Спосіб вимірювання дальності до повітряної цілі у пасивному режимі
Номер патенту: 39516
Опубліковано: 25.02.2009
Автори: Комаров Володимир Олександрович, Лапицький Сергій Володимирович, Василенко Олександр Васильович, Мякухін Віталій Григорович, Расстригін Олександр Олексійович, Капась Андрій Григорович, Гамалій Наталія Вікторівна, Богучарський В''ячеслав Вікторович, Носик Володимир Антонович, Клименко Олена Андріївна, Белема Валентин Опанасович, Головін Олексій Олександрович
Формула / Реферат
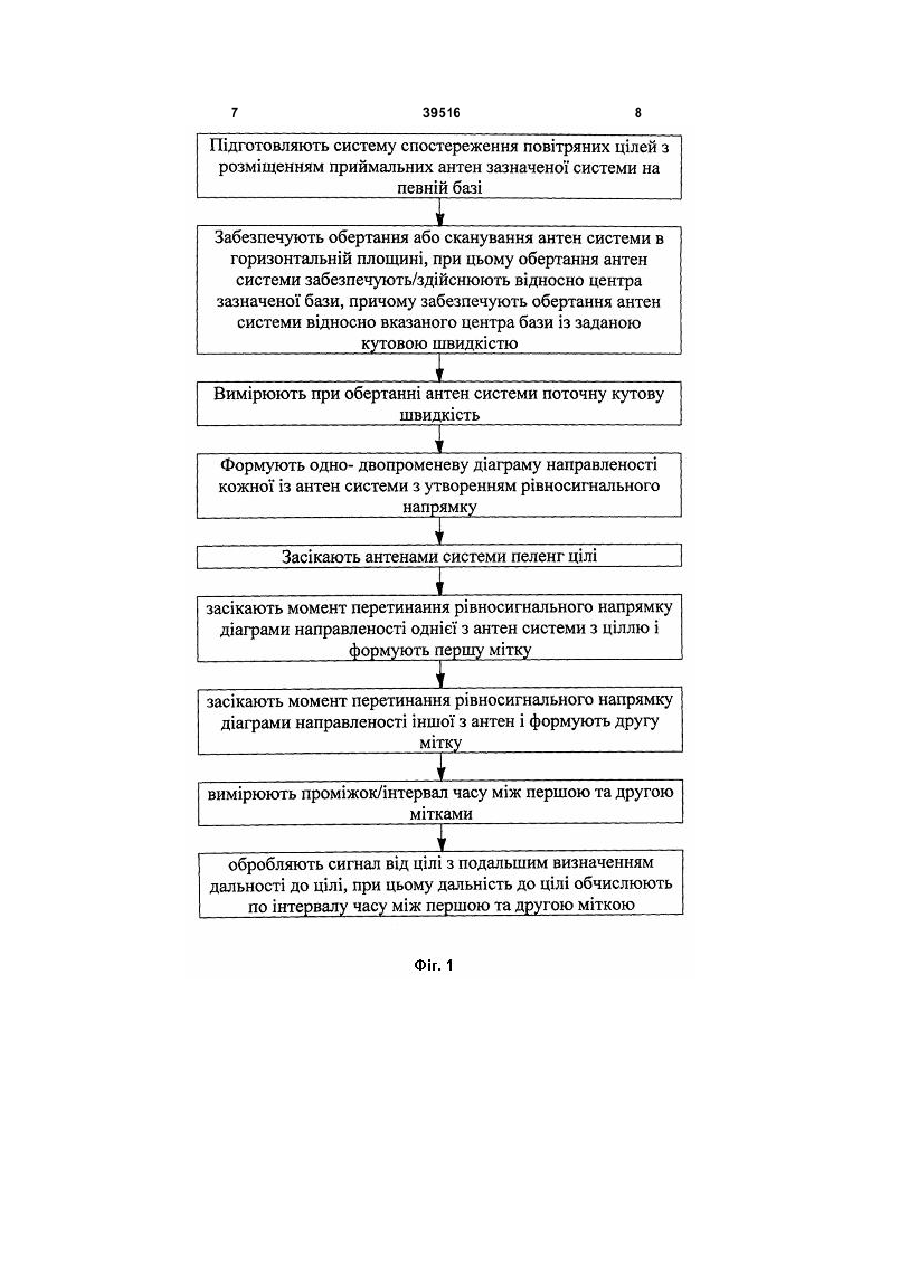
Спосіб вимірювання дальності до повітряної цілі у пасивному режимі, при якому підготовляють систему спостереження повітряних цілей з розміщенням приймальних антен зазначеної системи на певній базі, забезпечують обертання або сканування антен системи в горизонтальній площині, формують одно-двопроменеву діаграму направленості кожної із антен системи з утворенням рівносигнального напрямку, засікають антенами системи пеленг цілі, обробляють сигнал від цілі з подальшим визначенням дальності до цілі, який відрізняється тим, що обертання антен системи забезпечують/здійснюють відносно центра зазначеної бази, забезпечують обертання антен системи відносно вказаного центра бази із заданою кутовою швидкістю, вимірюють при обертанні антен системи поточну кутову швидкість, засікають момент перетинання рівносигнального напрямку діаграми направленості однієї з антен системи з ціллю і формують першу мітку, засікають момент перетинання рівносигнального напрямку діаграми направленості іншої з антен і формують другу мітку, вимірюють проміжок/інтервал часу між першою та другою мітками, а дальність до цілі обчислюють по інтервалу часу між першою та другою мітками.
