Спосіб визначення положення точок на земній поверхні
Формула / Реферат
Cпociб визначення положення точок на земній поверхні, який заключається у тому, що проводять польове рекогносцирування місцевості, позначають на місцевості точки геодезичної мережі, обчислюють кількість сесій вимірів, розташовують одночасно не менше трьох систем GPS послідовно у визначених точках геодезичної мережі, проводять виміри i визначають положення точок на земній поверхні, який відрізняється тим, що після позначення на місцевості точок геодезичної мережі встановлюють у кожній з них одну систему GPS, визначають нею приблизні координати точок мережі, розраховують попередньо точність положення точок, визначають інформативність кожного з векторів вимірів, а також оптимальну схему вимірів максимальної інформативності, формують ceciї вимірів i визначають оптимально необхідні ceciї вимірів.
Текст
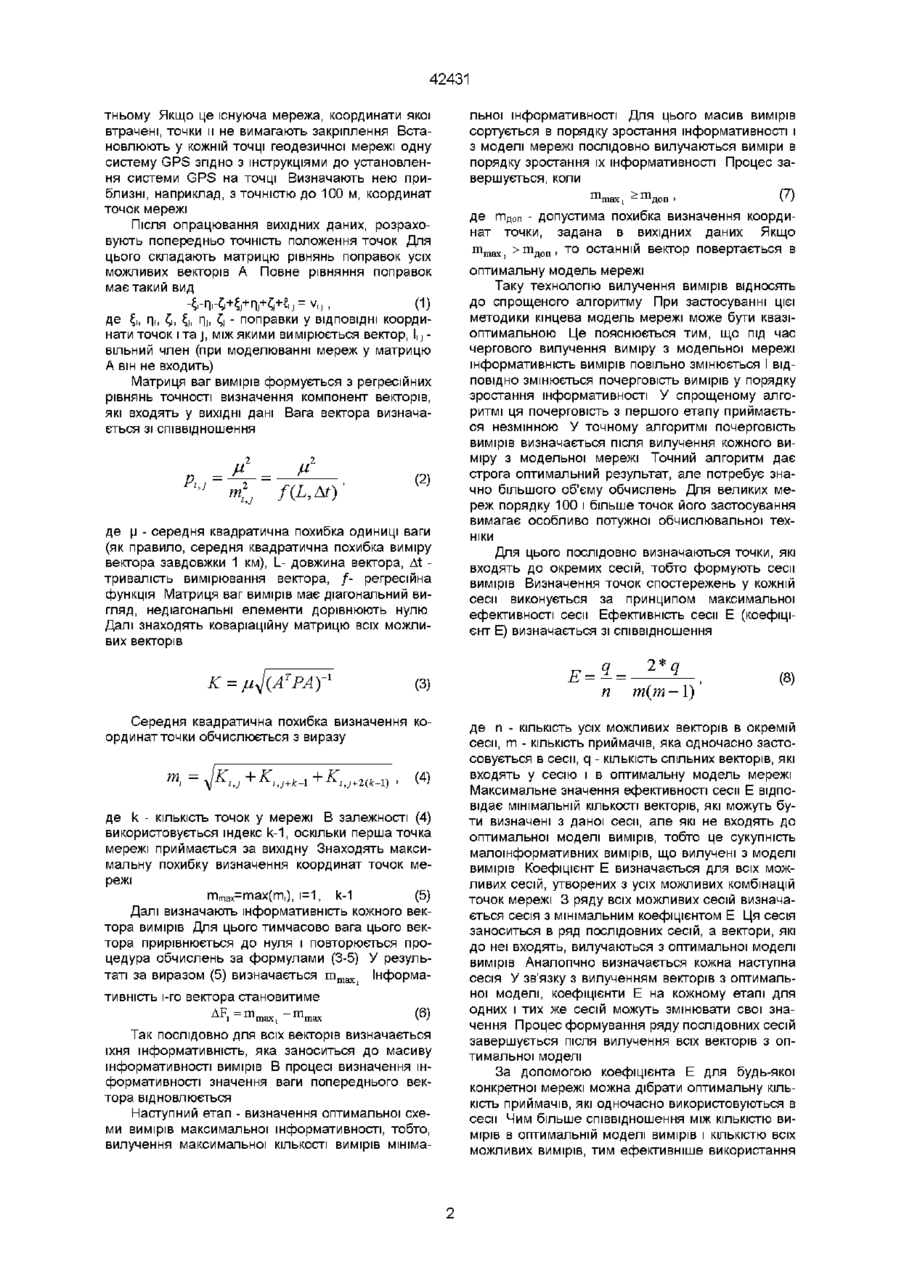
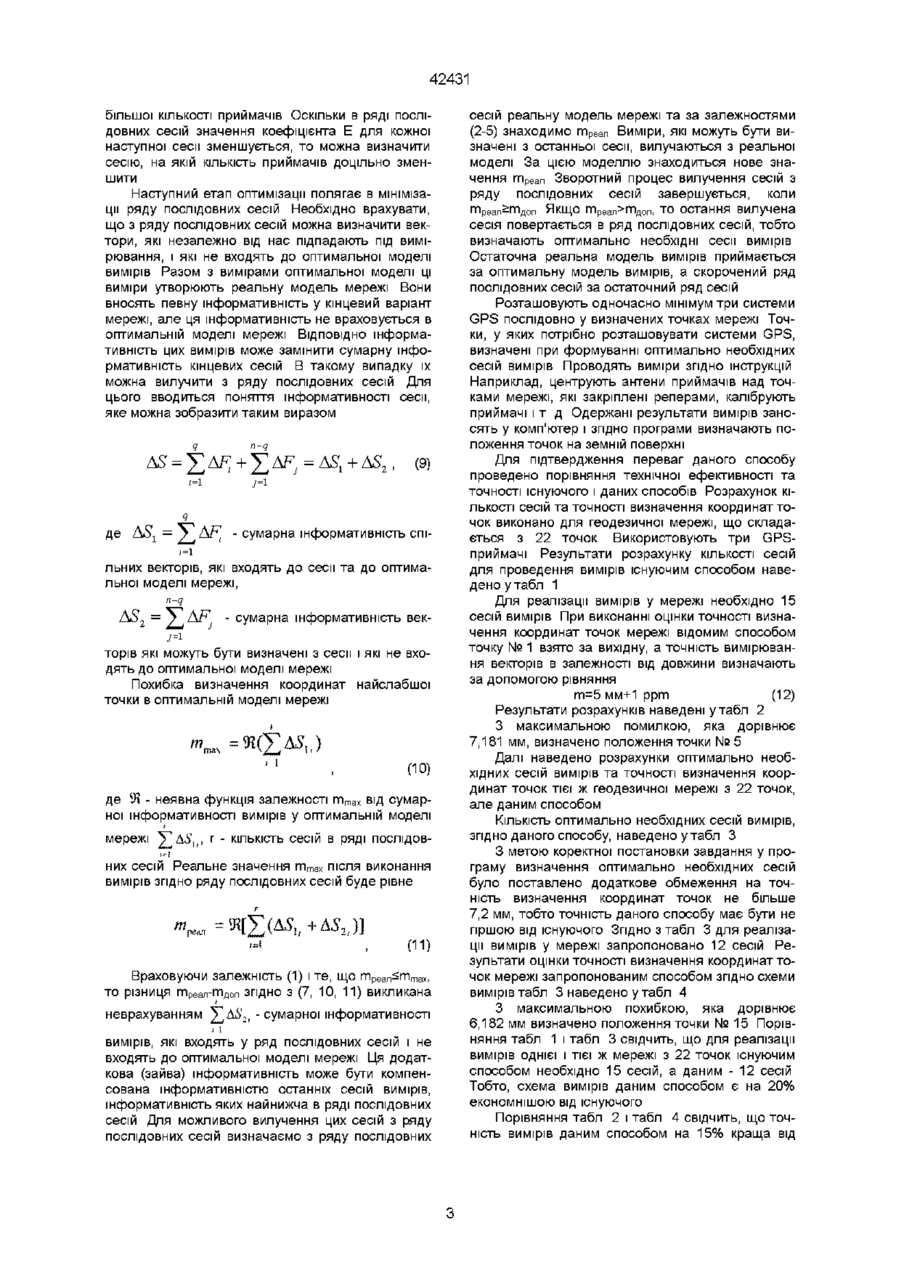
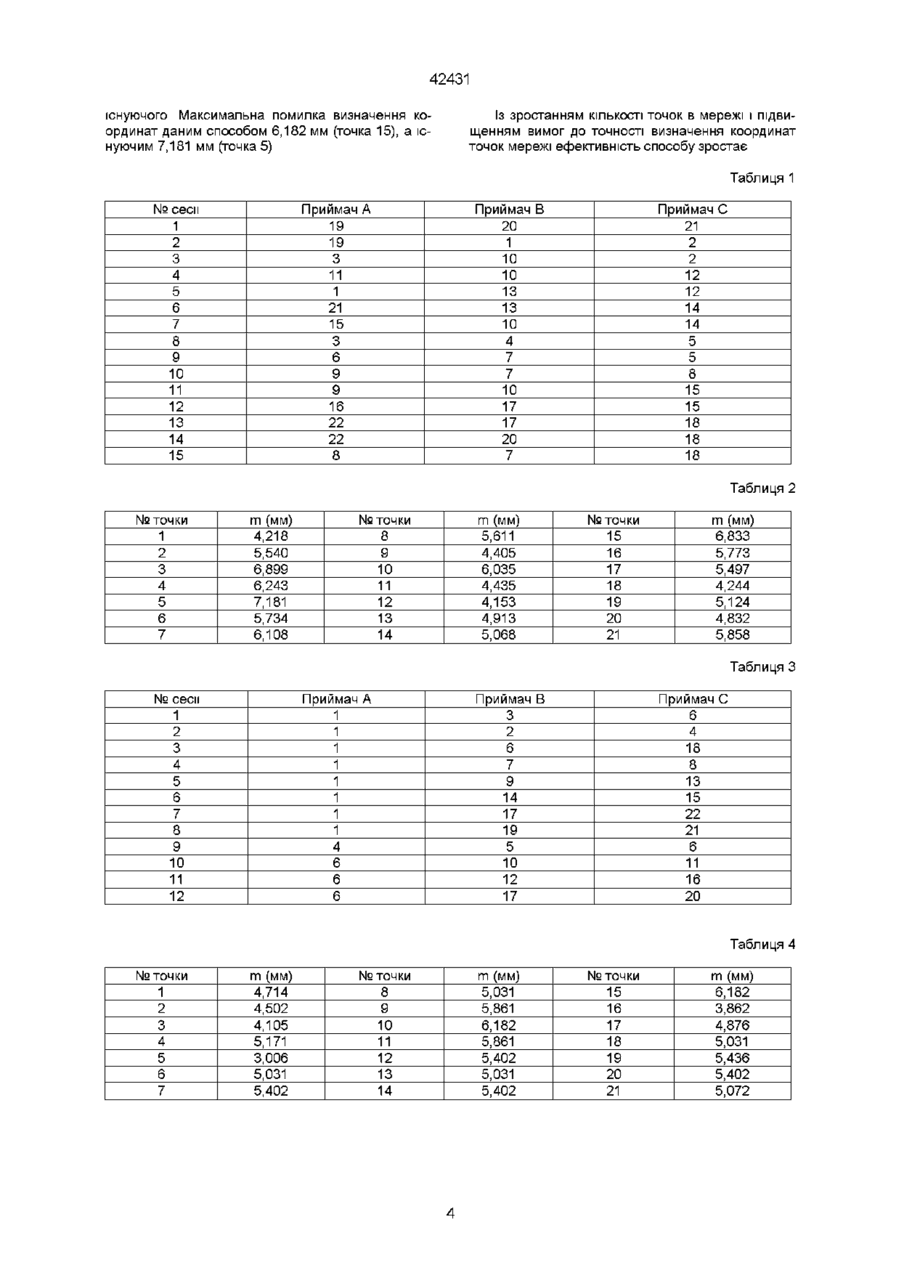
Спосіб визначення положення точок на земній поверхні, який заключаешься утому, що проводять польове рекогносцирування місцевості, позначають на місцевості точки геодезичної мережі, обчислюють КІЛЬКІСТЬ сесій вимірів, розташовують од ночасно не менше трьох систем GPS послідовно у визначених точках геодезичної мережі, проводять виміри і визначають положення точок на земній поверхні, який відрізняється тим, що після позначення на місцевості точок геодезичної мережі встановлюють у кожній з них одну систему GPS, визначають нею приблизні координати точок мережі, розраховують попередньо точність положення точок, визначають інформативність кожного з векторів вимірів, а також оптимальну схему вимірів максимальної інформативності, формують сесії вимірів і визначають оптимально необхідні сесії вимірів Винахід відноситься до геодезичних вимірів, а, конкретно, до способів визначення положення точок на земній поверхні Відомий спосіб визначення положення точок на земній поверхні заключається у тому, що проводять польове рекогносцирування місцевості, позначають на місцевості точки геодезичної мережі, обчислюють КІЛЬКІСТЬ сесій вимірів, розташовують одночасно не менше трьох систем GPS послідовно у визначених точках геодезичної мережі, проводять виміри і визначають положення точок на земній поверхні (Б Гофманн-Велленгоф, Г Ліхтенеггер, Д Коллінз Глобальна система визначення місцеположення (GPS) - К Наукова думка, 1996 -С 