Спосіб визначення положення осі обертання ротора


Формула / Реферат
Спосіб визначення положення осі обертання ротора, який полягає в тому, що вимірювання виконують датчиками, розташованими в площинах, які перетинають вісь симетрії ротора, який відрізняється тим, що в кожній площині розташовують не менше як по три датчики, якими вимірюють одночасно лінійні швидкості V1, V2 і V3 в протистоячих датчикам точках на поверхні ротора при одночасному вимірюванні відстаней S1, S2 і S3 від датчиків до цих точок, відстаней L1, L2, L3 між датчиками і кутів ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() , нахилу датчиків до відрізків прямих, за якими вимірюють відстані між датчиками, після чого в кожній площині визначають радіус-вектори r1, r2, r3 точок, в яких вимірюють лінійні швидкості, і кути
, нахилу датчиків до відрізків прямих, за якими вимірюють відстані між датчиками, після чого в кожній площині визначають радіус-вектори r1, r2, r3 точок, в яких вимірюють лінійні швидкості, і кути ![]() ,
, ![]() ,
, ![]() між радіус-векторами із співвідношень
між радіус-векторами із співвідношень



![]()
![]()
![]()
після чого в кожній площині визначають зміщення осі обертання ротора у вигляді вектора з початком на осі симетрії, величину ![]() якого та кут
якого та кут ![]() між ним та радіусом r0 ротора, що проходить через точку з вимірюваною лінійною швидкістю, визначають із співвідношень
між ним та радіусом r0 ротора, що проходить через точку з вимірюваною лінійною швидкістю, визначають із співвідношень

після чого по визначених в усіх площинах кінцях векторів зміщення ![]() , що лежать на осі обертання, визначають положення останньої.
, що лежать на осі обертання, визначають положення останньої.
Текст
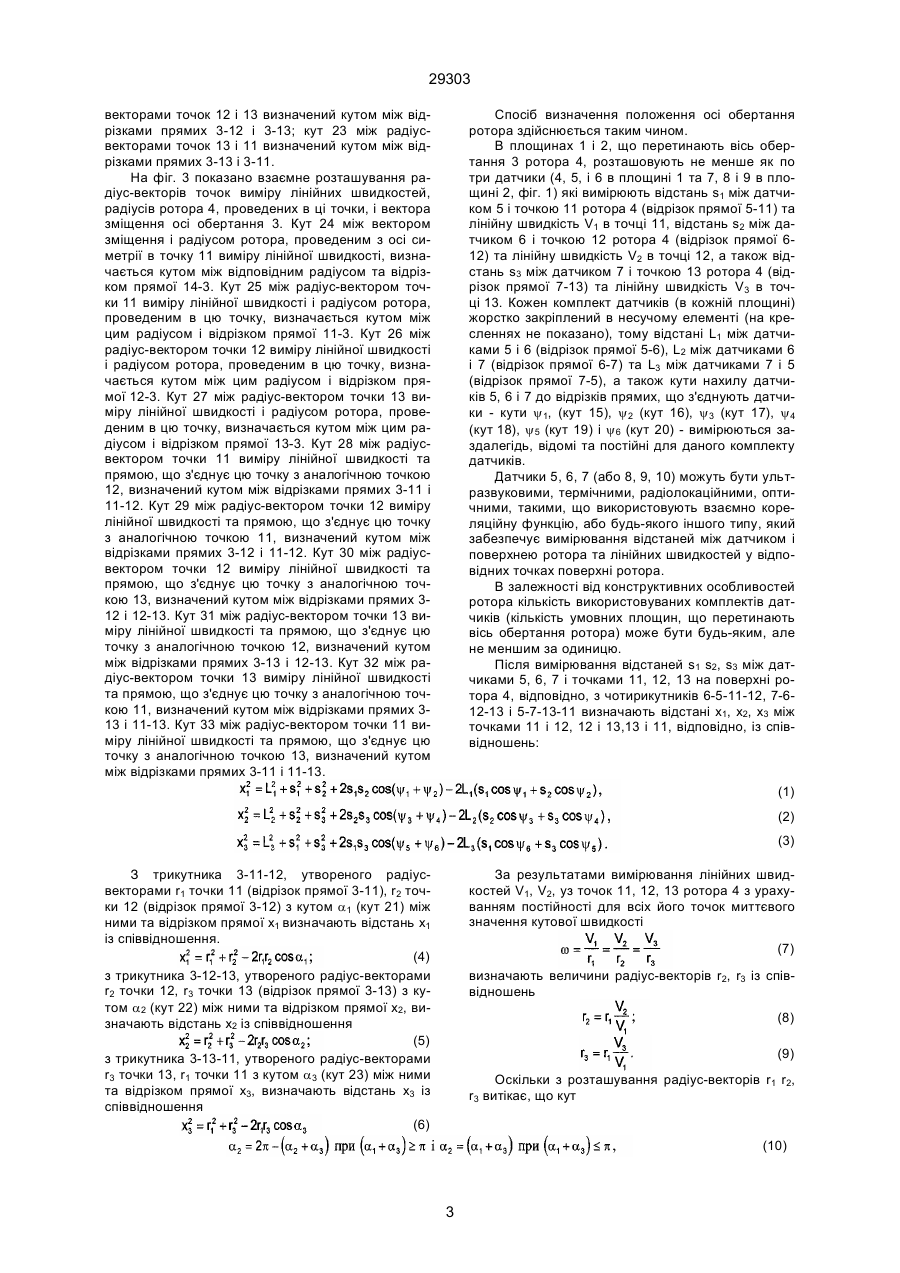
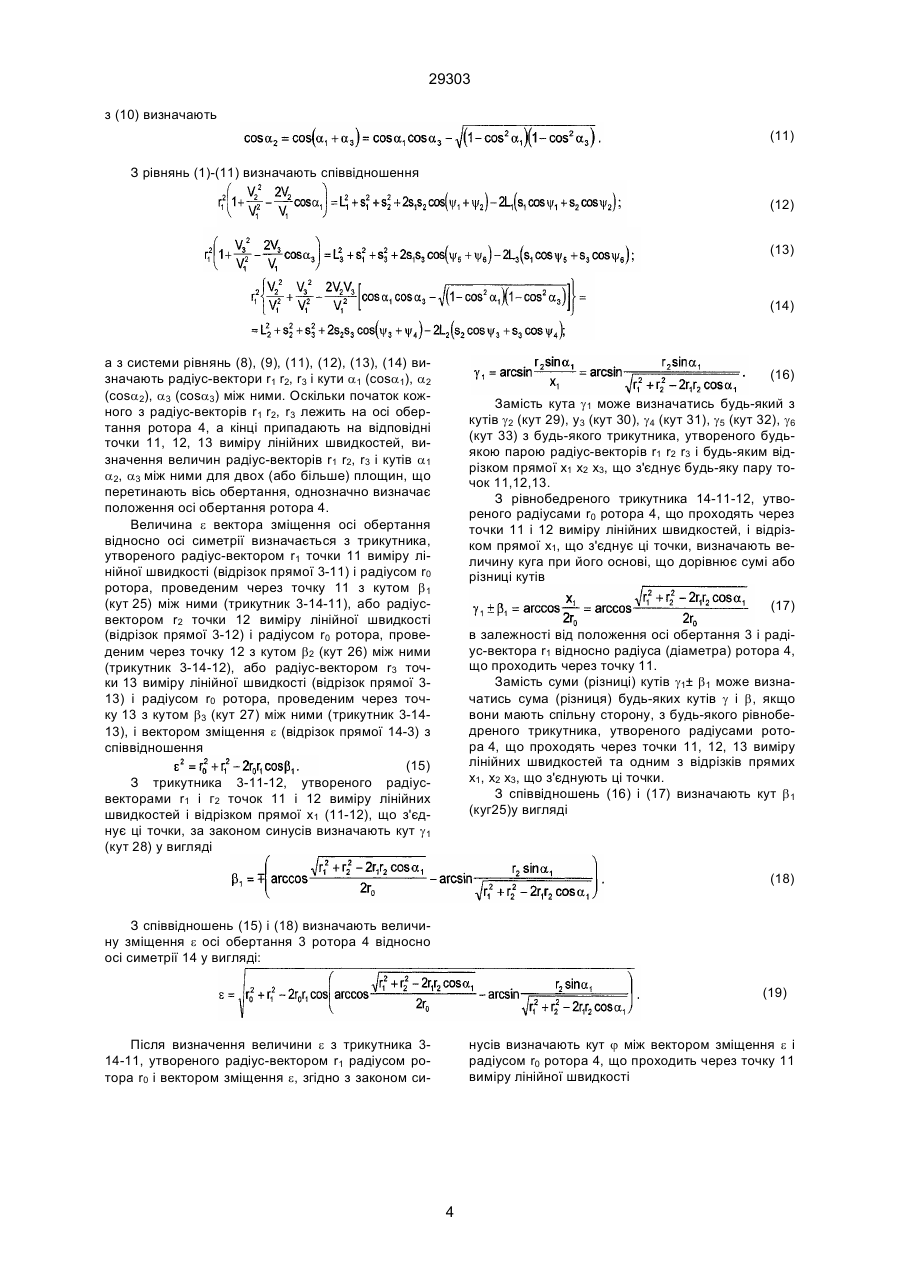
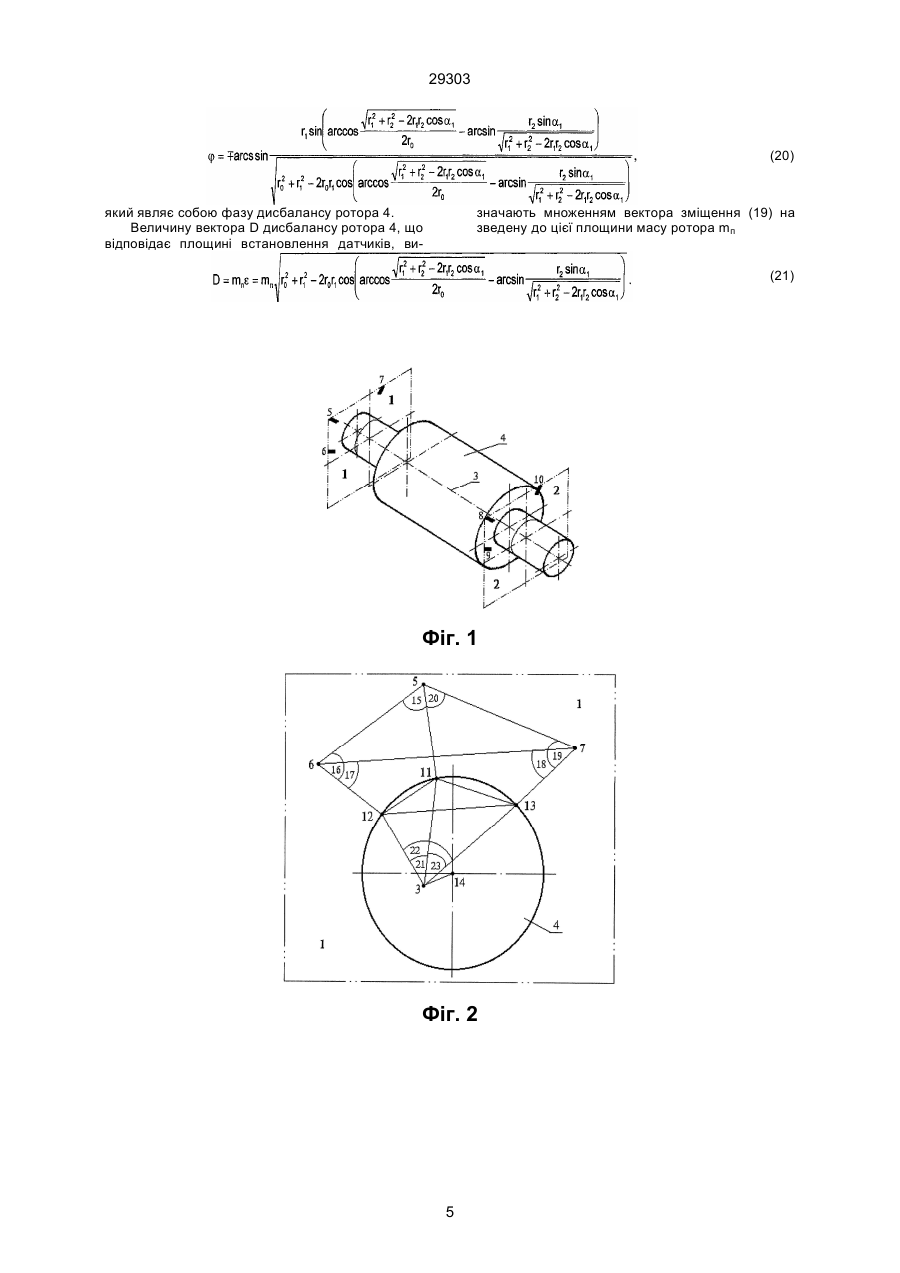
Спосіб визначення положення осі обертання ротора, який полягає в тому, що вимірювання виконують датчиками, розташованими в площинах, які перетинають вісь симетрії ротора, який відрізняється тим, що в кожній площині розташовують Винахід відноситься до вимірювальної техніки і може використовуватись в системах визначення осі обертання ротора та вимірювання величини і фази дисбалансу. (19) після чого по визначених в усіх площинах кінцях векторів зміщення e, що лежать на осі обертання, визначають положення останньої. Відомий спосіб визначення положення осі