Текст
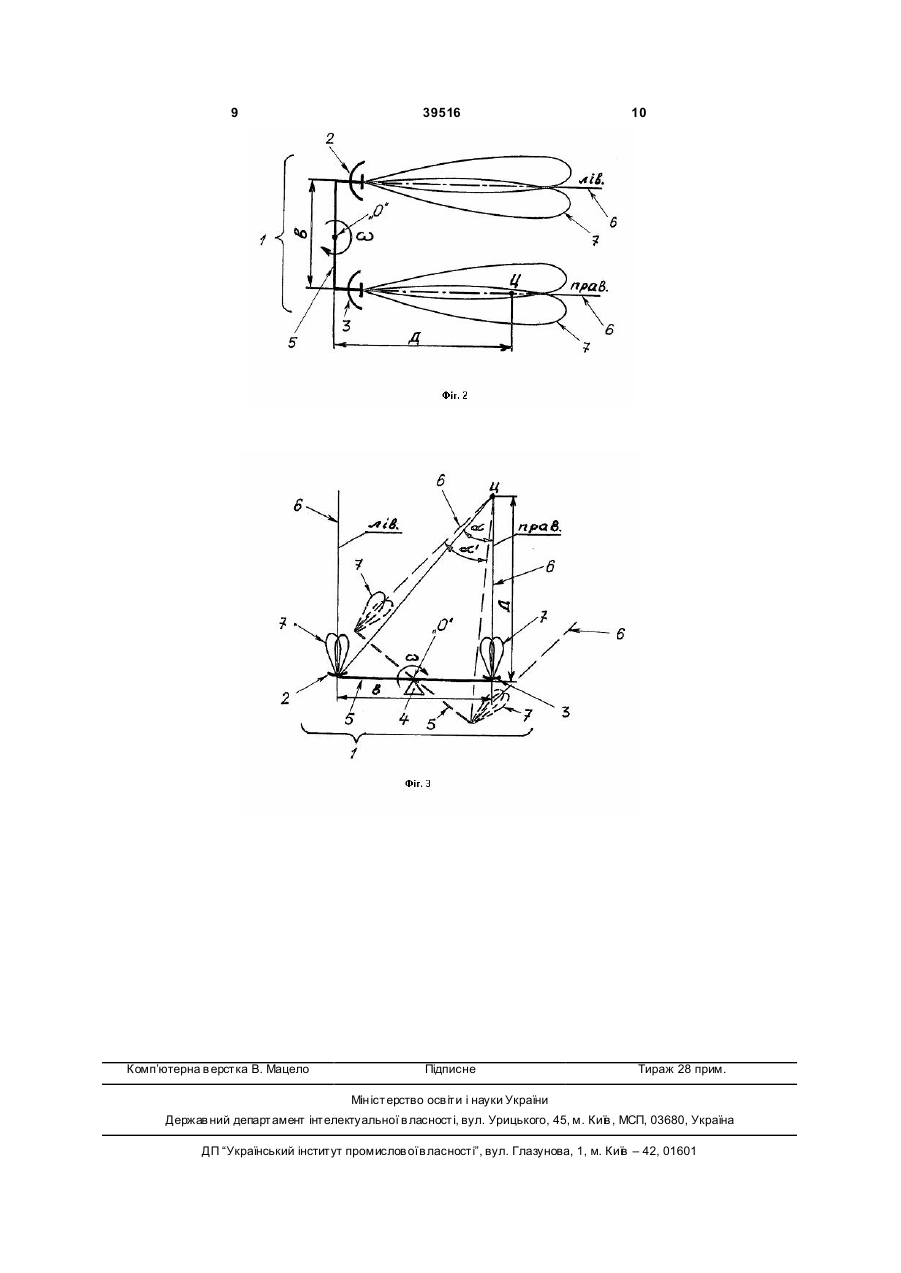
Спосіб вимірювання дальності до повітряної цілі у пасивному режимі, при якому підготовляють систему спостереження повітряних цілей з розмі U 1 3 39516 4 з утворенням рівносигнального напрямку, засікаповітряних цілей з розміщенням приймальних анють антенами системи пеленг цілі, обробляють тен зазначеної системи на певній базі, забезпечусигнал від цілі з подальшим визначенням дальноють обертання або сканування антен системи в сті до цілі [1]. горизонтальній площині, формують одно- двопроДо недоліків відомого способу вимірювання меневу діаграму направленості кожної із антен дальності до повітряної цілі відноситься те, що системи з утворенням рівно сигнального напрямку, його неможливо реалізувати в наземних засобах засікають антенами системи пеленг цілі, оброблярадіоелектронної розвідки, оскільки заздалегідь ють сигнал від цілі з подальшим визначенням даневідомі швидкість і напрямок польоту повітряної льності до цілі, полягає в тому, що обертання анцілі (здійснення способу можливе лише при лінійтен системи забезпечують/здійснюють відносно ному переміщенні зазначеного об'єкта (цілі) з віцентра зазначеної бази, забезпечують обертання домою швидкістю відносно приймального пункту). антен системи відносно вказаного центра бази із До недоліків відомого способу відноситься й те, заданою кутовою швидкістю, вимірюють при оберщо використовується система, що складається з танні антен системи поточну кутову швидкість, двох рознесених у просторі на велику дальність засікають момент перетинання рівносигнального (що обумовлюється тисячами метрів) приймачів напрямку діаграми направленості однієї з антен (приймальних антен), а для пошуку цілі потрібна системи з ціллю і формують першу мітку, засікасинхронізація з великою точністю кругової швидють момент перетинання рівносигнального напрякості обертання зазначених приймальних антен, а мку діаграму направленості іншої з антен і фордальність до цілі вимірюється за пеленгами двох мують другу мітку, вимірюють проміжок/інтервал точок. До того ж система є стаціонарною. часу між першою та другою мітками, а дальність Найбільш близьким технічним рішенням, як по до цілі обчислюють по інтервалу часу між першою суті, так і по задачах, що вирішуються, яке обране та другою міткою. за найближчий аналог (прототип), є спосіб виміПорівняльний аналіз технічного рішення з прорювання дальності до повітряної цілі у пасивному тотипом дозволяє зробити висновок, що спосіб режимі, при якому підготовляють систему спостевимірювання дальності до повітряної цілі у пасивреження повітряних цілей з розміщенням прийманому режимі, який заявляється, відрізняється тим, льних антен зазначеної системи на певній базі, що обертання антен системи забезпечузабезпечують обертання або сканування антен ють/здійснюють відносно центра зазначеної бази, системи в горизонтальній площині, формують одзабезпечують обертання антен системи відносно но- двопроменеву діаграму направленості кожної вказаного центра бази із заданою кутовою швидкііз антен системи з утворенням рівносигнального стю, вимірюють при обертанні антен системи понапрямку, засікають антенами системи пеленг цілі, точну кутову швидкість, засікають момент перетиобробляють