171-196) Але відсутність оптимізацм вимірів у згаданому способі обумовлює надмірну КІЛЬКІСТЬ сесій вимірів, внаслідок чого спосіб не дозволяє досягти максимальної точності визначення положення точок земної поверхні Надмірна КІЛЬКІСТЬ сесій вимірів побільшує час проведення вимірів В основу винаходу поставлене завдання вдосконалити спосіб визначення положення точок на земній поверхні, в якому визначення інформативності кожного з векторів вимірів і формування оптимально необхідної сесії вимірів, дає можливість оптимізувати схему вимірів, що дозволило б підвищити точність визначення положення точок і скоротити час вимірів Поставлене завдання вирішують тим, що у способі визначення положення точок на земній поверхні, який заключається у тому, що проводять польове рекогносціювання місцевості, позначають на місцевості точки геодезичної мережі, обчислюють КІЛЬКІСТЬ секцій вимірів, розташовують одночасно не менше трьох систем GPS послідовно у визначених точках геодезичної мережі, проводять виміри і визначають положення точок на земній поверхні, згідно з винаходом, після позначення на місцевості точок геодезичної мережі встановлюють у кожній з них одну систему GPS, визначають приблизні координати точок мережі, розраховують попередньо точність положення точок, визначають інформативність кожного з векторів вимірів, а також оптимальну схему вимірів максимальної інформативності, формують сесії вимірів і визначають оптимально необхідні сесії вимірів Визначення інформативності кожного з векторів вимірів, а також оптимальної схеми вимірів максимальної інформативності дає можливість сформувати оптимально необхідні сесії вимірів, що дозволяє зменшити час і витрати коштів на проведення вимірів, а також підвищити їх точність При цьому витрати коштів на проведення вимірів порівняно з відомим способом зменшуються на 10-20%, а точність вимірів підвищується на 5-10% Спосіб визначення положення точок на земній поверхні здійснюють таким чином Проводять польове рекогносціювання місцевості Для цього виїжджають на місце майбутньої мережі Якщо це новостворювана мережа, намічають місця розташування и точок, причому видимість між точками має бути більшою від 20° для безперешкодного поля зору Вибрані точки мережі позначають спеціальними реперами Положення точок наносять на карти з метою легкого знаходження їх у майбу СО 42431 тньому Якщо це існуюча мережа, координати якої втрачені, точки и не вимагають закріплення Встановлюють у