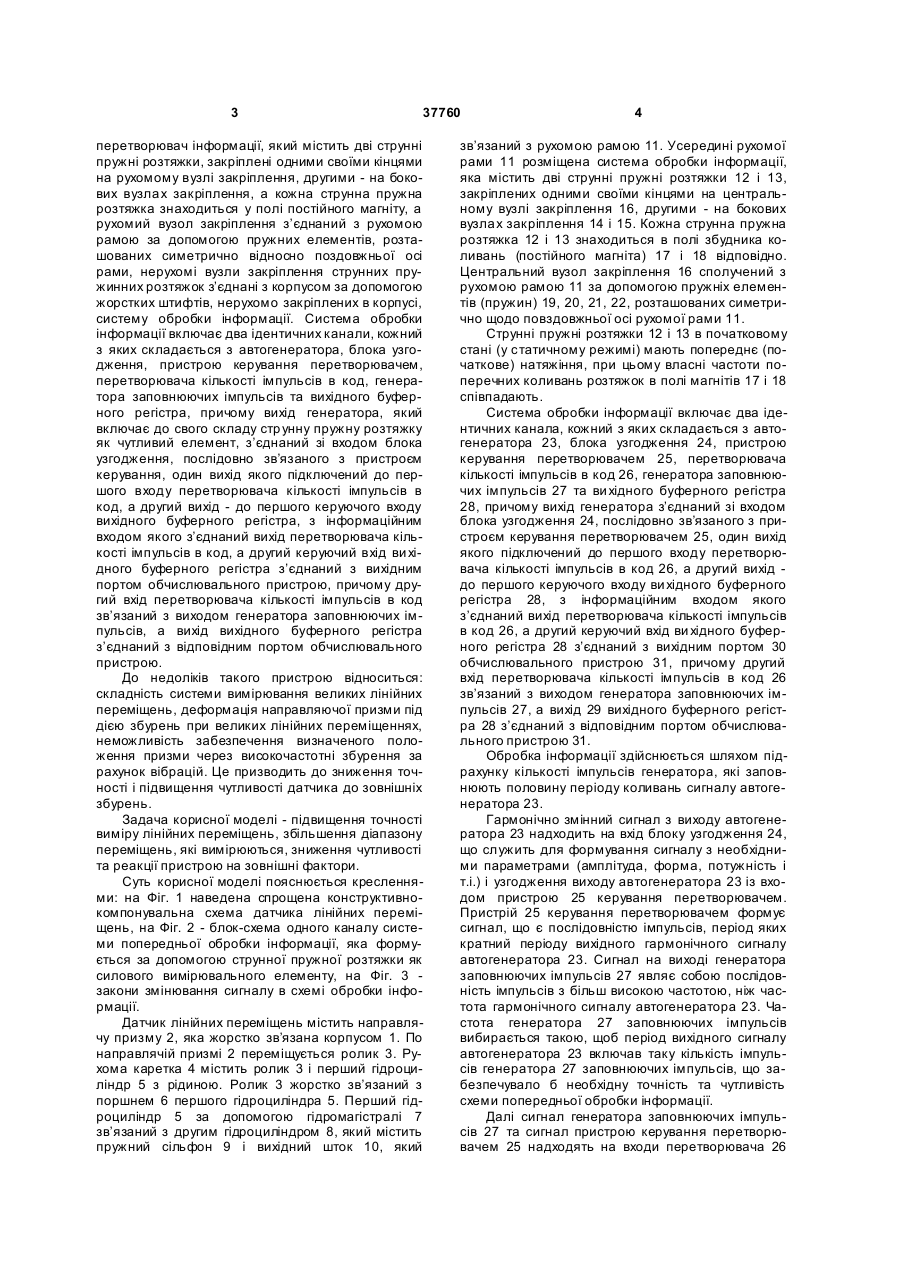
Датчик лінійних переміщень, що містить корпус, напрямну призму, ролик і систему обробки інформації, яка включає дві струнні пружні розтяжки, закріплені одними своїми кінцями на центральному вузлі закріплення, другими - на бокових вузлах закріплення, а кожна струнна пружна розтяжка 3 37760 перетворювач інформації, який містить дві струнні пружні розтяжки, закріплені одними своїми кінцями на рухомому вузлі закріплення, другими - на бокових вузлах закріплення, а кожна струнна пружна розтяжка знаходиться у полі постійного магніту, а рухомий вузол закріплення з’єднаний з рухомою рамою за допомогою пружних елементів, розташованих симетрично відносно поздовжньої осі рами, нерухомі вузли закріплення струнних пружинних розтяжок з’єднані з корпусом за допомогою жорстких штифтів, нерухомо закріплених в корпусі, систему обробки інформації. Система обробки інформації включає два ідентичних канали, кожний з яких складається з автогенератора, блока узгодження, пристрою керування перетворювачем, перетворювача кількості імпульсів в код, генератора заповнюючих імпульсів та вихідного буферного регістра, причому вихід генератора, який включає до свого складу стр унну пружну розтяжку як чутливий елемент, з’єднаний зі входом блока узгодження, послідовно зв’язаного з пристроєм керування, один вихід якого підключений до першого входу перетворювача кількості імпульсів в код, а другий вихід - до першого керуючого входу вихідного буферного регістра, з інформаційним входом якого з’єднаний вихід перетворювача кількості імпульсів в код, а другий керуючий вхід ви хідного буферного регістра з’єднаний з вихідним портом обчислювального пристрою, причому другий вхід перетворювача кількості імпульсів в код зв’язаний з виходом генератора заповнюючих імпульсів, а вихід вихідного буферного регістра з’єднаний з відповідним портом обчислювального пристрою. До недоліків такого пристрою відноситься: складність системи вимірювання великих лінійних переміщень, деформація направляючої призми під дією збурень при великих лінійних переміщеннях, неможливість забезпечення визначеного положення призми через високочастотні збурення за рахунок вібрацій. Це призводить до зниження точності і підвищення чутливості датчика до зовнішніх збурень. Задача корисної моделі - підвищення точності виміру лінійних переміщень, збільшення діапазону переміщень, які вимірюються, зниження чутливості та реакції пристрою на зовнішні фактори. Суть корисної моделі пояснюється кресленнями: на Фіг. 1 наведена спрощена конструктивнокомпонувальна схема датчика лінійних переміщень, на Фіг. 2 - блок-схема одного каналу системи попередньої обробки інформації, яка формується за допомогою струнної пружної розтяжки як силового вимірювального елементу, на Фіг. 3 закони змінювання сигналу в схемі обробки інформації. Датчик лінійних переміщень містить направлячу призму 2, яка жорстко зв’язана корпусом 1. По направлячій призмі 2 переміщується ролик 3. Рухома