сигнал від цілі з подальшим визнанання рівносигнального напрямку діаграму ченням дальності до цілі [2]. направленості однієї з антен системи з ціллю і До недоліків відомого способу вимірювання формують першу мітку, засікають момент перетидальності до повітряної цілі у пасивному режимі, нання рівносигнального напрямку діаграму напраякий обрано за найближчий аналог (прототип), вленості іншої з антен і формують другу мітку, вивідноситься те, що при існуючому конструктивному мірюють проміжок/інтервал часу між першою та виконанні системи, що складається з двох рознедругою мітками, а дальність до цілі обчислюють по сених у просторі на велику дальність (що обумовінтервалу часу між першою та другою міткою. люється тисячами метрів) приймачів (приймальТаким чином, спосіб вимірювання дальності до них антен), неможливо реалізувати в наземних повітряної цілі у пасивному режимі, який заявлязасобах радіоелектронної розвідки, оскільки зається, відповідає критерію корисної моделі «новиздалегідь невідомі швидкість і напрямок польоту зна». повітряної цілі (здійснення способу можливе лише Суть способу вимірювання дальності до повітпри лінійному переміщенні зазначеного об'єкта ряної цілі у пасивному режимі пояснюється за до(цілі) з відомою швидкістю відносно приймального помогою ілюстрацій, де на Фіг.1 показана блокпункту). До недоліків відомого способу відноситься схема поетапного виконання процесу, який являє й те, що використовується система, в якій потрібна собою суть способу вимірювання дальності до синхронізація з великою точністю кругової швидповітряної цілі у пасивному режимі, який заявлякості обертання зазначених приймальних антен, а ється, на Фіг.2 показана схема розміщення двох дальність до цілі вимірюється за пеленгами двох антен на певній базі, що обертається відносно точок. До недоліків відомого способу відноситься центра зазначеної бази із заданою кутовою швидтакож й те, що система є стаціонарною. кістю, за допомогою яких реалізується зазначений В основу способу покладено завдання шляхом спосіб, на Фіг.3 показана схема визначення дальрозміщення двох антен на певній базі, що обертаності до цілі базово-часовим методом, який поклаються відносно центра зазначеної бази із заданою дено в основу способу вимірювання дальності до кутовою швидкістю, забезпечити підвищення мобіповітряної цілі у пасивному режимі, який заявляльності системи, оперативності та точності виміється. рювання дальності до повітряної цілі у пасивному Спосіб вимірювання дальності до повітряної режимі з однієї точки розміщення системи, а також цілі у пасивному режимі, який заявляється, здійсзменшити апаратурні витрати. нюється таким чином (див. блок-схему на Фіг.1). Суть корисної моделі в способі вимірювання Для здійснення способу вимірювання дальнодальності до повітряної цілі у пасивному режимі, сті до повітряної цілі у пасивному режимі, який при якому підготовляють систему спостереження заявляється, попередньо підготовляють систему 5 39516 6 спостереження повітряних цілей з розміщенням нювання іонізованої області атмосфери, що приймальних антен зазначеної системи на певній створюється рухом повітряного об'єкта. базі. Далі засікають момент перетинання рівносигДля здійснення способу вимірювання