кожній точці геодезичної мережі одну систему GPS згідно з інструкціями до установлення системи GPS на точці Визначають нею приблизні, наприклад, з точністю до 100 м, координат точок мережі Після опрацювання вихідних даних, розраховують попередньо точність положення точок Для цього складають матрицю рівнянь поправок усіх можливих векторів А Повне рівняння поправок має такий вид -^-ПгСіЧ+nj+Cj+Eu^v,,, (1) де %и Пі, С. %\, 1j. Cj - поправки у ВІДПОВІДНІ координати точок і та j , між якими вимірюється вектор, І,, вільний член (при моделюванні мереж у матрицю А він не входить) Матриця ваг вимірів формується з регресійних рівнянь точності визначення компонент векторів, які входять у ВИХІДНІ дані Вага вектора визначається зі співвідношення m* f(L,At) (2) де \І - середня квадратична похибка одиниці ваги (як правило, середня квадратична похибка виміру вектора завдовжки 1 KM), L- довжина вектора, At тривалість вимірювання вектора, /- регресійна функція Матриця ваг вимірів має діагональний вигляд, недіагональні елементи дорівнюють нулю Далі знаходять коваріаційну матрицю всіх можливих векторів (3) Середня квадратична похибка визначення координат точки обчислюється з виразу m, = (4) де k - КІЛЬКІСТЬ точок у мережі В залежності (4) використовується індекс к-1, ОСКІЛЬКИ перша точка мережі приймається за вихідну Знаходять максимальну похибку визначення координат точок мережі mmax^maxfm,), i=1, k-1 (5) Далі визначають інформативність кожного вектора вимірів Для цього тимчасово вага цього вектора прирівнюється до нуля і повторюється процедура обчислень за формулами (3-5) У результаті за виразом (5) визначається m m a x Інформативність і-го вектора становитиме AF^nW.-nW (6) Так послідовно для всіх векторів визначається їхня інформативність, яка заноситься до масиву інформативності вимірів В процесі визначення інформативності значення ваги попереднього вектора відновлюється Наступний етап - визначення оптимальної схеми вимірів максимальної інформативності, тобто, вилучення максимальної КІЛЬКОСТІ вимірів мініма льної інформативності Для цього масив вимірів сортується в порядку зростання інформативності і з моделі мережі послідовно вилучаються виміри в порядку зростання їх інформативності Процес завершується, коли m m a X l ^тдоп. (7) де гпдоп - допустима похибка визначення координат точки, задана в вихідних даних Якщо m >т т о max доп> останній вектор повертається в оптимальну модель мережі Таку технологію