каретка 4 містить ролик 3 і перший гідроциліндр 5 з рідиною. Ролик 3 жорстко зв’язаний з поршнем 6 першого гідроциліндра 5. Перший гідроциліндр 5 за допомогою гідромагістралі 7 зв’язаний з другим гідроциліндром 8, який містить пружний сільфон 9 і вихідний шток 10, який 4 зв’язаний з рухомою рамою 11. Усередині рухомої рами 11 розміщена система обробки інформації, яка містить дві струнні пружні розтяжки 12 і 13, закріплених одними своїми кінцями на центральному вузлі закріплення 16, другими - на бокових вузлах закріплення 14 і 15. Кожна струнна пружна розтяжка 12 і 13 знаходиться в полі збудника коливань (постійного магніта) 17 і 18 відповідно. Центральний вузол закріплення 16 сполучений з рухомою рамою 11 за допомогою пружніх елементів (пружин) 19, 20, 21, 22, розташованих симетрично щодо повздовжньої осі рухомої рами 11. Струнні пружні розтяжки 12 і 13 в початковому стані (у статичному режимі) мають попереднє (початкове) натяжіння, при цьому власні частоти поперечних коливань розтяжок в полі магнітів 17 і 18 співпадають. Система обробки інформації включає два ідентичних канала, кожний з яких складається з автогенератора 23, блока узгодження 24, пристрою керування перетворювачем 25, перетворювача кількості імпульсів в код 26, генератора заповнюючих імпульсів 27 та ви хідного буферного регістра 28, причому вихід генератора з’єднаний зі входом блока узгодження 24, послідовно зв’язаного з пристроєм керування перетворювачем 25, один вихід якого підключений до першого входу перетворювача кількості імпульсів в код 26, а другий вихід до першого керуючого входу ви хідного буферного регістра 28, з інформаційним входом якого з’єднаний вихід перетворювача кількості імпульсів в код 26, а другий керуючий вхід ви хідного буферного регістра 28 з’єднаний з вихідним портом 30 обчислювального пристрою 31, причому другий вхід перетворювача кількості імпульсів в код 26 зв’язаний з виходом генератора заповнюючих імпульсів 27, а вихід 29 вихідного буферного регістра 28 з’єднаний з відповідним портом обчислювального пристрою 31. Обробка інформації здійснюється шляхом підрахунку кількості імпульсів генератора, які заповнюють половину періоду коливань сигналу автогенератора 23. Гармонічно змінний сигнал з виходу автогенератора 23 надходить на вхід блоку узгодження 24, що служить для формування сигналу з необхідними параметрами (амплітуда, форма, потужність і т.і.) і узгодження виходу автогенератора 23 із входом пристрою 25 керування перетворювачем. Пристрій 25 керування перетворювачем формує сигнал, що є послідовністю імпульсів, період яких кратний періоду вихідного гармонічного сигналу автогенератора 23. Сигнал на виході генератора заповнюючих імпульсів 27 являє собою послідовність імпульсів з більш високою частотою, ніж частота гармонічного сигналу автогенератора 23. Частота генератора 27 заповнюючих імпульсів вибирається такою, щоб період вихідного сигналу автогенератора 23 включав таку кількість імпульсів генератора 27 заповнюючих