дальнонального напрямку (позиція 6) діаграми направлесті до повітряної цілі у пасивному режимі, який ності (позиція 7) однієї з антен (наприклад, лівої заявляється, застосовують (як варіант конструктиантени (позиція 2) - див. схему на Фіг.2) системи вного виконання) систему (позиція 1) спостере(позиція 1) з ціллю («Ц») і формують першу мітку. ження повітряних цілей (позиція «Ц»). Система Потім засікають момент перетинання рівноси(позиція 1), як варіант конструктивного виконання, гнального напрямку (позиція 6) діаграми направмістить дві приймальні антени (відповідно, позиції леності іншої з антен (відповідно, правої (позиція 2 і 3), що розміщені на приймальному пункті (пози3) - див. схему на Фіг.3) і формують другу мітку. ція 4). При цьому зазначені антени (ліва та права, Після цього вимірюють проміжок/інтервал часу відповідно, позиції 2 і 3) розміщують на загальній між першою та другою мітками. платформі (позиція 5) з рознесенням їх (відносно На завершальній стадії обробляють сигнал від цілі («Ц») з подальшим визначенням дальності точки «О» обертання w платформи (позиція 5) («Д») до цілі («Ц»), при цьому дальність («Д») до див. схему на Фіг.2) на величину бази «b». цілі («Ц») обчислюють по інтервалу часу між перДалі забезпечують обертання w (або сканушою та др угою міткою. вання) антен (позиції 2 і 3) системи (позиція 1) в Математично зазначене вище записується тагоризонтальній площині, при цьому обертання ким чином (згідно зі схемою на Фіг.3): антен (позиції 2 і 3) системи (позиції 1) забезпечуb=const; Д=const; кут a'=a; a=wt [рад]; tga=b/Д. ють/здійснюють відносно центра (точка «О») зазначеної бази «b», причому забезпечують оберТоді Д=b/tga=b/tg wt Крім того, для таких умов значення кута а буде тання w антен (позиції 2 і 3) системи (позиція 1) відносно вказаного центра (точка «О») бази «b» із надзвичайно малим, тому tga»a=wt і тоді остаточна формула для обчислення дальності «Д» призаданою кутовою швидкістю (позиція w - див. схеймає остаточний вигляд ми на Фіг.2-3). Після цього вимірюють при обертанні антен Д=b/wt (позиції 2 і 3) системи (позиції 1) поточну кутову На цьому процес вимірювання дальності до швидкість. повітряної цілі у пасивному режимі закінчується. Продовжують процес тим, що формують одноПідвищення ефективності способу вимірювандвопроменеву діаграму направленості кожної із ня дальності до повітряної цілі у пасивному режиантен (позиції 2 і 3) системи (позиція 1) з утворенмі, у порівнянні з прототипом, полягає в тому, що ням рівносигнального напрямку (позиція 6) (див. шляхом розміщення двох антен на певній базі, що схеми на Фіг.2-3). При цьому рівносигнальні наобертаються відносно центра зазначеної бази із прямки (позиція 6) паралельні і також рознесені в заданою кутовою швидкістю, забезпечується підазимутальній площині на базу «b» (див. схему на вищення мобільності системи, оперативності та Фіг.2). точності вимірювання дальності до повітряної цілі Оскільки база «b» дорівнює одиницям метрів у пасивному режимі з однієї точки розміщення сис(при розташуванні платформи (позиція 5) на притеми. Підвищення ефективності способу вимірюймальному пункті (позиція 4), наприклад, на даху вання дальності до повітряної цілі у пасивному кузова вантажного автомобіля, а дальність («Д») режимі, у порівнянні з прототипом, полягає в тому, до цілі («Ц») - десятками кілометрів, то час t буде що шляхом об'єднання нерухомих систем в одн у, у складати долі мілісекунд. Тому як кутові, так і раякій швидкість кутового обертання приймальних діальні переміщення джерела радіовипромінювань антен однакова (і не потребує синхронізації) забудуть настільки незначними, що ними можна знебезпечується зменшення апаратурних витрат. хтувати і вважати, що джерело нерухоме. Джерела інформації: По закінченню зазначеної операції засікають 1. Николаев А.Г., Перцов С.В. Радиолокация антенами (позиції 2 і 3) системи (позиція 1) пеленг (пассивная радиолокация). Под ред. А.А. Красовсцілі (позиція «Ц») (див. схеми на Фіг.2-3). Джерекого. - М., Советское радио, 1964, 334 с. - аналог. лом радіовипромінювання (позиція «Ц») можуть 2. Караваев В.В., Сазонов В.В. «Статистичесбути природне радіотеплове випромінювання повікая теория пассивной локации». - М., Радио и тряного об'єкта, випромінювання бортових радіосвязь, 1987, 240с. - прототип. електронних засобів повітряного об'єкта, випромі 7 39516 8 9 Комп’ютерна в ерстка В. Мацело 39516 Підписне 10 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measurement of range to air target in passive mode
Автори англійськоюBelema Valentyn Opanasovych, Bohucharskyi Viacheslav Viktorovych, Vasylenko Oleksandr Vasyliovych, Hamalii Natalia Viktorivna, Holovin Oleksii Oleksandrovych, Kapas Andrii Hryhorovych, Klymenko Olena Andriivna, Komarov Volodymyr Oleksandrovych, Lapytskyi Serhii Volodymyrovych, Miakukhin Vitalii Hryhorovych, Nosyk Volodymyr Antonovych, Rasstryhin Oleksandr Oleksiiovych
Назва патенту російськоюСпособ измерения дальности до воздушной цели в пассивном режиме
Автори російськоюБелема Валентин Афанасьевич, Богучарский Вячеслав Викторович, Василенко Александр Васильевич, Гамалий Наталья Викторовна, Головин Алексей Александрович, Капась Андрей Григорьевич, Клименко Елена Андреевна, Комаров Владимир Александрович, Лапицкий Сергей Владимирович, Мякухин Виталий Григорьевич, Носик Владимир Антонович, Расстригин Александр Алексеевич
МПК / Мітки
МПК: G01S 13/00
Мітки: пасивному, спосіб, вимірювання, дальності, режимі, повітряної, цілі
Код посилання
<a href="https://ua.patents.su/5-39516-sposib-vimiryuvannya-dalnosti-do-povitryano-cili-u-pasivnomu-rezhimi.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання дальності до повітряної цілі у пасивному режимі</a>
Спосіб вимірювання мінімальної дальності до цілі в імпульсній рлс
Номер патенту: 25868
Опубліковано: 27.08.2007
Автори: Бортнік Володимир Іванович, Антюхов Юрій Митрофанович, Добруля Віктор Іванович
МПК: G01S 13/08
Мітки: рлс, цілі, імпульсний, спосіб, вимірювання, дальності, мінімальної
Формула / Реферат:
Спосіб вимірювання мінімальної дальності до цілі в імпульсній РЛС, заснований на випромінюванні імпульсного сигналу в напрямку цілі, прийнятті відбитого сигналу, вимірі часу надходження відбитого сигналу і перетворенні часу запізнювання в дальність, який відрізняється тим, що випромінюваний імпульсний сигнал формують у вигляді послідовності n кодових посилок, остання з яких відрізняється від усіх попередніх, визначають час надходження...