вилучення вимірів відносять до спрощеного алгоритму При застосуванні цієї методики кінцева модель мережі може бути квазіоптимальною Це пояснюється тим, що під час чергового вилучення виміру з модельної мережі інформативність вимірів повільно змінюється І ВІДПОВІДНО змінюється почерговість вимірів у порядку зростання інформативності У спрощеному алгоритмі ця почерговість з першого етапу приймається незмінною У точному алгоритмі почерговість вимірів визначається після вилучення кожного виміру з модельної мережі Точний алгоритм дає строга оптимальний результат, але потребує значно більшого об'єму обчислень Для великих мереж порядку 100 і більше точок його застосування вимагає особливо потужної обчислювальної техніки Для цього послідовно визначаються точки, які входять до окремих сесій, тобто формують сесії вимірів Визначення точок спостережень у кожній сесії виконується за принципом максимальної ефективності сесії Ефективність сеем Е (коефіцієнт Е) визначається зі співвідношення n m(m-\) (8) де п - КІЛЬКІСТЬ усіх можливих векторів в окремій сесії, m - КІЛЬКІСТЬ приймачів, яка одночасно застосовується в сесії, q - КІЛЬКІСТЬ спільних векторів, які входять у сесію і в оптимальну модель мережі Максимальне значення ефективності сеем Е відповідає мінімальній КІЛЬКОСТІ векторів, які можуть бути визначені з даної сесії, але які не входять до оптимальної моделі вимірів, тобто це сукупність малоінформативних вимірів, що вилучені з моделі вимірів Коефіцієнт Е визначається для всіх можливих сесій, утворених з усіх можливих комбінацій точок мережі 3 ряду всіх можливих сесій визначається сесія з мінімальним коефіцієнтом Е Ця сесія заноситься в ряд послідовних сесій, а вектори, які до неї входять, вилучаються з оптимальної моделі вимірів Аналогічно визначається кожна наступна сесія У зв'язку з вилученням векторів з оптимальної моделі, коефіцієнти Е на кожному етапі для одних і тих же сесій можуть змінювати свої значення Процес формування ряду послідовних сесій завершується після вилучення всіх векторів з оптимальної моделі За допомогою коефіцієнта Е для будь-якої конкретної мережі можна дібрати оптимальну КІЛЬКІСТЬ приймачів, які одночасно використовуються в сесії Чим більше співвідношення між КІЛЬКІСТЮ вимірів в оптимальній моделі вимірів і КІЛЬКІСТЮ ВСІХ можливих вимірів, тим ефективніше використання 42431 більшої КІЛЬКОСТІ приймачів Оскільки в ряді послідовних сесій значення коефіцієнта Е для кожної наступної