імпульсів, що забезпечувало б необхідну точність та чутливість схеми попередньої обробки інформації. Далі сигнал генератора заповнюючих імпульсів 27 та сигнал пристрою керування перетворювачем 25 надходять на входи перетворювача 26 5 37760 кількості імпульсів в код, причому перетворювач кількості імпульсів в код містить керований лічильник, який перетворює означену кількість імпульсів за обраний проміжок часу в числовий код. Такий проміжок часу вибирається кратним періоду гармонічного сигналу автогенератора 23. Початкова корисна інформація зберігається у вихідному буферному регістрі 28 перед подальшим перетворенням за допомогою обчислювальних засобів. З вихідного регістру 28 інформація у кодовому вигляді видається за допомогою шини 29. Вхід 30 буферного регістру 28 необхідний для подачі на нього керуючого сигналу зчитування (виборки) інформації. На фігурі 3 наведені закони змінювання сигналу в схемі обробки інформації: SАГ - сигнал на виході автогенератора 23, SПКП - сигнал на виході пристрою 25 керування перетворювачем, SГЗІ сигнал на виході генератора заповнюючих імпульсів 27, SЛ - сигнал на виході лічильника перетворювача частоти в код 26. Датчик лінійних переміщень працює наступним чином: рухома каретка 4 з роликом 3 переміщується вздовж похилої площини нерухомого елементу - направляючої призми 2. Ролик 3 переміщується вертикально. Змінюються об’єм першого гідроциліндра 5 і тиск в ньому. Також змінюється тиск у гідравлічній магістралі 7 та у другому гідроциліндрі 8. Сила прикладається до пружнього сільфону 9 і рухомої рами 11, змінюється стан пружних елементів 19, 20, 21, 22. З’являється зусилля, прикладене до центрального вузла закріплення 16 струнних пружних розтяжок 12 і 13. Змінюється частоти коливань обох струнних пружних розтяжок 12 і 13. Залежність частоти коливань струнної пружної розтяжки 12 від сили натяжіння має такий вигляд: n2F f = , (1) 4ml 2 де m - маса струнної пружної розтяжки 12; l - довжина струнної пружної розтяжки 12; F - сила натяжіння струнної пружної розтяжки 12. 1 n F f= = T 2 ml , (2) або n - номер гармоніки коливань пружної струнної розтяжки 12; Т - період коливань струнної пружної розтяжки 12. Вважаємо, що схема системи обробки інформації (Фіг. 2) настроєна на виділення першої гармоніки коливань струнної пружної розтяжки 12 (n=1). В тому випадку, якщо сила натяжіння струнної пружньої розтяжки 12 змінюється відносно початкового її значення Fo на величину AF, співвідношення (2) для частоти власних коливань струнної пружної розтяжки 12 можливо представити так: f = f0 + D f = 1 F0 + DF 2 ml , (3) 6 де f0 - частота власних коливань струнної пружної розтяжки 12 в початковому стані, Df - зміна частоти власних коливань. Приріст (зміну) сили натяжіння струнної пружної розтяжки 12 наведемо у наступному вигляді: ESDl DF = l , (4) де Dl - подовження струнної пружної розтяжки 12, яке відповідає приросту (зміні) DF сили натяжіння; Е - модуль пружності матеріалу струнної пружної розтяжки 