обертання за її зміщенням e відносно осі симетрії ротора, обумовленим ексцентриситетом маси останнього і обчислюваним за значенням дисба 29303 лансу ротора D=me при відомій масі m ротора, причому величина D дисбалансу визначається за динамічним навантаженням на опори ротора, вимірюваним датчиками динамічного навантаження в двох або більше площинах корекції (Левитський Н.И. Колебания в механизмах. - М: Наука, 1988. - 336 с. – С. 230-239). Недоліком відомого способу є складність визначення положення осі обертання та її зміщення відносно осі симетрії ротора - кінематичних параметрів - за вимірами навантажень на опори ротора з наступним визначенням за цими навантаженнями дисбалансу ротора - динамічного параметра. В основу винаходу покладено задачу створення способу визначення положення осі обертання ротора, в якому шляхом виключення вимірювання динамічних параметрів - навантажень на опори ротора - забезпечується спрощення визначення положення осі обертання. Поставлена задача вирішується тим, що в кожній з площин, що перетинають вісь обертання ротора, не менше як трьома датчиками, відстані L1, L2, L3 між якими та кути y1, y2, y3, y4, y5, y6 їх нахилу до відрізків прямих, за якими визначають ці відстані, виміряні (відомі), одночасно не менше як в трьох точках на поверхні обертового об'єкту вимірюють лінійні швидкості V1, V2, V3 та відстані s1, s2, s3 від датчиків до цих точок, після чого визначають радіус-вектори r1, r2, r3 і кути a1, a2, a3 між радіус-векторами із співвідношень: після чого в кожній площині визначають зміщення осі обертання ротора у вигляді вектора з початком на осі симетрії, величину e якого та кут j між ним та радіусом r0 ротора, що проходить через точку з вимірюваною лінійною швидкістю, визначають із співвідношень після чого по визначених в усіх площинах кінцях векторів зміщення e, що лежать на осі обертання, визначають положення останньої. Суть винаходу пояснюється кресленнями. На фіг. 1 показано площини 1 і 2, які перетинають вісь обертання 3 ротора 4. В площині 1 розташовані датчики 5, 6 і 7, а в площини 2 – датчики 8, 9 і 10, які вимірюють лінійні швидкості в точках на поверхні ротора 4 і відстані від датчиків до цих точок. Розташування елементів в площині 1 показане на фіг. 2 (розташування елементів в площині 2 ідентичне і тому на кресленнях не показане). Датчик 5, який вимірює лінійну швидкість в точці 11 ротора 4, розташовано від цієї точки на