сесії зменшується, то можна визначити сесію, на якій КІЛЬКІСТЬ приймачів доцільно зменшити Наступний етап оптимізацм полягає в мінімізації ряду послідовних сесій Необхідно врахувати, що з ряду послідовних сесій можна визначити вектори, які незалежно від нас підпадають під вимірювання, і які не входять до оптимальної моделі вимірів Разом з вимірами оптимальної моделі ці виміри утворюють реальну модель мережі Вони вносять певну інформативність у кінцевий варіант мережі, але ця інформативність не враховується в оптимальній моделі мережі ВІДПОВІДНО інформативність цих вимірів може замінити сумарну інформативність кінцевих сесій В такому випадку їх можна вилучити з ряду послідовних сесій Для цього вводиться поняття інформативності сесії, яке можна зобразити таким виразом (9) де AS1 = /iAFi - сумарна інформативність спі льних векторів, які входять до сесії та до оптимальної моделі мережі, n-q AS2 = /iAFi - сумарна інформативність век торів які можуть бути визначені з сесії і які не входять до оптимальної моделі мережі Похибка визначення координат найслабшої точки в оптимальній моделі мережі (Ю) де SR - неявна функція залежності mmaX від сумарної інформативності вимірів у оптимальній моделі мережі V A 5 ' h , r - КІЛЬКІСТЬ сесій в ряді послідовних сесій Реальне значення mmaX після виконання вимірів згідно ряду послідовних сесій буде рівне (11) ВраХОВуЮЧИ ЗалеЖНІСТЬ (1) І ТЄ, ЩО ГПреал^ГПтах, то різниця гпреал-гпдоп згідно з (7, 10, 11) викликана неврахуванням ^ А б ' 2 г -сумарної інформативності і і вимірів, які входять у ряд послідовних сесій і не входять до оптимальної моделі мережі Ця додаткова (зайва) інформативність може бути компенсована інформативністю останніх сесій вимірів, інформативність яких найнижча в ряді послідовних сесій Для можливого вилучення цих сесій з ряду послідовних сесій визначаємо з ряду послідовних сесій реальну модель мережі та за залежностями (2-5) знаходимо треал Виміри, які можуть бути визначені з останньої сесії, вилучаються з реальної моделі За цією моделлю знаходиться нове значення ГПреал ЗВОРОТНИЙ ПрОЦЄС ВИЛуЧЄННЯ СЄСІЙ З ряду послідовних сесій завершується, коли > гпреал^ггідоп Якщо тРеал гПдоп, то остання вилучена сесія повертається в ряд послідовних сесій, тобто визначають оптимально необхідні сесії вимірів Остаточна реальна модель вимірів приймається за оптимальну модель вимірів, а скорочений ряд послідовних сесій за остаточний ряд сесій Розташовують одночасно