12; S - площа поперечного перерізу струнної пружної розтяжки 12. Тепер співвідношення (3) наведемо у наступному вигляді: 1 F0 ES + Dl 2 ml ml2 . (5) Вертикальне переміщення ролика 3 в залежності від повздовжнього положення каретки 4 можна представити: y = kx, (6) де х - повздовжній хід каретки 4 відносно початкового стану (х може бути позитивним чи негативним); у - хід ролика 3; k - коефіцієнт нахилу площини, по якій переміщується ролик 3 (k = const). Співвідношення між об’ємом першого гідроциліндра 5 та тиском в ньому приблизно можна представити так: P10 V11 = P11 V10 , (7) f = f0 + D f = Р10, Р 11 - тиск в гідравлічній системі та у першому гідроциліндрі 5 в початковому стані ролика 3 та в стані, обумовленному зміщенням каретки 4 відповідно; V10, V11 - об’єм гідравлічної системи 5 (першого гідроциліндра) P V P11 = 10 11 V11 ; або вважаємо, що P10, V10 = const. Об’єм V11 можна представити так: V11 = Vw + DV, (8) DV - зміна об’єму гідравлічної системи 5 (першого гідроциліндра), яка обумовлена зміною положення ролика 3 при повздовжньому переміщенні каретки 4; 2 2 DV = pR1 h1 - pR2h2 = pR1 y 1 ,; y=h1-h2 , або з урахуванням рівняння (6) 2 DV = pR1 kx . (9) Тиск у гідравлічній системі і в першому гідроциліндрі 5: P V P10 V10 P10 V10 P11 = 10 10 = = 2 V10 + DV V10 + pR 1kx V10 + S1kx , (10) де S1 - площина поперечного перетину першого гідроциліндра 5. Тиск в другому гідроциліндрі 8: 7 37760 P10 V10 V10 + S1kx . (11) Сільфон другого гідроциліндра 8 як пружний елемент розвиває зусилля на його вихідному штоці 10: P V S Fc = P21S2 = 10 10 2 V10 + S1kx , (12) P21 = P11 = S2 - площина поперечного перетину другого гідроциліндра 9. Ця сила обумовлює хід рухомої рами 11, зв’язаної з центральним вузлом закріплення 16 струнних пружних розтяжок 12 і 13 через пружні елементи 19, 20, 21, 22. Таким чином, силу, яка прикладена до центрального вузла закріплення 16 можна представити так: Fц = Fc = P11 = P10 V10 S 2 V10 + S 1kx , (13) Зміна сили натяжіння струнних пружних розтяжок 12 і 13: DF = Fц , (14) Повна сила натяжіння струнних пружних розтяжок 12 і 13: F = F 0±Fц , (15) Частоти власних коливань струнних пружних розтяжок 12 і 13: 1 æ F +F ö 1 æ F - Fц ö ÷ f12 2 = ç 0 ц ÷; f132 = ç 0 4 ç ml ÷ 4 ç ml ÷ è ø è ø (16) або P V S ö P V S ö æ æ ç F0 + 10 10 2 ÷ ç F0 - 10 10 2 ÷ 1 V10 + S1kx ÷ 2 1 ç V10 + S1kx ÷ f12 2 = ç ÷; f13 = 4 ç ÷ 4ç ml ml ç ÷ ç ÷ è ø è ø. (17) Виділення інформації про лінійне переміщення х можливо за допомогою використання будь-якої зі струнних пружних розтяжок, наприклад, струнної пружної розтяжки 12. Частота та період ії власних коливань: 1 1 f12 = T12 = T12 , f12 ,(18) де Т12 - період власних коливань струнної пружної розтяжки 12. При використанні принципу заповнювання на півперіоду коливань струнної пружної розтяжки 12 імпульсами високої частоти їх кількість визначається таким співвідношенням: 1 f2 T12 n= 2 , (19) 8 де f3 - частота заповнюючих імпульсів. Тобто: 1 f3 n= 2 f12 , (20) У відповідності до (17): é