відстані, що визначається відрізком прямої 5-11. Датчик 6, який вимірює лінійну швидкість в точці 12 ротора 4, розташовано від цієї точки на відстані, що визначається відрізком прямої 6-12. Датчик 7, який вимірює лінійну швидкість в точці 13 ротора 4, розташовано від цієї точки на відстані, що визначається відрізком прямої 7-13. Зміщення осі обертання 3 ротора 4 по відношенню до його осі симетрії 14 визначається відрізком прямої 14-3. Кут 15 нахилу датчика 5 до відрізка прямої між датчиками 5 і 6 визначений кутом між відрізками прямих 5-11 і 5-6. Кут 16 нахилу датчика 6 до відрізка прямої між датчиками 5 і 6 визначений кутом між відрізками прямих 6-12 і 5-6. Кут 17 нахилу датчика 6 до відрізка прямої між датчиками 6 і 7 визначений кутом між відрізками прямих 6-12 і 6-7. Кут 18 нахилу датчика 7 до відрізка прямої між датчиками 6 і 7 визначений кутом між відрізками прямих 7-13 і 6-7. Кут 19 нахилу датчика 7 до відрізка прямої між датчиками 5 і 7 визначений кутом між відрізками прямих 7-13 і 5-7. Кут 20 нахилу датчика 5 до відрізка прямої між датчиками 5 і 7 визначений кутом між відрізками прямих 5-11 і 5-7. Радіус-вектори точок виміру лінійної швидкості на поверхні ротора 4 визначені таким чином: радіус-вектор точки 11 визначений як відстань від осі обертання 3 ротора 4 до цієї точки (відрізок прямої 3-11); радіус-вектор точки 12 визначений як відстань від осі обертання 3 ротора 4 до цієї точки (відрізок прямої 3-12); радіус-вектор точки 13 визначений як відстань від осі обертання 3 ротора 4 до цієї точки (відрізок прямої 3-13). Кут 21 між радіус-векторами точок 11 і 12 визначений кутом між відрізками прямих 3-11 і 3-12; кут 22 між радіус 2 29303 векторами точок 12 і 13 визначений кутом між відрізками прямих 3-12 і 3-13; кут 23 між радіусвекторами точок 13 і 11 визначений кутом між відрізками прямих 3-13 і 3-11. На фіг. 3 показано взаємне розташування радіус-векторів точок виміру лінійних швидкостей, радіусів ротора 4, проведених в ці точки, і вектора зміщення осі обертання 3. Кут 24 між вектором зміщення і радіусом ротора, проведеним з осі симетрії в точку 11 виміру лінійної швидкості, визначається кутом між відповідним радіусом та відрізком прямої 14-3. Кут 25 між радіус-вектором точки 11 виміру лінійної швидкості і радіусом ротора, проведеним в цю точку, визначається кутом між цим радіусом і відрізком прямої 11-3. Кут 26 між радіус-вектором точки 12 виміру лінійної