Спосіб виявлення повітряної цілі та вимірювання її координат
Номер патенту: 17672
Опубліковано: 16.07.2001
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: повітряної, спосіб, вимірювання, виявлення, цілі, координат
Формула / Реферат:
Способ обнаружения воздушной цели и измерения ее координат, заключающийся в излучении зондирующего сигнала в виде радиоимпульсов на несущей частоте микроволнового диапазона с помощью передатчика и приемо-передающей антенны наземного двухкоординатного радиолокатора, приеме эхо-сигналов воздушной цели и измерении дальности и азимута цели, отличающийся тем, что измеряют угол места θ бортового источника радиоизлучения цеди с помощью...
Спосіб вимірювання дальності
Номер патенту: 40335
Опубліковано: 16.07.2001
Автори: Обод Іван Іванович, Вінник Анатолій Тихонович, Полюга Валентин Петрович
МПК: G01C 21/00
Мітки: дальності, вимірювання, спосіб
Формула / Реферат:
Спосіб вимірювання дальності, який полягає в тому, що запитником випромінюють кодовий сигнал запиту дальності на несучій частоті f1, який приймають відповідачем, декодують, випромінюють кодовий сигнал відповіді дальності на несучій частоті f2, який приймають та декодують запитником, і по часу запізнювання між випромінюваним та прийнятим кодовим сигналами дальності вимірюють дальність, який відрізняється тим, що із прийнятих сигналів...
Спосіб вимірювання дальності
Номер патенту: 45900
Опубліковано: 15.04.2002
Автори: Обод Іван Іванович, Силич Валерій Прокопович, Полюга Валентин Петрович
МПК: G01S 13/08
Мітки: спосіб, вимірювання, дальності
Формула / Реферат:
Спосіб вимірювання дальності, який полягає в тому, що запитником випромінюють кодовий сигнал запиту дальності на несівній частоті f1, який приймають відповідачем, випромінюють кодовий сигнал відповіді дальності на несівній частоті f2, який приймають та декодують запитником і за часом запізнювання між випромінюваним та прийнятим кодовим сигналами дальності вимірюють дальність, який відрізняється тим, що оцінюють амплітуду кожного імпульсу коду...
Спосіб вимірювання дальності
Номер патенту: 50659
Опубліковано: 15.10.2002
Автори: Обод Іван Іванович, Полюга Валентин Петрович, Силич Валерій Прокопович
МПК: G01C 21/20, G01S 11/00, G01C 22/00
Мітки: спосіб, вимірювання, дальності
Формула / Реферат:
Спосіб вимірювання дальності, який полягає в тому, що бортовим запитувачем випромінюють кодовий сигнал запиту дальності на несучій частоті f1, який приймають наземним відповідачем, випромінюють кодовий сигнал відповіді дальності на несучій частоті f2, який приймають та декодують бортовим запитувачем і по часу запізнення між випроміненим та прийнятим кодовим сигналами дальності вимірюють дальність, який відрізняється тим, що наземним...
Попередній патент: Суміш для приготування полістиролбетону
Наступний патент: Спосіб індивідуалізації оздоровчих фізичних навантажень для чоловіків працездатного віку
Випадковий патент: Пристрій виділення контуру на основі низькочастотної фільтрації