P V S ù ê F0 + 10 10 2 ú 1 ê1 V10 + S1kx ú n= ê × ú 2 4 ml ê ú ê ú ë û 1 2 . (21) Маємо залежність, яку необхідно було отримати: X = x(n). (22) Реалізація отриманої залежності (21) за допомогою обчислювального пристрою дає можливість знайти лінійне переміщення х. Таким чином, використання в датчику лінійних переміщень направляючої призми, рухомої каретки з роликом, яка з’єднана з рухомою частиною об’єкта і вміщує перший гідроциліндр, другий гідроциліндр з пружним сільфоном, гідромагістраль, яка зв’язує перший гідроциліндр з другим гідроциліндром, а пружний сільфон другого гідроциліндра через вихідний шток з’єднаний з рухомою рамою, яка включає систему обробки інформації, яка містить дві струнні пружні розтяжки, закріплені одними своїми кінцями на рухомому вузлі закріплення, другими - на бокових вузлах закріплення, а кожна струнна пружна розтяжка знаходиться у полі постійного магніту, а центральний вузол закріплення з’єднаний з рухомою рамою за допомогою пружних елементів, розташованих симетрично відносно повздовжньої осі рами, бокові вузли закріплення струнних пружних розтяжок з’єднані з корпусом, дозволяє досягти наступного позитивного результату: 1. Підвищення точності виміру лінійних переміщень. 2. Збільшення діапазону переміщень, які вимірюються. 3. Зниження чутливості та реакції пристрою на зовнішні збурюючі фактори. 4. Отримання можливості з’єднання датчика лінійних переміщень з цифровим електроннообчислювальним пристроєм та автоматизації процесу вимірювання лінійних переміщень об’єкту. Використання датчика лінійних переміщень, який пропонується, в процесі вимірювання переміщень об’єктів забезпечить високу точність та дозволить автоматизувати процес шляхом використання обчислювальних засобів. 9 Комп’ютерна в ерстка Д. Шев ерун 37760 Підписне 10 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюIndicator of linear displacements
Автори англійськоюHordin Oleksandr Hryhorovych, Reva Viktoria Valeriivna
Назва патенту російськоюДатчик линейных перемещений
Автори російськоюГордин Александр Григорьевич, Рева Виктория Валериевна
МПК / Мітки
МПК: G01B 21/00
Мітки: переміщень, лінійних, датчик
Код посилання
<a href="https://ua.patents.su/5-37760-datchik-linijjnikh-peremishhen.html" target="_blank" rel="follow" title="База патентів України">Датчик лінійних переміщень</a>
Датчик лінійних переміщень
Номер патенту: 26943
Опубліковано: 10.10.2007
Автори: Скічко Юлія Іванівна, Гордін Олександр Григорович
МПК: G01B 21/00
Мітки: переміщень, датчик, лінійних
Формула / Реферат:
1. Датчик лінійних переміщень, що містить корпус та шток, який відрізняється тим, що до його складу введено об'ємну призму, ходовий ролик, вісь якого зв'язана з пружним елементом, який зв'язаний з рухомою рамою, що з'єднана з корпусом за допомогою пружного елементу, у рухомій рамі розташований струнний перетворювач інформації, який містить дві струнні пружні розтяжки, закріплені одними своїми кінцями на рухомому вузлі закріплення, другими -...