швидкості і радіусом ротора, проведеним в цю точку, визначається кутом між цим радіусом і відрізком прямої 12-3. Кут 27 між радіус-вектором точки 13 виміру лінійної швидкості і радіусом ротора, проведеним в цю точку, визначається кутом між цим радіусом і відрізком прямої 13-3. Кут 28 між радіусвектором точки 11 виміру лінійної швидкості та прямою, що з'єднує цю точку з аналогічною точкою 12, визначений кутом між відрізками прямих 3-11 і 11-12. Кут 29 між радіус-вектором точки 12 виміру лінійної швидкості та прямою, що з'єднує цю точку з аналогічною точкою 11, визначений кутом між відрізками прямих 3-12 і 11-12. Кут 30 між радіусвектором точки 12 виміру лінійної швидкості та прямою, що з'єднує цю точку з аналогічною точкою 13, визначений кутом між відрізками прямих 312 і 12-13. Кут 31 між радіус-вектором точки 13 виміру лінійної швидкості та прямою, що з'єднує цю точку з аналогічною точкою 12, визначений кутом між відрізками прямих 3-13 і 12-13. Кут 32 між радіус-вектором точки 13 виміру лінійної швидкості та прямою, що з'єднує цю точку з аналогічною точкою 11, визначений кутом між відрізками прямих 313 і 11-13. Кут 33 між радіус-вектором точки 11 виміру лінійної швидкості та прямою, що з'єднує цю точку з аналогічною точкою 13, визначений кутом між відрізками прямих 3-11 і 11-13. Спосіб визначення положення осі обертання ротора здійснюється таким чином. В площинах 1 і 2, що перетинають вісь обертання 3 ротора 4, розташовують не менше як по три датчики (4, 5, і 6 в площині 1 та 7, 8 і 9 в площині 2, фіг. 1) які вимірюють відстань s1 між датчиком 5 і точкою 11 ротора 4 (відрізок прямої 5-11) та лінійну швидкість V1 в точці 11, відстань s2 між датчиком 6 і точкою 12 ротора 4 (відрізок прямої 612) та лінійну швидкість V2 в точці 12, а також відстань s3 між датчиком 7 і точкою 13 ротора 4 (відрізок прямої 7-13) та лінійну швидкість V3 в точці 13. Кожен комплект датчиків (в кожній площині) жорстко закріплений в несучому елементі (на кресленнях не показано), тому відстані L1 між датчиками 5 і 6 (відрізок прямої 5-6), L2 між датчиками 6 і 7 (відрізок прямої 6-7) та L3 між датчиками 7 і 5 (відрізок прямої 7-5), а також кути нахилу датчиків 5, 6 і 7 до відрізків прямих, що з'єднують датчики - кути y1, (кут 15), y2 (кут 16), y3 (кут 17), y4 (кут 18), y5 (кут 19) і y6 (кут 20) - вимірюються заздалегідь, відомі та постійні для даного комплекту датчиків. Датчики 5, 6, 7 (або 8, 9, 