мінімум три системи GPS послідовно у визначених точках мережі Точки, у яких потрібно розташовувати системи GPS, визначені при формуванні оптимально необхідних сесій вимірів Проводять виміри згідно інструкцій Наприклад, центрують антени приймачів над точками мережі, які закріплені реперами, калібрують приймачі і т д Одержані результати вимірів заносять у комп'ютер і згідно програми визначають положення точок на земній поверхні Для підтвердження переваг даного способу проведено порівняння технічної ефективності та точності існуючого і даних способів Розрахунок КІЛЬКОСТІ сесій та ТОЧНОСТІ визначення координат точок виконано для геодезичної мережі, що складається з 22 точок Використовують три GPSприймачі Результати розрахунку КІЛЬКОСТІ сесій для проведення вимірів існуючим способом наведено у табл 1 Для реалізації вимірів у мережі необхідно 15 сесій вимірів При виконанні оцінки точності визначення координат точок мережі відомим способом точку № 1 взято за вихідну, а точність вимірювання векторів в залежності від довжини визначають за допомогою рівняння т = 5 мм+1 р р т (12) Результати розрахунків наведені у табл 2 З максимальною помилкою, яка дорівнює 7.181 мм, визначено положення точки № 5 Далі наведено розрахунки оптимально необхідних сесій вимірів та точності визначення координат точок тієї ж геодезичної мережі з 22 точок, але даним способом КІЛЬКІСТЬ оптимально необхідних сесій вимірів, згідно даного способу, наведено у табл З З метою коректної постановки завдання у програму визначення оптимально необхідних сесій було поставлено додаткове обмеження на точність визначення координат точок не більше 7,2 мм, тобто точність даного способу має бути не гіршою від існуючого Згідно з табл 3 для реалізації вимірів у мережі запропоновано 12 сесій Результати оцінки точності визначення координат точок мережі запропонованим способом згідно схеми вимірів табл 3 наведено у табл 4 З максимальною похибкою, яка дорівнює 6.182 мм визначено положення точки № 15 Порівняння табл 1 і табл 3 свідчить, що для реалізації вимірів однієї і тієї ж мережі з 22 точок існуючим способом необхідно 15 сесій, а даним - 12 сесій Тобто, схема вимірів даним способом є на 20% економнішою від існуючого Порівняння табл 2 і табл 4 свідчить, що точність вимірів даним способом на 15% краща від 42431 існуючого Максимальна помилка визначення координат даним способом 6,182 мм (точка 15), а існуючим 7,181 мм (точка 5) Із зростанням КІЛЬКОСТІ ТОЧОК В мережі і підвищенням вимог до точності визначення координат точок мережі ефективність способу зростає Таблиця 1 № сесії 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Приймач А 19 19 3 11 1 21 15 3 6 9 9 16 22 22 8 Приймач В 20 1 10 10 13 13 10 4 7 7 10 17 17 20 7 Приймач С 21 2 2 12 12 14 14 5 5 8 15 15 18 18 18 Таблиця 2 № точки 1 2 3 4 5 6 7 m (мм) 4,218 5,540 6,899 6,243 7,181 5,734 6,108 4Q точки 8 9 10 11 12 13 14 m (мм) 5,611 4,405 6,035 4,435 4,153 4,913 5,068 № точки 15 16 17 18 19 20 21 ті (мм) 6,833 5,773 5,497 4,244 5,124 4,832 5,858 Таблиця 3 № сесії 1 2 3 4 5 6 7 8 9 10 11 12 Приймач А 1 1 1 1 1 1 1 1 4 6 6 6 Приймач В 3 2 6 7 9 14 17 19 5 10 12 17 Приймач С 6 4 18 8 13 15 22 21 6 11 16 20 Таблиця 4 № точки 1 2 3 4 5 6 7 m (мм) 4,714 4,502 4,105 5,171 3,006 5,031 5,402 № точки 8 9 10 11 12 13 14 m (мм) 5,031 5,861 6,182 5,861 5,402 5,031 5,402 № точки 15 16 17 18 19 20 21 m (мм) 6,182 3,862 4,876 5,031 5,436 5,402 5,072 42431 ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Киів-133, бульв Лесі Українки, 26 (044)295-81-42, 295-61-97 Підписано до друку 2002 р Формат 60x84 1/8 Обсяг обл -вид арк Тираж 50 прим Зам УкрІНТЕІ, 03680, Киів-39 МСП, вул Горького, 180 (044) 268-25-22
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of points on surface of earth
Автори англійськоюTretiak Kornyliy Romanovych
Назва патенту російськоюСпособ определения положения точек на земной поверхности
Автори російськоюТретьяк Корнилий Романович
МПК / Мітки
МПК: G01C 5/00
Мітки: положення, поверхні, визначення, точок, земній, спосіб
Код посилання
<a href="https://ua.patents.su/5-42431-sposib-viznachennya-polozhennya-tochok-na-zemnijj-poverkhni.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення положення точок на земній поверхні</a>
Спосіб визначення положення осі обертання ротора

Номер патенту: 29303
Опубліковано: 16.10.2000
Автор: Сокол Володимир Моріцевич
Мітки: визначення, обертання, положення, спосіб, ротора, осі
Формула / Реферат:
Спосіб визначення положення осі обертання ротора, який полягає в тому, що вимірювання виконують датчиками, розташованими в площинах, які перетинають вісь симетрії ротора, який відрізняється тим, що в кожній площині розташовують не менше як по три датчики, якими вимірюють одночасно лінійні швидкості V1, V2 і V3 в протистоячих датчикам точках на поверхні ротора при одночасному вимірюванні відстаней S1, S2 і S3 від датчиків до цих точок,...