Датчик кутових переміщень
Номер патенту: 28737
Опубліковано: 25.12.2007
Автори: Тимченко Марина Юріївна, Гордін Олександр Григорович
МПК: G01B 7/30
Мітки: кутових, переміщень, датчик
Формула / Реферат:
1 Датчик кутових переміщень, що містить корпус та рухомий елемент, який відрізняється тим, що в його склад введено кругову призму, зв'язану з рухомим елементом, ходовий ролик, вісь якого за допомогою штока зв'язана з першим пружним елементом і який зв'язаний з рухомою рамою, що з'єднана з корпусом за допомогою другого пружного елемента, розміщений у рухомій рамі струнний перетворювач інформації, який містить дві струнні пружні розтяжки,...
Датчик кутових переміщень
Номер патенту: 37455
Опубліковано: 25.11.2008
Автори: Гордін Олександр Григорович, Савостьянова Анна Олегівна
МПК: G01B 7/30
Мітки: кутових, датчик, переміщень
Формула / Реферат:
Датчик кутових переміщень, що містить корпус, кругову напрямну призму, рухому каретку, рухому раму, струнний перетворювач інформації та систему обробки інформації, який відрізняється тим, що кругова напрямна призма є нерухомою, виконана ще одна рухома каретка, розташована під кутом 90 ° відносно першої, кожна з рухомих кареток складається з першого гідроциліндра, всередині якого знаходиться поршень, з'єднаний за допомогою пружини з ходовим...
Диференціальний індуктивний вимірювач циклічних лінійних переміщень
Номер патенту: 79143
Опубліковано: 25.05.2007
Автори: Філіппов Анатолій Захарович, Герасимчук Юрій Анатолійович, Топчій Сергій Іванович, Мягков Валерій Іванович