10) можуть бути ультразвуковими, термічними, радіолокаційними, оптичними, такими, що використовують взаємно кореляційну функцію, або будь-якого іншого типу, який забезпечує вимірювання відстаней між датчиком і поверхнею ротора та лінійних швидкостей у відповідних точках поверхні ротора. В залежності від конструктивних особливостей ротора кількість використовуваних комплектів датчиків (кількість умовних площин, що перетинають вісь обертання ротора) може бути будь-яким, але не меншим за одиницю. Після вимірювання відстаней s1 s2, s3 між датчиками 5, 6, 7 і точками 11, 12, 13 на поверхні ротора 4, відповідно, з чотирикутників 6-5-11-12, 7-612-13 і 5-7-13-11 визначають відстані х1, х2, х3 між точками 11 і 12, 12 і 13,13 і 11, відповідно, із співвідношень: (1) (2) (3) З трикутника 3-11-12, утвореного радіусвекторами r1 точки 11 (відрізок прямої 3-11), r2 точки 12 (відрізок прямої 3-12) з кутом a1 (кут 21) між ними та відрізком прямої х1 визначають відстань х1 із співвідношення. (4) з трикутника 3-12-13, утвореного радіус-векторами r2 точки 12, r3 точки 13 (відрізок прямої 3-13) з кутом a2 (кут 22) між ними та відрізком прямої х2, визначають відстань х2 із співвідношення (5) з трикутника 3-13-11, утвореного радіус-векторами r3 точки 13, r1 точки 11 з кутом a3 (кут 23) між ними та відрізком прямої х3, визначають відстань х3 із співвідношення (6) За результатами вимірювання лінійних швидкостей V1, V2, уз точок 11, 12, 13 ротора 4 з урахуванням постійності для всіх його точок миттєвого значення кутової швидкості (7) визначають величини радіус-векторів r2, r3 із співвідношень (8) (9) Оскільки з розташування радіус-векторів r1 r2, r3 витікає, що кут (10) 3 29303 з (10) визначають (11) З рівнянь (1)-(11) визначають співвідношення (12) (13) (14) а з системи рівнянь (8), (9), (11), (12), (13), (14) визначають радіус-вектори r1 r2, r3 і кути a1 (cosa1), a2 (cosa2), a3 (cosa3) між ними. Оскільки початок кожного з радіус-векторів r1 r2, r3 лежить на осі обертання ротора 4, а кінці припадають на відповідні точки 11, 12, 13 виміру лінійних швидкостей, визначення величин радіус-векторів r1 r2, r3 і кутів a1 a2, a3 між ними для двох (або більше) площин, що перетинають вісь обертання, однозначно визначає положення осі обертання ротора 4. Величина e вектора зміщення осі обертання відносно осі симетрії визначається з трикутника, утвореного радіус-вектором r1 точки 11 виміру лінійної