Спосіб визначення місцеположення точок акупунктури
Номер патенту: 37001
Опубліковано: 16.04.2001
Автори: Крижанівський Володимир Ярославович, Смердова Тетяна Андріївна, Грицюк Ольга Володимирівна
МПК: A61H 39/02
Мітки: точок, спосіб, визначення, місцеположення, акупунктури
Формула / Реферат:
1. Спосіб визначення місцеположення точок акупунктури, який полягає в тому, що встановлюють давач фізичного параметра на поверхні шкіри, переміщують його в передбачуваній зоні знаходження точки акупунктури і за максимальною амплітудою фізичного параметра, який вимірюють, визначають наявність точки акупунктури на місці розміщення давача, який відрізняється тим, що трьохелектродним давачем формують функціональне співвідношення імпедансів двох...
Спосіб визначення температур точок роси природних газів
Номер патенту: 32475
Опубліковано: 15.12.2000
Автори: Немчин Олександр Федорович, Клявлін Валерій Володимирович
МПК: G01N 33/497, G01N 25/66
Мітки: роси, температур, точок, визначення, газів, спосіб, природних
Текст:
...що в зоні регулювання температури, близької до здогадної точки роси, відхилення від значень наведеного коефіцієнту К1 особливо впливає на точність вимірювання точки роси: так відхилення на 25-30% може дати похибку у вимірюванні до 3-5%. На процес регулювання температури впливає також витрата випробуваного газу, що проходить через гігрометр. Вона, згідно з винайденою залежністю, визначається не тільки вищенаведеним співвідношенням площин,...
Індикатор для визначення координат точок акупунктури
Номер патенту: 37110
Опубліковано: 16.04.2001
Автор: Солянко Володимир Пилипович
МПК: A61H 39/02
Мітки: визначення, акупунктури, індикатор, точок, координат
Формула / Реферат:
1. Індикатор для визначення координат, точок акупунктури, що містить лінійку у вигляді двох паралельних напрямних, розташованих з зазором, і елемент, який встановлено з можливістю пересування по лінійці і оснащений отвором, співпадаючим з віссю лінійки, який відрізняється тим, що елемент виконано у вигляді повзуна з закріпленими на ньому двома додатковими лінійками, перпендикулярними напрямним і оснащеними повзунами з вказівними...
Спосіб визначення висотного положення водонафтового контакту в свердловині
Номер патенту: 38598
Опубліковано: 15.05.2001
Автори: Заяць Володимир Петрович, Свягла Василь Михайлович, Гаврилюк Ігор Іванович
МПК: E21B 49/00
Мітки: свердловини, контакту, водонафтового, спосіб, висотного, положення, визначення
Формула / Реферат:
(21)2000074576(54) (57)Дата прийняття рішення 01.02.2001 р.Спосіб визначення висотного положення водонафтового контакту в свердловині, що включає вимірювання тиску по стовбуру свердловини і густини пластових флюїдів, який відрізняється тим, що на основі розподілу значень тиску по стовбуру свердловини і густини пластових флюїдів орієнтовно встановлюють висотне положення водонафтового контакту, здійснюють...
Попередній патент: Спосіб підняття об’єкта, що знаходиться під водою, та підйомний засіб для його здійснення
Наступний патент: Пристрій для монтажу метеорологічних датчиків
Випадковий патент: Пристрій для оцінки ефективності передпосівної обробки насіння сільськогосподарських культур в електромагнітному полі