Мітки: індуктивний, циклічних, вимірювач, диференціальний, переміщень, лінійних
Формула / Реферат:
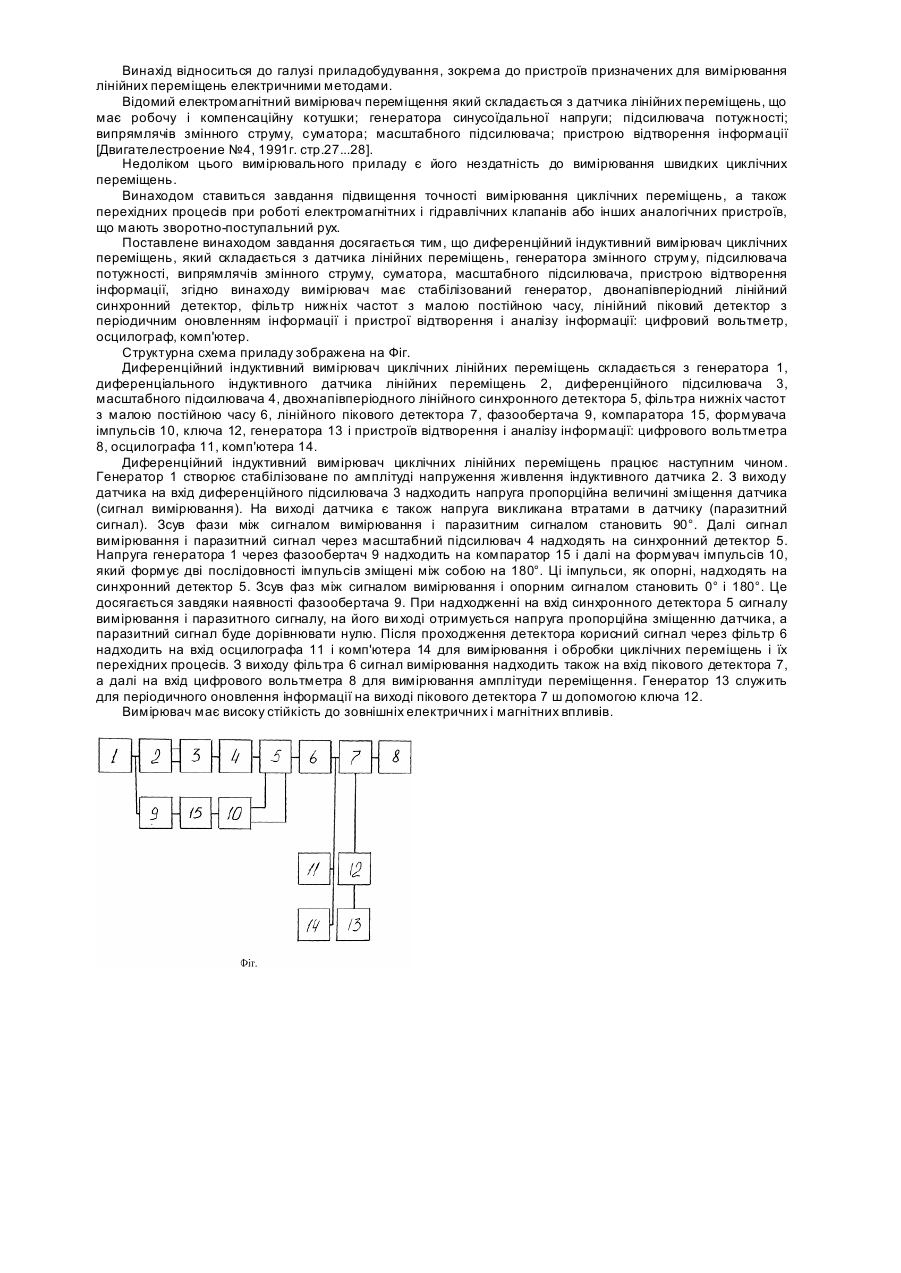
Диференціальний індуктивний вимірювач циклічних лінійних переміщень, який відрізняється тим, що містить послідовно з’єднані стабілізований генератор, диференціальний індуктивний датчик лінійних переміщень, диференціальний підсилювач, масштабний підсилювач, двонапівперіодний лінійний синхронний детектор, фільтр нижніх частот з малою постійною часу, лінійний піковий детектор і цифровий вольтметр, при цьому до генератора підключені послідовно...
Пристрій для вимірювання лінійних переміщень

Номер патенту: 16116
Опубліковано: 17.07.2006
Автори: Постнов Генадій Михайлович, Червоний Віталій Миколайович, Дуб Володимир Васильович, Чеканов Микола Анатолійович
МПК: G01B 9/00
Мітки: лінійних, пристрій, вимірювання, переміщень
Формула / Реферат:
Пристрій для вимірювання лінійних переміщень, що містить станину, прямокутну форму у вигляді паралелограма, дві рифлені плексигласові пластини, між якими закладається дослідний зразок, верхня пластина з одного боку навантажується за допомогою "вантажу", який відрізняється тим, що з іншого боку верхньої пластини приєднаний за допомогою гнучкої в'язки датчик лінійних переміщень, який з'єднано з аналого-цифровим перетворювачем.
Попередній патент: Багатоканальна система контролю стану об’єкта
Наступний патент: Епоксидний клей холодного затвердіння
Випадковий патент: Газліфтний барботажний апарат