швидкості (відрізок прямої 3-11) і радіусом r0 ротора, проведеним через точку 11 з кутом b 1 (кут 25) між ними (трикутник 3-14-11), або радіусвектором r2 точки 12 виміру лінійної швидкості (відрізок прямої 3-12) і радіусом r0 ротора, проведеним через точку 12 з кутом b2 (кут 26) між ними (трикутник 3-14-12), або радіус-вектором r3 точки 13 виміру лінійної швидкості (відрізок прямої 313) і радіусом r0 ротора, проведеним через точку 13 з кутом b3 (кут 27) між ними (трикутник 3-1413), і вектором зміщення e (відрізок прямої 14-3) з співвідношення (15) З трикутника 3-11-12, утвореного радіусвекторами r1 і г2 точок 11 і 12 виміру лінійних швидкостей і відрізком прямої х1 (11-12), що з'єднує ці точки, за законом синусів визначають кут g1 (кут 28) у вигляді (16) Замість кута g1 може визначатись будь-який з кутів g2 (кут 29), у3 (кут 30), g4 (кут 31), g5 (кут 32), g6 (кут 33) з будь-якого трикутника, утвореного будьякою парою радіус-векторів r1 r2 r3 і будь-яким відрізком прямої х1 х2 х3, що з'єднує будь-яку пару точок 11,12,13. З рівнобедреного трикутника 14-11-12, утвореного радіусами r0 ротора 4, що проходять через точки 11 і 12 виміру лінійних швидкостей, і відрізком прямої х1, що з'єднує ці точки, визначають величину куга при його основі, що дорівнює сумі або різниці кутів (17) в залежності від положення осі обертання 3 і радіус-вектора r1 відносно радіуса (діаметра) ротора 4, що проходить через точку 11. Замість суми (різниці) кутів g1± b1 може визначатись сума (різниця) будь-яких кутів g і b, якщо вони мають спільну сторону, з будь-якого рівнобедреного трикутника, утвореного радіусами ротора 4, що проходять через точки 11, 12, 13 виміру лінійних швидкостей та одним з відрізків прямих х1, х2 х3, що з'єднують ці точки. З співвідношень (16) і (17) визначають кут b 1 (куг25)у вигляді (18) З співвідношень (15) і (18) визначають величину зміщення e осі обертання 3 ротора 4 відносно осі симетрії 14 у вигляді: (19) Після визначення величини e з трикутника 314-11, утвореного радіус-вектором r1 радіусом ротора r0 і вектором зміщення e, згідно з законом си нусів визначають кут j між вектором зміщення e і радіусом r0 ротора 4, що проходить через точку 11 виміру лінійної швидкості 4 29303 (20) який являє собою фазу дисбалансу ротора 4. Величину вектора D дисбалансу ротора 4, що відповідає площині встановлення датчиків, ви значають множенням вектора зміщення (19) на зведену до цієї площини масу ротора mп (21) Фіг. 1 Фіг. 2 5 29303 Фіг. 3 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2002 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 34 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 6
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of axis of rotation of rotor
Автори англійськоюSokol Volodymyr Moritsevych
Назва патенту російськоюСпособ определения положения оси вращения ротора
Автори російськоюСокол Владимир Морицевич
МПК / Мітки
Мітки: обертання, осі, положення, визначення, ротора, спосіб
Код посилання
<a href="https://ua.patents.su/6-29303-sposib-viznachennya-polozhennya-osi-obertannya-rotora.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення положення осі обертання ротора</a>
Спосіб збільшення швидкості обертання та стабілізації обертання ротора двигуна та пристрій для його здійснення
Номер патенту: 24268
Опубліковано: 07.07.1998
Автори: Ткач Анатолій Анатолійович, Надєін Владислав Семенович
Мітки: стабілізації, здійснення, збільшення, пристрій, швидкості, двигуна, обертання, ротора, спосіб
Формула / Реферат:
1. Способ увеличения скорости вращения и стабилизации вращения ротора двигателя, при котором текущую среду направляют на прижатые к упорам в просвете рамочного маха вращающиеся части составной лопасти, внешнюю и внутреннюю, циклическим воздействием этих частей на упоры рамочного маха с одновременным переводом вращающихся частей других составных лопастей во флюгерное положение, вращают ротор, отличающийся тем, что увеличение мощности и КПД...
Датчик положення ротора вентильного двигуна
Номер патенту: 18440
Опубліковано: 25.12.1997
Автори: Осідач Юрій Володимирович, Літинський Зенон Михайлович, Чайковський Роман Іванович, Ткачук Василь Іванович
МПК: H02K 29/06
Мітки: положення, датчик, ротора, вентільного, двигуна
Формула / Реферат:
Датчик положения ротора вентильного двигателя, содержащий дифференциальные трансформаторы, первичные обмотки которых соединены с выходом преобразователя напряжения высокой частоты, а вторичные обмотки соединены с входами формирующих каскадов, отличающийся тем, что он снабжен шинами "Вперед" и "Назад", и в него введены логический элемент НЕ, первый и второй формирователи длительности импульса, логический элемент...
Пристрій для вимірювання параметрів обертання ротора електродвигуна
Номер патенту: 16801
Опубліковано: 29.08.1997
Автори: Дубровський Володимир Васильович, Загоруйко Валерій Тимофійович, Панченко Костянтин Євгенович
МПК: E21B 45/00
Мітки: пристрій, ротора, обертання, вимірювання, параметрів, електродвигуна
Формула / Реферат:
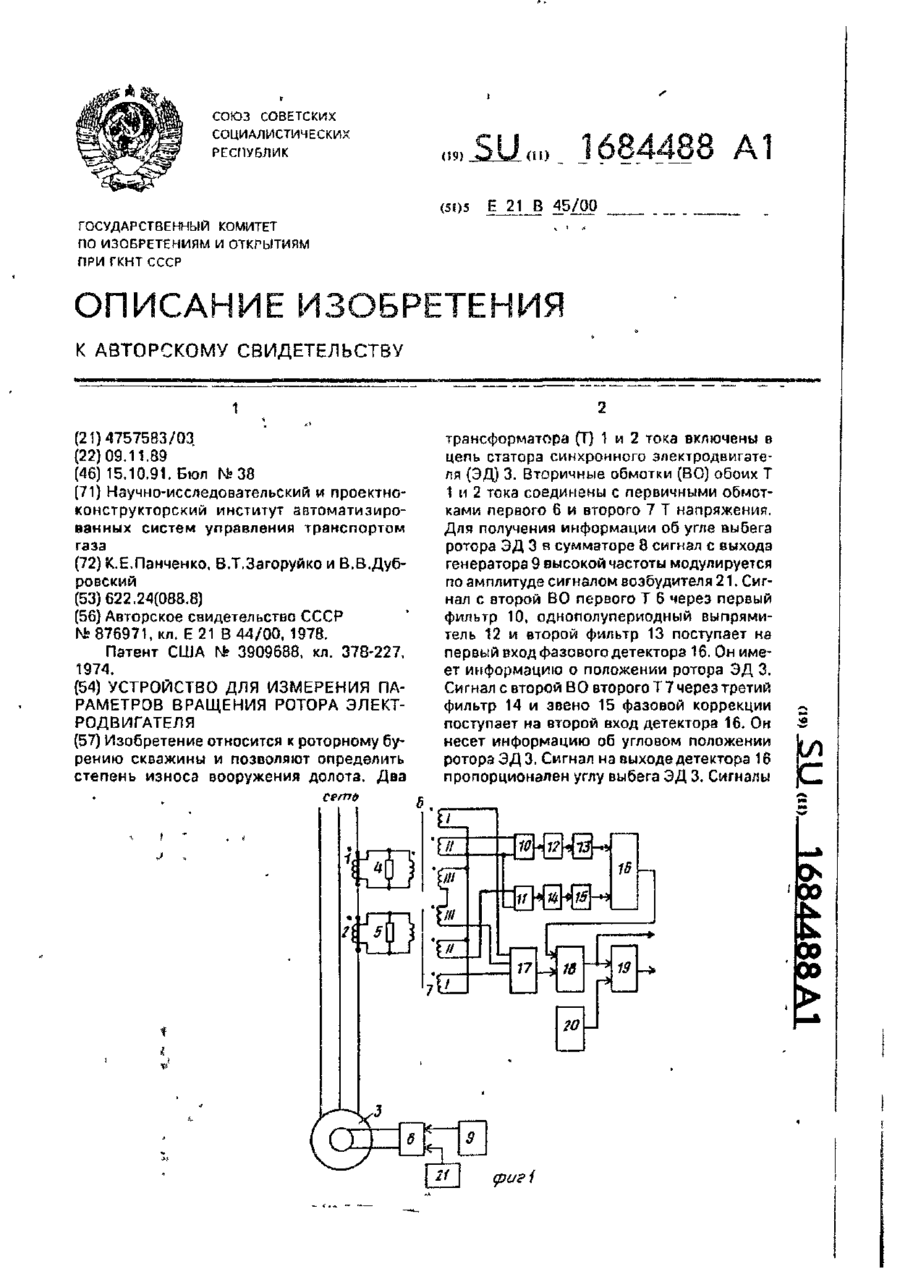
Устройство для измерения параметров вращения ротора электродвигателя, содержащее два трансформатора напряжения, три фильтра, звено фазовой коррекции, фазовый детектор, умножитель, делитель и датчик механической скорости проходки, а также генератор высокой частоты и возбудитель, выходы которых соединены с соответствующими входами сумматора, выход сумматора соединен с обмоткой возбуждения синхронного электродвигателя, отличающееся тем, что,...
Спосіб визначення об’єму довільної фігури обертання
Номер патенту: 17148
Опубліковано: 18.03.1997
Автори: Кормановський Сергій Іванович, Білан Степан Миколайович, Кожем'яко Володимир Прокопович
МПК: H04N 7/18
Мітки: об'єму, довільно, фігури, визначення, обертання, спосіб
Формула / Реферат:
Способ определения объема произвольной фигуры вращения, заключающийся в том, что проецируют изображение объекта на преобразователь свет - сигнал, перемещают изображение объекта по поверхности преобразователя свет - сигнал, отличающийся тем, что проецирование изображения объекта осуществляют так, что плоскость проекции параллельна оси вращения фигуры, перемещают спроецированное изображение объекта вниз до совмещения основания изображения с...
Спосіб визначення положення робочого органу в грунті
Номер патенту: 22148
Опубліковано: 30.04.1998
Автори: Зорін Іван Семенович, Бродський Анатолій Леонідович, Єндовців Ігор Витальович, Теплицький Абрам Хунович
МПК: E02F 5/18, E21B 47/02
Мітки: положення, спосіб, органу, грунті, робочого, визначення
Формула / Реферат:
Способ определения положення рабочего органа в грунте, состоящий в том, что излучают в грунтовой массив радиосигнал и регистрируют сигнал, прошедший через грунтовой массив, приемным устройством с антенной, обрабатывают сигнал и определяют местоположение рабочего органа в плане и по вертикали, отличающийся тем, что на поверхности грунта отмечают горизонтальную проекцию траектории движения рабочего органа, симметрично ей размещают не менее...
Попередній патент: Спосіб підвищення відтворної функції сільськогосподарських тварин
Наступний патент: Спосіб визначення моменту інерції ротора
Випадковий патент: Спосіб виготовлення ікри червоної (імітованої), вітамінізованої протирадіаційної, протипухлинної